ABSTRACT
LI, RUI. Machine Learning Methods for Uncertainty Estimation and Decision-making. (Under the direction of Howard Bondell and Brian Reich).
Machine learning has become widely used in many applications, due to its model
flexibility and robustness. In this thesis, we study and develop three different machine
learning methods that can be used in uncertainty estimation and decision-making.
In Chapter 1, we develop a nonparametric variable selection procedure to select for
variables that impact clinical treatment decisions. Variable selection research has largely
focused on selecting variables that are important for prediction, and less attention has
been paid to identifying variables that are important for decision making. Our approach
is based on a hypothesis testing view applied to the regret function of different models.
We demonstrate the use of this approach as an example using Gaussian process
regres-sion together with backward elimination. The performance of our method is evaluated in
simulation studies and an application with AIDS Clinical Trial Group Study.
In Chapter 2, we develop a model agnostic framework to estimate the conditional
dis-tribution of a response variable given a set of predictor variables. Our approach transforms
a conditional distribution estimation problem into a constrained multi-class
classifica-tion problem, in which tools such as deep neural networks can be utilized. We propose a
novel joint binary cross-entropy loss function to accomplish this goal. We demonstrate
its performance in various simulation studies comparing to state-of-the-art competing
methods. Additionally, our method shows improved accuracy in a probabilistic solar energy
forecasting problem.
In Chapter 3, we utilize the function approximation property of neural network models
to directly estimate the conditional cumulative distribution function, and thus achieve
and monotonic constraints to ensure the estimated distribution function is valid. We also
reduce computation burden by an adaptive training algorithm. We evaluate the proposed
method and show superior performance compared to other flexible models for
condi-tional distribution estimation. We also demonstrate the usefulness of our model in the
© Copyright 2019 by Rui Li
Machine Learning Methods for Uncertainty Estimation and Decision-making
by Rui Li
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Statistics
Raleigh, North Carolina
2019
APPROVED BY:
DEDICATION
BIOGRAPHY
The author grew up in a beautiful city in China named Chong Qing. After high school,
he was admitted to the Hong Kong University of Science and Technology, and received
bachelor degree in biochemistry. He then pursued biomedical research for four years in
UT Southwestern Medical Center in Dallas, Texas. After he found his enthusiasm in data
analytics, he enrolled in the statistics PhD program in NC State University in 2014. Under
the guidance and direction of Dr. Brian Reich and Dr. Howard Bondell, he will complete his
ACKNOWLEDGEMENTS
First of all, I would like to express my great gratitude to both of my PhD advisors, Dr.
Brian Reich and Dr. Howard Bondell. I learned a lot from them about how to conduct
good statistical research. They guided me by examples and their dedication and passion
about research will impact me beyond my PhD career. I also appreciate their patience and
support for my personal growth and career development throughout my PhD journey. The
continuous mentoring and encouragement has been a big driving force for me to grow and
become better every day. It is my fortune to be their student.
I would also like to thank my committee members: Dr. Wenbin Lu, Dr. Arnab Maity
and Dr. Kevin Flores. I really appreciate the time and effort they put in as my committee
member and the suggestions for my PhD projects.
I also owe my gratitude to the faculty members, staffs and fellow students in this
won-derful department. I’ve learnt a lot from all the courses that were taught by the faculties. I
also want to thank all who served as the graduate program directors: Dr. Wenbin Lu, Dr.
Donald Martin, Dr. Howard Bondell and Dr. Kimberly Weems for always being there to
provide suggestions. I appreciate the computing environment that Terry Byron and Chris
Waddell have set up and maintained. I also want to say thanks to Alison McCoy and Lanakila
Alexander for their help throughout my PhD life. I am fortunate to meet many great
class-mates and friends in the past few years and I always appreciate the support I get and the
bond we build.
My appreciation also goes to my colleagues during my graduate industrial training with
SAS. Especially, I would like to thank my managers Alex Chien and Michael Leonard, who
gave me the opportunity to learn, research and develop good analytical softwares.
Last but not least, I want to thank my beloved parents. They have always supported me,
the part few years, but throughout my life. I deeply appreciate the love I get from them, and
TABLE OF CONTENTS
List of Tables. . . viii
List of Figures. . . ix
Chapter 1 Nonparametric Variable Selection for Optimal Treatment Decisions . 1 1.1 Introduction . . . 1
1.2 Treatment Decision and Variable Value . . . 4
1.2.1 Optimal Treatment Decision . . . 4
1.2.2 Value and Regret . . . 5
1.3 Backward Selection for Sufficient Covariates Subset . . . 7
1.3.1 Desirable Properties for Response Surface Modeling . . . 7
1.3.2 Backward Selection Procedure . . . 8
1.3.3 Hypothesis Testing for the Regret . . . 9
1.4 Gaussian Process Model for Treatment Response . . . 12
1.4.1 Gaussian Process Model . . . 12
1.4.2 Computational Details . . . 14
1.4.3 Response Surface Estimation . . . 15
1.4.4 Approximated Distribution of the Response Surface . . . 16
1.4.5 Approximated Parameter Re-estimation for Backward Selection . . . 17
1.5 Simulation Study . . . 18
1.6 Application to the ACTG175 Trial . . . 22
1.7 Discussion . . . 30
Chapter 2 Deep Distribution Regression . . . 31
2.1 Introduction . . . 31
2.2 Distribution Estimation by Partitioning . . . 34
2.2.1 Probability Estimation for Each Partitioned Bin . . . 35
2.2.2 Distribution Estimation with Ensemble Random Partitioning . . . 38
2.3 Density Estimation Consistency . . . 39
2.4 Simulation Study . . . 41
2.5 Application to the GEFCOM2014 Dataset . . . 45
2.6 Discussion . . . 48
Chapter 3 A Flexible Monotonic Neural Network for Conditional Distribution Regression . . . 50
3.1 Introduction . . . 50
3.2 Monotonic Neural Network Model for a Conditional CDF . . . 53
3.3 Computation . . . 58
3.3.1 Loss Functions . . . 58
3.4 Adaptive Sampling forν . . . 60
3.5 Simulation Studies . . . 62
3.6 Electricity Load Demand Analysis . . . 67
3.7 Discussion . . . 71
References . . . 72
APPENDICES . . . 79
Appendix A Supplementary Material for Chapter 2 . . . 80
LIST OF TABLES
Table 1.1 Mean (standard error) of treatment effect at 96 weeks (ratio of 96-week
and baseline CD4 cell count) for the ACTG175 study . . . 23
Table 1.2 Variables selected for each treatment by the Gaussian process regres-sion model . . . 24
