103
Building Identification Utilizing Improved HOG– LBP
Highlights & Region Refinement Forms Using CNN
Ayesha Siddiqha, P.M Mallikarjuna Shastry, R Hebbar
Abstract - Satellite imaging, or remote sensing, is the scanning of theearth by satellite in order to obtain information about it.Satellites use different kinds of sensors to collect electromagnetic radiation reflected from the Earth: Passive sensor and Active sensor. A multispectral image is one that captures image data within specific wavelength ranges across the electromagnetic spectrum. Spectral imaging can allow extraction of additional information the human eye fails to capture with its receptors. An enhanced building detection method that consists of two modules has been proposed. The first module is a feature detector that extracts histograms of oriented gradients (HOG) and local binary patterns (LBP), Second module consists of a set of region refinement processes.
Building revelation from two-dimensional high-determination satellite pictures is a PC vision, photogrammetry, and remote distinguishing errand that has developed in the latest decades with the advances in sensors development and can be utilized as a part of a couple of uses that require the arrangement of urban maps or the examination of urban changes. Regardless, the variety of insignificant articles that appears in urban area and takes after structures, and the significant assortments in the shape and generally the nearness of structures render building area an extremely asking for errand. Along these lines, motorized strategies that can enthusiastically recognize structures in satellite pictures are critical. To this end, we propose a building area strategy that contains two modules. The first module is a segment discoverer that concentrates histograms of masterminded inclines (HOG) and neighbourhood parallel cases (LBP) from picture regions. Utilizing a novel approach, a help vector machine classifier is prepared with the presentation of a unique de-noising separation measure for the figuring of partitions between HOG– LBP descriptors before their classification to the building or non-building class. The second module includes a plan of region refinement shapes that utilize the yield of the HOG– LBP indicator as distinguished rectangular picture zones. Picture division is performed and a novel building acknowledgment philosophy is proposed to precisely recognize building districts, while at the same time dispose of bogus recognitions of the first module of the proposed methodology. We demonstrate that the proposed methodology can healthily recognize structures from satellite pictures and out performs best in class building location procedures.
I. INTRODUCTION
Land cover gathering is a comprehensively thought about field since the nearness of the essential satellite pictures. Over the latest two decades, the sensors annexed to satellites have progressed in a way that nowadays allows the catch of high-assurance multispectral satellite pictures. This mechanical advance made the recognizable proof and portrayal of structures and other man-made structures from satellite pictures possible. Building area from satellite pictures can find an incentive in a couple of remote-distinguishing applications, for instance, city orchestrating, urban mapping, and urban change disclosure. The data of building territories can be shown beneficial to locales in their undertakings to help, secure, and guarantee their locals, while unlawful building development activities can without quite a bit of an extend be perceived and compelled. Also, urban expansion or rot can be considered and associated with climatic changes
and social, money related, or ordinary factors, and fitting measures and defends can be taken to ensure human prospering.
104
recognizable proof from two-dimensional (2– D) multispectral pictures is an amazingly troublesome errand. The way that structures appear in changed sizes and shapes makes the headway of a comprehensive approach exceptionally troublesome. In addition, building rooftops in a urban space may move terribly and there can even be spooky or surface assortments in a comparable roof. The inconvenience of building acknowledgment can furthermore be enhanced by the way that modestly little structures can be hindered by objects, for instance, trees and greater structures. Moreover, atmosphere conditions and
sun region can truly impact the idea of a satellite picture and consequently impact the building distinguishing proof technique.
Notwithstanding the way that the nearness of high-assurance multispectral pictures allows a lift in the heaviness of building disclosure by displaying exact and more information rich data, it in like manner raises a hell in the treatment of such titanic measure of data. In like manner, the change of capable, exact, and computationally speedy building distinguishing proof systems is of focal centrality.
The most famous and generally utilized technique for picture division is Thresholding strategies. In this strategy, picture pixels are partitioned with the assistance of force level of a picture. This strategy is essentially used to recognize the frontal area objects from foundation pictures. In this articles are lighter than its experience.
Determination of this strategy relies on our earlier an associated pixel that is found on the limit of the locale is called an edge. So these pixels on an edge are known as edge points. Edge can be figured by finding the subsidiary of a picture work. A few edges are anything but difficult to discover.
These are: Ramp edge, Step edge, Roof edge, Spike edge. Step edge is an unexpected change in power level. Incline edge is a steady
change in force. Spike edge is a Speedy change in power and after those profits promptly to a unique force. Rooftop edge isn't instantaneous over a short separation. Edge based picture division strategy falls under auxiliary systems.
The Gap statistic is enumerated using the Within-dispersion measure if the clustered image pixel and then it measures Wkb, b=1 … B evaluated as in(9) from B triggered subsets of image pixels. The initial sets of image pixels are drawn uniformly.
