TECHNICAL REPORT DCIC-ESCOM-IPN, JANUARY 2013. —G. J. MART´INEZ / L. N. O. MORENO 1
¿Desarrollo de Rob´otica en M´exico?
Robotics in Mexico?
Genaro Ju´arez Mart´ınez
Luz No´e Oliva Moreno
Resumen—En este reporte realizamos una r´apida revisi´on acerca del desarrollo de la rob´otica en M´exico, aproximando su realidad con respecto al desarrollo en otros pa´ıses conocidos como destacados en esta ´area. Anticipamos que M´exico presenta un escenario donde no es posible hablar de avances o adelantos de impacto. Sin embargo, daremos a conocer algunos aspectos que permitir´an entender del porqu´e de esta situaci´on. En este documento llevamos a cabo un an´alisis comparativo con tres casos particularmente interesantes. Discutiremos los ejemplos de: elLaboratorio de Rob´otica de Bristol(Bristol Robotics Laboratory – BRL) y elCentro Internacional de Computaci´on No-Convencional (International Center of Unconventional Computing – ICUC) en Bristol, Inglaterra. El Museo Nacional de Ciencias Emergentes e Inovaci´on (The National Museum of Emerging Science and Innovation – Miraikan) en Tokio, Jap´on, y el proyectoCyberDoll en Marsella, Francia. Al final presentamos una propuesta b´asica por donde este campo podr´ıa crecer con mejores oportunidades en M´exico.
Palabras clave: Rob´otica, M´exico, BRL, ICUC, Miraikan, CyberDoll, computaci´on.
Abstract—The present report discuss a quick status about robotics development in Mexico, approaching a number of issues and real limitations with respect to other countries well-known developed in the field. Lamentably, Mexico display a slow develop of robotics and advances, including a poor impact in international journals. Nevertheless, we made a comparative analysis mainly from some representative institutions working in robotics. The first one comes with Bristol Robotics Laboratory (BRL) and the International Center of Unconventional Computing (ICUC) in Bristol, England. The second one comes with the National Museum of Emerging Science and Innovation (Miraikan) in Tokyo, Japan. So, a third study comes with the project Cyber-Dollin Marseilles, France. Finally, we present a brief and basic proposal where Mexico could find a better way to develop practical and economical robots.
Index Terms—Robotics, Mexico, BRL, ICUC, Miraikan, Cy-berDoll, computation.
G. J. Mart´ınez: Departamento de Ciencias e Ingenier´ıa de la Com-putaci´on, Laboratorio de Ciencias de la ComCom-putaci´on, Escuela Superior de C´omputo, Instituto Polit´ecnico Nacional, M´exico. & International Center of Unconventional Computing, University of the West of England, Bristol, United Kingdom. & Foundation of Computer Science Laboratory, Hiroshima University, Japan. & Centre for Chaos and Complex Networks, City Uni-versity of Hong Kong, China & Laboratoire de Recherche Scientifique, France. & Institut des Syst`emes Complexes en Normandie, France. Email: genaro.martinez@uwe.ac.uk, URL: http://uncomp.uwe.ac.uk/genaro/
L. N. O. Moreno: Departamento de Ciencias e Ingenier´ıa de la Com-putaci´on, Laboratorio de Ciencias de la ComCom-putaci´on, Escuela Superior de C´omputo, Instituto Polit´ecnico Nacional, M´exico. Email: loliva@ipn.mx, URL: http://www.researchgate.net/profile/Luz Oliva/
Manuscript started November 30, 2012; revised January 15, 2013.
I. LABORATORIO DEROBOTICA DE´ BRISTOL(BRL) Nuestra experiencia comineza en el reconocidoLaboratorio de Sistemas Aut´onomos Inteligentes (IAS).1 Ubicado en la Universidad del Oeste de Inglaterra,2 en la ciudad de Bristol, Inglaterra, en el Reino Unido en el a˜no del 2006. Gracias a una visita financiada por la Royal Society de Inglaterra, a trav´es del profesor Andrew Adamatzky.
Hist´oricamente el puerto de Bristol ha tenido un desarrollo tecnol´ogico importante en Inglaterra, Gales y dem´as partes de la isla. En la segunda guerra mundial la ciudad de Bristol fue sometida a intensos bombardeos alemanes porque en el puerto se encontraban varios de los principales talleres que fab-ricaban motores para aviones, barcos, submarinos y tanques. Actualmente, la ciudad se encuentra recuperando mucha de su indentidad hist´orica, recopilando desde los mismos residentes varias memorias y materiales de la ciudad, todo ello, ha dado origen al redise˜no y creaci´on de su reciente museo hist´orico de la ciudad, bautizado como el “M Shed.”3 Gradualmente,
Bristol ha recuperado parte de su desarrollo tecnol´ogico, principalmente en aerona´utica (proyecto Concorde, proyecto Airbus)4, automatizaci´on y rob´otica en general.
