www.elsevier.com/locate/sysconle
Output feedback model reference adaptive control for
multi-input–multi-output plants with state delay
Boris M. Mirkin
∗, Per-Olof Gutman
Faculty of Civil and Environmental Engineering, The Division of Environmental, Water, and Agricultural Engineering, Technion, Israel Institute of Technology, Haifa 32000, Israel
Received 5 August 2003; received in revised form 14 October 2004; accepted 14 February 2005 Available online 2 April 2005
Abstract
Two new output feedback adaptive control schemes based on Model Reference Adaptive Control (MRAC) and adaptive laws for updating the controller parameters are developed for a class of linear multi-input–multi-output (MIMO) systems with state delay. An effective controller structure established on a new error equation parametrization is proposed to achieve tracking with the error tending to zero asymptotically. To achieve exact asymptotical tracking, we introduce, in the standard MRAC structure for plants without delay, a new additional adaptive feedforward control component as an output of a dynamical system driven by the reference signal. Adaptive laws are developed using the SPR-Lyapunov design approach and two assumptions regarding the prior knowledge of the high-frequency matrixKp. This work is the first asymptotic exact zero tracking results for this class of systems in the framework of the certainty equivalence approach.
© 2005 Elsevier B.V. All rights reserved.
Keywords: Model reference adaptive control; Multi-input–multi-output (MIMO) state-delay systems; SPR-Lyapunov design; Output
feedback; Stability
1. Introduction
Many physical systems can be modeled by delay differential equations. In these models, time delays are often used to represent the effect of e.g. transmis-sion, and transportation. Often time delays can be used as an approximation of complex models. Much effort has been devoted to providing a theory for the
con-∗Corresponding author. Tel.: +97 248 292629; fax: +97 248 221529.
E-mail address:[email protected](B.M. Mirkin).
0167-6911/$ - see front matter © 2005 Elsevier B.V. All rights reserved. doi:10.1016/j.sysconle.2005.02.008
controllers guarantee that all closed-loop solutions converge to some bounded residual set. An adaptive discontinuous output feedback controller was consid-ered in [16] to achieve exact asymptotic regulation for a class of single-input, single-output systems de-scribed by nonlinear functional differential equations. See also the recent paper for the multi-input–multi-output (MIMO) case [7]. Subsequently, adaptive tracking control was considered for the same class of systems in [17], using a continuous feedback on one hand, and discontinuous feedback on the other hand. Using continuous feedback[17], achieved only practical tracking, i.e. convergence to some bounded residual set. Discontinuous feedback enabled [17], as well as[1] to achieve exact asymptotic tracking, i.e. in the sense that the tracking error asymptoti-cally approaches zero. State feedback Model Refer-ence Adaptive Control (MRAC) was investigated in [19,10].
Recently a new approach [11,12] was developed for the output model reference adaptive control of single-input (u(t)∈ R) single-output (y(t)∈ R) lin-ear continuous-time plants with state delay described by equations, suitably initialized, of the form
˙
x(t)=Ax(t)+Ax(t−)+bu(t), y(t)=cTx(t)
with unknown A,A, b and c of appropriate dimen-sions and known time delay. The main idea is to treat the state delay element not as a part of the plant but rather as the input to the systemW0(s)=cT(Is−A)−1b
and then decompose the control law into two compo-nents. The first base component is designed by a stan-dard MRAC procedure[18,14,8]as for a plant without delayW0(s)but applied to the time-delay plant. The second component is formed by a special adaptively adjusted dynamic system P(s,ff)as a function of the reference signalr(t). This makes it possible to use the well-understood MRAC design technique.
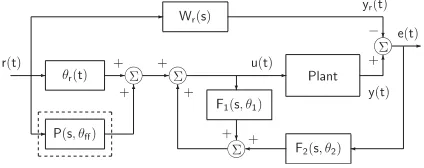
In the framework of the standard MRAC control structure, which is widely used in the control literature for plants without delay, e.g.[18, p. 104]our adaptive controller can be represented by the scheme inFig. 1. From Fig. 1 it is clear that in the feedback path e=y −yr is used instead of y. In addition to the standard memoryless feedforward block withr(t)as the input and with the adjustable gainr(t), there is a prefilterP (s,ff)also withr(t)as the input, with the
Fig. 1. Adaptive control structure with the auxiliary dynamic feed-forwardP (s,ff).
adjustable vector gain ff. The special choice of the
adaptive prefilter structure makes it possible to solve the problem of adaptive exact asymptotic output track-ing under parametric uncertainties for a delay system. In [11,12], it was shown how the prefilter can be de-signed.
The main contribution of the present paper is the design of a new adaptive control scheme which gen-eralizes the results in[12]as follows:1
(i) the class of systems is enlarged to a class of multi-input u(t)∈ Rm multi-output y(t)∈ Rm systems.
(ii) we construct two different types of prefilters P (s,ff), which issue the feedforward
compo-nentuff whose function is to counteract the state
delay.
