Exact tests based upon the difference of two independent binomial proportions are
popularly used and are especially suited for studies with small to moderate sample
sizes. In the context of testing for superiority and noninferiority, we apply the
confi-dence region p-value method (Berger and Boos, 1994) in proposing an exact test that
has been found to perform better than the standard exact test in many situations.
The exact tests use unconditional distributions and the variances of the test statistics
are determined via a restricted maximum likelihood method (Farrington and
Man-ning, 1990). Inverting the tests, we derive corresponding confidence intervals and
we provide coverage probability and expected length comparisons. These
compar-isons show that, in many cases, the confidence intervals based upon the proposed
exact method have less conservative coverage and shorter lengths when compared to
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
STATISTICS
Raleigh
2003
APPROVED BY:
Roger L. Berger William H. Swallow
Chair of Advisory Committee
In December of 1995, at California State University Northridge, he received his
Bachelor of Arts degree in Mathematics with minors in Japanese, Biology, and
Chem-istry. In the summer of 1996 he packed up his belongings into his trusty Honda Accord
and drove 2,560 miles eastbound on I-40 towards Raleigh to begin his graduate studies
in the Department of Statistics at North Carolina State University.
In 1998, Jimmy received his Masters of Statistics degree and in 2003 he completed
his Ph.D. in Statistics at NC State. During his time in the graduate program he was
afforded the opportunity to teach undergraduate courses and the experience affirmed
his life long ambition to enter academics to pursue his professional career. In the fall
of 2003, he will join the faculty of the Department of Statistics at Cal Poly San Luis
Obispo.
been planted with the help of a supporting cast of many, and the work represented
in this manuscript is certainly no exception. My only regret is that I will not be able
to properly express in words the multiple pages of gratitude that each person listed
here surely deserves.
First, I would like to express my sincere appreciation to my advisor Dr. Roger
Berger. I am especially grateful for his incredible patience and understanding. Through
my interactions with him I have learned a great deal not only about research but also
about the academic life and I truly appreciate his steadfast guidance. I would also
like to thank each of the committee members for their valuable input and service.
In terms of the guidance and instruction I have received from the members of the
department, I could not have asked for a better collection of faculty to learn from.
I would like to acknowledge two faculty members in particular: Dr. Sastry Pantula
and Dr. Bill Swallow.
As Director of Graduate Programs for most of my stay, Dr. Pantula has been
an incredible source of support. Whenever I needed to seek guidance, his door was
always open and he was always willing to lend me his ear and offer helpful advice. I am
especially grateful for the manner in which he always “raised the bar of expectation”
and how he always asked for the best of me – I am forever indebted to him for that.
student, I have had the fortune of many successful teaching experiences which I owe,
at least in part, to him. Being the modest person that he is, Dr. Swallow would
probably be first to disagree with the notion that he taught me how to teach, however
I can say without hesitation that he taught me how to teachbetter.
When I had the opportunity to help recruit graduate students to our department,
one aspect I liked to boast about is the warmth and family-like environment we
enjoy. This congenial atmosphere is surely maintained by, among others, our many
kind and friendly departmental staff. I am thankful for all of the staff members and
I am especially grateful for Ms. Janice Gaddy (Mom). With every question I have
had,Mom looked after my concerns and addressed my needs with the utmost level of
care, efficiency, and professionalism. Without a doubt, she will be one of the people
I will miss most from the program.
Another crucial person of our department I need to thank is our systems
adminis-trator Terry Byron. Terry is quite simply the best. He has helped me in more ways
than I can keep track of and, probably, in more ways than he would like toremember.
I have always appreciated the incredible patience he has extended to me. Many times,
even when he was completely swamped with other work, he cheerfully took the time
to go the proverbial ‘extra mile’ with whatever computer related questions I had and
our family and friends”. As I look back upon my experience in the program, I find
this to be quite evident and I can honestly say some of my fondest memories stem
from the relationships I have been blessed with over the years. Although I will not be
able to thank everyone properly, I would like to give special thanks to the many
grad-uate students I have befriended and to those brave enough to endure my Japanese
cooking experiments which occurred in my kitchen.
I am particularly grateful for the following friends: Prasheen Agarwal, Jarrett
Barber, Doug Robinson, Abdus Wahed, Kapil Sen, Pralay Mukhopadhyay, Joshua
Tebbs, Zeynep Kalaylioglu, Ross Gosky, Selene Leon, Julie McIntyre, and Alvin Van
Orden. They have all, in their own special ways, helped to make my graduate school
experience a memorable one.
Now, I would be completely remiss if I failed to mention one particular friend
and officemate, Jared Lunceford. The many classes we had together were much
more enjoyable sitting next to that guy, even when he volunteered me to answer
impossible measure theory questions. I have really appreciated his unique humor,
candor, and counsel. Truly, it has been my honor to call upon him as a friend. I
am especially grateful to have had the opportunity to know his wonderful wife Heidi
and their beautiful children. Looking back on my experience in Raleigh, some of the
integrity. To my mother, I am grateful for the love and wisdom she has imparted
towards me and for being one of my greatest teachers. To my irreplaceable sister
Kathy, I am grateful for her always being there and for the great friendship we enjoy.
To her, I say “Now, it’s your turn girl!”. To my entire family, I especially appreciate
the countless encouragements I have received from them throughout my years in
school. Iro iro taihen osewa ni natte hontou ni arigato gozaimashita!
The Roman statesman Seneca once said “I delight in learning so that I can teach”.
No other statement encapsulates the very motivation which has driven me throughout
my education to reach this point. It has been my lifelong dream to achieve this goal
and now I delight in the wonderful realization that my career in academics is about
to begin.
