Australian Journal of Basic and Applied Sciences
AUSTRALIAN JOURNAL OF BASIC AND
Open Access Journal
Published BY AENSI Publication © 2016 AENSI Publisher All rights reserved
This work is licensed under the Creative Commons Attribution http://creativecommons.org/licenses/by/4.0/
To Cite This Article: SheelaRani P., B. Malavika and R. Sumitha & Appl. Sci., 10(1): 159-164, 2016
Neighbor Discovery Protocol
1
SheelaRani P., 2B. Malavika and 3R. Sumitha
1Assistant Professor, Department of Information Technology
2Department of Information Technology, Panimalar Institute of Technology, 3B.E final year Department of Information Technology,
Address For Correspondence:
SheelaRani P., Assistant Professor, Department of Information Technology, Panimalar Institute of Technology,Chennai E-mail: [email protected]
A R T I C L E I N F O Article history:
Received 10 December 2015 Accepted 28 January 2016 Available online 10 February 2016
Keywords:
Sensor nodes-neighbor discovery
protocol- mobile adhoc networks- Quorum System –latency
Neighbor discovery, is the abilit of the steps and a fundamental building f ind one potential target node within
Central servers can be engaged, proximity
ability of discovering nearby devices in one's wireless communication.
control and clustering protocols to enhance
convenience of local neighbor discovery at any instance. While sometimes the centralized server might be unavailable for various reasons. Generally,
protocol. The first contest is energy efficiency. .It shrinks m life time of the battery. The second challenge is effectiveness
only guarantee successful detection between neighboring nodes, but also realize which can be improved by quorum system. In
immediately if they turn to a wake instant synchronization can be achieved through devices. Thus, how to deal with a synchronization protocol.
As glob al clock synchronizat neighbor discovery system for duty cyclic quorum systems. Our algorithm discovery latency in theory at desir trade of between power consumption
Australian Journal of Basic and Applied Sciences, 10(1) January 2016, Pages: 159-164
AUSTRALIAN JOURNAL OF BASIC AND
APPLIED SCIENCES
ISSN:1991-8178 EISSN: 2309-8414 Journal home page: www.ajbasweb.com
© 2016 AENSI Publisher All rights reserved
This work is licensed under the Creative Commons Attribution International License (CC BY). http://creativecommons.org/licenses/by/4.0/
SheelaRani P., B. Malavika and R. Sumitha., Neighbor Discovery Protocol in Mobile Adhoc Network
Neighbor Discovery Protocol in Mobile Adhoc Network
Sumitha
of Information Technology, Panimalar Institute of Technology,Chennai-600123 Panimalar Institute of Technology, Chennai-600123,India
Department of Information Technology, Panimalar Institute of Technology, Chennai-600123, India
Assistant Professor, Department of Information Technology, Panimalar Institute of Technology,Chennai
A B S T R A C T
In mobile adhoc networks, the emerging propinquitybased applications have led to the need for highly effective and energy-efficient neighbor discovery prot
step is Neighbor discovery is used to establish communication links between sensor nodes; it becomes a fundamental building block for wireless sensor networks. Earlier the neighbor discovery was working on same frequency. However the escal
mobile devices communication faces trials to neighbor discovery problem. In this paper we implement a neighbor discovery system Based on quorum system, which can bound the latency in multichannel developments with low power consumptions. It pr 35% reduction in power latency compared to u-connect and we derive the worst case latency for symmetric duty cycles using Diff Code. In symmetric case, the maximum worst-case progress is up to 65%.
INTRODUCTION
ity for each node find the neighboring nodes in the physica ding block in configuring and managing adhoc net works. A within its an no uncomment range before initializing any
proximity-based applications' potential can be better exploited nearby devices in one's wireless communication. This information is
enhance the performance and efficiency of the networks.
neighbor discovery at any instance. While sometimes the centralized server might be
Generally, there are three provocations in designing such The first contest is energy efficiency. .It shrinks maximum utilization of the power
life time of the battery. The second challenge is effectiveness, i.e., the neighbor discovery protocol should not successful detection between neighboring nodes, but also realize a short latency
which can be improved by quorum system. In an ideal case, neighboring nodes can wake instant onerously upon synchronized clocks. Without
through GPS. Never the less, it is v a s t energy-consuming
synchronization is the third challenge to the design of a neighbor discovery
ation is not required, we propose an algorithm to con duty- cycled multi-channel mobile by utilizing the rotati
orithm can guaranteed the worse-case discovery latency desired duty cycle. Mean while, our scheme produces enhanced
on and discovery latency.
164
Neighbor Discovery Protocol in Mobile Adhoc Network. Aust. J. Basic 600123,India
India
Assistant Professor, Department of Information Technology, Panimalar Institute of Technology,Chennai-600123,India.
based applications have led to the efficient neighbor discovery protocols. The first is used to establish communication links between sensor nodes; it becomes a fundamental building block for wireless sensor networks. Earlier the neighbor discovery was working on same frequency. However the escalation of the mobile devices communication faces trials to neighbor discovery problem. In this paper we implement a neighbor discovery system Based on quorum system, which can bound the latency in multichannel developments with low power consumptions. It provides connect and we derive the worst case latency for symmetric duty cycles using Diff Code. In symmetric case, the maximum
physical propinquity, is one works. Anode f irst has to y data communications.