Gap ( ) ∑ ( ) ( )
(1)
105
pixels prompts the arrangement of a normal reference circulation to which the underlying arrangement of pixels is thought about. The bigger the quantity of subsets B, the more exact the reference circulation.
Thus, the ideal number of bunches is equivalent to the littlest estimation of k. for which
( ) drops the most remote underneath the normal reference dispersion . The ideal number of bunches k is dictated by utilizing the Gap measurement on the yield of the k-implies calculation for expanding estimations of k. The k-implies calculation is computationally quicker than its EM partner particularly for expansive estimations of k, Thus it s a chosen bunching approach at this stage. ubsequently we utilize k to prepare k Gaussian modules for the EM calculation, which creates the last picture division. Every pixel is named in light of their shading esteems, where rather than the Red-Green-Blue (RGB) shading space, the tone immersion estimation of (HSV) shading space is utilized for two fundamental reasons; not at all like the RGB shading space, the segments of the HSV shading space are free of each other and the hue(H) and saturation(S) channels are force and shadow invariant; Thus, the division strategy in view of HSV delivers more heterogeneous locales inside the basic question limits.
The NIR channel is likewise utilized along the three HSV shading channels, and takes an interest in the picture division methodology. Because of the way that the H directs is communicated in degrees and has values in the range [0,360], the change (2) is proposed so the new qualities are in the range [0,1], similar to the case for the other three unearthly channels(S,V,NIR).
(
) (2)
2. LITERATURE SURVEY
Building disclosure from 2– D photocopy has been accomplished utilizing an assortment of strategies, where a building can be depicted either as a gathering of pixels sharing some normal properties or as a protest portrayed by unambiguous character or geometric properties. Pixel-based techniques endeavor to cut structures by fittingly bunching picture pixels into homogeneous land. A review of the faddish among these strategies takes after. L. Theng [1] proposed a dynamic form calculation to portion structures from setting. The introduction of the dynamic form calculation was made utilizing a round thrown calculation [1].
K. Karantzalos and D. Argialas [2] proposed a level-set division way to deal with the building discovery errand, in view of the thought that structures can be depicted by secure enrichments (shape, shading, surface, and so on.) that permits the figuration of an appropriate vitality work.
D. Singh et al.[3] recommended "Building extraction from high determination multispectral pictures utilizing NDVI based division and morphological administrators," It is regularly hard or even difficult to create a vitality work that can portray each engineering in a urban region, because of shading and shape varieties structures jog out. As in our approach, a few different techniques exploit the standardized distinction vegetation record (NDVI) to isolate man-made articles from vegetation. Singh et al. utilized NDVI to expel vegetation and sifted the rest of the picture areas to keep just those with sizes in a range fit to speak to building candidate.
T. Hermosilla et al.[4] prospected "Assessment of programmed fabricating location approaches consolidating high determination pictures and LiDAR information", the system was taken after with the augmentation of a protest based characterization technique after the vegetation ousting to separate blobs that have a place with structures from blobs that don't.
Sirmacek and Unsalan [5] utilized a building discovery strategy in light of the amalgamation of scale-invariant component change key focuses and diagram hypothesis. Then again, question based strategies recognize appearance or distil shapes from a picture that can describe structures. They utilized sub chart coordinating to recognize urban regions and diagram slices to diagnosticate isolate structures in a urban domain. B. Sirmacek and C. Unsalan [6] arranged "A probabilistic system to identify structures in flying and satellite pictures", in another work, similar creators built up a strategy to separate edge [Harris, highlights from quickened portion test (FAST)], Gabor highlights, and slope size based help areas (GMSR) from satellite and airborne pictures. They processed the part thickness estimation of these highlights and consolidated those utilizing information and decision combination plans to find building focuses.
P. Hough [7] prescribed "Technique and means for perceiving knotty examples", in a few investigations, lines ended up being huge highlights for the gig of building espial. Lines can either be found by Hough change or by recognizing edges and framing edge chains.
106
building unmasking". Edge affixes were utilized to recognize lines, which were utilized at a downstream stage to shape building hopefuls.
D. Haverkamp [9] asked "Programmed constructing extraction from IKONOS symbolism", the missing lines were induced and rectangles were shaped. Another building following strategy in view of line gathering was wandered here in this approach.
D. Charm et al. [10] propelled "Building discovery and reproduction from aeronautical pictures", where the creators consolidated line gathering and corner marking to shape building speculation.
D. Charm et al. [11] planned Parameterized shapes, to be specific formats, are utilized as an elective method to settle the undertaking of building introduction utilized deformable layouts of subjective scale and introduction to fit with the blobs removed in the wake of applying a stature limit to a computerized rise display.