List of Tables xv
1 Introduction 1
1.1 Model Formulation . . . 3
1.2 The δ Projected Z Statistic . . . 4
1.3 p-value and the Nuisance Parameter Problem . . . 6
1.4 Confidence Region p-value Method . . . 9
2 Comparison of Unconditional Exact Tests for Testing the Difference of Independent Binomial Proportions 12 2.1 Testing for Superiority . . . 13
2.1.1 Introduction . . . 13
2.1.2 Computation Study . . . 14
2.1.3 Examples of Tpr Performance Relative to Tpu . . . 15
2.1.4 Results . . . 19
2.2.3 Example of Tpr Performance Relative to Tpu . . . 42
2.2.4 Results . . . 45
2.2.5 Size Plots for δ0 =−0.10 . . . 59
2.3 Conclusion . . . 63
2.3.1 Superiority Trials . . . 63
2.3.2 Noninferiority Trials . . . 64
3 Comparison of Exact Confidence Intervals for the Difference of Two Binomial Proportions 66 3.1 Introduction . . . 66
3.2 An Efficient Method to Generate (x, y) for Confidence Intervals for δ 68 3.3 Comparison of the Exact Confidence Intervals . . . 76
3.3.1 Coverage Probability . . . 76
3.3.2 Average Length Comparisons . . . 99
3.3.3 Expected Length Comparisons . . . 106
3.3.4 Relative Difference of Expected Length Comparisons . . . 117
3.4 Conclusion . . . 127
Bibliography 129
A.2 Computing a Confidence Interval for δ . . . 135
A.2.1 Case 1: X =x, Y =y . . . 135
A.2.2 Case 2: X =n1 −x, Y =n2−y . . . 138
1.2 (1−β) confidence region for (π1, π2)∈Θ0 . . . 11
2.1 Superiority hypothesis spaces as specified by (2.1.2). . . 14
2.2 (x, y)∈ Rpr,(x, y)6∈ Rpu. . . 17
2.3 (x, y)∈ Rpr, (x, y)6∈ Rpu. . . 19
2.4 Size plots for testingH0 :δ≤0.10 at the α= 1% level. . . 36
2.5 Size plots for testingH0 :δ≤0.10 at the α= 5% level. . . 37
2.6 Size plots for testingH0 :δ≤0.10 at the α= 10% level. . . 38
2.7 Size plots for testingH0 :δ≤0.10 at theα = 1% level where (n1, n2) = (100,100). . . 39
2.8 Size plot for Tpu testing H0 :δ≤0.10 at the α= 1% level. . . 39
2.9 Noninferiority hypothesis spaces as specified by (2.1.2). . . 41
2.10 (x, y)6∈ Rpr, (x, y)∈ Rpu . . . 45
2.11 Size plots for testing H0 :δ≤ −0.10 at the α= 1% level. . . 60
2.12 Size plots for testing H0 :δ≤ −0.10 at the α= 5% level. . . 61
at fixed δ settings. . . 82
3.3 (n1 :n2) = (1 : 1) case. Coverage probability plots forn1 = 50,n2 = 50
at fixed δ settings. . . 83
3.4 (n1 :n2) = (2 : 1) case. Coverage probability plots forn1 = 13, n2 = 7
at fixed δ settings. . . 84
3.5 (n1 :n2) = (2 : 1) case. Coverage probability plots forn1 = 66,n2 = 34
at fixed δ settings. . . 85
3.6 (n1 :n2) = (3 : 1) case. Coverage probability plots forn1 = 15, n2 = 5
at fixed δ settings. . . 86
3.7 (n1 :n2) = (3 : 1) case. Coverage probability plots forn1 = 75,n2 = 25
at fixed δ settings. . . 87
3.8 (n1 :n2) = (1 : 1) case. Coverage probability plots forn1 = 10,n2 = 10
at fixed π2 settings. . . 93
3.9 (n1 :n2) = (1 : 1) case. Coverage probability plots forn1 = 50,n2 = 50
at fixed π2 settings. . . 94
3.10 (n1 :n2) = (2 : 1) case. Coverage probability plots forn1 = 13, n2 = 7
at fixed π2 settings. . . 95
3.13 (n1 :n2) = (3 : 1) case. Coverage probability plots forn1 = 75,n2 = 25
at fixed π2 settings. . . 98
3.14 (n1 :n2) = (1 : 1) case. Expected length plots for n1 = 10, n2 = 10 at
fixedπ2 settings. . . 111
3.15 (n1 :n2) = (1 : 1) case. Expected length plots for n1 = 50, n2 = 50 at
fixedδ settings. . . 112
3.16 (n1 :n2) = (2 : 1) case. Expected length plots for n1 = 13, n2 = 7 at
fixedδ settings. . . 113
3.17 (n1 :n2) = (2 : 1) case. Expected length plots for n1 = 66, n2 = 34 at
fixedδ settings. . . 114
3.18 (n1 :n2) = (3 : 1) case. Expected length plots for n1 = 15, n2 = 5 at
fixedδ settings. . . 115
3.19 (n1 :n2) = (3 : 1) case. Expected length plots for n1 = 75, n2 = 25 at
fixedδ settings. . . 116
3.20 (n1 : n2) = (1 : 1) case. Relative difference of expected lengths
(RDEL) for n1 = 10, n2 = 10 at fixed π2 settings. . . 121
3.21 (n1 : n2) = (1 : 1) case. Relative difference of expected lengths
(RDEL) for n1 = 50, n2 = 50 at fixed π2 settings. . . 122
3.24 (n1 : n2) = (3 : 1) case. Relative difference of expected lengths
(RDEL) for n1 = 15, n2 = 5 at fixed π2 settings. . . 125
3.25 (n1 : n2) = (3 : 1) case. Relative difference of expected lengths
(RDEL) for n1 = 75, n2 = 25 at fixed π2 settings. . . 126
A.1 Confidence region relationship for (X, Y) = (x, y) and (X, Y) = (x0, y0) =
(n1−x, n2−y) . . . 136
2.2 Comparison of rejection regions based on pr and pu for H0 :δ≤0.10. 24
2.3 Comparison of rejection regions based on pr and pu for H0 :δ≤0.20. 25
2.4 Comparison of rejection regions based on pr and pu for H0 :δ≤0.30. 26
2.5 Comparison of rejection regions based on pr and pu for H0 :δ≤0.40. 27
2.6 Comparison of rejection regions based on pr and pu for H0 :δ≤0.50. 28
2.7 Comparison of rejection regions based on pr and pu for H0 :δ≤0.60. 29
2.8 Comparison of rejection regions based on pr and pu for H0 :δ≤0.70. 30
2.9 Comparison of rejection regions based on pr and pu for H0 :δ≤0.80. 31
2.10 Comparison of rejection regions based on pr and pu for H0 :δ≤0.90. 32
2.11 Comparison of rejection regions based on pr and pu for H0 :δ ≤0.10,
complete 1:1 case. . . 33
2.12 Comparison of rejection regions based on pr and pu for H0 :δ≤ −0.10. 49
2.13 Comparison of rejection regions based on pr and pu for H0 :δ≤ −0.20. 50
2.14 Comparison of rejection regions based on pr and pu for H0 :δ≤ −0.30. 51
2.19 Comparison of rejection regions based on pr and pu for H0 :δ≤ −0.80. 56
2.20 Comparison of rejection regions based on pr and pu for H0 :δ≤ −0.90. 57
2.21 Comparison of rejection regions based onpr andpuforH0 :δ≤ −0.10,
complete 1:1 case. . . 58
3.1 Association between (x, y) and (x0, y0) = (n1−x, n2 −y). . . 70
3.2 Index label and sample point associations. . . 72
3.3 Index label associations for (x, y). . . 72
3.4 Quotient-ratio representations of index values compared to index label associations for (x, y) . . . 74
3.5 Average length comparisons for pu versus pr where n1 :n2 = 1:1. . . . 103
3.6 Average length comparisons for pu versus pr where n1 :n2 = 2:1. . . . 104
3.7 Average length comparisons for pu versus pr where n1 :n2 = 3:1. . . . 105
Research for discrete data stemming from clinical trials often relied upon an
asymptotic distribution, as opposed to the true or exact distribution, of the test
statistic of interest. Analyses that rely upon exact distributions usually involve
in-tense computations and so the relatively convenient asymptotic methods offer an
attractive time-saving alternative. Asymptotic methods, by their very nature,
per-form well when sample sizes are large. However, when sample sizes are small to
moderate, as found in many clinical trials, exact methods are preferred. Recently,
exact tests have become popular and more accessible due to the increase in speed and
power of computing resources.