Desde el a˜no 2004, IAS fue actualizado en un proyecto colaborativo de mayor impacto y presupuesto no solo para el Reino Unido, sino a nivel europeo y mundial. Este proyecto tuvo como consecuencia la uni´on entre UWE y la Universidad de Bristol (UB), surgiendo de esta manera elLaboratorio de Rob´otica de Bristol(BRL).5Aunque BRL se situa f´ısicamente en el mismo lugar donde fue creado IAS, en el campus Frenchay de UWE.
Desde entonces y, actualmente, el profesor Chris Melhuish (Director de BRL, Fig. 2) ha impulsado diferentes l´ıneas de investigaci´on, que pueden ser encontradas en algunos otros laboratios de rob´otica y que pueden ser estudiados y analizados para llevarlos a cabo en otros lugares. Algunas de las ´areas de desarrollo en BRL son:
• Robots a´ereos,
• Biomimetic y neuro-rob´otica, • Robots m´edicos,
• Robots humanoides,
• Robots ecol´ogicos,
1Intelligent Autonomous Systems Laboratory (IAS). URL: http://www.ias. uwe.ac.uk/
2University of the West of England (UWE). URL: http://www.uwe.ac.uk/ 3M Shed museum, Bristol, UK. URL: http://www.bristol.gov.uk/page/ leisure-and-culture/m-shed
4British Aircraft Corporation. URL: http://en.wikipedia.org/wiki/British Aircraft Corporation
TECHNICAL REPORT DCIC-ESCOM-IPN, JANUARY 2013. —G. J. MART´INEZ / L. N. O. MORENO 2
Fig. 1. P´agina web del Laboratorio de Rob´otica en Bristol (Bristol Robotics Laboratory – BRL) en Inglaterra.
• Visi´on para robots,
• Sistemas rob´oticos de auto-reparaci´on, • Rob´otica blanda,
• Manipulaci´on de robots a trav´es de medios no lineales,
• Verificaci´on y validaci´on para seguridad en robots. Una de las ´areas que han captado la atenci´on alrededor del mundo fue el concepto de “EcoBot”. Consecuentemente, innovadores dise˜nos se est´an desarrollando, desde la imitaci´on de animales o insectos para mejorar el sistema de navegaci´on sin necesidad de “ojos”, porque ellos pueden ser reemplazados por antenas o bigotes, lo que permite que el robot pueda determinar que trayectoria puede seguir dependiendo de su entorno a trav´es de estas t´ecnicas.
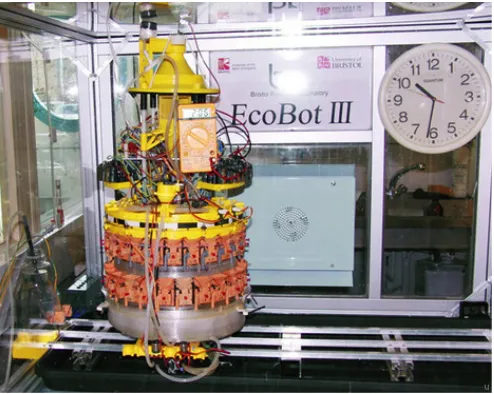
Otro robot de reciente desarrollo ha demostrado ser capaz de ser un ‘potencial’ generador de energ´ıa a trav´es de residuos org´anicos. Presentado por el profesor Ioannis Ieropoulos6
(Fig. 3), a trav´es del uso de desechos org´anicos con el llamado
EcoBot III7 (ver Fig. 4). El prototipo actual es capaz tomar desechos org´anicos procesarlos y generar energ´ıa para su propio funcionamieto. El futuro dasarrollo del EcoBot IV, deber´a encontrar, colectar y procesar desechos org´anicos para producir energ´ıa en otras escalas [6], una alternativa que no
6Ioannis Ieropoulos, p´agina personal: http://people.brl.ac.uk/people/ template.jsp?username=i-ieropo
7EcoBot III. URL: http://www.brl.ac.uk/researchprojects/ energyautonomy-ecobot/ecobotiii.aspx
Fig. 2. Profesor Chris Melhuish. Director del Laboratorio de Rob´otica de Bristol (BRL), Bristol, Inglaterra, 2006.
solo ser´a ´util en la alimentaci´on de energ´ıa para el propio robot sino para otros fines y aplicaciones [5].
[image:2.612.315.562.431.613.2]TECHNICAL REPORT DCIC-ESCOM-IPN, JANUARY 2013. —G. J. MART´INEZ / L. N. O. MORENO 3
Fig. 3. EcoBots desarrollados por el profesor Ioannis Ieropoulos, BRL, Bristol, Inglaterra, 2006.