Karantzalos and Paragios [12] submitted consolidated a level-set division approach driven by 2– D shape priors to accomplish building division in urban zones. They exhibited that the presentation of shape layouts in an information driven approach can enhance the building recognition comes about.
O. Benarchid et al.[13] conspired "Building extraction utilizing object-based grouping and shadow data in high determination multispectral pictures, a contextual analysis: Tetuan, Morocco", Shadow recognition has additionally been consolidated in a few building location techniques, as an approach to mean the presence of tall structures, which can be applicant structures. How-ever, shadow location methods can be essentially influenced by the situation of sun the time the picture is caught.
S. Kluckner and H. Bischof[14] unexpected "Picture based building scientific classification and 3D demonstrating with super-pixels", The advances in the field of computerized reasoning have started the utilization of machine learning methods to take care of the issue of building recognition. Super pixels, the littlest bunches of pixels with comparative multispectral data that can be framed.
A. Shackelford and C. Davis[15] decided "A joined fluffy pixel-based and protest based approach for grouping of high-determination multispectral information over urban regions", The creators utilized restrictive irregular fields to mark super pixels and frame building competitors. They utilized a pixel-based fluffy classifier to mark
pixels in a multispectral picture and a district consolidating division methodology to part a picture into persuasive dis-joint arrangements of pixels. A short time later, they utilized skeletonization and polygon similarity methods to surmise the limits of the distinguished structures.
Z. Sheng-hua et al.[16] proffered "another strategy for building recognition from a solitary airborne photo," Similarly, fluffy rationale surmising with surface and line highlights was utilized in [16] to identify structures in an elevated picture.
To recognize building districts, Senaras et al. [17] separated different ghastly, surfaces, and shape highlights, prepared a base-layer fluffy classifier for each component, and melded these classifiers' choices by a meta-layer fluffy classifier.
Chai et al. [18] utilized a Markov irregular field (MRF) for low-level demonstrating of otherworldly information and stamped point forms for abnormal state displaying of structures. They joined these two models and upgraded the outcomes utilizing recreated tempering so as to section structures from the foundation.
O. O. Karadag et al. [19] purposed "Division combination for building discovery utilizing area particular data," A MRF structure that adventures information particular to the specific appearance of structures, for example, shadow, rectangularity, and vegetation, was likewise utilized into building recognition.
At long last, Femiani et al. [20] exploited shadow data and vegetation limitations to drive a diagram cut calculation toward an effective building division.
3 SYSTEM REQUIREMENTS HARDWARE REQUIREMENTS
Processor : Intel core i5 HDD : 500GB
RAM : 16GB/8GB/4GB
SOFTWARE REQUIREMENTS
Operating System : Win10(64 bit)
Tool : MATLAB Language : C,C++ and Python Library : OpenCV Lib
CLIENT REQUIREMENTS
Image segmentation has to be performed.
Accurately identify building regions.
107
4. PROBLEM STATEMENT
Building rooftops in an urban environment may vary spectrally and there can even be spectral or texture variations in the same rooftop cause difficulty in detection.
Difficulty of building detection can further be magnified by the fact that relatively small buildings can be occluded by objects, such as trees and larger buildings.
Shadows created by the Sun may create unnecessary details or hide the required information in the area.
Weather condition may also juggle the details in the landscape.OBJECTIVES FOR PROPOSED WORK
Image segmentation has to be performed.
Edge Detection is then performed.
HOG-LBP algorithm is introduced to extract the features in the Image.
A strategy is proposed that finds and concentrates building districts from the location of the HOG– LBP calculation.
A CNN Classifier is used to classify the detected buildings.
Region Refinement form is used to Purify, classify and filter the Region.5. PROPOSED METHODOLOGY
Our proposed system defeats a portion of the natural drawbacks of different strategies. In the first place, the parameters of the HOG– LBP calculation are issue particular and accordingly, they can be set to accomplish acceptable outcomes with pictures of various spatial or ghastly determination. Second, the HOG– LBP calculation is vigorous to shape varieties and can recognize an assortment of shapes, given that it is prepared with a delegate set of conceivable building shapes. At long last, we defeat one of only a handful couple of inborn constraints of the HOG– LBP identifier, which is its failure to precisely outline building limits. To counter this, we propose a technique that finds and concentrates building locales from the discoveries of the HOG– LBP calculation. As we will illustrate, our proposed strategy “Building
identification utilizing improved HOG– LBP highlights & region refinement forms using CNN” performs superior to other best in class calculations that utilize numerous highlights to explain the undertaking of building recognition. The proposed approach can be part in two modules: the HOG– LBP pointer and the Region refinement
framework. The HOG– LBP locator is used both in the planning and in the testing time of the count. HOG– LBP descriptors are expelled from the planning pictures and used for the readiness of a CNN show using the cosine-based division work. Perfect Platt parameters are moreover gotten the hang of in the midst of the planning stage to change the CNN respects probabilities. In the testing stage, HOG– LBP descriptors are gained from rectangular zones through thick analysing of a photo and are organized in two classes, specifically the building and non-building class. The region refinement strategy is used just in the testing stage and is stressed over the division of an attempted picture, the count of the vegetation and water covers, and the advancement of the last building zone candidates by picking the well on the way to contrast with a building picture area for each positive HOG– LBP rectangular disclosure.