In this work, we will focus upon the analysis of data arising from clinical trials
where the parameter of interest is the difference of two independent binomial
propor-tions. This parameter of interest is often used in the context of testing for superiority
and noninferiority.
that the conditional distribution of the sample, given W =w, is free of the nuisance
parameter. Thus, one can construct an exact test through inference based on this
conditional distribution. One disadvantage of exact conditional tests is that they can
often perform very conservatively (Liddell, 1978, Suissa and Shuster, 1985, Berger,
1996). However, researchers have suggested that, in some contexts, conditional tests
are preferred (Agresti, 1990, Greenland, 1991, Little, 1989, and Yates, 1984).
For reasons we will discuss later, in the general problem of testing for superiority
and noninferiority, non-trivial conditional methods are unavailable. Thus, in our
analyses of these hypothesis tests, we will employ an exact unconditional approach.
The specific problem we must overcome is the presence of a nuisance parameter when
defining a p-value. One popular unconditional approach to address this problem is to
determine the supremum of the p-value function over the entire nuisance parameter
space. This method is often referred to as the maximization method. Although this
method yields a valid p-value, it can be quite conservative. Berger and Boos (1994)
proposed a method to alleviate this conservativeness by applying a restricted nuisance
parameter space search. This is known as the confidence region p-value method.
Before providing the details of both methods, let us first outline the model
for-mulation of the problem and also discuss the particular test statistic we will be using
Consider a clinical trial where the goal is to compare the efficacy of a new
treat-ment (drug 1) versus that of a standard (drug 2). Let us denoteπ1 and π2 as the true
response rates of the new and standard treatments respectively. Often, researchers
compare these two rates through their difference which we will denote asδ=π1−π2.
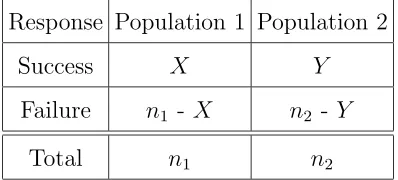
Suppose X and Y are independent binomial random variables. The sample size
forX isn1and its success probability isπ1. The sample size forY isn2and its success
probability is π2. Data stemming from these clinical trials are often summarized in
2×2 contingency tables as shown below.
Response Population 1 Population 2
Success X Y
Failure n1 - X n2 - Y
Total n1 n2
Let us denote the binomial probability mass function of X by
bin(x, n1, π1) = µ
n1 x
¶
π1x(1−π1)n1−x, where x= 0,1, . . . , n1.
Denote bin(y, n2, π2) as the analogous representation of the probability mass
func-tion of Y. The sample space of the random vector (X, Y) will be denoted by
Ω ={0,1, . . . , n1} × {0,1, . . . , n2}.
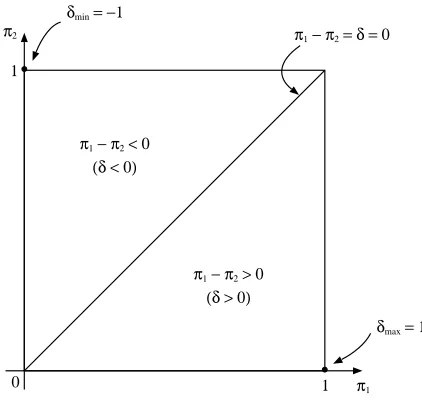
Figure 1.1 is a graphical depiction of the parameter space of (π1, π2). The line
δ=π1−π2 = 0 is overlaid in the figure. Assume higher probabilities indicate stronger
0 1 π1
δmax = 1
π1 − π2 > 0
(δ > 0)
Figure 1.1: Parameter space for (π1, π2).
efficacy of the drug. Thus, the statement “π1 > π2” implies the statement “drug 1
has greater efficacy than drug 2.” In this context, drug 1 is “better” than drug 2 in
the lower right triangular region of the parameter space shown in Figure 1.1. Also,
drug 1 is “worse” than drug 2 in the upper left triangular region of the parameter
space.
1.2
The
δ
Projected
Z
Statistic
In the context of hypothesis testing which we will examine shortly, the test statistic
we will use in ordering the sample space is the so-called δ projected Z statistic, as
coined by Chan (1999). In the following, we formally define this statistic.
Given (x, y) ∈ {0,1, . . . , n1} × {0,1, . . . , n2} and δ0 ∈ (−1,1), the δ projected Z
spectively. Below we describe how the estimates are computed.
Given X =x and Y =y, the likelihood would be
L(π1, π2;x, y) = bin(x, n1, π1) bin(y, n2, π2).
The log likelihood would therefore be
logL(π1, π2;x, y) = log¡n1
x
¢
+xlogπ1+ (n1−x) log(1−π1) + log¡n2
y
¢
+ylogπ2+ (n2−y) log(1−π2).