Table 1.3 Variables with qualitative interactions . . . 25
Table 1.4 Percent value increase comparing to zidovudine+zalcitabine . . . 29
Table 3.1 Range Ratio of Different Simulation Scenarios . . . 66
Table 3.2 CRPS reduction compare to competing models . . . 68
LIST OF FIGURES
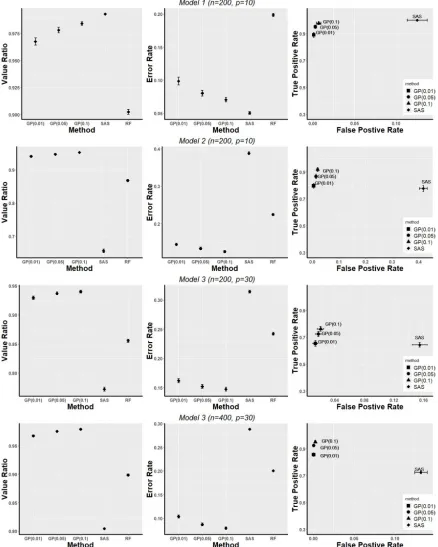
Figure 1.1 Simulation Results . . . 21
Figure 1.2 Marginal Covariates-Treatment Interaction Plot . . . 27
Figure 1.3 Conditional Covariates-Treatment Interaction Plot . . . 27
Figure 1.4 Decision tree approximation to the optimal treatment policy from Gaussian process (π=0.1) . . . 28
Figure 2.1 Model Comparison in Simulations . . . 44
Figure 2.2 Model Comparison with the Solar Energy Generation Datasets . . . . 46
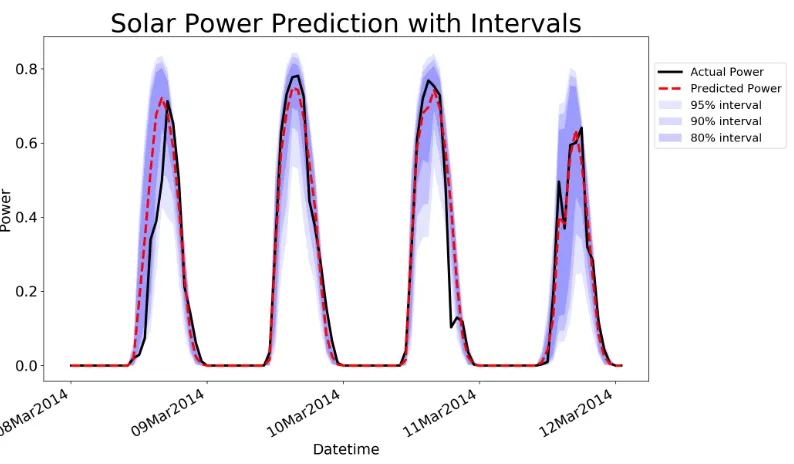
Figure 2.3 Solar Power Prediction with Intervals . . . 47
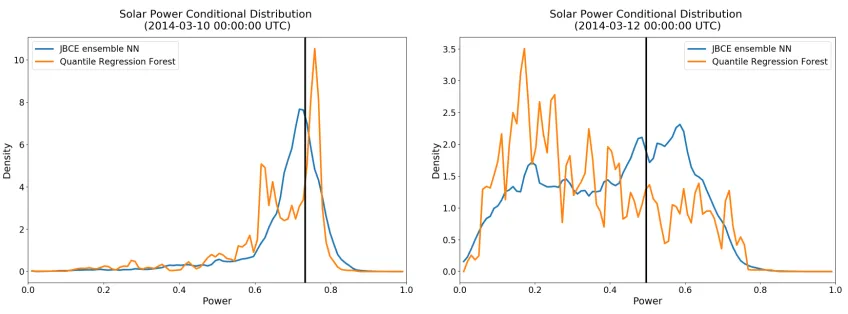
Figure 2.4 Solar Power Conditional Density . . . 48
Figure 3.1 Structures of Monotonic Guaranteed Neural Network . . . 58
Figure 3.2 Prediction Performance Comparison . . . 65
Figure 3.3 CRPS score change with fixed and adaptive sampling ofν . . . 66
Figure 3.4 Exploration of the electricity load dataset . . . 68
Figure 3.5 Prediction intervals for three different methods . . . 70
Figure B.1 Prediction Performance Comparison in AQTL (compared with QRF) 85 Figure B.2 Prediction Performance Comparison in CRPS (compared with DDR) 86 Figure B.3 Prediction Performance Comparison in AQTL (compared with DDR) 87 Figure B.4 AQTL score change with fixed and adaptive sampling ofν . . . 88
CHAPTER
1
NONPARAMETRIC VARIABLE SELECTION
FOR OPTIMAL TREATMENT DECISIONS
1.1
Introduction
Clinical trials are typically performed on a heterogeneous group of patients. Although the
goal of the trial is generally to assess the treatment effect over the entire population of
interest, sub-populations that respond differently to the treatment can exist. For many
treatments, often only a small proportion of the population will obtain the desired benefits,
heterogeneity can come from many sources, including patients’ diverse pharmacogenetic
backgrounds, medical histories, disease states and basic demographic information. Some
sources with known impact on the outcome can be taken into account in the design of
the trial, such as stratifying patients based on their gender and age[Kernan et al. (1999)].
However, the impact of many other characteristics are often unknown, or some
charac-teristics have not been measured, which results in diverse responses across the patients
within treatment groups. Understanding the sources of heterogeneity and being able to
characterize subgroups with different responses to the treatment is crucial in clinical
prac-tice, especially when alternative treatments are available. The advancement in genome
sequencing and the increased adoption of electronic health record system facilitate the
collection and maintenance of individual patient’s information, and provide an
opportu-nity for subgroup identification and characterization through statistical methods[Jensen
et al. (2012)]. This will allow for better prescription schemes and ultimately leads to the
maximization of treatment benefit at the individual level.
There are two related areas in the research of subgroup identification and
characteriza-tion in clinical trials. One of the areas is on the identificacharacteriza-tion of subgroups and proposing
treatment regimes that maximize the benefit for each subgroup[Song and Pepe (2004),
Bonetti and Gelber (2004), Kuk et al. (2010), Foster et al. (2011), Cai et al. (2011), Zhao et al.
(2013), Shen and He (2015) and Fan et al. (2017)]. Another area is on the identification
and selection of patients’ characteristics that are useful in subgroup identification. The
desired characteristics are those that not only interact with the treatment, but also have an
impact on the ordering of treatments. This type of interaction is often referred asqualitative
interaction, as opposed toquantitative interactionwhere patients’ characteristics interact
the identification and selection of qualitative interactions become crucial. Finding a subset
of baseline covariates that qualitatively interact with treatments can simplify the process of
subgroup identification. It can also reduce the cost of collecting and storing all the baseline
covariates from patients.
Our study is motivated by the AIDS Clinical Trials Group Study 175 (ACTG175)[Hammer
et al. (1996)]. The ACTG175 study was a randomized, double-blind, placebo-controlled trial
designed to compare the efficacy between monotherapies with zidovudine or didanosine
with combination therapies with zidovudine and didanosine or zidovudine and zalcitabine
in HIV-infected subjects. The main original finding is that the combination therapies are
su-perior to the monotherapy with zidovudine alone. It also appears that the two combination
therapies have very similar overall treatment responses at 96 weeks, measured by percent
change in CD4 cell count. It is not clear whether there exist subgroups in the population
that will benefit differently from the two combination therapies, and if such subgroups
exist, what are the covariates required to identify them. We aim to address these questions
and design a treatment policy to maximize the benefit to the patients.
Few methods have been proposed specifically to address variable selection problems in
treatment assignment decision making. Gunter et al. (2011) suggested a measure for
quali-tative interaction ranking, the S-score, and used it to rank and select subsets of covariates.
They then used forward selection and Average Gain Value (AGV) to select the final model.
Fan et al. (2016) pointed out that since this S-score measures the qualitative interaction for
each covariate marginally, it does not take into account the correlation among covariates.
Thus they proposed the Sequential Advantage Selection method (SAS), and used a BIC-type
criterion to select the best subset. Both methods assume that the relationship between the
covariates that have qualitative interaction and the treatment responses are linear.
In this article, we propose a general procedure for selecting subsets of covariates that
qualita-tive interactions of individual variables with the treatment, we adopt the regret function
introduced by Murphy (2003) to evaluate the optimal treatment policies from different
models with different subsets of covariates. Additionally, we develop a hypothesis test
based approach as our selection criterion, by approximating the distribution of the regret
function given the model. The advantage of our procedure is its compatibility with a variety
of models that can be used to model the treatment responses. In this research, we use
the Gaussian process as an example to model the response surface and demonstrate the
usefulness of our procedure. The choice of flexible models like Gaussian process can also
alleviate the limitations from linear model based approaches proposed by Gunter et al.
(2011) and Fan et al. (2016).