6. ANALYSIS OF TECHNIQUE USED FOR IMAGE CLASSIFICATION
CNN CLASSIFIER
In machine taking in, a convolutional neural network is a set of critical, bolster forward anew sensual structures that have sufficiently been related with isolating optical symbolism.
CNNs utilize a collection of multifarious models proposed to demand immaterial pre-taking care of. They are by and large called move invariant or space invariant imposter neural structures (SIANN), in context of their mutual weights outlining and explanation conservative streaks.
Whorl structures were invigorated by fundamental strategy in that the receptiveness outline in the midst of afferent cells takes after the relationship of the outer columns. Individual cortical cells answer to holders just in a poky zone of the optical meadow known as the open mead. The responsive plots of different cells generally veil with the honest to goodness focus on that they cover the unmarred optical mead.
CNNs use generally skimpy pre-dealing with emerged from fresh picture gathering forecast. This recommends the system takes in occupies that in conventional figuring's were hand-laid out. This self-control from earlier information and human exertion in consolidate setup is a fundamental favoured perspective.
108
Fig 2: block diagram of the building Region Detection algorithm, along with corresponding results of running the algorithm on a HOG-LBP detectionFig 3: Block diagram of CNN Methodology.
The proposed approach can be part in two modules: the HOG– LBP marker and the district refinement framework. The HOG– LBP locator is worn both in the readiness and in the trying out time of the figuring. HOG– LBP descriptors are expelled from the arrangement pictures and used for the readiness of a CNN exhibit using the cosine-based partition work. Perfect Platt criterions are in like manner gotten the hang of in the midst of the planning stage to change the CNN respects probabilities. In the testing stage, HOG– LBP descriptors are gained
[image:6.595.188.412.410.610.2]109
rapidly above is conferred in Fig. 5, where the two chunks close by amidst affiliations are appeared.
The planning and proving times of the count are
also depicted.
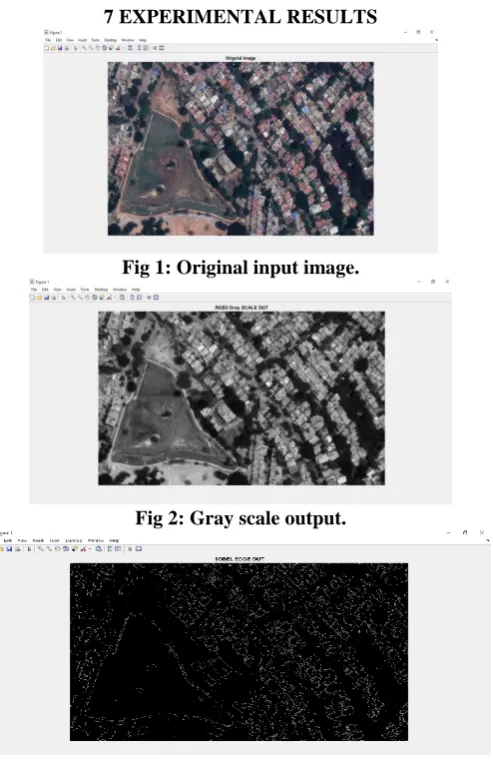
7 EXPERIMENTAL RESULTS
Fig 1: Original input image.
[image:7.595.177.424.157.538.2]Fig 2: Gray scale output.
Fig 3: Sobel Edge detection.
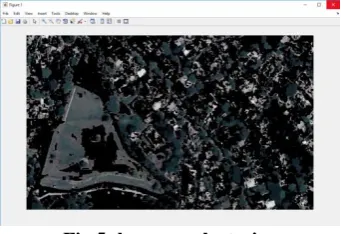
In fig 4, k-implies order is a system for vector limitation, at first from picture setting up, that is notable for group examination in fact mining. k-implies bundling hopes to divide thoughts into k
[image:7.595.212.379.617.729.2]sets in which each mark has a point with the bundle of quick mean, filling in as a model of the gathering. This upshot is doling out the dope space into particular subset.
110
In Fig 5, the issue is gauging troublesome (NP-hard); in any case, there are productive nosy calculations that are habitually resorted and focalize rapidly to a nearby ideal. These are typically like the desire expansion calculation for blends of Gaussian disseminations through a verbose detersion advent utilized by both k-mean
and Gaussian distributions. Moreover, they utilize group focuses to display the information; in any case, k-mean bunching tends to discover groups of practically identical geographical degree, whilst the desire amplification instrument enables groups to
[image:8.595.212.383.217.334.2]have diverse shapes.