(iii) the adaptation algorithms are synthesized using the SPR-Lyapunov design approach for two cases of prior knowledge of the high-frequency matrix
Kp.
The structure of the paper is as follows. In Section 2 we formulate the MIMOadaptive control problem. In Section 3 we suggest the new parametrization for the error equation, which leads to a new controller struc-ture. It is developed in Section 4. In Sections 5 and 6 we develop two adaptive designs for asymptotic out-put tracking, when we use two different assumptions concerning the prior knowledge of the high-frequency matrix Kp: the symmetry assumption of[8], or the assumption on the signs of the leading principal mi-nors ofKp[2], respectively. Some final remarks are found in Section 7.
1For simplicity only we consider a single delay. The results
2. Problem statement
In this section we formulate the control problem, including the state delay plant model and the refer-ence model, assumptions and control objective. The uncertain multi-input (u(t)) multi-output (y(t)) linear continuous-time plant with state delay is of the form
˙
x(t)=Ax(t)+Ax(t−)+Bu(t), x(t)∈Rn,
y(t)=Cx(t), y(t)∈Rm, (1)
wherex(t)∈ Rn,y(t)∈ Rmandu(t)∈Rm are, re-spectively, the state, output and control input. The con-stant matrices A,A, and B of appropriate dimensions have unknown elements. The time-delayis assumed to be known. It is also assumed that the states are not accessible and only input–output measurements are available.
It is a specification that all signals of the closed-loop system remain bounded and that the plant output y(t), asymptotically exact, follows the outputyr(t)of a reference model with the transfer function
yr(t)=Wr(s)r(t), (2)
where Wr(s) ∈ Rm×m is a stable rational transfer matrix, and r(t) ∈ Rm is a bounded reference in-put signal. Asymptotic tracking is demanded, i.e. limt→∞e(t) =0.
The following assumptions are made on the plant (1) and the reference model (2): (A1) When there is no term with state delay, the plant (1) can be described by
y=W0(s)u, W0(s)=C(Is−A)−1B ∈Rm×m,
(3)
where W0(s) is the transfer matrix associated with
an undelayed plant; (A2) the observability indexof W0(s)is known; (A3) the transmission zeros ofW0(s)
have negative real parts (minimum phase plants); (A4) W0(s)is strictly proper, full rank, and has vector
rel-ative degree 1, i.e., rank(CB)=m; (A5)A=BA∗T; (A6) in view of the assumption (A4) and without loss of generality, a diagonal SPR reference model is
defined, as in[2],
Wr(s)=diag
1 s+ari
, ari>0, i=1, . . . , m.
(4)
For the high-frequency gain matrix Kp = lims→∞sW0(s)we consider the following two cases:
(A7.1) there is a known matrixSp∈Rm×msuch that
KpSp =(KpSp)T>0, or (A7.2) the signs of the
leading principal minors of the high-frequency gain matrixKpare known.
3. Proposed error equation parametrization
Let us assume that all the parameters of (1) are known, and let us defineu∗1 as the standard matching control[18,8]for the plant without delay (3)
u∗1(t)=∗ey(t)+∗1Tx1(t)+∗2Tx2(t)+∗rr(t), (5)
where
x1=Hm(s)[u∗1], x1∈Rm(−1), (6)
x2=Hm(s)[y], x2∈Rm(−1), (7)
Hm(s)=[Im×ms−2, . . . Im×ms, Im×m]T
(s) ,
Hm(s)∈Rm(−1)×m, (8)
∗1,∗2∈Rm(−
1)×m,∗
e ∈Rm×m,r∗∈Rm×m,(s)= s−1+· · ·+
ms+0is a monic Hurwitz polynomial,
andIm×m∈Rm×mis the identity matrix.
With the definition of(s),Hm(s)andW0(s)in (3),
there exist∗r =K−p1,∗e,∗1and∗2[18,8]such that
∗rW−1
r (s)W0(s)=Im×m−e∗W0(s)−∗1THm(s)
−∗T
2 Hm(s)W0(s). (9)
When applying (5) to the actual plant (1), from (1) and (9) and for any u, the tracking errore=y−yr is given by
e=Wr(s)Kp[u−∗ey−1∗Tx1−∗2Tx2−∗rr
+A∗T
x(t−)−∗1THm(s)A∗ T
x(t−)]. (10)
a new dynamical system
z(t)=∗T
1 Hm(s)[A∗Tx(t−)] =∗ T
z zx(t), (11)
where2 ∗zT= [1∗1TA∗T,1∗2TA∗T, . . . ,1∗(−1)TA∗T]
and
zx(t)=Hn(s)[x(t−)], (12)
Hn(s)=[In×ns
−2, . . . , In
×ns, In×n]T
(s) . (13)
Here Az ∈ Rm×n(−1), zx ∈ Rn(−1), Hn(s) ∈ Rn(−1)×nandIn
×nis then×nidentity matrix.