Fig. 4. EcoBot III, BRL, Bristol, Inglaterra, 2012.
la regi´on, lo cual garantiza parte del ´exito que ha logrado este laboratorio en un corto tiempo.
II. CENTROINTERNACIONAL DECOMPUTACION´
NO-CONVENCIONAL(ICUC)
Una direcci´on innovadora que se ha impulsado en el Cen-tro Internacional de Computaci´on No-Convencional (ICUC),8
es el desarrollo de robots a trav´es del concepto de com-putaci´on no-convencional [11], [12]. El profesor Adamatzky9
(Fig. 5) experto en computaci´on no convencional y sistemas de reacci´on y difusi´on junto con otros colegas de ICUC, desar-rollaron un robot que es manipulado a trav´es de una reacci´on qu´ımica, la conocida reacci´on de Belousov-Zhabotinsky [1], [2], [10]. La reacci´on es procesada en una caja de Petri y una c´amara instalada en el robot visualiza cual es el
8International Center of Unconventional Computing (ICUC). URL: http: //uncomp.uwe.ac.uk.
[image:3.612.52.296.53.239.2]9Andrew Adamatzky, p´agina personal: http://uncomp.uwe.ac.uk/ adamatzky/.
Fig. 5. Profesor Andrew Adamatzky, Director del Centro Internacional de Computaci´on No-Convencional (ICUC), UWE, Bristol, Inglaterra, 2006.
Fig. 6. Robot manipulado a trav´es de la producci´on de reacciones qu´ımicas, ICUC, Bristol, Inglaterra, 2006.
resultado de la reacci´on. El patr´on formado en la caja de Petri determina el sistema de navegaci´on que puede seguir el robot (ver Fig. 6). Actualmente, en ICUC se est´a considerando el procesamiento de la informaci´on de algunos robots a trav´es de chips biol´ogicos.
III. MUSEONACIONAL DECIENCIASEMERGENTES E
INNOVACION´ (MIRAIKAN)
[image:3.612.52.299.278.475.2] [image:3.612.315.561.280.464.2]TECHNICAL REPORT DCIC-ESCOM-IPN, JANUARY 2013. —G. J. MART´INEZ / L. N. O. MORENO 4
Fig. 7. P´agina web del Museo Nacional de Ciencias Emergentes e Inovaci´on (The National Museum of Emerging Science and Innovation – Miraikan) en Jap´on.
Fig. 8. Instituto Nacional de Tecnolog´ıa y Ciencia Industrial Avanzada (AIST), Odaiba, Tokio Waterfront, Jap´on, 2010.
dedicada al desarrollo e investigaci´on de robots en diferentes ´areas.
[image:4.612.52.298.436.622.2]En Odaiba se encuentra tambi´en el famoso Instituto Na-cional de Tecnolog´ıa y Ciencia Industrial Avanzada (AIST) (ver Fig. 8). Uno de los principales institutos en Jap´on para el desarrollo espec´ıfico de humanoides.
Fig. 9. Robot reaccionando a emociones a trav´es del tono de voz en el museo de Miraikan, Odaiba, Tokio, Jap´on, 2010. (Experimento realizado por la profesora Adriana de la Paz S´anchez Moreno, ESCOM-IPN).
[image:4.612.316.559.437.624.2]TECHNICAL REPORT DCIC-ESCOM-IPN, JANUARY 2013. —G. J. MART´INEZ / L. N. O. MORENO 5
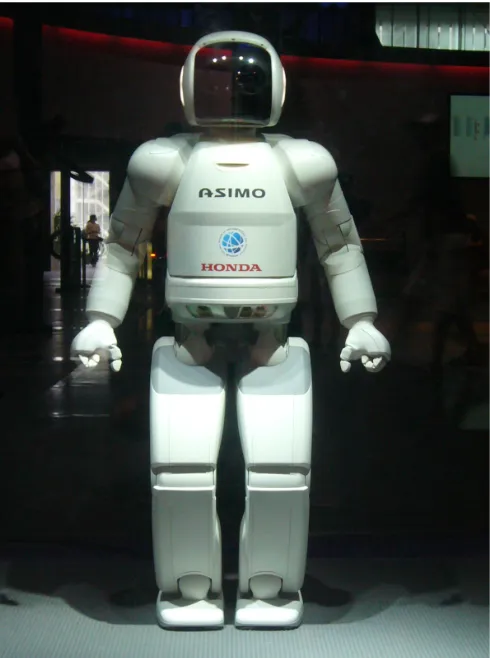
[image:5.612.316.561.52.384.2]Fig. 10. Robot ‘Asimo’ en el museo de Miraikan, Odaiba, Tokio, Jap´on, 2010.