The restricted maximum likelihood estimator is based upon the restrictionδ0 =π1−π2
orπ2 =π1−δ0. Taking the partial derivative of the log likelihood with respect to π1,
and based upon the given restriction, we have
∂
∂π1logL(π1, π2;x, y) =
x
π1 −
n1−x
1−π1 +
y
π2 −
n2−y
1−π2
= x
π1 −
n1−x
1−π1 +
y
π1−δ0 −
n2−y
1−π1+δ0.
Setting this expression equal to zero this leads to
(n1+n2)π13+ (−x−y−n1−2n1δ0−n2−n2δ0)π21
+ (x+ 2xδ0+y+n1δ0+n1δ02+n2δ0)π1−xδ0(1 +δ0) = 0.
Dividing both sides of the equation above by n1 we obtain
aπ13+bπ12+cπ1+d= 0, (1.2.2)
As discussed by Miettinen and Nurminen (1985) and by Farrington and Manning
(1990), the restricted maximum likelihood estimate for π1 is the unique solution to
(1.2.2) forπ1 ∈(max(0, δ0),min(1,1 +δ0)), defined as eπ1 = 2ucos(w)−b/(3a), where
v =b3/(3a)3−bc/(6a2) +d/(2a),
u= sgn(v)[b2/(3a)2−c/(3a)]1/2, w= (1/3)[π+ cos−1(v/u3)].
e
π2, the restricted maximum likelihood estimate for π2, is given by eπ2 = eπ1 −δ0. Z(x, y;δ0) is referred to as the δ projected statistic since the restricted maximum
likelihood estimatesπe1 andπe2 are the coordinates of a projection of (x/n1, y/n2) onto the lineπ1−π2 =δ0.
1.3
p-value and the Nuisance Parameter Problem
Assuming the differenceπ1−π2is at the null boundary (i.e. δ=δ0), the probability
of observing a particular sample point (X, Y) = (x, y) is given by
fπ1,δ0(x, y) =
µ
n1
x
¶µ
n2
y
¶
π1x(1−π1)n1−x(π
1 −δ0)y(1−π1+δ0)n2−y. (1.3.3)
The expression in (1.3.3) is our basis in defining a p-value and the presence of a
nuisance parameter, π1, poses a problem.
Since a non-trivial conditional approach is unavailable, an alternative is to use an
unconditional approach by employing what is known as the maximization method.
In the framework of hypothesis testing, let us assume that larger values of the
chosen test statistic, say Z, give stronger evidence against the null hypothesis. As
given by Casella and Berger (2002), in the presence of a generic nuisance parameter
θ, we define a p-value, as
p= sup
θ∈Θ0
Pθ(Z ≥z), (1.3.4)
where z is the observed value of the test statisticZ and Θ0 denotes the null space.
By using Z(x, y;δ0) as our test statistic of choice we see that, as in the case
when testing for superiority and noninferiority, larger values of the test statistic yield
stronger evidence against the null hypothesis. Applying (1.3.4), an unconditional
exact test can be based upon the following p-value:
pu(x, y) = sup
{(π1,π2):π1−π2≤δ0}
X
Z(a,b;δ0)≥Z(x,y;δ0)
fπ1,δ0(a, b)
, (1.3.5)
where (a, b)∈ {0,1, . . . , n1} × {0,1, . . . , n2}. Note that the p-value is found by
deter-mining the supremum of the sum over the entire two dimensional null space, which
can be an extremely time consuming and computationally intensive search. However,
it can be shown that the supremum of the argument in (1.3.5) is achieved on the
{(π1,π2):π1−π2=δ0} Z(a,b;δ0)≥Z(x,y;δ0)
Given π1 −π2 = δ0, for a fixed value of δ0 ∈ (−1,1), it is easy to show that the
nuisance parameter π1 is restricted to the interval [max(0, δ0),min(1,1 +δ0)]. Thus,
an equivalent definition for the p-value is
pu(x, y) = sup
π1∈[max(0,δ0),min(1,1+δ0)]
X
Z(a,b;δ0)≥Z(x,y;δ0)
fπ1,δ0(a, b)
. (1.3.7)
pu(x, y), so labeled since the maximization is performed in anunrestricted fashion
over the entire nuisance parameter range, is the basis for the standard unconditional
exact test. We will commonly refer to pu(x, y) as simply pu. pu is a valid p-value
(i.e. P(π1,π2)∈Θ0[pu ≤α]≤α, where Θ0 denotes the null space). The test that rejects
H0 if and only if pu ≤ α is guaranteed to be a level α test. This also guarantees
that such a test cannot be liberal. However, it opens the possibility of the test to be
quite conservative. The p-value maximization algorithm has surely been simplified
by reducing the search across one dimension instead of two. However, this method
offers a conservative approach since it accounts for the ‘worst case scenario’ with
respect to the nuisance parameter. Thus, the p-value pu can, in many situations, be
unnecessarily low.
maximization over the entire nuisance parameter space, their method involves a
re-stricted maximization which yields a less conservative p-value.
Again, let θ denote the nuisance parameter of interest (possibly vector valued).
Given datax, suppose Cβ(x) is a (1−β) confidence region forθ. DenoteT(x) as the
statistic used to order the sample space and assume large values of T lend stronger
evidence against the null hypothesis of interest. Define p(θ|x) = Pθ[T(X) ≥ T(x)].
The Berger and Boos confidence region p-value is given by
pr(x, y) = sup
θ∈Cβ(x)
p(θ|x) +β. (1.4.8)
pr(x, y), so labeled since the maximization is based on a restricted search of the
nuisance parameter space, will be used to compare against pu. We will commonly
refer to pr(x, y) as simply pr. In defining pr, although the choice of β is left to the
discretion of the researcher, if β is chosen to be too small (i.e. 1−β = 1), then the.
resulting ‘restricted’ search would nearly encompass the entire nuisance parameter
space. Berger and Boos suggest to use values of β such as 0.001 and 0.0001. We
choseβ = 0.001 for all our computations involving pr.
As with pu, pr is also a valid p-value. In their work, Berger and Boos provided
the following proof on the validity of the pr p-value.