Remark 1. The transfer function matrixHn(s)from
(13) has the same structure as the transfer matrix Hm(s) from (8), only instead of the identity matrix Im×m in the numerator of (8), we have the identity matrixIn×n.
Secondly, we decompose the signalszxin (12) into two components:zx(t)=ze(t)+zr(t), where ze(t)=Hn(s)[ex(t−)], zr(t)=Hn(s)[xr(t−)], ex(t−)=x(t−)−xr(t−), (14)
wherexr(t)∈ Rnis the state of the reference model (4) with the state space triple(Ar, Br, Cr).
Then, using (11) and (14) from (10) we obtain the basic error equation
e(t)=Wr(s)Kp[u(t)−∗ee(t)−∗1Tx1(t)
−∗T
2 x2(t)−∗rr(t)−∗xTrxr(t)
−∗T
xr(t−)−z∗Tzr(t)] −Wr(s)Kp × [∗T
ex(t−)+z∗Tze(t)], (15) where∗= −A∗ and∗x
r =C T
r∗eT.
Remark 2. Note that ex(t) and ze(t) are not
avail-able for measurement and we shall use them only for analysis.
2Caveat for notation. In this paper a subscript is used to
denote a different vector, e.g. xi, and a superscript is used to denote the kth element of a vector, e.g.xik.
4. Proposed adaptive controller structure
The error parametrization (15) motivates the follow-ing controller structure:
u(t)=e(t)e(t)+T1(t)x1(t)+T2(t)x2(t)
+r(t)r(t)+Txr(t)xr(t)+ T
(t)xr(t−) +T
z(t)zr(t), (16)
where 1,2 ∈ Rm(−1)×m, e,r ∈ Rm×m, xr(t),(t) ∈ Rn×m and z ∈ Rn(−1)×m are the
adaptation gain matrices, x1=Hm(s)[u] ∈Rm(−1),
andx2,Hm(s)taken from (7) and (8).
For clarity, we shall decomposeu(t)as the sum of the two componentsuf(t)anduff(t)
u(t)=uf(t)+uff(t), (17)
which will be defined in the next Sections 4.1 and 4.2.
4.1. The standard control component with output feedback
The first componentuf(t)contains the output
feed-back control component,
uf(t)=ee(t)+T1x1(t)+T2x2(t)+rr(t)
=T
f(t)f(t) (18)
with f = [e,T1,T2,r]T ∈ R2m×m and f =
[eT, xT
1, xT2, rT]T ∈ R 2m. u
f(t) is the “classical”
model matching adaptive control version of (5) which is widely used in MIMOMRAC for plants without time delays, see e.g. the textbooks[18,14,8], with the modification that in (5),e=y−yr is used instead of y.
4.2. The additional dynamical feedforward control component
The second component defines additional feedfor-ward:
uff(t)=Txrxr(t)+Txr(t−)+Tzzr(t)
=T
ff(t)ff(t) (19)
with ff = [Txr,T,Tz]T ∈ Rn(+1)×m and ff(t)=
[xT
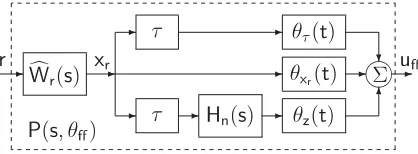
Fig. 2. Structure of the auxiliary adaptive dynamic feedforward systemP (s,ff).
input. In addition to the usual memoryless feedfor-ward termr(t)r(t)with the adjusted gainr(t) con-tained inuf(t), see (18),uff(t)includes terms with the
adjusted matrix gains xr(t), (t) andz(t). uff(t)
is hence formed by a special adaptively adjusted dy-namic system as a function of the reference signal. By denotingWr(s)as the input-to-state transfer function (Is−Ar)−1Br of the reference model (4), the
com-putation ofuff(t)can be represented by the block
di-agram inFig. 2.
This dynamic feedforward system constitutes the main contribution of our approach. Note that when the system does not contain delay, the controller struc-ture reduces to the one used in standard multivariable model reference adaptive control[8].
In the next two sections we will design adaptive laws for the two distinct assumptions, given in Sec-tion 2, about the high-frequency gain matrix Kp. First we use the symmetry conditions ofKp[8] (As-sumption A7.1), and then the as(As-sumption on the signs of the leading principal minors of Kp [2] (Assum-ption A7.2).
