2017 International Conference on Computer, Electronics and Communication Engineering (CECE 2017) ISBN: 978-1-60595-476-9
Design of Key Technologies for Simulation Training System of the
Multi-element Observation System
Hui-hua CHENG, Qiong-li LIU,
Jun-xian LIU, Da-wei WANG,
Jing-jing ZHOU and Jin LI
Wuhan Mechanical and Technical College, Wuhan 430075, Hubei Province, China
Keywords: Simulation service, Observation system, General transmission platform, Heterogeneous data exchange, Distributed simulation.
Abstract. The simulation training system for a multi-element observation system integrates several observation subsystems into a whole and can achieve interconnection with the information system through the combination of virtual simulation and physical simulation. Success in developing this training system depends on the design of three key technologies, including general simulation platform, distributed simulation and heterogeneous platform data exchange, which will be designed in this paper to solve key technological difficulties for the system development.
Introduction
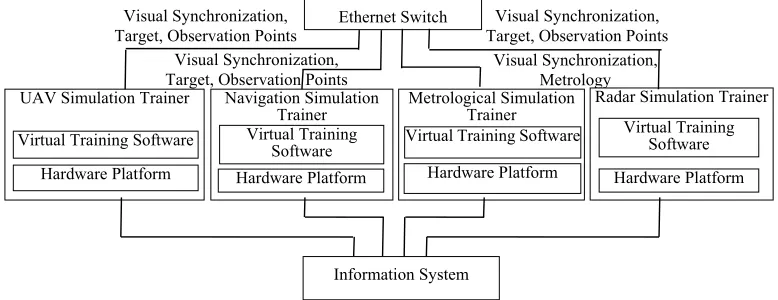
[image:1.612.108.497.477.627.2]The multi-element observation system, made up of UAV observation system, navigation and positioning observation car, metrological observation car and radar observation car, is the important subsystem of an information system. Due to very large size, complexity and high cost, these observation subsystems and the information system are maintained and used by different divisions and staff. This arrangement is unfavorable to give full play to their efficacy, nor good for usual system training or technical inspection of the whole system. Therefore, we develop a simulation training system to solve such problems, whose architecture is shown in Figure 1 below. The development of this system involves three main key technologies, namely general simulation platform, distributed simulation and heterogeneous platform data exchange, which are expatiated in this paper to integrate the training system and finally achieve a variety of its functions.
Figure 1. Architecture of the simulation training system of an element observation system.
Design of General Simulation Platform
A practical observation system has different configurations of UAV observation system, navigation Ethernet Switch
UAV Simulation Trainer Navigation Simulation
Trainer Metrological Simulation Trainer Radar Simulation Trainer
Information System Virtual Training Software
Hardware Platform
Virtual Training Software Hardware Platform
Virtual Training Software Hardware Platform
Virtual Training Software Hardware Platform Visual Synchronization,
Target, Observation Points
Visual Synchronization, Target, Observation Points Visual Synchronization,
Target, Observation Points
quite diverse for different observation systems because of their observing methods and working characteristics. The transmission portion primarily includes three types of transmission equipment, namely communication interface controller, universal interface device and data-voice synchronous transmission terminal.
For example, the navigation and positioning observation car has three configuration modes, connecting to the universal interface device and communication interface controller, or directly to the communication interface controller, or to the data-voice synchronous transmission terminal. Other observation systems generally have two configuration modes, connecting to the universal interface device or the communication interface controller.
To provide better generality and more flexible configuration, a simulation trainer can be configured to be any one of UAV observation system, navigation and positioning observation car, metrological observation car and radar observation car, so as to increase the number of training groups and strengthen the practicality of the system.