The remainder of this article is organized as follows: Section 1.2 introduces the optimal
treatment decision framework and the regret function. Section 1.3 details the selection
procedure and the criterion to choose the model. Section 1.4 describes the Gaussian process
model and estimation of the optimal treatment policy. Section 1.5 shows the comparison
between the SAS approach proposed by Fan et al. (2016) and our method in a simulation
study. Section 1.6 conducts the analysis on the ACTG175 dataset using our approach. Finally,
a discussion is given in Section 1.7.
1.2
Treatment Decision and Variable Value
1.2.1
Optimal Treatment Decision
In this article, we focus our attention on the scenario where every clinical trial patient
is subjected to one of the two treatments denotedA = 0 and A =1. Let Y ∈ Rdenote
health records, etc. The optimal treatment decision for the patient is a function of their
covariates:
a?(X) =arg max a
E[Y|X,A=a]. (1.1)
We also denote the value of the optimal policy asV?, which is the population average
response if the treatments are assigned based on the optimal treatment policy,
V?=
Z
E[Y|X,A=a?(X)]g(X)dX, (1.2)
whereg(X)denotes the covariates’ density function.
1.2.2
Value and Regret
Obtaining the optimal treatment decision specified in (1.1) requires allp covariates being
collected and the high-dimensional response functionE(Y|X,A)being estimated. Our goal is to remove covariates that play a negligible role in treatment decision assignment, and
keep the variables that have an impact on the optimal treatment decisions. For a subset of
variablesXM ={Xj :j ∈ M }, whereM ⊆ {1, 2, . . . ,p}, letaM∗ (X) =arg max a
E[Y|XM,A= a]be the optimal policy among the class of policies that use only the information from
covariatesXM. We denoteVM as its value,
VM =
Z
E[Y|X,A=aM∗ (X)]g(X)dX. (1.3)
VM is the population average (over allp covariates) of expected response assuming
treat-ments are assigned following the treatment policya∗
M(X). Note that the expectation is still
for the decision rule. To determine the consequences of using the policya∗
M(X), rather
thana?(X), we denote the regretRM as the regret function[Murphy (2003)]taking value at
a∗ M(X):
RM =V?−VM. (1.4)
Instead of measuring how mucha∗
M(X)differs froma?(X), the regretRM measures the
magnitude of change in the expected outcome due to those treatment decision mistakes.
LargeRM values would indicate thatXM is missing some important covariates that may
affect the optimal treatment decision and the treatment mistakes caused by the absence of
those covariates’ information may have significant impact on overall treatment outcome.
In a broad sense, the regret can be used to evaluate any pair of nested models, if we
defineR12=VM1−VM2, givenM2⊆ M1. By formulating a hypothesis test ofR12=0, we can determine whether the covariate subsetM2contains sufficient information for decision making with respect to M1. In our specific application, we are always comparing the selected subsetM with the complete set of covariates, and determining whetherRM =0. In order to examine through the various subsets of covariates, we can utilize forward, backward
or any other step-wise selection procedures, and any procedure would include five general
steps:
1. Model the response surfaceE(Y|X,A)for each treatment as a function of allp base-line covariatesX(full model). Modeling the treatment effects separately allows for a
hypothesis testing procedure we developed in Section 1.3.3.
(a∗ M(X)).
4. EvaluateVM,V?andRM through numerical integration.
5. Determine whetherRM =0.
In Section 1.3 we will describe our variable selection procedure and a hypothesis test based
stopping criterion in detail, given we can model the response surface. In Section 1.4, We
demonstrate the use of Gaussian processes to model the response function and obtaining
a?(X)anda∗ M(X).
1.3
Backward Selection for Sufficient Covariates Subset
1.3.1
Desirable Properties for Response Surface Modeling
As mentioned in Section 1.2.2, the first step in the selection for the sufficient covariates
subset is to model the response surface under each treatment condition. Various regression
models can be used for this purpose, while the following properties are often desirable:
1. Models with intrinsic variable selection ability. Some collected covariates in clinical
trials may not contribute to treatment response in any treatment condition. It is
beneficial to perform a global screening to exclude non-relevant covariates.
2. Models that allow statistical inference for the estimated response surface. This will
allow us to estimate the sampling distribution of the difference surface between
treatment responses, or contrast function (Zhang et al. (2012)), and thus conduct
hypothesis test, forRM =0.
3. Models that are flexible enough for non-linear contrast functions. This will alleviate
In Section 1.4, we will discuss the use of Gaussian processes for modeling the response
surface.
1.3.2
Backward Selection Procedure
As discussed in Section 1.2.2, the regret is defined by the value difference between the
optimal treatment decision and the treatment decision based on the reduced set of
covari-ates. Thus backward selection will be directly evaluating the regret of removing a subset of
covariates. Following is the backward selection procedure:
1. For each treatment condition, we fit a regression model with all covariates. This is
denoted as "complete" modelMc o m p l e t e={1, 2, . . . ,p}.
2. For models that have intrinsic variable selection ability, we perform a screening step
to remove the variables that are irrelevant for the response in all treatment conditions.
3. Re-fitting the model for each treatment with the remaining variables. We denote this
as the "full" modelMf u l l ⊆ Mc o m p l e t e.
4. We evaluate the treatment response surface at locations drawn from the joint
distri-bution of X. The joint distridistri-bution of X can be estimated separately or we can simply
use the observed data points. We then determine the difference in treatment effect
(contrast function values) at those locations and corresponding optimal treatment
assignment.
5. Repeat step 3 and 4 with "reduced" models which we constructed based on a backward
(b) At stepm≥1, the models to be considered are denoted asMj(m)=M(
m−1)\ {j},
for everyj ∈ M(m−1). (c) Estimate the regret ˆRM(m)
j as an estimate ofRM (m)
j by plugging into (1.4). Remove
the variable j with the minimum estimated regret at this step. The minimum
estimated regret at stepm is denoted as ˆRM(m).
(d) Derive or simulate the sampling distribution of ˆRM(m)at stepm≥1, and test for
the null hypothesisRM(m)=0.
(e) Repeat (b) to (d), untilRM(m)=0 is rejected.
1.3.3
Hypothesis Testing for the Regret
As mentioned in Section 1.3.2, we propose a stopping criterion based on a test for the null
hypothesisH0:RM(m)=0 versus the alternative hypothesisHa:RM(m)>0 at each stepm≥1. We first describe the derivation of the approximated sampling distribution forRM under
H0for any subsetM and then the p-value for hypothesis test.
Let f(X) be the response function that we are trying to estimate. ˆf (X, ˆθ) denotes
an estimate for the response function, whereθcan be estimable parameters associated
with a non-parametric model, such as coefficients in regression splines or the
length-scale parameters in Gaussian process. If we assume ˆθhas asymptotic Gaussian sampling
distribution, and there exists someµθ andΩθ such thatpn(θˆ−µθ) N(0,Ωθ), whereµθ is the asymptotic mean andΩθ is the asymptotic covariance, then the asymptotic conditional
distribution of ˆf (X, ˆθ)|X =x would be Gaussian based on delta method, and can be denoted as ˆf(X, ˆθ)|X=x∼N[µf(x),σ2f(x)].
To determine the optimal treatment assignment, we need to obtain ˆf0(X, ˆθ0) and
ˆ
f1(X, ˆθ1)which are the estimates of the response functions for treatmentA=0 andA=1
our estimated optimal treatment assignment will be determined by the estimated contrast
function. For instance, if ˆC(X, ˆθ0, ˆθ1)<0, it means that patients with covariatesXare esti-mated to have larger response value (better response) in treatment 0 than treatment 1 and
we will assign the patient to treatment 0; otherwise, we will assign the patient to the
alter-native treatment 1. More formally, we have the policy as: ˆa?(X, ˆθ0, ˆθ1) =I[Cˆ(X, ˆθ0, ˆθ1)≥0]. We could similarly obtain ˆa∗
M(X, ˆθM0, ˆθM1)for the reduced modelM, where ˆθM0and ˆθM1 are the estimated parameters of the reduced models for each treatment response surface
respectively.