5. Adaptive controller: Assumption (A7.1)
Introducing the parameter errors˜f(t)and˜ff(t)and using the adaptive control (17)–(19), the basic tracking error equation (15) can be expressed as
e(t)=Wr(s)Kp[˜Tf(t)f(t)+ ˜ T
ff(t)ff(t)
−∗T
ex(t−)−z∗Tze(t)], (20) where˜f(t)=f(t)−∗f,˜ff(t)=ff(t)−∗ff,∗f =
[∗e,∗T 1 ,∗
T
2 ,∗r]Tand∗ff= [∗ T
xr,∗ T ,∗zT]T. To design the mechanism of updating the controller matrices, the usual way of MRAC for the delay-free
systems is used, see, e.g. [2]. The augmented vector
ˆ
x(t)= [x, x1, x2]T is introduced, and the state of the corresponding nonminimal realizationC(sIˆ − ˆA)−1Bˆ of Wr is denoted by xˆr(t). Then we can write the following state space representation for (20):
de(t)ˆ
dt = ˆAe(t)ˆ + ˆBKp[˜
T
f(t)f(t)+ ˜ T
ff(t)ff(t)
−∗T
lˆTe(tˆ −)−∗zTCeze(t)ˆ ], dzˆe(t)
dt =Aezˆe(t)+Belˆ
Te(tˆ −),
ze(t)=Cezˆe(t),
e(t)=y(t)−yr(t)= ˆCe(t)ˆ , ˆ
l= [In×n,0n×m(−1),0n×m(−1)]T, (21)
wheree(t)ˆ = ˆx(t)− ˆxr(t), the triple(Ae, Be, Ce)is a minimal state space realization for the stable transfer matrixHn(s)from (14), and 0n×m(−1)is a zeron×
m(−1)matrix.
BecauseC(sIˆ − ˆA)−1Bˆ=Wr(s)is SPR, the triple (A,ˆ B,ˆ C)ˆ satisfies the following equations given by the matrix version of KY Lemma, see, e.g.[14,2],
ˆ
ATPˆ+ ˆPAˆ+ ˆQ=0, PˆBˆ= ˆCT, (22)
wherePˆ= ˆPT>0 andQˆ= ˆQT>0. SinceAe in (21) is stable, it also holds that
AT
ePz+PzAe+Qz=0, (23)
where Pz=PzT>0 and Qz=QTz>0. We are now ready to state the main result of this section.
Theorem 1. Consider system (1) and the reference model (4). Suppose that assumptions (A1) to (A7.1) hold. Then the adaptive control (17)–(19) with update laws
˙
Tf(t)= −Spe(t)Tf(t),
˙
T
ff(t)= −Spe(t)Tff(t) (24)
guarantee that all the closed-loop signals are bounded and the tracking error e(t)=y(t)−yr(t)converges to zero asymptotically, i.e. limt→∞e(t) =0.
quadratic Lyapunov function, an appropriate Lyapunov-Krasovskii functional is added as in[12],
V = ˆeTPˆeˆ+ ˆzT
ePzzeˆ + t
t−eˆ
T(s)Qee(s)ˆ ds
+tr(˜f− ˆK1)p(˜f− ˆK1)T+tr(˜ffp˜ T ff),
(25)
whereQe=QTe>0,p=KTpSp−1, wherein the known matrixSp satisfies Assumption A7.1,
ˆ K1= −
r 2[K
−1
p 0 0 0]T (26)
and r is an as yet unspecified positive constant. With this definition of Kˆ1, using p from (25),
e= ˆBTPˆeˆfrom (21) and (22), ˙
f from (24) and
As-sumption (A7.1) we have
tr[ ˆK1p˙˜ T
f] = −tr[ ˆK1pSpe(t)Tf]
= −tr[eTfKˆ1pSp]
= −r 2e(t)ˆ
TPˆBˆBˆTPˆe(t)ˆ .
Then some simple computations using (22), (24) and (26) withQˆ=Q+Qe, Q=QT>0 lead to the deriva-tive of V along the solution of (21),
˙
V|(21)= − ˆeT(t)Qe(t)ˆ −re(t)ˆ TPˆBˆBˆTPˆe(t)ˆ
− ˆzT
e(t)Qzze(t)ˆ − ˆeT(t−)Qee(tˆ −) −2eˆT(t)PˆBˆKp∗TlˆTe(tˆ −)
−2eˆT(t)PˆBˆKp∗zTCezˆe(t)
+2zˆTe(t)PzBelˆTe(tˆ −). (27) For convenience, let us define the matricesQe=(qe1+
qe2+qe3)I,Qz=(qz1+qz2+qz3)I, and the scalar
r=r1+r2, whereqei, qziandri (i=1, . . .)are
posi-tive constants. Note that these constants are only used in the process of the proof and not used in the con-trol design, and hence we can suppose that they take arbitrary positive values.
Combining the second and fifth, second and sixth and third and seventh terms of (27), completing the squares and dropping negative terms, and using the known inequality 2T 1T+ T for any
, ∈Rnand scalar>0, we obtain ˙
V|(21)− ˆeT(t)Qe(t)ˆ −qz3zˆTe(t)zˆe(t)
−qe3eˆT(t−)e(tˆ −)
− ˆeT(t−)
qe1I −
1 r1
1
ˆ e(t−)
− ˆeT(t−)
qe2I−
1 qz12
ˆ e(t−)
− ˆzT
e(t)
qz2−
1 r2z
ˆ
ze(t), (28)
where
1= ˆl∗KTpKp∗TlˆT, 2= ˆlBeTPzPzBelˆT,
z=CTe∗zKpTKp∗zTCe. (29)
Let us select the values ofr1, r2andqe2such that the
following inequalities are satisfied:
r1>
1
qe1max[1], qe2>
1
qz1max[2]
,
r2>
1 qz2
max[z], (30)
where max() is the maximum eigenvalue of .