Lemma 1.4.1 Suppose that p(θ|x) is a valid p-value for any assumed known value
of θ by θ0. If β > α then, because pC(θ|x) is never smaller than β, Pθ0(pC(θ|x) ≤
α) = 0≤α. If β ≤α, then
Pθ0(pC(θ|X)≤α)
=Pθ0(pC(θ|X)≤α, θ0 ∈Cβ(X)) +Pθ0(pC(θ|X)≤α, θ0 ∈Cβ(X))
≤Pθ0(pC(θ|X) +β≤α, θ0 ∈Cβ(X)) +Pθ0(θ0 ∈Cβ(X))
≤Pθ0(pC(θ|X)≤α−β) +β
≤α−β+β
=α.
The first inequality is true since supθ∈Cβp(θ|x)≥p(θ0|x) whenθ0 ∈Cβ ¥
In our definition of pr, we will use the argument of the supremum in (1.3.7) to
serve the role of p(θ|x) as found in (1.4.8). To construct Cβ(x) in (1.4.8), a (1−β)
confidence region for (π1, π2)∈Θ0 is generated by the cross product of two (1−β)1/2
Clopper Pearson confidence intervals (Clopper and Pearson, 1934), one for π1 and
the other forπ2. The details of constructing Clopper Pearson confidence intervals are
provided in the Appendix. Given a particular observation (X, Y) = (x, y), we will
use (l1, u1) and (l2, u2) to denote the Clopper Pearson confidence intervals for π1 and
π2 respectively. The (1−β) confidence region for (π1, π2)∈Θ0 is [l1, u1]×[l2, u2]∩H0
)
0 1 π1
δmax = 1
(H1space)
( )
l1 u1
l2
Figure 1.2: Shaded area is the (1−β) confidence region for (π1, π2) ∈ Θ0. (l1, u1) and (l2, u2) denote the Clopper Pearson confidence intervals for π1 and π2 respectively.
In the next chapter, we examine the performance of the confidence region
p-value method versus that of the standard method under the framework of testing
for superiority and noninferiority by comparing rejection regions and corresponding
size plots. By inverting these exact tests, we derive exact confidence intervals for
the parameter of interest. In the following chapter, we examine the performance of
the two confidence interval methods through coverage probability and interval length
comparisons.
Comparison of Unconditional
Exact Tests for Testing the
Difference of Independent
Binomial Proportions
Our comparison of the unconditional exact tests will be discussed separately under
the context of testing for superiority and noninferiority. We begin our discussion with
superiority.
For clinical trials where a new treatment is compared to a standard control,
re-searchers are often interested in testing whether the treatment is significantly better
than, orsuperior to, the control. There are different definitions of null and alternative
hypotheses in establishing superiority. Some define the appropriate hypotheses to be:
H0 : π1 ≤π2
H1 : π1 > π2.
(2.1.1)
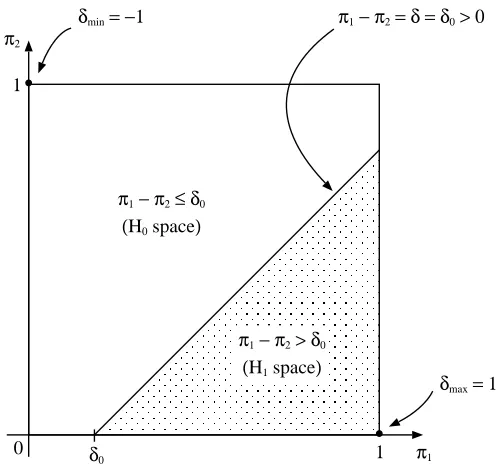
Others define the appropriate hypotheses to be:
H0 : π1 −π2 ≤δ0
H1 : π1 −π2 > δ0,
(2.1.2)
where δ0 > 0 is a clinically significant value determined by researchers. In order to
differentiate between these two sets of hypotheses, some, such as Mart´ın Andr´es and
Herranz Tejedor (2002), refer to the hypotheses in (2.1.1) in the context ofsuperiority
and the hypotheses in (2.1.2) in the context of substantial-superiority. Figure 1.1
represents the hypothesis spaces specified by (2.1.1), and Figure 2.1 represents the
hypothesis spaces specified by (2.1.2). In this work, we will not make the distinction
between these two labels and will refer, in general, to hypotheses in the form of (2.1.2)
in the context of superiority.
0 1 π1
δmax = 1
(H0space)
π1 − π2 > δ0 (H1space)
δ0
Figure 2.1: Superiority hypothesis spaces as specified by (2.1.2).
2.1.2
Computation Study
In the context of hypothesis testing for superiority, we have examined the
perfor-mances of the competing exact methods under various settings of the sample sizesn1
and n2. Namely, we examined a total of nine sample size combinations of (n1, n2),
wheren1 :n2 ∈ {1:1,2:1,3:1}andn1+n2 ∈ {20,60,100}. The hypotheses of interest,
H0 : δ ≤δ0 versus H1 :δ > δ0, were examined under δ0 ∈ {0.0,0.1,0.2, . . . ,0.9} and
at significance levelsα ∈ {0.01,0.05,0.10}. We have included the δ0 = 0 case here so
that, combined with our noninferiority study to be discussed later, analyses based on
a complete range of δ0 values will be performed. Thus, our analyses in this section
will be based on both (2.1.1) and (2.1.2).
Since we will often refer to the tests based on pr andpu, let us denote the α level
2.1.3
Examples of
T
prPerformance Relative to
T
puProbability Plot Example: (x, y)∈ Rpr, (x, y)6∈ Rpu
Before discussing the complete results from our computation study, let us take a
close examination of a probability plot based on a particular sample point where the
pr method proves to be advantageous.
In Figure 2.2 we consider the probability plot for the sample point (x, y) = (30,16),
where (n1, n2) = (50,50), δ0 = 0.10, and α = 0.05. The unrestricted p-value
prob-ability plot is represented by the dash-dot line. Note that the graph is based upon
the entire nuisance parameter space (0.1,1). The p-value pu is defined as the
max-imum height of the plot, approximately 0.058, which clearly exceeds the horizontal
reference line of α = 0.05. Thus, (x, y) = (30,16) would not be included in the set
Rpu. Notice that the peaks of the pr graph, which appear near the extremes of the
nuisance parameter space, are the culprits responsible for keeping (30,16) out ofRpu.