Because we modeled the response surface for each treatment separately, we assume that
ˆ
f0(X, ˆθ0)|X=x
⊥⊥
fˆ1(X, ˆθ1)|X=x. We then derive the asymptotic conditional distributionof ˆC(X, ˆθ0, ˆθ1)|X=xas: ˆ
C(X, ˆθ0, ˆθ1)|X=x∼N[µf1(x)−µf0(x),σ
2
f1(x) +σ
2
f0(x)], (1.5)
whereµf0(x)andµf1(x)are the asymptotic means of ˆf0(X, ˆθ0)|X=xand ˆf1(X, ˆθ1)|X=x,
whileσ2
f0(x)andσ
2
f1(x)are the corresponding asymptotic variances. Similarly, we can obtain the conditional distribution for the contrast function denoted ˆCM(X, ˆθM0, ˆθM1)as in the
reduced modelM.
The sampling distribution of regretRM in (1.4) is induced by the sampling distributions
of the optimal treatment decisions ˆa?(X, ˆθ0, ˆθ1)and ˆaM∗ (X, ˆθM0, ˆθM1)and their
correspond-ing contrast functions ˆC(X, ˆθ0, ˆθ1)and ˆCM(X, ˆθM0, ˆθM1). Under the null hypothesisRM=
0, it means that∀Xn in the covariate spaceX,RM(Xn) =I[a?(Xn)6=a∗
M(Xn)]· |C(Xn)|=0. In another word, it means that whenever there is a difference in the outcome for
sub-alent toC(Xn)·CM(Xn)≥0, ifCM(Xn)6=0. For the boundary case, whereCM(Xn) =0, under the null hypothesis, we assume the assignment based on the reduced model is
same as the assignment based on the full model. In practice, the conditional distribution
ˆ
CM(X, ˆθ0, ˆθ1)|X is a continuous distribution, where the event ˆCM(Xn, ˆθ0, ˆθ1) = 0 has 0 probability. To satisfy the condition under the null hypothesis based on our model
specifi-cation, and assume the models of choice for the contrast functions are consistent, we will
need to have:
E[Cˆ(X, ˆθ0, ˆθ1)|X]·E[CˆM(X, ˆθM0, ˆθM1)|X]≥0. (1.6) For computational convenience, we assume ˆC(X, ˆθ0, ˆθ1)and ˆa?(X, ˆθ0, ˆθ1)are fixed
quan-tity estimated from the full model, and ˆCM(X, ˆθM0, ˆθM1) is random. In order to
gener-ate empirical samples of ˆCM(X, ˆθM0, ˆθM1)from its sampling distribution under the null
which meets the criterion in (1.6), for every instanceXn in the covariate spaceX such
thatE[CˆM(X, ˆθM0, ˆθM1)|X=Xn]·E[Cˆ(X, ˆθ0, ˆθ1)|X=Xn]<0, we adjustE[CˆM(X, ˆθM0, ˆ
θM1)|X=Xn] =0, while keeping the variance of ˆCM(X, ˆθM0, ˆθM1)|Xunchanged.
Thus under the null hypothesisH0, for every instanceXn, we takeS=10, 000 samples from the adjusted distribution of ˆCMH0(X, ˆθM0, ˆθM1)|X=Xn, and subsequently obtain the samples of ˆa∗
MH0(X, ˆθM0, ˆθM1)|X=Xn. Withst h sample from the distribution of ˆa
∗ MH0(X,
ˆ
θM0, ˆθM1)|X=Xn, we can calculate the corresponding sample of regret atXn, ˆR( s) MH0(Xn) as:
ˆ
RM(s)H
0(Xn) = ˆ
EY[Y|Xn,A=aˆ?(s)(Xn, ˆθ0, ˆθ1)]− (1.7)
ˆ
EY[Y|Xn,A=aˆ∗( s)
space as:
ˆ
RM(s)H
0 = 1
N
N
X
n=1
ˆ
RM(s)H
0(Xn), (1.9)
whereN is the number ofXnevaluated in the covariate space. The samples of ˆRMH0
repre-sent its empirical distribution underH0. The proportion of samples that are larger than the
estimated ˆRMfor modelMis taken as our estimated p-value. More formally, it is calculated as:
ˆ
pM = 1
S
S
X
s=1
I[RˆM(s)H
0 > ˆ
RM]. (1.10)
The proportion ˆpM is the estimated p-value for testing the null hypothesisH0:RM =0 versus the alternative hypothesisHa:RM >0 for modelM.
To adjust for multiple comparisons in each step of selection, we apply Bonferroni
correction. If total oft models are considered at stepm≥1, then the Bonferroni corrected p-value is:tpˆM(m).
1.4
Gaussian Process Model for Treatment Response
1.4.1
Gaussian Process Model
The optimal treatment policy will depend on the difference between the two treatment
response functions. We model the response for each treatment separately, and then combine
the results to obtain the policy. Unlike Gunter et al. (2011) and Fan et al. (2016), we use
(2006)]to model each treatment response. As described in Section 1.3.1 and 1.3.3, statistical
inferences on the parameters and estimated response surface are crucial. To achieve such
purpose, we take the Bayesian approach for the parameter estimation, as the uncertainty
quantifications on the parameters are easier to obtain from posterior distributions than
from maximum likelihood based approaches. The Gaussian process model is specified as:
Y =f(X) +ε, (1.11)
wheref(X)is the response surface, andεis the white noise error with distributionN(0,τ2).
The response surface has a GP prior with mean parameterµand covariance function:
Cov[f(Xi),f(Xm)] =δ2K(Xi,Xm) =δ2 p
Y
j=1
exp
−(xi j−xm j)
2
2`2
j
. (1.12)
The function K(Xi,Xm) gives the prior correlation between f(Xi) and f (Xm), while δ2 is the signal variance and`
j is the length-scale parameter for dimension j. A repa-rameterization fromδ2 andτ2 to the overall varianceσ2 =δ2+τ2and the signal-ratio
γ=δ2/(δ2+τ2)allows for a conjugate prior onσ2. Priors forµ,σ2andγare then specified
asµ∼N(0,σ2
µ), σ2∼inverse-gamma(a,b)andγ∼U(0, 1). For simulation studies and real data application in Section 1.5 and Section 1.6, the priors are specified withσµ=100,a =0.1 andb =0.1.
We also add an initial variable screening step to remove the variables that are not
important for the response in either treatment conditions. To do so, we adopt the approach
presented by Linkletter et al. (2006), which is inspired by the Stochastic Search Variable
Selection (SSVS) method of George and McCulloch (1993) to enable the variable selection
for the GP. Linkletter et al. (2006) suggested a reparameterization from `j > 0 to ρj = exp(−1/2`2
Therefore to perform variable screening we use the SSVS prior:
ρj =1−UjPj, Uj ∼U(0, 1), Pj ∼B e r n(p0). (1.13)
This prior specification meansρj has probability 1−p0to be exactly 1, which is equivalent
toXj being removed from the model.p0=0.5 was used in simulation studies and the real
data analysis. We use the posterior probability thatXj is included in the model,P(ρj <1|Y), to screen for globally irrelevant covariates.
1.4.2
Computational Details
We apply MCMC separately for each treatment group, and thus omit the treatment indicator
A from this section. We perform MCMC marginally over the treatment response surface
f(X), so thatY = (Y1,Y2, . . . ,Yn)T has likelihoodY ∼N(µ1,σ2Σ), whereΣ=γK(X,X) + (1−γ)I. The mean and variance parametersµandσ2have closed form full conditional posteriors and thus we use Gibbs sampling and update them as following:
µ|X,Y,σ2,ρ1, . . . ,ρp,γ ∼ N(µˆ, ˆσ2) (1.14) σ2
The corresponding parameters of the conditional posteriors are:
ˆ
µ= 1
TΣ−1Y
1TΣ−11+σ2 σ2 µ
ˆ σ2=1
TΣ−11
σ2 +
1 σ2
µ
ˆ
a =a+n
2
ˆ
b =b +(µ1−Y)
TΣ−1(µ1
−Y)
2
Forγ andρj,∀j ∈ {1, 2, . . . ,p}, there are no closed form conditional posteriors and we update them using the Metropolis–Hastings algorithm proposed by Savitsky et al. (2011).