Then, we obtain from (28)
˙
V|(21)− ˆeT(t)Qe(t)ˆ −qz3zˆTe(t)zˆe(t)
−qe3eˆT(t−)e(tˆ −)0. (31)
This implies[5]that V and, therefore,e(t), e(t)ˆ ,zˆe(t),
f, f, ff,ff ∈ L∞. This fact is central to the remainder of the stability analysis, which follows di-rectly using the steps in[8].
Because e(t)ˆ = ˆx(t)− ˆxr(t) and xˆr(t) ∈ L∞, it holds thatx(t)ˆ = [xT(t),x1T(t), x2T(t)]T∈L∞, which implies that x(t), x1(t), x2(t)andy(t) ∈ L∞. Since r(t) is uniformly bounded and the transfer matrix Hn(s) from (14) is stable, f = [eT, x1T, x2T, rT]T andff(t)= [xrT(t), xrT(t−), zTr(t)]T are bounded. Consequently u(t)=uf(t)+uff(t) is also bounded. Therefore, all the signals in the closed-loop system are bounded. From (25) and (31) we establish that
ˆ
e(t) and therefore e(t) ∈ L2. Furthermore, using
ˆ
6. Adaptive controller: Assumption (A7.2)
To avoid the quite restrictive Assumption (A7.1), we will use in this section the recent results for multivari-able MRAC design in[2] for plants without delays. The design in[2]is based on theSDU factorization [13]of the high-frequency gain matrixKp, with the assumption that the signs of the leading principal mi-nors of Kp are known. Such an assumption is less restrictive than the symmetry condition in Assumption (A7.1). The following preliminary lemmas are needed.
Lemma 1 (Costa et al.[2]). Everym×mmatrixKp with nonzero leading principal minors 1, . . . ,m
can be factored asKp =SDU, where S is sym-metric positive definite,Dis diagonal, and U is unity upper triangular.
This factorization ofKp is convenient because of the distinct role played by each of its factorsS, D and U. The role ofSis to assure one that theWr(s)S is SPR. The rôle ofDis to enable a straightforward extension of the SISOassumption about the sign of the high-frequency gain. The rôle of U is to allow its absorption by the controller parametrization[2].
Lemma 2 (Costa et al.[2]). For anyWr(s)from (4) a positive definiteS=ST>0 exists such thatWr(s)S is SPR.
Substituting theSDU factorization ofKp in the basic error equation (15), and using the decomposition
Uu=u−(Im×m−U)
as in[2], we obtain
e(t)=Wr(s)SD[u(t)−(I−U)u(t)−U∗ee(t) −U∗T
1 x1(t)−U2∗Tx2(t)−U∗rr(t)
−U∗T
xr xr(t)−U∗ T
xr(t−) −U∗T
z zr(t)] −Wr(s)SD × [U∗T
ex(t−)+U∗zTze(t)]. (32)
By definingˆ∗e=U∗e,ˆ∗1T=U1∗T,ˆ∗2T=U2∗T,ˆ∗r= U∗r,ˆ∗u=(Im×m−U)u,ˆ∗xT
r =U∗ T
xr,ˆ
∗T
=U∗T,
ˆ
∗zT=U∗T
z , andˆ∗
T
z =U∗zT, we obtain from (32) e(t)=Wr(s)SD[u(t)− ˆ∗ee(t)− ˆ∗
T 1 x1(t)
− ˆ∗2Tx2(t)− ˆ
∗
rr(t)− ˆ∗uu− ˆ∗
T
xrxr(t)
− ˆ∗Txr(t−)− ˆ∗
T
z zr(t)] −Wr(s)SD × [ˆ∗Tex(t−)+ ˆ∗
T
z ze(t)]. (33)
We can rewrite (33) as
e(t)=Wr(s)SD[u(t)−Kf∗T(t)¯f(t)−∗ffT(t)ff(t)]
−Wr(s)SD[ˆ∗Tex(t−)+ ˆ∗zTze(t)], (34) where
Kf∗= [ˆ
∗
e,ˆ∗
T 1 ,ˆ
∗T 2 ,ˆ
∗
r,ˆ∗u]T,
∗
ff= [ˆ
∗T
xr,ˆ
∗T ,ˆ∗
T
z ]T, ¯
f= [eT, x1T, x2T, rT, uT]T,
ff = [xrT(t), xrT(t−), zTr(t)]T. (35)
In order to remove the zero entries from the above parametrization, we introduce, as in [2], the new pa-rameter vectorsfi via the identity
[∗1T
f 1f· · ·∗fkTkf· · ·f∗mTmf]T=Kf∗T¯f. (36)
In addition to the concatenated kth rows of the matrices ˆ
∗e, ˆ∗1, ˆ2∗, ˆ∗r, each row vector ∗fkT includes the unknown entries of the kth rows of ˆ∗u. The strictly upper triangularity ofˆ∗uensures that the control signal is implementable without singularity.