Fig. 11. Robot ara˜na en el museo de Miraikan, Odaiba, Tokio, Jap´on, 2010.
comportamiento sincronizado y homog´eneo. Pero si el tono de voz el fuerte y agresivo entonces los robots tienen un comportamiento inestable y ca´otico. De esta manera, tratan de simular el comportamiento humano a trav´es de los patrones generados por las ondas sonoras.
La Fig. 10 ilustra al celebre robot humanoide ASIMO.10
[image:5.612.52.298.423.607.2]10ASIMO. URL: http://asimo.honda.com/.
Fig. 12. Robots en la medicina, museo de Miraikan, Odaiba, Tokio, Jap´on, 2010.
Fig. 13. Robtots en la neurociencia en el museo de Miraikan, Odaiba, Tokio, Jap´on, 2010.
[image:5.612.313.563.424.610.2]TECHNICAL REPORT DCIC-ESCOM-IPN, JANUARY 2013. —G. J. MART´INEZ / L. N. O. MORENO 6
reconocimiento simult´aneo de voces (varias personas hablando al mismo tiempo), ejecuci´on de tareas dom´esticas precisas, mayor mobilidad y autonom´ıa, interacci´on simult´anea entre varios ASIMOs, entre otras funciones.11
En la pasada d´ecada se han construido una diversidad de robots, algunos de ellos imitando las “formas” de animales o insectos, todo ello con el prop´osito de resolver alg´un problema en particular o sacar ventaja de estos dise˜nos naturales. En la Fig. 11 podemos ver un robot inspirado en forma de ara˜na, una de sus principales ventajas es la facilidad con la que puede moverse en diferentes superficies que, por lo general, no sean homog´eneas, blandas o espesas.
[image:6.612.52.297.341.527.2]Otra direcci´on cada vez m´as importante y con una gran proyecci´on econ´omica, es la construcci´on de robots en la medicina. Particularmente, el desarrollo de brazos aut´onomos capaces de realizar algunas tareas espec´ıficas y con una gran exactitud en operaciones reales. La Fig. 12 ilustra pre-cisamente un ejemplo de ello; adem´as, cabe mencionar el desarrollo de nano-robots que sean capaces de ser introducidos en el cuerpo humano y a trav´es de un sistema de navegaci´on, entonces poder realizar las tareas a esa escala. Este es consid-erado uno de los proyectos con mayor impacto y desarrollo en la presente d´ecada, por la revista cient´ıfica NewScience.12
Fig. 14. Educaci´on sobre robots en el museo de Miraikan, Odaiba, Tokio, Jap´on, 2010.
En nuestra visita a Miraikan adem´as encontramos una escena que nos pareci´o muy interesante. Un aspecto del plan educativo que se cultiva en Jap´on en esta ´area y en general en todo su sistema educativo. La educaci´on a temprana edad, en la Fig. 14 podemos apreciar una clase impartida por un profesor adulto a ni˜nos y adolecentes. En nuestra sociedad hay varias razones por lo que ´esto es muy dif´ıcil de encontrar, obviamente desde limitaciones econ´omicas y de recursos tanto materiales como humanos, aspectos culturales, profesores expertos (investigadores seguramente con doctor-ado) que apoyen esta actividad como una aut´entica vocaci´on y
11ASIMO versi´on 2012. Sitio en japon´es: http://www.honda.co.jp/ASIMO/ about/technology2011/
12Which emerging technology will make the biggest impact between now and 2020? http://ieet.org/index.php/IEET/more/treder20110401.
compromiso a j´ovenes estudiantes y no movidos por “puntos” o alg´un tipo de obligaci´on que fomenta precisamente una mala educaci´on. Obtener de los profesores un inter´es real de continuar en proyectos con resultados que se ver´an solo a trav´es de los a˜nos, y no al vapor o de manera superficial. Por otra parte, concentrar alumnos que sean bien formados y estimulados en un proyecto de este tipo, apoyados por las mismas universidades, institutos o centros educativos y, por supuesto, el apoyo familiar; que los padres no teman a que sus hijos sean educados de esa forma si el joven estudiante muestra habilidades a temprana edad en estas ´areas y cuenten con alg´un tipo de apoyo econ´omico para garantizar su dedicaci´on. Sin duda alguna un problema que es complicado de resolver desde varias instancias y el cual ha sido, lamentablemente, una constante por muchas d´ecadas en nuestra sociedad, soportado por un mal´ısimo sistema educativo con el que contamos a nivel nacional.
IV. PROYECTOCYBER-DOLL
El tercer an´alisis viene con un caso particular el cual nos llam´o poderosamente la atenci´on. El caso de la artista francesa France Cadet, l´ıder y fundadora del proyecto “Cyber-Doll” en Francia.13 Motivada inicialmente por el abuso de animales
por parte del ser humano y experimentos cient´ıficos con un fuerte debate de ´etica y potenciales riesgos, tal como la clonaci´on de animales. Posteriormente, France encontr´o en los robots una fuente de expresi´on e inspiraci´on importante y complementaria, cuestionando adem´as la interacci´on humano-animal-m´aquina.