For the initial covariates screening step, we run MCMC for 2500 iteration with 500 burn-in
samples. We fit the Gaussian process again for each treatment with the remaining variables
with 6000 MCMC iterations and 1000 burn-in samples.
1.4.3
Response Surface Estimation
For a new patient with covariatesX∗, the new expected response f(X∗)and the
observa-tions have joint distribution:
f(X∗)
Y
∼N
µ1, σ2
γK(X∗,X∗) γK(X∗,X)
γK(X,X∗) γK(X,X) + (1−γ)I
(1.16)
We denoteΩ11=σ2γK(X∗,X∗),Ω
12=ΩT21=σ
2γK(X∗,X)andΩ
22=σ2[γK(X,X)+(1−γ)I].
Thus the expected response atX∗is estimated by:
ˆ
As a function of X∗, ˆf(X∗) is the treatment response surface for determining the
opti-mal treatment policy. The predicted value ˆf(X∗) depends on hyperparameters µ, σ2,
ρ= (ρ1,ρ2, . . . ,ρp)T, andγ. To account for parameter uncertainty, we can compute the average prediction over the hyperparameters’ posterior distribution. However, to simplify
computation, we instead plug in their posterior means, since at this stage, we are only
interested in the point prediction.
1.4.4
Approximated Distribution of the Response Surface
As mentioned in Section 1.3.2 and 1.3.3, our stopping criterion in the backward selection is
based on the hypothesis test ofRM =0, where the sampling distribution of ˆRM will depend
on the sampling distribution of the response surface ˆf(X∗).
We denote all the parameters in our Gaussian process model asθ= (µ,σ,ρ1, . . . ,ρp,γ)T, and assume they approximately follows multivariate Gaussian distribution:θ∼N(µθ,Ωθ), whereµθ is the posterior mean andΩθ is the posterior covariance. By delta method, the
asymptotic distribution of ˆf(X∗, ˆθ)would be Gaussian with following specifications:
ˆ
f(X∗, ˆθ)∼N[µf(X∗),σ2f(X
∗)] (1.18)
whereµf(X∗) =Eθ[fˆ(X∗,θ)] = Eθ[µ1+Ω12Ω22−1(Y −µ1)], as stated in (1.17) and can be
estimated by plugging in the posterior means ofθ.σ2
f(X
method:
ˆ σ2
f(X
∗) =[∂fˆ(X∗, ˆθ)
∂θ ]
T
b
Ωθ[
∂fˆ(X∗, ˆθ)
∂θ ] (1.19)
∂ fˆ(X∗, ˆθ)
∂θ =
∂µˆ1
∂θ +
∂Ωb12
∂θ Ωb
−1
22(Y −µˆ1)+
b
Ω12
∂Ωb
−1 22
∂θ (Y −µˆ1)−
∂µˆ1
∂θ Ωb
−1 22Ωb
T
12 (1.20)
∂Ωb
−1 22
∂θ =−Ωb
−1 22
∂Ωb22
∂θ Ωb
−1
22 (1.21)
With the approximated distribution of the response surface, we could follow the steps
in Section 1.3.3 to conduct the hypothesis test ofRM =0.
1.4.5
Approximated Parameter Re-estimation for Backward Selection
The estimation of the regretRM requires the estimation of the response surfaces of both
full and reduced models. We could refit the Gaussian process each time when a covariate is
removed during backward selection to obtain the reduced models, if computation capacity
allows. Note that each of these models is fitted separately, so it is fully parallelizable directly.
Alternatively, we also proposed an approximation method for parameter re-estimation.
Based on our model parameterization in Section 1.4.1,ρj =1 means covariatesXj is not included in the model. We setρj =1,∀j ∈M¯={j ∈ {1, 2, . . . ,p}|j ∈ M }/ . We also fix the total varianceσ2at the posterior mean from full model ˆσ2
f u l l, as we assume it does not change dramatically with different subsets of covariates included in the model. Denote
θM ={µ,γ}∪{ρk},∀k∈ M, andθM¯ ={σ}∪{ρj},∀j ∈M¯. We can re-estimate the posterior distribution ofθM using the conditional Gaussian distributionθM|θM¯, and then compute
1.5
Simulation Study
We performed a simulation study to compare our method with the SAS approach[Fan et al.
(2016)]and study sensitivities to the tuning parameters in the backward selection
proce-dures. Additionally, we also included the non-linear random forest method to model the
responses for each treatment based on input covariates, and recommended the treatment
policy based on the predicted treatment response for each treatment. The random forest
approach does not involve the selection of sufficient subset of covariates. We consider
the following three models to generate both linear and non-linear contrast functions with
different number of observations (n) and variables (p). In all cases, treatmentA=1 orA=0
is randomly assigned to each observation with probability 0.5. The covariates are Gaussian
with mean 0 and covariancec o v(Xi,Xi+d) =0.7d. The white noise error for the response is ε∼N(0, 1). We consider these response surfaces:
Model 1:
f(X,A) =1+2X1−2X2+{0.1+2X1−1.8X9+1.6X10}A
Model 2:
f(X,A) =1+2X1−2X2+{2−0.5∗(1+|X1|)2+2 cos(2X9)+
3 sin(2X10)}A
Model 3:
All the treatment-covariates interaction terms are designed to be influential on the direction
of treatment effects, based on the different values the covariates will take. The underlying
interactions are linear in Model 1 and non-linear in model 2. Both models havep =10
covariates. Model 3 has both linear and non-linear interactions and also more covariates
(p=30).
The performance of each method is evaluated by following quantities:
1. Value Ratio (VR): VR is defined as following:
V R=
R
a?(X)=aˆM∗ (X)|C(X)|g(X)dX
R
|C(X)|g(X)dX . (1.22)
C(X)is the contrast function:C(X) = f(X,A =1)−f(X,A =0). Larger VR indi-cates improved responses following the policy proposed by the selected model. VR is
estimated through numerical integration by evaluatinga?(X), ˆaM∗ (X)andC(X)at
10, 000 points randomly drawn from joint distribution ofX, and calculated as:
V R=
P
|C(X)|I(a?(X) =aˆ∗ M(X))
P
|C(X)| . (1.23)
2. Error Rate (ER): Error rate is defined as the misassignment rate:
E R=
Z
a?(Xn)6=aˆ∗ M(Xn)
g(X)dX. (1.24)
ER is also calculated from the 10, 000 points randomly drawn from the covariate space
X as:
E R= 1
10000
10000
X
n=1
I(a?(Xn)6=aˆM∗ (Xn)). (1.25)
interac-tions have been included in the selected model.
4. Selected Variable Set Size (Size): the number of covariates selected in the model.
The performance of the random forest, SAS and our Gaussian process variable selection
procedure (GP) was evaluated against 100 different datasets. For the random forest, default
parameters inRpackage
randomForest
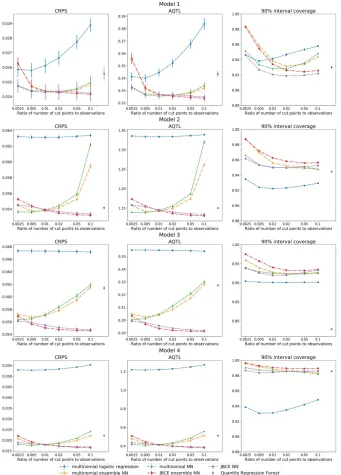
were used. Different p-value cutoffs for ourFigure 1.1: Simulation Results
selec-The simulation results showed that in the presence of non-linear qualitative interaction
(Models 2 and 3), policies derived from our GP backward selection procedure have better
treatment response and less assignment error compared to the SAS method. Also, our
method more often includes true qualitative interactions. The performance in the scenario
with only linear qualitative interaction (Model 1) also achieves good Value Ratio, Error Rate
and True Positive Rate, and only slightly inferior to the SAS method. In all the simulation
cases, our method has better Value Ratio and lower error rate than the random forest
method.