The corresponding regressor vectors are
1
f(t)= [ ˆ T
f, u2, u3. . . , um−1, um]T,
2
f(t)= [ ˆ T
f, u3, . . . , um−1, um]T,
... mf (t)= [ ˆ
T f]
T. (37)
This new parametrization motives the following con-troller structure instead of (17)–(19)
u(t)= [1T
f (t)1f(t)· · ·kfT(t)kf(t)· · ·mfT(t)
×m
f (t)]T+ T
and gives the following error equation instead of (34)
e(t)=Wr(s)SD
1T
f (t)1f(t)
...
mT
f (t)mf(t)
−
1∗T
f (t)1f(t)
...
m∗T
f (t)mf(t)
+T
ff(t)ff(t)−∗ffT(t)ff(t)
−Wr(s)SD[ˆ∗Tex(t−)+ ˆ∗zTze(t)]. (39) Remark 3. Is it easy to see from (38), that in this case as well as in (17)–(19), the first control component with output feedback
uf(t)= [1Tf (t)1f(t)· · ·kfT(t)
×k
f(t)· · ·mfT(t)mf (t)]T (40)
is identical to the controller for MIMOplants without delay in[2]. In this case, the new additional feedfor-ward component uff(t)has the same structure as in (19).
Introducing the parameter errorskf(t)=kf(t)−
∗k
f , k=1, . . . , mandff(t)=ff(t)−∗ff, the equa-tion for the tracking error follows from (39),
e(t)=Wr(s)SD[(1T
f (t)1f(t)· · ·
kT f (t)
×kf(t)· · ·
mT
f (t)mf(t))T+ T
ff(t)ff(t)]
−Wr(s)SD[ˆ∗Tex(t−)+ ˆ∗zTze(t)]. (41) As in Section 5, the augmented vector x(t)¯ = [x, x1, x2]T is introduced, and the state of the
corre-sponding nonminimal realization C(sI¯ − ¯A)−1B¯ of Wr(s)S, (C¯B¯=S) is denoted byx¯r(t). Then we can write the following state space representation of (41)
˙¯
e(t)= ¯Ae¯+ ¯BD[(1Tf (t)1f(t)· · ·
kT f (t)
×k
f(t)· · ·
mT
f (t)mf (t)) T+T
ff(t)ff(t)]
− ¯BD[ˆ∗TlˆTe(t¯ −)+ ˆ∗T
z Cez¯e(t)], ˙¯
ze(t)=Aeze(t)¯ +BelˆTe(t¯ −),
ze(t)=Ceze(t)¯ ,
e(t)=y(t)−yr(t)= ¯Ce(t)¯ . (42)
Because C(sI¯ − ¯A)−1B¯ =Wr(s)S is SPR [2], the triple (A,¯ B,¯ C)¯ satisfies the following equations, as in (22),
¯
ATP¯+ ¯PA¯+ ˆQ=0, P¯B¯= ¯CT, (43)
whereP¯ = ¯PT>0 and Qˆ =Qe+Q. To design the update laws, we use the functional
V = ¯eTP¯e¯+ ¯zT
ePzz¯e+ t
t−e¯ T(s)Q
ee(s)¯ ds
+tr(˜ff−1D¯˜ T ff)
+ m
k=1
(k
f)−
1|dk|(k f − ¯K1k)
T(k
f − ¯K1k), (44)
wherekf>0,=T>0,D¯=diag{d1. . .dk. . .|dm|}, whereindkare the entries ofD, and
¯
K1k= −r(dk)−1[I, 0, . . . , 0]T. (45)
The vectorsK¯1k have the same dimension askf, and r is an “artificial” gain parameter whose value will be specified later. Let the adaptation algorithm be
˙
kf = −kfsign(dk)kfek, k=1, . . . , m,
˙
Tff= −Sign(D)e(t)Tff(t), (46)
where Sign(D)=diag{sign(d1), . . . ,sign(dm)}. With this adaptation algorithm, the time derivative of (44) along the trajectories of the error system (42) becomes
˙
V|(42)= − ¯eT(t)Qe(t)¯ − ¯re(t)¯ TP¯B¯B¯TP¯e(t)¯
− ¯zT
e(t)Qzz¯e(t)− ¯eT(t−)Qee(t¯ −) −2e¯T(t)P¯BD¯ ˆ∗TlˆTe(t¯ −)
−2e¯T(t)P¯BD¯ ˆ∗zTCeze(t)¯
Using the same arguments as in Section 5 above, we have
˙
V|(42)− ¯eT(t)Qe(t)¯ −qz3z¯Te(t)ze(t)¯
−qe3e¯T(t−)e(t¯ −)
− ¯eT(t−)
qe1I−
1 r1 ¯ 1 ¯ e(t−)
− ¯eT(t−)
qe2I−
1 qz1
¯
2
¯ e(t−)
− ¯zT
e(t)
qz2−
1 r2 ¯ z ¯
ze(t), (48)
where
¯
1= ˆlˆ
∗
DDˆ∗ T
lˆT, ¯2= ˆlBeTPzPzBelˆT,
¯
z=CeTˆ∗zDDˆ∗
T
z Ce (49)
and, as in (30), after the choice ofr1, r2andqe2
sat-isfying the inequalities
r1>
1 qe1
max
¯
1
, qe2>
1 qz1
max
¯
2
,
r2>
1 qz2max
¯
z, (50)
we obtain from (48)
˙
V|(42)− ˆeT(t)Qe(t)ˆ −qz2zˆeT(t)zˆe(t)
−qe3eˆT(t−)e(tˆ −)0. (51)
By applying the same arguments as in Theorem 1 it can be shown that limt→∞e(t) =0.