Fig. 15. Proyecto ‘Cyber-Doll’ dirigido por la profesora France Cadet, BRL, Bristol, Inglaterra, 2007.
Una vez interesada en los robots, France enfoca su inter´es en el robot canino “i-Cybie” desarrollado por Silverlit Toys Manufactory Ltd Hong Kong.14 Un aspecto interesante es que France es una artista y por lo tanto no tiene una formaci´on profesional en ingenier´ıa, electr´onica o computaci´on. En ese
13Cyber-Doll. URL: http://www.cyber-doll.com/.
[image:6.612.313.562.423.608.2]TECHNICAL REPORT DCIC-ESCOM-IPN, JANUARY 2013. —G. J. MART´INEZ / L. N. O. MORENO 7
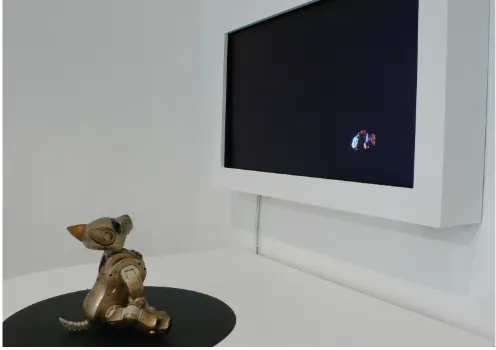
[image:7.612.317.561.53.444.2]Fig. 16. ¿Un gato robot sue˜na con un pez digital?
Fig. 17. ¿Un gato robot sue˜na con un pez digital?
sentido, el inter´es que ella tiene por presentar sus ideas a trav´es de los robots hace que estudie y se especialice en este robot, en su arquitectura, l´ogica, electr´onica, programaci´on y obviamente su dise˜no. Apayoda en ese conocimiento (a trav´es de ingenieros y expertos en rob´otica), sus ideas fueron plasmadas a trav´es de la programaci´on en el perro robot. Por otra parte, su habilidad art´ıstica ayud´o a manipular y presentar de una manera m´as adecuada su dise˜no para ‘mutar’ el perro robot como gato o vaca [3]. France ha logrado establecer resultados que han logrado un impacto importante de reconocimiento internacional alrededor del mundo gracias a estas ideas.
Uno de ellos es un cuestionamiento que logr´o plasmar al modificar este robot para representar la apariencia de un gato y programarlo para que emitiera adem´as los maullidos. Desde trabajos anteriores, France ya contaba con la programaci´on relacionada a la movilidad del robot, sin embargo, en este experimento tuvo que programar la rutina para que el robot pudiera distinguir un objeto desde una pantalla, que en este caso se trata de un pez digital. Entonces plantea el siguiente cuestionamiento: ¿Un gato robot podr´ıa so˜nar con un pez
Fig. 18. ¿Un gato robot sue˜na con un pez digital?
digital?15
La Fig. 16, 17, 18 illustran como se presenta el gato robot ante un televisor, que a su vez proyecta la animaci´on de un pez acompa˜nado de sonido en el agua. El gato robot puede detectar el pez digital en la pantalla y seguir sus movimien-tos, acompa˜nados de maullidos espor´adicos o aleatorios. El experimento quiz´as puede resultar no tan complicado en su programaci´on, pero sin duda, ´este en un buen ejemplo donde una buena idea tiene m´as impacto que otros elementos que uno podr´ıa cuestionar. El elemento importante y cuestionable aqu´ı es la percepci´on que se genera al ver a un gato robot comportarse de esa manera al momento de ver un pez (adem´as digital). ¿Qu´e tipo de mundo ser´ıa ´este? Sin lugar a dudas, la investigaci´on y trabajo art´ıstico-robotizado que ha desarrollado France, la han llevado a presentar sus resultados a diferentes instituciones de prestigio alrededor del mundo, conformar un grupo de trabajo e investigaci´on a trav´es de varios a˜nos y dar cursos de rob´otica en universidades francesas actualmente.
Uno de los problemas que podemos encontrar com´unmente
15Do robotic cats dream of electric fish? http://76.74.242.190/∼cyber786/
[image:7.612.50.298.276.451.2]TECHNICAL REPORT DCIC-ESCOM-IPN, JANUARY 2013. —G. J. MART´INEZ / L. N. O. MORENO 8
en M´exico, es que no se desarrollan proyectos a largo plazo, debido a la falta de apoyo a proyectos en v´ıas de desarrollo con ideas originales y potencial alcance. Adem´as se necesita, creer m´as en la calidad de los estudiantes e investigadores j´ovenes.