Much of the pu graph is well below the α level. However, the conservative approach
of the unrestricted p-value method dictates that we consider the worst case scenario,
even when such a scenario is not well supported by the data.
respectively in Figure 2.2. This confidence interval is used as the restricted domain of
the dash-dot probability plot in determining pr. To be more specific, the p-value pr
is defined as the maximum of the restricted domain probability plot plus the penalty
term of β = 0.001. This modified probability plot is shown by the solid curve lying
above the dash-dot curve. Note that the restricted domain lies significantly away
from the endpoints of the entire nuisance parameter space. With the added penalty
term ofβ, we see that the maximum of the solid curve is approximately 0.039. Thus,
(x, y) = (30,16) would be included in the setRpr.
Figure 2.2 is a good illustration of how conservative thepu method can be. Using
a restricted interval with high confidence of 99.9%, the data indicate the true value
of the nuisance parameter is closer to the center of the parameter space as opposed
to the ends where the sharp peaks of the probability plot exist.
0.2 0.4 0.6 0.8 1.0
0.035
0.040
0.045
0.050
Probability
Nuisance Parameter
L U
Figure 2.2: (x, y) ∈ Rpr, (x, y) 6∈ Rpu. Probability plot for testing H0 : δ ≤ 0.10 at the
α= 5% level given (n1, n2) = (50,50) and observation (x, y) = (30,16). The dash-dot line is based onpu, the solid line is based onpr. The pointsLandUare, respectively, the lower and upper limits of π1 based on the confidence region (β= 0.001) p-value approach.
Probability Plot Example: (x, y)6∈ Rpr, (x, y)6∈ Rpu
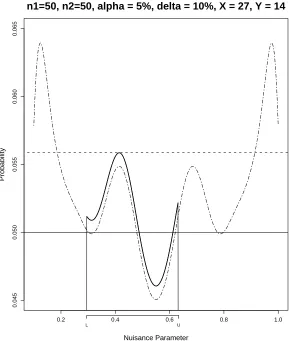
Now, let us consider an example where the sample point is excluded from both
rejection regions. In Figure 2.3 we consider the probability plot for the sample point
(x, y) = (27,14). This is, again, from the analysis of the (n1, n2) = (50,50),δ0 = 0.10,
and α= 0.05 setting. The unrestricted p-value probability plot is represented by the
For this example the pr approach does not help in capturing (27,14) in Rpr. We
calculated our 99.9% confidence region for the nuisance parameter to be (0.249,0.633).
Again, the lower and upper limits of this confidence interval are represented byLandU
respectively in Figure 2.3. The modifiedprprobability plot is shown by the solid curve
lying above the dash-dot curve. With the added penalty term of β = 0.001, we see
that the maximum of the solid curve is approximately 0.056. Thus, (x, y) = (27,14)
is also excluded from the set Rpr.
Although it is the case that the sample point was excluded from both rejection
regions, it is worth noting in this example that the pr p-value was less conservative
than the corresponding pu p-value. With this in mind, the pr method does offer an
advantage in that it yields stronger evidence against the null hypothesis of interest.
Later, when we discuss testing for noninferiority, we will illustrate an example showing
how the pr method can be disadvantageous.
0.2 0.4 0.6 0.8 1.0
0.045
0.050
0.055
Probability
Nuisance Parameter
L U
Figure 2.3: (x, y) 6∈ Rpr, (x, y) 6∈ Rpu. Probability plot for testing H0 : δ ≤ 0.10 at the
α= 5% level given (n1, n2) = (50,50) and observation (x, y) = (27,14). The dash-dot line is based onpu, the solid line is based onpr. The pointsLandUare, respectively, the lower and upper limits of π1 based on the confidence region (β= 0.001) p-value approach.
2.1.4
Results
Rejection region comparisons based upon all ten δ0 values are summarized in
Tables 2.1 through 2.10. In each of the tables, we use |Rpr| and |Rpu| to denote
the cardinalities of the rejection regions based onpr and pu respectively. |Rpu\ Rpr|
refers to the number of points of Rpu not common toRpr. Analogously, |Rpr \ Rpu|
n1 :n2 = 1:1
For n1 :n2 = 1:1, the two rejections regions are often identical. This is especially
the case for (n1, n2) = (10,10) and (30,30). For higher values of δ0, the number of
sample points captured in either rejection region diminishes leaving little room for
the two sets to be very different. Thus, it is not surprising to see entries that are very
close to or equal to zero for |Rpu\ Rpr|and |Rpr \ Rpu|for larger δ0. This, of course,
will be a common phenomenon across all sample size ratios.
One important case worth noting is (n1, n2) = (50,50). For δ0 = 0.10 and 0.20,
we see that Rpu is contained in Rpr at each significance level setting. That is, Tpr is
uniformly more powerful than Tpu.
In Table 2.2, we limited our focus onn1+n2 = 20, 60, and 100 and we discovered
the pr method yielded benefits for the largest sample size sum. We performed a
further analysis of other 1:1 ratios to gain a better understanding of the performance
of Tpr based upon popularly used balanced sample size cases. This information is
summarized in Table 2.11. Based on this table, we see that, in the case where δ0 =
0.10,Tpr is found to be more powerful from as early as n1 =n2 = 40. With the seven
sample size settings found in (n1, n2) ∈ {(40,40),(50,50), ...,(100,100)}, keeping in
mind the three levels of α, this leads to a total of 21 possible analyses. Of these
nearly contains all ofRpu. Overall, we can see that thepr method performs very well,
in general, for 1:1 cases whenn1+n2 ≥80. Later, we will investigate this further by
discussing an interesting feature of the size plot based on (n1, n2) = (100,100).
n1 :n2 = 2:1
For n1 : n2 = 2:1, the performance of the pr based test improves. Note that, in
many cases,Rpu is a proper subset ofRpr. For example, in Table 2.2 whereδ0 = 0.10,
Tpr is uniformly more powerful in virtually all cases for (n1, n2) = (40,20) and (66,34).
In the smallest sample size setting (n1, n2) = (13,7), Tpr does not offer much of an
advantage. It is worth noting that, when Tpu is uniformly more powerful than that
of Tpr, the Rpu rejection region typically contains only one or two more points than
those contained in Rpr. In Table 2.3 where δ0 = 0.20, Tpr is again uniformly more
powerful in virtually all cases for (n1, n2) = (40,20) and (66,34). Here, we see that
a mixed result appears in this table for (n1, n2) = (40,20) and α = 0.01. Note that
|Rpu\ Rpr|= 2, whereas |Rpr \ Rpu|= 8. Thus, neither rejection region is a proper
subset of the other and hence the corresponding size plots would cross. An important
observation to note is that, when the rejection setRpu gains additional points beyond
that of Rpr, this gain is small relative to the number of points the rejection set Rpr
n1 :n2 = 3:1
For n1 :n2 = 3:1, the performance of Tpr continues to improve. Tpr is at least as
powerful as, and many times uniformly more powerful than,Tpu. We note again that,
as in the 2:1 case,Tpr does not offer any advantages for the smallest sample size setting.