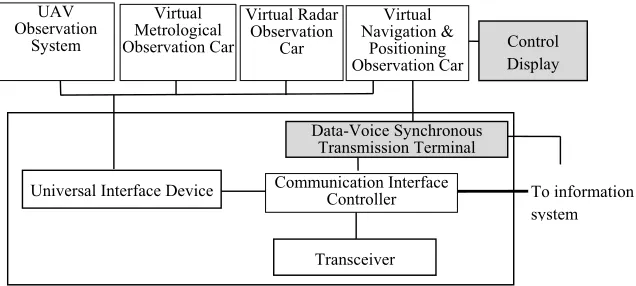
[image:2.612.147.465.349.492.2]For this purpose, the simulation training system carries out the virtual simulation of both observation portions in the observation systems through using the simulation computer. The virtual simulation training software can be configured as the corresponding observation equipment, flexibly configured with very good generality. The three equipment of the transmission portion are integrated, inclusive of communication interface controller, universal interface device and data-voice synchronous transmission terminal, to construct a general transmission platform. Then, the simulation computer and the general transmission platform constitute a general simulation platform with the structure as shown in Figure 2.
Figure 2. Structure of the general simulation platform.
Each of the simulation training systems for UAV observation system, navigation and positioning observation car, metrological observation car and radar observation car have two communication links from the virtual simulation software to the information system. One link is through the universal interface device of the observation equipment connecting to the information system; another link is connecting to the information system directly via the communication interface controller. All of these virtual observation systems connect to the universal interface device or the communication interface controller through RS232 serial port[1]. The transceiver in the system is the terminal for transmission
and receiving of voice synchronous communication.
Moreover, besides the aforesaid two communication links, the virtual training software for the navigation and positioning observation car still has a third link from the data-voice synchronous transmission terminal to the information system, and meanwhile such terminal has different models available for use. The car has a control display to show the status and operating control and hence the simulation trainer should develop the corresponding equipment.
Transceiver Communication Interface
Controller Universal Interface Device
UAV Observation
System
To information system Data-Voice Synchronous
Transmission Terminal
Control Display Virtual
Metrological Observation Car
Virtual Radar Observation
Car
Virtual Navigation &
Design of Distributed Simulation
The virtual simulation platforms of all observation systems in this project must be on a same scene, visually synchronous and interactive. This must be solved by the distributed simulation, the establishment of which is therefore a key to the virtual simulation.
Due to many simulation entities in the system, the motions on a same training scene are uncertain random factors, so there must be a background program for real-time acquisition of the simulation entities, that is to say, motions and status simulated by the virtual simulation of these observation systems, and meanwhile broadcast these motions and status to other virtual simulation software. The background program is the server of the distributed simulation system and the other virtual simulation software of observation systems are clients of this server, viz., software at clients. Through cooperation of the server and the client, the framework and functions of the distributed simulation system are jointly built.
To this end, we systematically design a package of simulation service software as the server of the distributed simulation system and a package of virtual simulation software of observation systems as software at clients, for achieving virtual simulation of the observation systems. In the meantime, upon completing the visually synchronous simulation service functions, we can design some system management function to manage the full system position access, set up the observation equipment type, training scene, point of origin of scene system and scene weather and distribute observed target. The simulation software of observation systems can set the observation equipment type and flexibly switch. The client software is mainly used for accomplishing the simulation training functions of observations, including model simulation and driving of all observation subsystems, visual observation of the training scene, positioning of observation subsystems and real-time target observation[2].
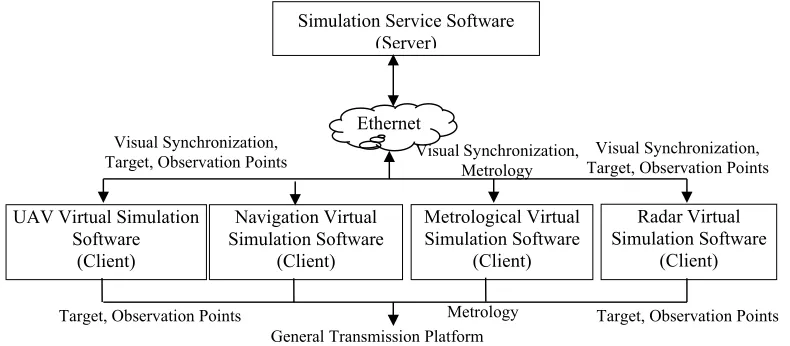
[image:3.612.109.504.393.566.2]By this design, the distributed simulation system architecture is shown in Figure 3.
Figure 3. Architecture of distributed simulation system.