V. ¿ROBOTICA EN´ M ´EXICO?
Actualmente no es una tarea sencilla encontrar laboratorios, centros o instituciones dedicadas a la investigaci´on y el desar-rollo de la rob´otica en M´exico. ¿C´omo podemos hablar de un desarrollo de la rob´otica en el pa´ıs? Si ni siquiera contamos con centros educativos ni con grupos de trabajo especializados en esta ´area.
En t´erminos de redes acad´emicas a nivel nacional, pode-mos mencionar algunos recientes esfuerzos como la Red de Modelos Matem´aticos y Computacionales del Conacyt, y que actualmente cuenta con una divisi´on de “C´omputo y Rob´otica”,16 laRed de Expertos en Rob´otica y Mecatr´onica17
del Instituto Polit´ecnico Nacional (IPN)18 integrada por 94
investigadores de 13 unidades acad´emicas del IPN y algunas instituciones como el Instituto Nacional de Astrof´ısica, ´Optica y Electr´onica,19la Universidad Nacional Aut´onoma de M´exico (UNAM),20y el Centro de Investigaci´on y de Estudios Avan-zados del Instituto Polit´ecnico Nacional (CINVESTAV).21 En donde el desarrollo de la rob´otica es poco y est´a limitada a la investigaci´on b´asica en ´areas como la computaci´on, la mec´anica, la electr´onica y el control; adem´as de que general-mente tienen poca interacci´on entre las diferentes ´areas y no se mantiene una continuidad del trabajo. Otro factor que no ha contribuido al desarrollo de la rob´otica en M´exico, es el poco inter´es y la falta de visi´on en la vinculaci´on industria– academia y, sin embargo, en M´exico los componentes o sistemas de la rob´otica que son utilizados por la academia y la industria generalmente son de importaci´on pagados a costos elevados.
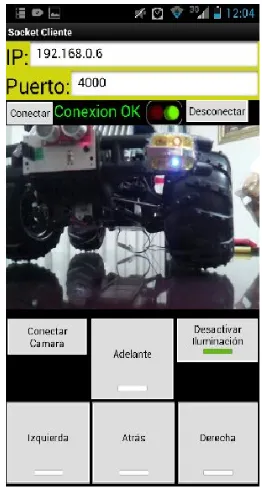
La rob´otica se clasifica seg´un su arquitectura en: poliartic-ulados, de tipo m´ovil, androides, zoom´orficos e h´ıbridos. Las arquitecturas que son m´as utilizadas en M´exico son las de tipo m´ovil por su baja complejidad y costos con respecto a otras arquitecturas. En la Escuela Superior de C´omputo22 se realizan esfuerzos para lograr algunas implementaciones. El prototipo que se muestra en la Fig. 19, es un m´ovil que puede ser controlado por un tel´efono celular, una tableta electr´onica o cualquier otro dispositivo m´ovil, utilizando una conexi´on inal´ambrica (WiFi), tambi´en puede ser controlado mediante una conexi´on v´ıa internet y un punto de acceso inal´ambrico. Para el desarrollo del prototipo se implement´o las etapas de electr´onica de potencia, la comunicaci´on inal´ambrica y el software para el control, todo esto sobre un chasis comercial.
16http://www.rmmc.com.mx/RMMC/ 17http://www.ccs.ipn.mx/COM-153-2012.pdf
18Instituto Polit´ecnico Nacional (IPN). URL: http://www.ipn.mx/. 19http://3c.inaoep.mx/grupos/robotica.php
20http://golem.iimas.unam.mx/home.php?lang=es&sec=home. 21http://www.gdl.cinvestav.mx.
22Escuela Superior de C´omputo (ESCOM). URL: http://www.escom.ipn. mx/.
Fig. 19. Algunos proyectos desde ESCOM-IPN desarrollados por el profesor Luz No´e Oliva Moreno, en la foto, acompa˜nado con uno de sus estudiantes Octavio S´anchez Garc´ıa y un robot m´ovil.
Fig. 20. Robot m´ovil en ESCOM-IPN y su sistema de navegaci´on contralado desde un tel´efono celular.
A trav´es de la aplicaci´on en el tel´efono se puede controlar la velocidad y direcci´on del m´ovil, ´este cuenta con sensores de proximidad en la parte frontal y posterior para evitar que se impacte con alg´un obst´aculo, adem´as cuenta con una c´amara IP que permite la visualizaci´on en la parte frontal del m´ovil. Las siguientes fases de desarrollo contemplan el incluir en el m´ovil una etapa de procesamiento de im´agenes en tiempo real mediante una c´amara cuyo funcionamiento estar´a dedicado solo a procesamiento de las im´agenes mediante un FPGA y la posterior optimizaci´on y desarrollo de su arquitectura.
