ROBOT TRAJECTORY TRACKING WITH ADAPTIVE RBFNN-BASED FUZZY SLIDING MODE CONTROL
Full text
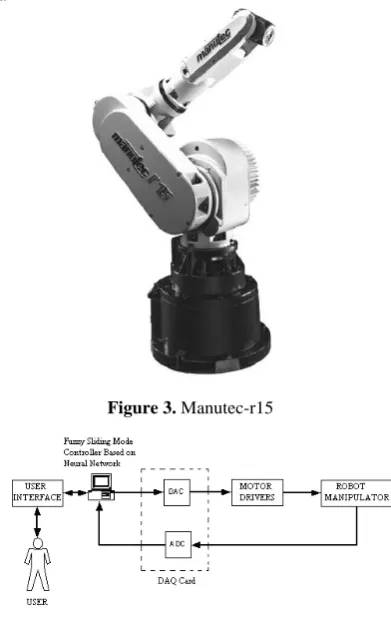
Figure


Related documents
Methods: By combining the strong binding ability between phosphate-terminated aptamers and Zr-based nanoscale metal-organic frameworks (Zr-NMOFs) and the intercalation
Kırkgöz Kaynağı (Antalya-Türkiye)’nda Yaşayan Aphanius mento (Heckel in: Russegger, 1843) (Osteichthyes: Cyprinodontidae)’nun Üreme
The findings indicate significant differences in the importance of early warning indicators between target companies of different size (micro, medium-size, and
TEST TASK: You will be presented with situations in which you must apply knowledge of advanced nutrition and dietetics in order to answer the question correctly..
In the present study, magnetic core-shell manganese ferrite nanoparticles (MCMNP) were synthesized and used for construction of a magnetic core-shell manganese
However, when the number of training graphs is considerably large (25,000 graphs or more), the training time for both gBoost and igBoost increase dramatically (about 50,000
Deputy Chief, Major Frauds Section Assistant United States Attorney Central District of California Los
(The degree of concurrency is usually bounded by memory contention concerns in any case). Deciding the scope of a version number is similar to deciding on the granularity of lock-