Fig 5: k-means clustering
In Fig 6, the calculation has a free tie-up to the k-closest neighbour taxonomy; a well-known regiment for peculiarizing that is regularly mistaken for k-mean in light of the k in the tag. One can affix the 1-closest bystander kind on the
group focuses got by k-mean to order new information into the current bunches. This is avowed as imminent centre allotting or Rocchio calculation
.
Fig 6: k-means clustering
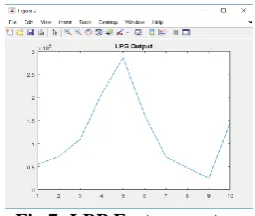
In fig 7, The LBP consolidate vector, in its base complex packaging, is made in the running with way:
• Divide the explored window into cells (e.g. 16x16 pixels for every cell).
• For every picture element in a cell, adjust the pel with every single one of its 8 acquaintance (to the other side best, left-concentrate, left-base, right-best, and so on.). Take after the element along a circle, i.e. clockwise or counter-clockwise. • Where inside dot's respect is more recognizable than the bystander's respect, state "0" and a novel, state "1". This gives a 8-digit
coordinated number (which is all around changed over to decimal for settlement).
• Compute the histogram, through phone, of the rehash of each "number" happening (i.e., each mix of which components are more modest and which are more recognizable than inside). This histogram can be viewed as a 256-dimensional part vector.
[image:8.595.214.383.434.550.2]111
Fig 7: LBP Feature vector.In fig 8, the histogram of arranged angles (HOG) is a component descriptor utilized as a part of PC vision and picture preparing with the end goal of question discovery. The procedure includes events of inclination introduction limited parts of a picture. This strategy is like that of edge introduction histograms, scale-invariant element change descriptors, and shape settings, yet varies in that it is figured on a thick framework of
consistently divided cells and utilizations covering nearby differentiation standardization for enhanced exactness. In this work they concentrated on person on foot identification in static pictures, in spite of the fact that from that point forward they extended their tests to incorporate human discovery in recordings, and to an assortment of regular creatures and vehicles in static symbolism.
Fig 8: The HOG Feature Descriptor.
In fig 9, Canny edge revelation is a framework to isolate essential conclusion from verity of faculty objects and fundamentally diminish the measure of proof to be taken care of. It has been extensively associated in different PC vision systems. Vigilant has found that the necessities for the utilization of end distinguishing proof on omnifarious sight structures are for the most part near. In this way, a verge distinguishing proof response for address these necessities can be executed in a broad assortment of conditions. The general criteria for
curb acknowledgment include: Revelation of brim with low error rate, which suggests that the acknowledgment should definitely get anyway numerous frontiers showed up in the photo as could sensibly be normal. The berm point recognized from the director should definitely restrain on the point of convergence of the brink. A given edge in the photo should simply be checked once, and where possible, picture clatter should not make
false strands.
[image:9.595.234.359.365.476.2] [image:9.595.70.469.530.753.2]112
In Fig 10, there is a lot of enthusiasm about close infrared, both from a logical and masterful viewpoint. Here are a few applications that utilization NIR flag got from a computerized camera.
In photography appropriate, NIR conveys sharp pictures with now and then an emotional standpoint. Surely, sky and water are dark, mists remain white, and vegetation turns out to be brilliant. The explanation behind these distinctions with the noticeable are, extremely different. In vegetation this is because of the phone helix of the leaves; water assimilates close invisible radiation; mists are made out of beads that disseminate
approaching light as indicated by Mie's law (the edge of diffusing is free of the wavelength); sky is dim for a similar reason it is blue: little particles scramble light however the dissipating point is corresponding to the reverse fourth energy of the wavelength (Rayleigh dispersing), in this manner blue is the most scattered and close unseeable the slightest.
[image:10.595.244.355.530.640.2]Rayleigh dispersing is likewise the motivation behind why, in scene pictures, far off items wind up obscured and have a blue shading cast. This marvel, barometrical fog, is relatively missing from close infrared pictures, yielding cloudiness free pictures that have a bigger optical profundity.
Fig 10: NIR and NDVI output.
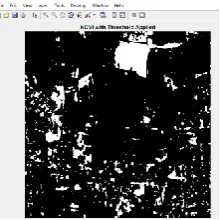
In Fig 11, imaging frameworks might be furnished with picture sensors for catching data about episode irradiation powers in the obvious and invisible groups of radiance. The methods for catching data about obvious ray might be inadvertently and unfortunately affected by unseen beam. Also, the ways for catching data about unseeable light might be inadvertently and unfortunately impacted by unmistakable sconce.