All this leads to the main result of this section.
Theorem 2. Consider the closed-loop system defined by the plant in (1), the controller in (38), and the updating algorithms in (46) with Assumption 7.2. Then the following two properties hold:
(i) all signals of the closed-loop system are bounded, (ii) limt→∞e(t) =0.
7. Example
To illustrate the application of the proposed adaptive scheme, let us consider an unstable system described
by the model
˙ x(t)=
1.0 0
0 1.0
x(t)+
2.0 3.0 4.0 5.0
x(t−)
+
−1.0 2.0 3.0 1.0
u(t),
y(t)=
1.0 0 0 1.0
x(t), x(0)=
1.0 −1.0
. (52)
To build the adaptive controller we chose the reference model
˙ xr(t)=
−1.0 0 0 −1.0
xr(t)+
1.0 0
0 1.0
r(t),
yr(t)=
1.0 0 0 1.0
xr(t), x(0)=
0 0
. (53)
In this task all the parameters exceptare unknown to the controller. The only information available to the controller is the structural information given in As-sumptions A1–A7. The parameters of the non-delayed part of the plant model (52) are taken from[6].
Simulation results are shown inFigs. 3–5, where we show the time responses of the output of the planty(t), the output of the reference modelym(t), the tracking errore(t)and the tracking error norm.
Figs. 3 and 4 were generated by the plant model (52), the controller (38), (46), and the reference model (53) with
r(t)=
sin(t)+2 sin(3t)+3 sin(0.5)t cos(0.5t)+2 cos(2t)+3 cos(0.3t)
and the plant state delay=5. The parameter values of the controller are sign(d1)= −1, sign(d2)=1 and
1
f =2f=100.
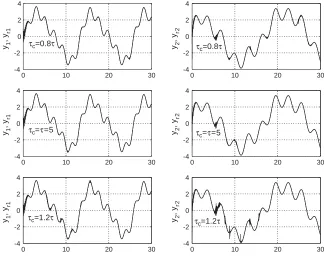
The robustness of the adaptive control law to delay uncertainty is illustrated inFig. 4, where we show the time history of the plant and reference model outputs yt=[y1(t), y2(t)]Tandyr(t)=[yr1(t), yr2(t)]T, for the case, when the delay valuec, used in the controller, differs from the plant delay value.
Fig. 5 was generated with the use of controller (17)–(19), (24), the plant model (52) with=3, and the reference model (53) with a square-wave reference signalr(t). We chose the parameter
Sp=
−14.2857 28.5714 300.00 14.2857
[image:9.544.44.258.119.299.2]0 5 10 15 20 25 30 -4
-2
-4 -2 0 2 4
y1
, y
r1
0 5 10 15 20 25 30
0 2 4
y2
, y
r2
0 5 10 15 20 25 30
0 0.5 1
error norm
Time
τc=τ=5
τc=τ=5
[image:10.544.117.428.95.343.2]τc=τ=5
Fig. 3. Simulation of the adaptive control system for the plant with state delay (52) and the controller (38), (46). The upper, middle and lower graphs show the time history of the plant and reference model outputsyt= [y1(t), y2(t)]T,yr(t)= [yr1(t), yr2(t)]T, and the error norm, respectively.
0 10 20 30
-4 -2 0 2 4
0 10 20 30
-4 -2 0 2 4
0 10 20 30
-4 -2 0 2 4
0 10 20 30
-4 -2 0 2 4
0 10 20 30
-4 -2 0 2 4
0 10 20 30
-4 -2 0 2 4
y1
, y
r1
y1
, y
r1
y1
, y
r1
y2
, y
r2
y2
, y
r2
y2
, y
r2
τc=0.8τ
τc=τ=5
τc=1.2τ τ
c=1.2τ τc=τ=5 τc=0.8τ
[image:10.544.108.435.389.645.2]0 5 10 15 20 25 30 0
0.5
-0.5
-0.5
-0.5 e1
e2
0 5 10 15 20 25 30
0 0.5
0 5 10 15 20 25 30
0 0.5 1
-1
Time r1
, r2
r1
[image:11.544.116.427.90.338.2]r2
Fig. 5. Simulation of the adaptive control system for the plant with state delay (52) and the controller (17)–(19), (24). The upper, middle and lower graphs show the time history of the error componentse1(t),e2(t)and the reference model inputsr1(t)andr2(t), respectively.