Our method with p-value cutoff atπ=0.1 generally gives an appropriate size close to the true size of important covariates, while forπ <0.1 seems to be conservative in selecting covariates into the model. The size of selected subsets in the SAS method is often greater
than the true size, indicating the inclusion of covariates with no qualitative interaction in
the model.
Increasing the ratiop/n also increases the treatment assignment error rate and de-creases the inclusion rate of true important qualitative interactions in our method. But the
Value Ratio, which reflect the overall quality of the policy, is not significantly affected.
1.6
Application to the ACTG175 Trial
We applied our proposed method to the dataset from AIDS Clinical Trials Group Study
175 (ACTG175). This study was conducted by Hammer et al. (1996) to compare the
treat-ment efficacy of monotherapy with zidovudine, and combination therapies in HIV-infected
adults with CD4 cell counts from 200 to 500 per cubic millimeter. The ACTG175 study was
zi-encing≥50% decline in CD4 cell counts at different time points. For modeling purposes, we used the ratio of the CD4 cell counts at 96 weeks to the CD4 cell counts at baseline as the
measure of treatment effect, and the result for each treatment is summarized in Table 1.1.
This rank of treatments is consistent with original conclusion from Hammer et al. (1996).
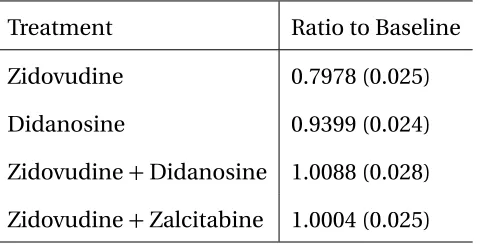
Table 1.1: Mean (standard error) of treatment effect at 96 weeks (ratio of 96-week and baseline CD4 cell count) for the ACTG175 study
Treatment Ratio to Baseline
Zidovudine 0.7978 (0.025)
Didanosine 0.9399 (0.024)
Zidovudine+Didanosine 1.0088 (0.028)
Zidovudine+Zalcitabine 1.0004 (0.025)
After the removal of missing observations, there are total 1104 patients who meet the criteria of baseline CD4 cell counts.
Though both combination therapies have superior treatment effects compared to single
treatments, their overall efficacies are very similar. Thus, the optimal treatment regime
may depend on baseline covariates of patients. In this dataset, there arep =16 baseline
covariates. We used Bayesian Gaussian process variable selection as described in Section
1.4 to model each treatment response and screen out variables that are not important for
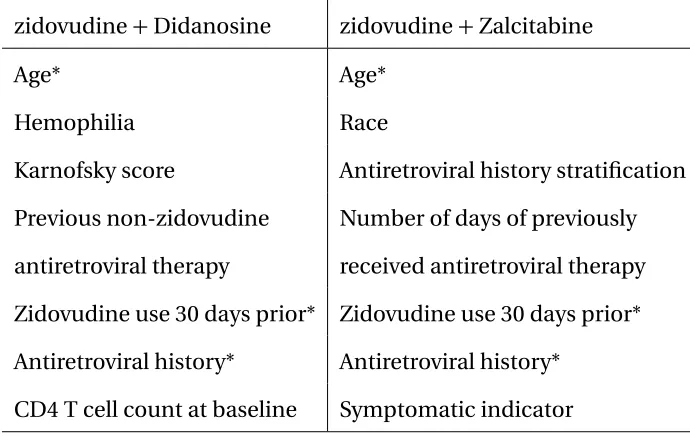
Table 1.2: Variables selected for each treatment by the Gaussian process regression model
zidovudine+Didanosine zidovudine+Zalcitabine
Age* Age*
Hemophilia Race
Karnofsky score Antiretroviral history stratification
Previous non-zidovudine
antiretroviral therapy
Number of days of previously
received antiretroviral therapy
Zidovudine use 30 days prior* Zidovudine use 30 days prior*
Antiretroviral history* Antiretroviral history*
CD4 T cell count at baseline Symptomatic indicator
Shared covariates in each treatment are labeled with *.
The data were then modeled with the covariates in Table 1.2 for each treatment using
GP regression again and we applied the backward selection procedure in Section 1.3 to
select the sufficient covariates subset. All the covariates that are considered in the backward
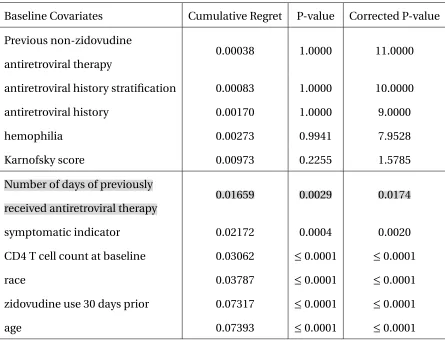
Table 1.3: Variables with qualitative interactions
Baseline Covariates Cumulative Regret P-value Corrected P-value
Previous non-zidovudine
antiretroviral therapy
0.00038 1.0000 11.0000
antiretroviral history stratification 0.00083 1.0000 10.0000
antiretroviral history 0.00170 1.0000 9.0000
hemophilia 0.00273 0.9941 7.9528
Karnofsky score 0.00973 0.2255 1.5785
Number of days of previously
received antiretroviral therapy
0.01659 0.0029 0.0174
symptomatic indicator 0.02172 0.0004 0.0020
CD4 T cell count at baseline 0.03062 ≤0.0001 ≤0.0001
race 0.03787 ≤0.0001 ≤0.0001
zidovudine use 30 days prior 0.07317 ≤0.0001 ≤0.0001
age 0.07393 ≤0.0001 ≤0.0001
Only ’number of days of previously received antiretroviral therapy’ (highlighted in gray) will be excluded from the selected covariates if we use p-value cutoff at 0.01. Since the performance of π=0.01 is less desirable from the simulation experiments, we usedπ=0.1 in this analysis.
The covariates in Table 1.3 are ranked in ascending order of the cumulative regret,
which is also the order of backward elimination, with top of the list being removed first. The
cumulative regret reflects the regret we will have by removing the corresponding covariate
together with all the covariates that have been removed in prior backward selection steps.
The p-value is calculated based on methods in Section 1.4.4 at each step and the Bonferroni
but any threshold greater than 0.0174 would give the same result. All the selected covariates
are listed below the line. In addition to age, which has previously been identified as an
important covariate for treatment assignment[Lu et al. (2013)], we also found several other
variables may be related to the treatment decision. Other than age and race, the selected
covariates are either about baseline health condition, such as CD4 cell count at baseline
and symptomatic indicator, or about previous usage of zidovudine. These information
could be valuable for further biological studies and the design of future clinical trials.
Qualitative interactions between selected covariates and treatment can be visualized in
the interaction plots in Figure 1.2 and Figure 1.3. We examined age and zidovudine usage 30
days prior to treatment in more detail in these interaction plots. Both covariates have effect
in individual treatment responses as indicated in Table 1.2, and have qualitative interactions
as shown in Table 1.3. Fitted response curves are plotted for each covariate in Figure 1.2.