Capacity and preparing hardware may amend for the undesired impact of invisible and unmistakable incandescence on the flag information from the obvious and sensors, separately. The redress might be resolved or picked in luminescence of a discovery of the illuminant kind of the imaged scene. The amendment may on the other hand be general, and pertinent to pictures of scenes lit up by any illuminant.
Fig 11: Image obtained after applying NDVI with threshold.
In Fig 12, the bit of the electro-magnetic limit apparent by the human sight architecture is for the most part called the "obvious range" and limits from (around) 380 to 700nm in distance. The close infrared set is found soon after the red distance and includes orientations that limit from 700 to
113
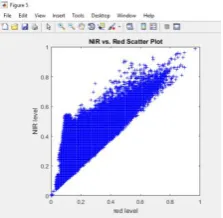
Fig 12: NDVI Output.In Fig 13, High-recurrence data, in any case, has a tendency to be saved, so a close infrared picture is effortlessly translated by a human eyewitness. This can be found in the RGB in additive to illustration, half of it is in the obvious, half in the close unseen
pel. The NIR reaction is totally autonomous of the shading, however the 3D shape and shadow edges are unmistakably observed in any case. More insights about invisible pixels are given.
Fig 13: NIR v/s Red Scatter Plot.
In this fig 14, deliberately picking colours additionally enables one to outline hotter, or cooler, attire. Everybody realizes that, in the daylight, a dark article of clothing is hotter to wear since it ingests the daylight; however this is genuine just to a degree. The dark color ingests (with conviction)
[image:11.595.241.354.549.671.2]the piece of the daylight that is discharged in the unmistakable range. The sun having a critical discharge in the close infrared, there would thus be able to be an extensive contrast in how warm a dark thing feels relying upon its NIR retention.
Fig 14: NIR Band.
In this fig 15, while the hominid visual framework can't catch close infrared radiation, an aperture can. Close invisible ray movies have been created by assorted producers however their reuse has dependably been constrained to devotees as a result
114
Fig 15: Visible Red Band.In fig 16, advanced cameras' sensors are so delicate to close unseen ray that a "hot mirror", a passage that gives just evident corona a chance to pass, is set before them with a specific end goal to avoid NIR defilement of the unmistakable waft. Accordingly, a change of the lens hood is expected to evacuate the reflector and preempt it by either clear glass or an unmistakable blocking pipe and we selected to usurp the speculum by clear glass to
have the capacity to hence catch either noticeable or NIR pictures by putting a NIR-blocking or obvious blocking conduct before the focal point. Altering a view finder in such a way isn't excessively troublesome given you have tolerance little connectors. Likewise bring toothpick, they make life significantly simpler with a portion of the
[image:12.595.241.354.378.486.2]strip connectors.
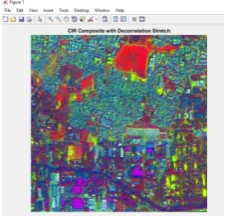
Fig 16: CIR Composite with De-correlation Stretch.
In Fig 17, the quantity of needful advances and the last ameliorated pictures are resolved in view of the CIR maneuverer. In historicalness, this avenue applies a shedding rigmarole on the
pictures, in which one or a few questions in the picture are unmistakably showed utilizing structural conduct; subsequently give a fitting picture to empiricism.
115
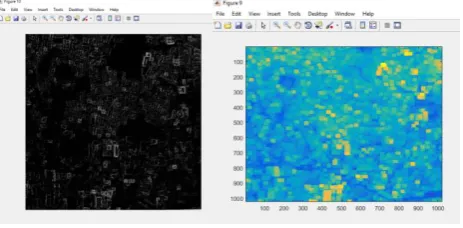
Fig 18: Displaying the Percentage of Vegetation present in the taken area.In Fig 19, this errand utilizes 8-band symbolism to distinguish a wide range of biota in a picture. The procedure creates a veil layer to supplement NDVI or other flora records. Excrescence gravel is an obstruction to the
smattering of multispectral remote detecting pictures for geographical usage, particularly in thickly dormancy territories. So as to improve the basic land data in such territories, it is alluring to smother the reflectance segment of ontogeny.
Fig 19: 8-band imagery to identify all types of vegetation in an image.
In Fig 20, the approach utilizes a three-advance process that contains:
(i) masking of desolate or inadequately vegetated territories utilizing a standardized contrast vegetation file (NDVI) veil with a specific end goal to hold their unique otherworldly data through the ensuing preparing;
(ii) Applying a constrained invariance method to subtract the ghostly reaction of vegetation just in vegetated territories; and
(iii) Combining the handled vegetated territories with the conceal desolate or inadequately vegetated zones took after by a histogram balance to wipe out the distinctions in shading scales between these two sorts of zone. An assessment in view of examination with the land delineate that the constrained invariance system brings about huge upgrade of the geographical data in the prepared picture appeared above pictures.