[image:8.612.315.562.51.239.2] [image:8.612.371.502.287.531.2]TECHNICAL REPORT DCIC-ESCOM-IPN, JANUARY 2013. —G. J. MART´INEZ / L. N. O. MORENO 9
del desarrollo de productos did´acticos como el mindstorms
de Lego.23 En el ´ambito nacional tenemos la organizaci´on de
eventos de entretenimiento como el deRoboshow24y la guerra de robots,25 que aunque no representan ning´un desarrollo
cient´ıfico de la rob´otica, al menos se intenta estimular alg´un tipo de inter´es en los estudiantes. Por lo que para lograr el ´exito de consolidar laboratorios completamente dedicados a la investigaci´on y el desarrollo de la rob´otica en M´exico se deber´a tener el inter´es en aprender a trabajar conjuntamente con diferentes ´areas de conocimiento e insistir en la creaci´on de la vinculaci´on industria y academia.
Generalmente ´este es un problema que indudablamente no es f´acil de resolver. Por ejemplo, recordando algunos hechos de desarrollo tecnol´ogico en nuestro pa´ıs, en M´exico se pudieron haber desarrollado tecnolog´ıas realmente de van-guardia, pero que lamentablemente se perdieron. Hace aproxi-mandamente entre 20 y 25 a˜nos atr´as se desarrollaron ‘compi-ladores’ en la UNAM y en el IPN, originalmente desarrollados y programados por el profesor Harold V. McIntosh [4].26 Estos compiladores (REC, Convert) fueron reconocidos como una contribuci´on en el conocimiento de las ciencias de la computaci´on, citados incluso en el celebre libro “Computation: Finite and Infinite Machines” de Marvin Minsky [8]. Pero lamentablemente se perdio ese desarrollo que pudo haber pro-gresado a otro nivel desde M´exico y solo pudo aprovecharse en algunos investigadores, algunas tesis y algunos art´ıculos.
A pesar de todo, creemos que existen algunos caminos donde se podr´ıa recuperar cierto camino, considerando y tomando la experiencia de otras ´areas.
Sin duda, el estudio e inter´es en los robots ha crecido de manera no solo acad´emicamente, sino que ha logrado un impacto importante en la industria y ahora como un gran negocio. No es de extra˜narse que el desarrollo de los robots se ha visto fuertemente vinculado al desarrollo de la computaci´on y la electr´onica misma. De esta manera, varios a˜nos atr´as era imposible pensar en proyectos de rob´otica en universidades, centros de investigaci´on o instituciones con escasos recursos econ´omicos y humanos en pa´ıses en v´ıas de desarrollo. Sin embargo, en la actualidad la industria de los robots ha evolu-cionado y lejos de tratar de pensar en grandes, complicados, complejos y muy caros robots; el desarrollo de los mini robots ha venido a revolucionar esta ´area. Actualmente, existe un gran auge por los mini robots que eventualmente son m´as econ´omicos en su adquisici´on y en su construcci´on.
Por supuesto dependiendo del tipo de robot que se quiera adquirir o desarrollar, los precios se incrementan considerable-mente. En este sentido, creemos que el desarrollo de los mini robots puede ser un camino con ciertas ventajas.
1) En el aspecto econ´omico no ser´ıa tan complicada la adquisici´on de robots (sencillos) o refacciones.
2) La aplicaci´on de los mini robots gradualmente se est´a abriendo en varias ´areas.
3) La programaci´on de estos mini robots se realiza gen-eralmente en languajes de programaci´on de alto nivel.
23http://mindstorms.lego.com/en-us/Default.aspx.
24http://www.roboshowmexico.com.mx/ y http://fischertechnik.mx/. 25http://sb.ieeeupiita.org/guerraderobots.html#!home/mainPage.
26Harold V. McIntosh. P´agina web: http://delta.cs.cinvestav.mx/∼mcintosh/.
4) El desarrollo gradual de un mini robot nos llevar´ıa por consecuencia a la implementaci´on de robots m´as grandes y m´as complejos.
VI. ALGUNOS SITIOSUTILES EN INTERNET´
Algunos sitios de inter´es desde M´exico.
• Mexican Robotics Federation. http://femexrobotica.org/.
• Tienda en M´exico que vende partes, sensores,
refac-ciones, etc. http://www.robot-mexico.com/.
• FANUC Robotics M´exico. Intelligent robot solutions.
http://www.fanucrobotics.com.mx/. Otros sitios de inter´es en general.
• ASIMO, Japan, http://world.honda.com/ASIMO/. • EMIEW, Japan, http://www.hitachi.com/rd/research/
robotics/emiew1 01.html.
• QRIO, Japan, http://www.sonyaibo.net/aboutqrio.htm.
• HOAP, Japan, http://pr.fujitsu.com/jp/news/2001/09/10. html.
• Robo-Q, Japan, http://www.wretch.cc/blog/tonyjessica/ 10616552.
• Pyuuun, Japan, http://robot.watch.impress.co.jp/cda/ news/2009/03/02/1642.html.