When (n1, n2) = (45,15) or (75,25) the benefit of using Tpr is quite apparent. As
discovered in the 2:1 case, we find thatpr is not uniformly more powerful for all cases.
As an example, consider Table 2.2 where δ0 = 0.10. For (n1, n2) = (75,25), except
for the case where α = 5%, we see that mixed results appear. However, as in the
mixed result case discussed in the previous sample size ratio, we note that|Rpu\ Rpr|
is small relative to |Rpr \ Rpu|. For example, in the α = 1% case, |Rpu \ Rpr| = 3,
whereas|Rpr\ Rpu|= 21. In general, this relationship is maintained in the remaining
tables as well. The summary for the 2:1 case is applicable once again: the gains of
the pr method outweigh the losses it incurs.
0.01 |Rpu| 17 261 833 14 217 703 9 172 556
|Rpr| 17 259 831 13 223 722 9 175 578
|Rpu\ Rpr| 0 2 4 1 0 1 0 0 0
|Rpr\ Rpu| 0 0 2 0 6 20 0 3 22
0.05 |Rpu| 29 322 967 24 271 843 19 228 689
|Rpr| 29 322 967 24 278 854 19 229 695
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 1
|Rpr\ Rpu| 0 0 0 0 7 11 0 1 7
0.10 |Rpu| 32 345 1016 30 306 914 20 230 689
|Rpr| 32 351 1034 30 309 920 22 251 750
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 6 18 0 3 6 2 21 61
0.01 |Rpu| 12 193 619 10 138 514 4 96 410
|Rpr| 12 193 629 8 159 547 4 120 428
|Rpu\ Rpr| 0 0 0 2 0 0 0 0 3
|Rpr\ Rpu| 0 0 10 0 21 33 0 24 21
0.05 |Rpu| 19 247 718 16 216 659 10 147 519
|Rpr| 19 247 741 16 216 662 10 168 534
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 23 0 0 3 0 21 15
0.10 |Rpu| 25 277 801 21 231 698 19 200 587
|Rpr| 25 277 810 22 239 721 18 200 591
|Rpu\ Rpr| 0 0 0 0 0 0 1 0 1
|Rpr\ Rpu| 0 0 9 1 8 23 0 0 5
0.01 |Rpu| 8 134 452 7 107 369 4 82 298
|Rpr| 8 136 463 5 113 397 4 89 310
|Rpu\ Rpr| 0 0 0 2 2 0 0 0 0
|Rpr\ Rpu| 0 2 11 0 8 28 0 7 12
0.05 |Rpu| 14 179 556 13 158 486 6 115 396
|Rpr| 14 179 562 13 159 494 6 123 401
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 6 0 1 8 0 8 5
0.10 |Rpu| 19 206 611 16 179 530 12 151 428
|Rpr| 19 206 613 16 181 546 12 150 448
|Rpu\ Rpr| 0 0 0 0 0 0 0 1 0
|Rpr\ Rpu| 0 0 2 0 2 16 0 0 20
0.01 |Rpu| 5 97 318 4 77 264 2 53 213
|Rpr| 5 97 322 4 79 277 2 57 215
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 2
|Rpr\ Rpu| 0 0 4 0 2 13 0 4 4
0.05 |Rpu| 10 132 412 9 114 347 5 76 279
|Rpr| 10 132 410 9 112 358 5 88 288
|Rpu\ Rpr| 0 0 2 0 2 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 11 0 12 9
0.10 |Rpu| 14 154 455 11 127 394 9 105 328
|Rpr| 14 152 455 11 130 402 9 106 329
|Rpu\ Rpr| 0 2 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 3 8 0 1 1
0.01 |Rpu| 3 63 220 1 51 189 0 36 132
|Rpr| 3 59 220 1 50 188 0 35 138
|Rpu\ Rpr| 0 4 0 0 1 1 0 2 0
|Rpr\ Rpu| 0 0 0 0 0 0 0 1 6
0.05 |Rpu| 6 90 282 5 71 250 3 61 199
|Rpr| 6 90 282 5 74 250 3 61 197
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 2
|Rpr\ Rpu| 0 0 0 0 3 0 0 0 0
0.10 |Rpu| 8 107 318 8 93 278 6 74 223
|Rpr| 8 105 318 8 93 280 6 75 229
|Rpu\ Rpr| 0 2 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 2 0 1 6
0.01 |Rpu| 1 38 138 1 29 109 0 19 84
|Rpr| 1 38 132 1 28 111 0 20 84
|Rpu\ Rpr| 0 0 6 0 1 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 2 0 1 0
0.05 |Rpu| 3 57 179 2 45 155 2 33 116
|Rpr| 3 55 179 2 45 157 2 36 124
|Rpu\ Rpr| 0 2 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 2 0 3 8
0.10 |Rpu| 6 66 202 5 59 185 3 47 144
|Rpr| 6 66 208 5 59 186 3 47 149
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 6 0 0 1 0 0 5
0.01 |Rpu| 0 19 72 0 13 60 0 10 41
|Rpr| 0 19 72 0 13 61 0 8 40
|Rpu\ Rpr| 0 0 0 0 0 0 0 2 2
|Rpr\ Rpu| 0 0 0 0 0 1 0 0 1
0.05 |Rpu| 1 32 105 1 23 93 0 21 71
|Rpr| 1 32 105 1 25 93 0 20 71
|Rpu\ Rpr| 0 0 0 0 0 0 0 1 0
|Rpr\ Rpu| 0 0 0 0 2 0 0 0 0
0.10 |Rpu| 3 40 124 2 33 111 2 27 85
|Rpr| 3 40 124 2 33 111 2 27 88
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 0 0 0 3
0.01 |Rpu| 0 8 34 0 5 23 0 3 16
|Rpr| 0 6 32 0 5 24 0 3 16
|Rpu\ Rpr| 0 2 2 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 1 0 0 0
0.05 |Rpu| 1 15 53 0 13 45 0 9 34
|Rpr| 1 15 53 0 13 45 0 9 34
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 0 0 0 0
0.10 |Rpu| 1 21 66 1 16 58 0 12 44
|Rpr| 1 21 65 1 16 58 0 13 44
|Rpu\ Rpr| 0 0 1 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 0 0 1 0
0.01 |Rpu| 0 1 10 0 0 7 0 0 4