In the distributed simulation system, the Ethernet communication is utilized between the server and clients, the development is realized with WinSocket and UDP programming, and the visually synchronous information, weather, targets, observation points and positioning navigation information are transmitted by way of C/S between the server and the clients of each observation system. The simulation training software client of each observation system observe according to the characteristics of their respective simulation equipment to acquire various observation data from 3D virtual training scene and transmit them to the general transmission platform by serial communication control.
Simulation Service Software (Server)
UAV Virtual Simulation Software
(Client)
Navigation Virtual Simulation Software
(Client)
Metrological Virtual Simulation Software
(Client)
Radar Virtual Simulation Software
(Client) Ethernet
Visual Synchronization,
Target, Observation Points Visual Synchronization,Metrology Target, Observation PointsVisual Synchronization,
General Transmission Platform
Design of Heterogeneous Data Exchange
The simulation training system of the multi-element observation system mainly involves three networks: first, the Ethernet network between the simulation service software at the server and the clients of all observation systems; second, the data communication network between the clients of all observation systems and the general transmission platform; and third, the digital communication network between the general transmission platform and the information system. These communication network structures and systems are different, so certain measures must be taken for interconnection. To solve this problem, a heterogeneous platform is designed for data exchange of this system.
On one hand, visually synchronous information between the simulation service software and all observation systems is divided into upward and downward portions. The upward portion is the visual status and motions reported by the clients of all observation systems to the simulation service software, which thus can collect the running and vision status of the clients of all observation systems. The downward portion mainly indicates the three-dimensional terrain vision of the whole system distributed from the simulation service software to the clients and the visual status of all observation systems on the training scene. The visual synchronous design of the entire system is completed through cooperation of the two portions. It can be found that the visually synchronous service communication must be developed on the basis of Ethernet network because of huge data volume. It is realized by the UDP and WinSocket programming and developed by the combination of fixed service and multicast communication[3]. The corresponding communication protocols and
message formats are developed for the upward and downward portions to complete the upward and downward communications based on the Ethernet network. The communication messages must be updated real time to acquire the real-time and smooth training scene on the server and clients. The virtual simulation training software and in particular the simulation service software have very high requirement for the operation hardware platform and higher requirement for the graphics card performance.
On the other hand, the system management data between the simulation service software and all observation systems, inclusive of the control data, weather data, observed targets and data of observation point access to all positions, must also use communication formats of different formats. Which format of messages is transmitted between clients of observation systems depends on the access positions set by the simulation service software and the type of observation equipment logging onto the clients of all observation systems. Messages of different protocols are distinguished by using different Sockets.
Finally, the data communication between the client software of all observation systems and the general transmission platform must be carried out pursuant to the requirements of equipment in the platform. Therefore, this system designs a communication protocol for the universal interface device, communication interface controller and two different types of data-voice synchronous transmission terminals. The communication protocol must contain equipment information, observation job information, time information and synchronous check. The equipment information mainly includes the observation equipment type and transmitting and receiving address etc. and the observation job information mainly indicates the air temperature, air pressure, wind direction and velocity at different altitudes, observed targets and 3D coordinate data of observation points. The synchronous check indicates the frame synchronization information, error check and control information, including the separators between the message header and tailor and between fields.
Conclusions
A general simulation platform is designed by integrating different observation equipment into the same simulation platform and transmission platform so as to achieve flexibly configured functions. With the design of a distributed simulation system, the simulation service software and the simulation client software of observation systems carry out visually synchronous service of the entire system and the simulation functions of system management and business control by the C/S model. The design of a heterogeneous platform data exchange integrates the Ethernet-based simulation service software with the data communication network among observation system client network, between observation system clients and general transmission platform, as well as the digital communication network between general transmission platform and information system, to realize the system interconnection. After completing the design of these three key technologies, the system framework is constructed for the simulation training system of the multi-element observation system and the technical difficulties are overcome, so the preliminary work for the development of the simulation training system has been accomplished.
References
[1] Behrouz A., Data Communications and Networking. China Machine Press. Beijing, 2007, pp. 292-294.
[2] Information on http://m.douban.com/note/544964721/