Age and zidovudine usage 30 days prior marginally do not have qualitative interactions
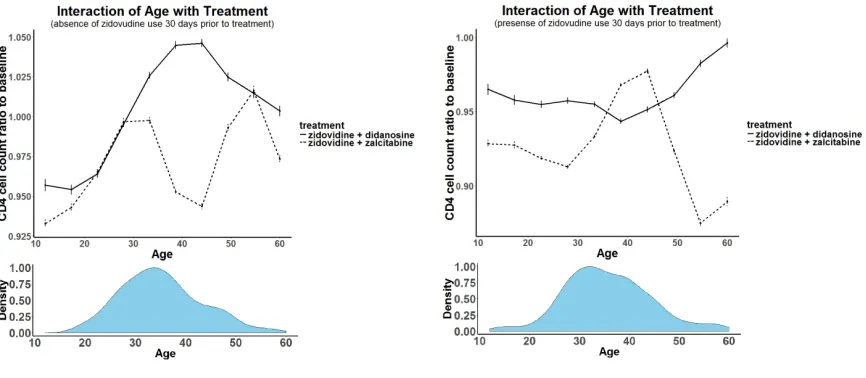
with treatment choices. However, as shown in Figure 1.3, conditional on the presense of
zidovudine usage 30 days prior, age has qualitative interaction with treatment choices.
In the group that is absent of previous zidovudine exposure, zidovudine+didanosine is
the superior treatment across all ages, while in the group that has previous zidovudine
exposure, zidovudine+zalcitabine will benefit patients between age 36 to 46. Just based on
the information from age and prior zidovudine usage, it affects optimal treatment policy
for 33.9% of patients in the group with prior zidovudine usage and 19.8% patients in total.
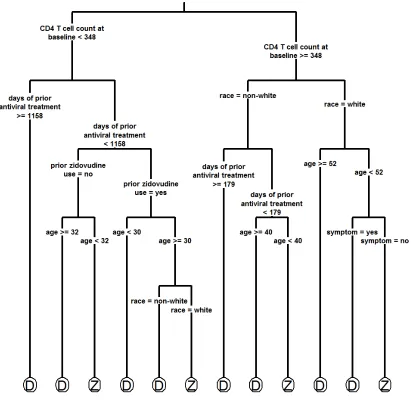
In high dimensions it is challenging to visualize the response surface. To illustrate the
estimated decision rule, we fit a decision tree with the selected covariates to approximate
our recommended treatment policy. More specifically, we fit a decision tree with the selected
Figure 1.2: Marginal Covariates-Treatment Interaction Plot
Treatment response surfaces are predicted based on GP regression for each treatment, and the marginal interaction plots are generated by integrating over other covariates through Monte Carlo integration. Standard error bars are also included.
Figure 1.3: Conditional Covariates-Treatment Interaction Plot
Interaction of age and treatment effects are plotted in subgroups stratified by zidovudine usage 30 days prior to treatment. The age distribution in each group is also provided.
that while the zidovudine+didanosine combination is a slightly better treatment overall, if
a patient is young, has no symptom of disease or has relatively recent antiviral treatment,
then he/she may benefit from zidovudine+zalcitabine.
The biological relevance of selected variables are in general hard to be validated, unless
Figure 1.4: Decision tree approximation to the optimal treatment policy from Gaussian process (π=0.1)
Label D: the combination therapy of zidovudine+didanosine Label Z: the combination therapy of zidovudine+zalcitabine
the usefulness of the selected variables in subgroup identification and proposing optimal
treatment regimes. Thus, we compared the values of the treatment policy from our method
each method. We performed 5-fold cross validations for 10 rounds, and the results are shown
as the percentage of value increase comparing to the slightly inferior treatment: zidovudine
+zalcitabine. Results are summarized in Table 1.4. Following the policy suggested by our
method, we observe an improvement over the policy from SAS method.
Table 1.4: Percent value increase comparing to zidovudine+zalcitabine
Treatment Policy Percent Patients Treated with Z+D Value Increase
All treated with Z+D 100% 0.9
Policy from SAS 51.1% 0.9 (0.5)
Policy from GP* (π=0.1) 50.4% 1.9 (0.4)
Policy from GP* (π=0.05) 50.4% 1.6 (0.4)
SAS: sequential advantage selection. GP: Gaussian process variable selection procedure. Standard error is shown in the parenthesis. Z+Z: zidovudine+zalcitabine. Z+D: zidovudine+didanosine. Value Increase: 100×[(value of treatment policy)/(value of treating with zidovudine+ zalcitabine)-1]
* Selected covariates from Table 1.3 that have qualitative interactions with treatment assignments are used to model the difference of treatment response surfaces and decide the optimal treatment policy.
Although both methods will assign similar proportion of the patients to treatment
zidovudine+zalcitabine, their assignment policy only overlap by 63.7%, which indicates a
significant number of patients will be impacted with different assignment policies.
This case study showed that when two treatment options have very similar overall
bene-fit, it may differ in performance in subpopulations. Being able to construct an interpretable
treatment policy with a handful of selected patient covariates is crucial for clinical practices,
1.7
Discussion
In this paper, we propose a variable selection framework to select for subsets of covariates
that are sufficient for treatment decisions. This approach is based on the analysis of the
regret function of different reduced models. The proposed backward selection is used to
systematically identify the sufficient covariates subset and we design a hypothesis test for
the regret as the stopping criteria in the backward selection procedure. To demonstrate
the usefulness of our procedure, we use Bayesian Gaussian process model to estimate
the response surface for each treatment condition and make inference on the parameters
based on their posterior distributions. The proposed method is flexible to accommodate
non-linear relationship between covariates and treatment effects. The simulation study
shows that when there are non-linear components in the treatment contrast function,
our method outperforms linear model based approach in variable selection and provides
better treatment decision. Our method also selects key covariates that potentially impact
treatment decisions based on the AIDS Clinical Trials Group Study 175, and provides a
visual representation of the optimal treatment policy.
One drawback of our method is the computation time. Our method requires fitting
Gaussian process models for each treatment condition and can be time consuming when
there are multiple treatment groups or the number of patients(n)is large. Future work
could include the approximation techniques[Quinonero-Candela et al. (2007)]in Gaussian
process modeling and allow our method to be applied to larger problems. Alternatively,
other approaches that enjoy the properties in Section 1.3.1 can be used to replace Gaussian
CHAPTER
2
DEEP DISTRIBUTION REGRESSION
2.1
Introduction
In recent years, a variety of machine learning methods, such as random forest, gradient
boosting trees and neural networks have gained popularity and been widely adopted. These
methods are often flexible enough to uncover complex relationships in high-dimensional
data without strong assumptions on the underlying data structure. Off-the-shelf software is
available to put these algorithms into production[Pedregosa et al. (2011), Abadi et al. (2016)
and Paszke et al. (2017)]. However, in regression and forecasting tasks, many of the machine
regard-ing the uncertainty of the target quantity. Understandregard-ing uncertainties are often crucial
in fields such as financial markets and risk analysis[Diebold et al. (1997), Timmermann
(2000)], population and demographic studies[Wilson and Bell (2007)], transportation and
traffic analysis[Zhu and Laptev (2017), Rodrigues and Pereira (2018)]and energy
forecast-ing[Hong et al. (2016)]. In this article, we establish a framework that can directly extend
off-the-shelf machine learning algorithms to provide the full conditional distribution of
the response given the covariates. Instead of estimating specific quantiles[Koenker and
Hallock (2001), Taylor (2000) and Friedman (2001)], or prediction intervals[Khosravi et al.
(2011), Shrestha and Solomatine (2006)], we aim to directly estimate the full conditional
distribution, as other quantities can be directly extracted from it.