|Rpr| 0 1 10 0 0 7 0 0 4
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 0 0 0 0
0.05 |Rpu| 0 5 19 0 3 16 0 2 11
|Rpr| 0 5 17 0 3 16 0 2 11
|Rpu\ Rpr| 0 0 2 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 0 0 0 0
0.10 |Rpu| 0 6 21 0 6 22 0 4 16
|Rpr| 0 6 21 0 6 22 0 4 16
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 0 0 0 0
0.01 |Rpu| 0 0 1 0 0 0 0 0 0
|Rpr| 0 0 1 0 0 0 0 0 0
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 0 0 0 0
0.05 |Rpu| 0 1 3 0 0 2 0 0 0
|Rpr| 0 1 3 0 0 2 0 0 0
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 0 0 0 0
0.10 |Rpu| 0 1 3 0 0 3 0 0 2
|Rpr| 0 1 3 0 0 3 0 0 2
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0
|Rpr\ Rpu| 0 0 0 0 0 0 0 0 0
α (10) (20) (30) (40) (50) (60) (70) (80) (90) (100)
0.01 |Rpu| 12 74 193 383 619 935 1284 1722 2295 2794
|Rpr| 12 74 193 379 629 947 1333 1789 2321 2915
|Rpu\ Rpr| 0 0 0 4 0 0 2 0 2 0
|Rpr \ Rpu| 0 0 0 0 10 12 51 67 28 121
0.05 |Rpu| 19 99 247 457 718 1099 1541 1981 2591 3265
|Rpr| 19 99 247 459 741 1105 1539 2033 2613 3271
|Rpu\ Rpr| 0 0 0 0 0 0 2 0 0 0
|Rpr \ Rpu| 0 0 0 2 23 6 0 52 22 6
0.10 |Rpu| 25 113 277 481 801 1180 1640 2108 2736 3441
|Rpr| 25 113 277 501 810 1186 1644 2166 2774 3447
|Rpu\ Rpr| 0 0 0 0 0 0 0 0 0 0
|Rpr \ Rpu| 0 0 0 20 9 6 4 58 38 6
correspond to the information found in Table 2.2. In the interest of space, we provide
size plots only for δ0 = 0.10, although the figures are sufficient to illustrate the
behavior of Tpr relative to Tpu. In each figure, the plots are arranged in an array of
three rows and three columns. The rows, from top to bottom, correspond to sample
size ratios of 1:1, 2:1, and 3:1 respectively. The columns, from left to right, correspond
to n1 +n2 = 20, 60, and 100 respectively. For each plot, the solid line refers toTpu,
the dotted line refers to Tpr.
From the plots we again note that Tpr is not as powerful when n1+n2 = 20 (first
column). However, for the second and third columns, we find that, in general, Tpr is
at least as powerful as Tpu. The mixed results we alluded to earlier is illustrated in
Figures 2.4 and 2.6 for (n1, n2) = (75,25) by the crossing of the two graphs.
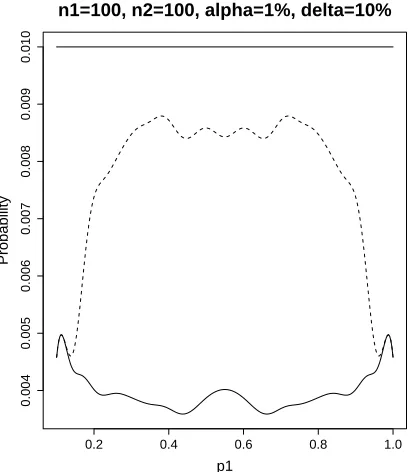
Referring back to our in-depth investigation of the 1:1 sample size cases
summa-rized in Table 2.11, a size plot based upon (n1, n2) = (100,100) illustrates how
con-servativeTpu can be. This plot is given in Figure 2.7. Notice that the solid line based
uponpu achieves a maximum height of onlyhalf the value of the level of significance.
To investigate this further, we determined that the rejection region to construct the
size plot for Tpu in Figure 2.7 and considered what would occur to the probability
plot when the next extreme point from the sample space was included. This
corresponding to this set is represented by the broken line in Figure 2.8. As shown
in the figure, the updated set causes the probability plot to jump significantly to a
height just above the level of significance (0.010007>0.01). Because of this fact, the
Tpu size is forced unusually below the level of significance making it very conservative.
0.2 0.4 0.6 0.8 1.0
0.000
0.002
p1
0.2 0.4 0.6 0.8 1.0
0.002
0.004
p1
0.2 0.4 0.6 0.8 1.0
0.003
0.004
p1
0.2 0.4 0.6 0.8 1.0
0.000 0.002 0.004 0.006 0.008 0.010
n1=13, n2=07, alpha=1%, delta=10%
p1 P ro b a bili ty
0.2 0.4 0.6 0.8 1.0
0.000 0.002 0.004 0.006 0.008 0.010
n1=40, n2=20, alpha=1%, delta=10%
p1 P ro b a bili ty
0.2 0.4 0.6 0.8 1.0
0.000 0.002 0.004 0.006 0.008 0.010
n1=66, n2=34, alpha=1%, delta=10%
p1 P ro b a bili ty
0.2 0.4 0.6 0.8 1.0
0.000 0.002 0.004 0.006 0.008 0.010
n1=15, n2=05, alpha=1%, delta=10%
p1 P ro b a bili ty
0.2 0.4 0.6 0.8 1.0
0.000 0.002 0.004 0.006 0.008 0.010
n1=45, n2=15, alpha=1%, delta=10%
p1 P ro b a bili ty
0.2 0.4 0.6 0.8 1.0
0.000 0.002 0.004 0.006 0.008 0.010
n1=75, n2=25, alpha=1%, delta=10%
p1 P ro b a bili ty
Figure 2.4: Size plots for testingH0:δ≤0.10 at theα= 1% level. The solid line is based onTpu, the dotted line is based onTpr. The rows, from top to bottom, correspond to sample size ratios of 1:1, 2:1, and 3:1 respectively. The columns, from left to right, correspond to
n1+n2= 20, 60, and 100 respectively.