Fig 20: NDVI Masking.
In Fig 21, Automatic discovery and depiction of social highlights from flying pictures is of incredible functional enthusiasm for various use, for example, cartography and photograph hindsight. Of the numerous social highlights to be distinguished, structures are maybe the most notable recluse of their bulk and many-sided
[image:13.595.183.415.561.675.2]116
the ethereal pictures are ordinarily exceptionally mind boggling and contain countless in the scene. This makes the issue of question identification more troublesome, from numerous points of view,
[image:14.595.83.513.171.422.2]than in production line or indoor conditions. We trust that the systems exhibited here for building discovery likewise help give a few experiences in how to approach the more broad issues.
Fig 21: Building Detection.
Fig 22: Counting the number of Buildings in a taken area by setting desired Threshold. Fig 23: Number of buildings found and the Performance efficiency.
In this fig 24, The CIR information contained in the Landmap chronicle was caught utilizing one of two instruments VexelUltraCams, and ADS40 from Leica Geosystems GIS and Mapping, LLC. The Vexcel is outline based; taking pictures of the Earth Surface in the typical way of an advanced camera each edge as a different picture. While the ADS40 uses a push floor brush strategy, i.e. an arrangement of sensors examining underneath as the plane flies.
Real nature pictures are normally RGB, Red Green and Blue, However on account of CIR symbolism as we have here the Bands are masterminded NIR, R, G. This is the reason all vegetation looks red in these pictures, as the picture being made up on the screen is ruled by the NIR. As should be obvious
the Blue band has been supplanted, by the NIR, furthermore the Sequence of the groups has changed. Check the way a similar picture looks as the changed groups are apportioned.
Qualities - CIR
• High determination computerized flying pictures 50 cm determination
• Images are caught while plants are in full leaf in any case, you should focus on the Metadata provided with the pictures to discover the time of Capture of these pictures as they were gathered more than quite a while.
• Tiles naming Convention take after Ordnance Survey lattice referencing
[image:14.595.193.404.633.737.2]• Data accessible in GeoTiff Format.
117
Fig 25: In this figure, it shows the Buildings detected in rectangular boxFig 26: In this figure, after conversion binary format, building found area of interest.
118
Fig 29: One of the training sample images took for training a model.Fig 30: 64 input layers with hidden layer and one output layer in Neural Network Model using levnbergmarquadt technique.
8. CONCLUSION
In this project, we developed a novel building location strategy “Buildingidentification utilizing improvedHOG– LBP highlights & region refinement forms usingCNN” which utilizes linked HOG and LBP highlights utilizing a novel
separation work in the preparation and testing of the CNN classifier.
119
The new limit gives a critical lift to the execution of the HOG– LBP indicator.
At last, the proposed strategy deal with precisely identify building limits. The locale refinement strategy depends on the consequence of a picture division method, the utilization of the yield of the HOG– LBP locator and the work of novel scoring measurements to decide the areas that will probably relate to structures.
Applying the proposed technique to the Athens dataset of satellite pictures uncovers the predominance of the HOG– LBP locator over other question and building discovery approaches.
The region refinement system, albeit fruitful in its motivation to enhance the pixel-based execution of our building locator, faces issues keeping the high review of the HOG– LBP detector, as a couple of structures are lost all the while. Likely the majority of these issues can be relieved by a precise picture division technique.9. FUTURE ENHANCEMENT
This Project has exceptionally huge extension later on. The venture can be actualized on intranet in future.
Project can be refreshed in not so distant future as and when necessity for the same emerges, as it is exceptionally adaptable as far as development.
With the proposed system "Building identification utilizing improvedHOG– LBP highlights & region refinement forms using CNN", a prepared and completely useful customer input is currently ready to be overseen and thus run the whole work in a vastly improved, exact and mistake freeway.
The future degree for the undertaking is expansion of TensorFlow, an open-source programming library for dataflow programming over a scope of errands into the current venture.
TensorFlow is a representative math library, and is additionally utilized for machine learning applications, for example, neural systems.
TensorFlow is utilized for both research and generation at Google. Among the applications for which TensorFlow is the establishment, are mechanized picture subtitling programming,for example, DeepDream. RankBrain currently handles a generous number of hunt questions, supplanting and supplementing conventional static calculation based indexed lists.
REFERENCES
[1] L. Theng, “Automatic building extraction from satellite imagery,” Eng.Lett., vol. 13, no. 3, pp. 1–5, Nov. 2006.