This research is motivated by the necessity of probabilistic prediction in energy
fore-casting. The Global Energy Forecasting Competition 2014[Hong et al. (2016)]focused on
probabilistic forecasting, due to the high demand of uncertainty estimation in energy
fore-casting, yet few existing methods are readily available. The solar energy forecasting track in
this competition aimed to estimate the full conditional distribution of solar energy
genera-tion based on covariates such as solar radiance, temperature, time of the day, etc. This is
a crucial task in actual day-to-day operation as solar energy generation is highly weather
dependent and thus volatile. To ensure stability in the electrical grid, grid operation not only
requires accurate point prediction of solar energy generation, but also its volatility based
on weather conditions. Driven by this practical problem, we establish a method to provide
comprehensive information regarding the energy generation uncertainties, by estimating
the full conditional distribution. Our method shows superior estimation accuracy in our
real data analysis compared to competing methods.
the conditional distribution estimate f(Y|X) =f(Y,X)/f(X). This approach is limited by the dimensionality of the input spaceX, due to having to estimate the full joint distribution
ofX. Several methods have then been proposed to address some of the limitations in both
locally parametric and non-parametric ways[Hyndman et al. (1996), Hyndman and Yao
(2002), Holmes et al. (2012), Fan et al. (2009), Izbicki and Lee (2016)]. Another popular
approach is to approximate the distribution of interest by a parametric distribution family
or mixture of such distributions, such as a mixture of Gaussians[Escobar and West (1995),
Song et al. (2004), Rojas et al. (2005), Fahey et al. (2007)]. This approach faces the challenge of
determining the number of mixtures, and the approximation performance will depend on
the complexity of the true underlying distribution. Bootstrap-based aggregation provides
an alternative method, and a good example is quantile regression forest[Meinshausen
(2006)], which obtains the full conditional distribution from the empirical distribution in
the aggregated tree leaves. A boosting approach to this problem was discussed in Schapire
et al. (2002).
Machine learning approaches have experienced major success in classification
prob-lems. We leverage this success to build conditional distribution estimates. In our paper,
we propose a two-stage method for conditional density estimation. In the first stage, we
partition the response space into bins; in the second stage, the probabilities that the target
variableY falls into each bin given the input covariatesX are estimated. In this way, we
transform a conditional density estimation problem into a multi-class classification task,
where we can take advantage of many off-the-shelf machine learning algorithms. This
framework enjoys the model-agnostic property in the second stage, allows for plugging
in any suitable multi-class classification method, such as deep learning for example. To
further accommodate the fact that the classes are ordered, we use a joint binary cross
entropy loss to couple with the neural network model. The design of our neural network
is not guaranteed by other ordinal classification methods as in Frank and Hall (2001) and
Cheng et al. (2008). In addition, we explore random partitioning in the first stage followed
by the ensemble approach to obtain a smoother and more stable density estimator.
The paper is organized as follows: In Section 2.2, we describe the model set up. In Section
2.2.1, we examine approaches and loss functions that can be used in the multi-class
classi-fication stage and in Section 2.2.2 we examine an alternative partition method and model
ensemble. In Section 2.3, we show that given the consistency of the classification model,
we can achieve consistency for the density estimator. We evaluate the model performance
with simulation studies in Section 2.4. In the simulation study, we thoroughly examine the
effect of number of bins, different binning strategies as well as different loss functions. In
Section 2.5, the method is illustrated using the aforementioned solar energy example where
we demonstrate superior performance to quantile random forests. We conclude with the
discussion in Section 2.6.
2.2
Distribution Estimation by Partitioning
Our approach is based on partitioning the range of the response variableY into bins and
approximating the conditional density functionf(y|X)by a piecewise constant function. We also propose ensemble random partitioning which allows for a smooth density. Formally,
assume we are interested in the density ofY in the range of[l,u]. This interval is partitioned
byK cut-pointsl <c1 <c2 <· · ·<cK <u into K +1 bins. Let c0 =l,cK+1=u andTk = [ck−1,ck)denotes thekth bin, fork ∈ {1,· · ·,K +1}.
form:
f(y|X)≈
K+1
X
k=1
πk(X) |Tk|
I(y ∈Tk), (2.1)
where|Tk|=ck−ck−1is the size of the intervalTk.
We then estimateπk(X)with a classification model. Let ˆπk(X)be the estimator for πk(X)obtained from the classification model. Plugging ˆπk(X)into (2.1) gives the density estimator:
ˆ
f(y|X) =
K+1
X
k=1
ˆ πk(X)
|Tk|
I(y ∈Tk). (2.2)
A natural approach to estimateπk(X)is discussed in Section 2.2.1.
2.2.1
Probability Estimation for Each Partitioned Bin
Below we describe two different modeling strategies for the multi-class classification task
of estimatingπk(X).
Multinomial Log-likelihood
A natural approach to obtain the estimates for the conditional probability of a response
observation in each bin is to model the conditional distribution as a multinomial
distribu-tion. We note that this does not take into account the fact that the bins are ordered. We will
discuss how to deal with this fact in the next section. For a given observationXn, where
whereπ(Xn;θ) = [π1(Xn;θ),π2(Xn;θ),· · ·,πK+1(Xn;θ)]is the probability vector describ-ing the conditional probability ofYn belonging to each bin givenXn, andθdenotes the
parameters in the classification model. The log-likelihood function is:
N
X
n=1
logL(θ|Yn,Xn) = N
X
n=1
K+1
X
k=1
I(Yn∈Tk)log[πk(Xn,θ)]. (2.3)
Given an appropriate classification modelπ(X;θ), our goal is to maximize the
log-likelihood function with respect toθ. In this work, we use deep neural networks as a flexible
and robust method. Under this model,θcorresponds to its biases and weights. The softmax
functionσ[z(Xn;θ)]i=ezi/
PK+1
j=1 e
zjwas used as the activation function for the output layer
of the neural network model, wherez(Xn;θ)is the output layer vector prior to the softmax
transformation. The softmax activation function ensures that the estimator ˆπ(Xn;θ)is a
valid probability vector, such that ˆπk(Xn;θ) =σ[z(Xn;θ)]i>0 andPK+1
k=1πˆk(Xn;θ) =1.
Although we choose the neural network model, our framework is model-agnostic, and
any method that is appropriate for multi-class classification can be utilized. This approach
is very straight-forward in practice as many off-the-shelf machine learning tools have
multi-class multi-classification algorithms implemented. However, one potential caveat is that this
approach can be sensitive to the number of cut-pointsK. While largerK is required to
uncover the fine details of the target distribution and reduce bias, it results in increased
variance due to smaller number of observations per partitioned bin. Additionally, this
approach does not take the order of the bins into consideration. In order to address some
Joint Binary Cross Entropy Loss
Instead of utilizing multi-class classification to directly estimate the functionπ(X), we
reframe the problem asK binary classification tasks, and binary classifications are evaluated
at each of the K cut-points. In other words, we will obtain the conditional cumulative
distribution functionF(ck;Xn,θ) =P(Yn≤ck|Xn)by estimatingF(c1;Xn,θ),F(c2;Xn,θ), · · ·,F(cK;Xn,θ)jointly.
In this approach, we retain the model (i.e. neural networks) for the conditional
proba-bility thatYn belongs to each bin givenXn, but specify the loss function in terms of the
cumulative distribution functionF(ck;Xn,θ) =
Pk
m=1πm(Xn;θ). Because the estimates
ˆ
πk(Xn;θ)are positive, we are able to automatically obtain the monotonicity property of
F(ck;Xn,θ). For a given cut-pointck, the binary cross entropy (BCE) loss is:
B C E(ck) =− N
X
n=1
{I(Yn≤ck)log[F(ck;Xn,θ)]
+ [1−I(Yn≤ck)]log[1−F(ck;Xn,θ)]}. (2.4)
Combining the BCEs across allK cut-points gives the joint binary cross entropy (JBCE)
loss:
J B C E =
K
X
k=1
B C E(ck). (2.5)
Our goal becomes minimizing the JBCE loss with respect toθ. This approach takes
the order of the bins into consideration in contrast to multi-class classification where the