• NAO robot, France. http://www.aldebaran-robotics.com/ en/.
• Cyber Doll, France. http://www.cyber-doll.com/. • LEGO Mindstorms, Dansk. http://mindstorms.lego.com/
en-us/Default.aspx.
• Cyber Robotics Technology Limited, Hong Kong. http:
//www.robotics.com.hk/.
• Robot Zone, Hong Kong. http://www.robotzone.com.hk/.
• Robotics Project, Hong Kong. http://www.robot-hk.com/.
• i-Cybie, Hong Kong. http://web.archive.org/web/ 20070819040621/http://www.i-cybie.com/.
• Robotics Society of Singapore. http://www.robotics.sg/ society/.
• ABB in Singapore. http://www.abb.com.sg/product/us/ 9AAC910011.aspx.
• HongQin Sdn Bhd, Malaysia. http://www.robotclub.com. my/.
• Kuka Robot Automation Sdn., Malaysia. http://www.
kuka-robotics.com/malaysia/en/
• CR8 |R Creative Robotix Learning Center, Malaysia.
http://www.creativerobotics.com.my/.
• Chef Cui, China. http://english.cntv.cn/program/ cultureexpress/20120818/101611.shtml.
• Handy Board, USA. http://www.handyboard.com/. VII. CONCLUSIONES
TECHNICAL REPORT DCIC-ESCOM-IPN, JANUARY 2013. —G. J. MART´INEZ / L. N. O. MORENO 10
de la rob´otica en M´exico en la actualidad y un an´alisis con respecto a otros centros en otros pa´ıses, discutiendo finalmente un posible camino para ver desde otro enfoque un posible desarrollo de robots a bajo costo y pr´acticos.
VIII. AGRADECIMIENTOS
Agradecemos las contribuciones fotogr´aficas de France Cadet (fotos del gato robot 16, 17, 18) y la autorizaci´on de las fotografias personales de los profesores Melhuish, Adamatzky, Cadet e Ieropoulos. El resto del material fotogr´afico corre-sponden a Adriana de la Paz S. Moreno y Genaro J. Mart´ınez. Cualquier error u omisi´on en el art´ıculo es responsabilidad exclusiva de los autores.
REFERENCIAS
[1] A. Adamatzky, P. Arena, A. Basile, R. Carmona-Galan, B. Costello, L. Fortuna, M. Frasca & A. Rodriguez-Vazquez (2004) Reaction-diffusion navigation robot control: from chemical to VLSI analogic processors,
IEEE Transactions on Circuits and Systems: Circuits and Systems I51(5) 926–938.
[2] A. Adamatzky, B. Costello, C. Melhuish & N. Ratcliffe (2003) Ex-perimental Reaction–Diffusion Chemical Processors for Robot Path Planning,Journal of Intelligent and Robotic Systems37(3)233–249. [3] F. Cadet (2012) Mechanical Animals, Antennae: Animal Influence21
54–56.
[4] G. Cisneros (1991) La computaci´on en M´exico y la influencia de H. V. McIntosh en su desarrollo, http://delta.cs.cinvestav.mx/∼mcintosh/
cellularautomata/OTHER TOPICS.html.
[5] J. Hsu (2012) Human Waste-Powered Robots May Be Future of Ma-chines, Scientific American, http://www.scientificamerican.com/article. cfm?id=human-waste-powered-robot.
[6] I. Ieropoulos, J. Greenman & C. Melhuish (2012) Urine utilisation by microbial fuel cells; energy fuel for the future,Phys. Chem. Chem. Phys.
14(1)94–98. DOI: 10.1039/C1CP23213D.
[7] W. Knight (2013) Robots Aren’t Coming for Our Jobs, Just Yet,
MIT Technology Review, http://www.technologyreview.com/view/ 509571/robots-arent-coming-for-our-jobs-just-yet/?utm campaign= newsletters&utm source=newsletter-daily-all&utm medium= email&utm content=20130107.
[8] M. Minsky (1967)Computation: Finite and Infinite Machines, Prentice-Hall.
[9] A. Regaldado (2013) Small Factories Give Baxter the Robot a Cautious Once-Over, MIT Technology Review, http://www.technologyreview.com/news/509296/ small-factories-give-baxter-the-robot-a-cautious-once-over/?utm campaign=newsletters&utm source=newsletter-daily-all&utm medium=email&utm content=20130116.
[10] S. Skachek, A. Adamatzky & C. Melhuish (2005) Manipulating objects by discrete excitable media coupled with contact-less actuator array: Open-loop case,Chaos, Solitons & Fractals26(5)1377–1389. [11] T. Toffoli (1998) Non-Conventional Computers,Encyclopedia of
Electri-cal and Electronics Engineering(John Webster Ed.)14455–471, Wiley & Sons.