[2] K. Karantzalos and D. Argialas, “A region-based level set segmentation for automatic detection of man-made objects from aerial and satellite images,” Photogramm. Eng. Remote Sens., vol. 75, no. 6, pp. 667–677, 2009. [3] D. Singh, R. Maurya, A. Shukla, M. Sharma,
and P. Gupta, “Building extraction from very high resolution multispectral images using NDVI based segmentation and morphological operators,” in Proc. Students Conf.Eng. Syst., Mar. 2012, pp. 1–5.
[4] T. Hermosilla, L. Ruiz, J. Recio, and J. Estornell, “Evaluation of au-tomatic building detection approaches combining high resolution im-ages and LiDAR data,” Remote Sens., vol. 3, no. 6, pp. 1188–1210, 2011. [5] B. irmacek and C. Unsalan, “Urban-area and
building detection using SIFT keypoints and graph theory,” IEEE Trans. Geosci. Remote Sens., vol. 47, no. 4, pp. 1156–1167, Apr. 2009.
[6] B. irmacek and C. Unsalan, “A probabilistic framework to detect build-ings in aerial and satellite images,” IEEE Trans. Geosci. Remote Sens., vol. 49, no. 1, pp. 211–221, Jan. 2011. [7] P. Hough, “Method and means for recognizing
complex patterns,” U.S.Patent 3 069 654, Dec. 18, 1962.
[8] T. Kim and J. Muller, “Development of a graph-based approach for building detection,”
Image Vision Comput., vol. 17, no. 1, pp. 3– 14, 1999.
[9] D. Haverkamp, “Automatic building extraction from IKONO imagery,” in Proc. Amer. Soc. Photo Remote Sens., 2004, pp. 23–28.
[10]D. Woo, Q. Nguyen, Q. N. Tran, D. Park, and Y. Jung, “Building detection and reconstruction from aerial images,” in Proc. Int. Soc. Photogramm.Remote Sens. Congr., Beijing, China, 2008, pp. 713–718.
[11]S. Vinson, L. Cohen, and F. Perlant, “Extraction of rectangular buildings in aerial images,” in Proc. Scand. Conf. Image Anal., 2001.
120
toward automatic and accurate building detection,” IEEETrans. Geosci. Remote Sens., vol. 47, no. 1, pp. 133–144, Jan. 2009.
[13]O. Benarchidet al., “Building extraction using
object-based classification and shadow information in very high resolution multispectral images, a case study: Tetuan, Morocco,” Can. J. Image Process. Comput. Vision, vol. 4, no. 1, pp. 1–8, Jan. 2013. [14]S. Kluckner and H. Bischof, “Image-based
building classification and 3d modeling with super-pixels,” in Proc. Int. Soc. Photogramm. Remote Sens.Photogramm. Comput. Vis. Image Anal., 2010, pp. 291–296.
[15]A. hackelford and C. Davis, “A combined fuzzy pixel-based and object-based approach for classification of high-resolution multispectral data over urban areas,” IEEE Trans. Geosci. Remote Sens., vol. 41, no. 10, pp. 2354–2363, Oct. 2003.
[16]Z. Sheng-hua, H. Jian-jun, and X. Wei-xin, “A new method of building detection from a single aerial photograph,” in Proc. 9th Int. Conf. SignalProcess., Oct. 2008, pp. 1219– 1222.
[17]C. Senaras, M. Ozay, and F. T. Y. Vural, “Building detection with decision fusion,”
IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens., vol. 6, no. 3, pp. 1295–1304, Jun. 2013.
[18]D. Chai, W. Forstner,¨ and M. Y. Yang, “Combine Markov random fields and marked
point processes to extract building from remotely sensed images,” in Proc. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci., 2012, pp. 1219–1222.
[18]O. O. Karadag,˘ C. enaras, and F. T. Y. Vural, “ egmentation fusion for building detection using domain-specific information,”
IEEE J. Sel. TopicsAppl. Earth Observ. Remote Sens., vol. 8, no. 7, pp. 3305–3315, Jul. 2015.
[19]J. Femiani, E. Li, A. Razdan, and P. Wonka, “ hadow-based rooftop segmentation in visible band images,” IEEE J. Sel. Topics Appl. EarthObserv. Remote Sens., vol. 8, no. 5, pp. 2063–2077, May 2015.
[20]D. Konstantinidis, T. Stathaki, V. Argyriou, and N. Grammalidis, “A prob-abilistic feature fusion for building detection in satellite images,” in Proc.10th Int. Conf. Comput. Vision Theory Appl., 2015, pp. 205–212. [21]N. Dalal and B. Triggs, “Histograms of
oriented gradients for human detection,” in
Proc. IEEE Conf. Comput. Vision Pattern Recognit., Jun. 2005, vol. 1, pp. 886–893. [22]T. Ojala, M. Pietikainen, and D. Harwood,