The demonstrated robustness property allows us to hope that in the future it will become possible to re-lax the restrictive assumption about knowing the plant delay. This topic is currently under investigation.
8. Conclusion
Two new output feedback adaptive control schemes based on Model Reference Adaptive Control (MRAC) and adaptive laws for updating the controller pa-rameters are developed for a class of linear multi-input–multi-output (MIMO) systems with state delay. An effective controller structure established on a new error equation parametrization is proposed to achieve tracking with asymptotical zero error. To achieve exact asymptotical tracking, we introduce, in the stan-dard MRAC structure for the plants without delay, a new adaptive feedforward control component as an output of a dynamical system driven by the reference signal. The feedforward prefilter design procedure is developed to determine the necessary feedforward dynamic system which satisfies design conditions for two different assumptions about the prior knowledge
of the high-frequency matrixKp: the symmetry as-sumption of[8], and the assumption on the signs of the leading principal minors ofKp [2], respectively. The proposed adaptive control law constructions make economical use of known results of MIMOmodel ref-erence adaptive control to the considered class of de-layed system. Adaptive laws are developed using the SPR-Lyapunov design approach. A simple simulation example is given to show the potential of the proposed technique. This work is the first asymptotic exact zero tracking results for this class of systems in the frame-work of the certainty equivalence approach.
Acknowledgements
References
[1]F. Blanchini, E.P. Ryan, A Razumikhin-type lemma for functional differential equations with application to adaptive control, Automatica 35 (1999) 809–818.
[2]R.R. Costa, L. Hsu, A.K. Imai, P. Kokotovi´c, Lyapunov-based adaptive control of MIMOsystems, Automatica 39 (7) (2003) 1251–1257.
[3]S.G. Foda, M.S. Mahmoud, Adaptive stabilization of delay differential systems with unknown uncertain bounds, Int. J. Control 71 (2) (1998) 259–275.
[4]K. Gu, S.-I. Niculescu, Survey on recent results in the stability and control of time-delay systems, J. Dyn. Syst. Meas. Control 125 (2) (2003) 158–165 (special issue: Time delayed systems).
[5]J.K. Hale, S.M.V. Lunel, Introduction to Functional Differential Equations, Springer, New York, 1993.
[6]L. Hsu, R. Costa, A.K. Imai, Multivariable adaptive control with transient overparametrization, in: Proceedings of the 42nd IEEE Conference on Decision and Controls, Hyatt Regency Maui, Hawaii, USA, 2003.
[7]A. Ilchman, E.P. Ryan, On gain adaptation in adaptive control, IEEE Trans. Automat. Control 48 (5) (2003) 895–899. [8]P.A. Ioannou, J. Sun, Robust Adaptive Control, Prentice-Hall,
Englewood Cliffs, NJ, 1996.
[9]M.S. Mahmoud, Adaptive control of a class of time-delay systems with uncertain parameters, Int. J. Control 63 (5) (1996) 937–950.
[10]B.M. Mirkin, Combined direct and indirect adaptive control for plants with state time delay, Vestnik MUK 13 (1) (2001) 45–48 (in Russian).
[11]B.M. Mirkin, P.O. Gutman, Output adaptive model reference control of linear continuous state-delay plant, in: Proceedings of 15th International Symposium on the Mathematical Theory of Networks and Systems, 12–16 August, Notre Dame, USA, 2002.
[12]B.M. Mirkin, P.O. Gutman, Output-feedback model reference adaptive control for continuous state delay systems, J. Dyn. Syst. Meas. Control 125 (2) (2003) 257–261 (special issue: Time delayed systems).
[13]A.S. Morse, A gain matrix decomposition and some of its applications, Syst. Control Lett. 21 (1993) 1–10.
[14]K.S. Narendra, A.M. Annaswamy, Stable Adaptive Systems, Prentice-Hall, New York, 1989.
[15]S. Oucheriah, Adaptive robust control of class of dynamic delay systems with unknown uncertainty bounds, Int. J. Adapt. Control Signal Process. 15 (2001) 53–63.
[16]E.P. Ryan, C.J. Sangwin, Controlled functional differential equations and adaptive stabilization, Int. J. Control 74 (1) (2001) 77–90.
[17]E.P. Ryan, C.J. Sangwin, Controlled functional differential equations and adaptive tracking, Syst. Control Lett. 47 (2002) 365–374.
[18]S. Sastry, M. Bodson, Adaptive Control Stability, Convergence, and Robustness, Prentice-Hall, Englewood Cliffs, NJ, 1989.