exploited providing the
is needed by to apology networks. Users can have the neighbor discovery at any instance. While sometimes the centralized server might be
such a neighbor discovery aximum utilization of the power and increases the neighbor discovery protocol should not latency at the same time, can discover each other Without a central server, the consuming for mobile design of a neighbor discovery
We assess our method through performs U-Connect in terms of powe
II System Model:
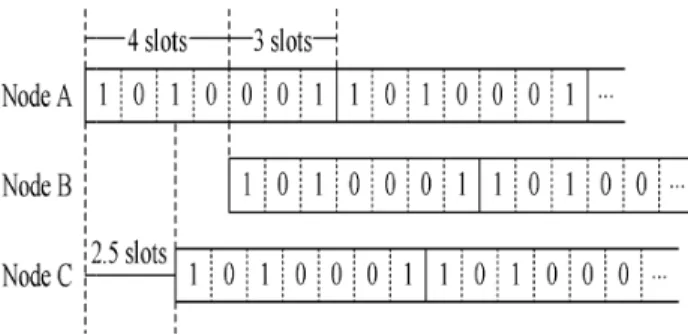
Time is divided into equalized slots. Owing to restricted energy budget, each node performs duty operations. That is, it sleeps for the duration of most slots, while revolving awake during a few remaining slots, which are called active slots. To be specific, in a sleeping slot, a node does not send or receive, and consumes negligible energy. In contrast, in an active slot, a node communicates beacons at the opening and the end, respectively, and listens for other nodes' transmissions in between. Each beacon contains the MAC address of its sender. A node discovers its neighbors by decoding the received beacons and extracting the contained MAC addresses. Thus, in general, two neighboring nodes can discover each othe
Moreover, the neighbor discovery problem involves: the symmetric case, where all the nodes have the same duty cycle.
Fig. 1: Example: the slot offset between two nodes.
In deterministic neighbor discovery, there is alternate its state periodically between active and sleeping A pattern code determines an active
equals the number of active slots in a cycle. This is to say, the duty cycle is decided by the length and the weight of pattern code.
Fig. 2: Overflowed active slots. (a) Overflowing schemes. (b) Active slot nonalignment
We implement over flowed active slots to avoid the rare case when the slot boundaries of nodes are perfectly aligned, which makes two adjacent
Fig. 2(a), an active slot is made either to
slot is increased by, while the preceding slot is shortened correspondingly.
Evaluation:
A. Design of asynchronous neighbor discovery
The design of asynchronous neighbor discovery permits some
networks or devices that will dynamically familiarize their operating frequency ideal communication environment, the
transmission range. We have first provided the problem formulation neighbor discovery problem in duty
h theoretical analysis. Evaluation results show that our wer-latency product and fraction of findings under severa
Time is divided into equalized slots. Owing to restricted energy budget, each node performs duty operations. That is, it sleeps for the duration of most slots, while revolving awake during a few remaining slots, which are called active slots. To be specific, in a sleeping slot, a node does not send or receive, and consumes negligible energy. In contrast, in an active slot, a node communicates beacons at the opening and the end, nodes' transmissions in between. Each beacon contains the MAC address of its sender. A node discovers its neighbors by decoding the received beacons and extracting the contained MAC addresses. Thus, in general, two neighboring nodes can discover each other when their active slots overlap. Moreover, the neighbor discovery problem involves: the symmetric case, where all the nodes have the same
Example: the slot offset between two nodes.
In deterministic neighbor discovery, there is an established active-sleep pattern scheduling a node to alternate its state periodically between active and sleeping. We formulate the active-sleep pattern as a 0
A pattern code determines an active-sleep pattern Containing slots in a cycle. The weight of code with length the number of active slots in a cycle. This is to say, the duty cycle is decided by the length and the weight
Overflowed active slots. (a) Overflowing schemes. (b) Active slot nonalignment.
active slots to avoid the rare case when the slot boundaries of
nodes are perfectly aligned, which makes two adjacent active slots at two nodes no overlapping. As depicted in Fig. 2(a), an active slot is made either to start a little bit earlier or to end later. As a result, the
slot is increased by, while the preceding slot is shortened correspondingly.
synchronous neighbor discovery:
neighbor discovery protocol is presented in this section.
nodes with no prior clock synchronization information to discover other networks or devices that will dynamically familiarize their operating frequency above dissimilar
environment, the discovery is completed in bounded time only when nodes are within We have first provided the problem formulation and then introduced the synchronous scovery problem in duty-cycled multichannel mobile adhoc networks.
our method reliably out ral network conditions.
Time is divided into equalized slots. Owing to restricted energy budget, each node performs duty-cycled operations. That is, it sleeps for the duration of most slots, while revolving awake during a few remaining slots, which are called active slots. To be specific, in a sleeping slot, a node does not send or receive, and consumes negligible energy. In contrast, in an active slot, a node communicates beacons at the opening and the end, nodes' transmissions in between. Each beacon contains the MAC address of its sender. A node discovers its neighbors by decoding the received beacons and extracting the contained MAC r when their active slots overlap. Moreover, the neighbor discovery problem involves: the symmetric case, where all the nodes have the same
sleep pattern scheduling a node to sleep pattern as a 0–1 code. eight of code with length the number of active slots in a cycle. This is to say, the duty cycle is decided by the length and the weight
active slots to avoid the rare case when the slot boundaries of neighboring active slots at two nodes no overlapping. As depicted in or to end later. As a result, the width of an active
161 SheelaRani P. et al, 2016
Australian Journal of Basic and Applied Sciences, 10(1) January 2016, Pages: 159-164
B. Construction of Quorum-Based Neighbor Discovery System in Duty-Cycled Multichannel Mobile adhoc networks:
Here we present an algorithm which uses a quorum system to construct a neighbor discovery system for duty-cycled multichannel mobile WSNs namely, we need to build a set of BSS and CSS of period.
Algorithm 1: Quorum-based neighbor discovery system construction algorithm:
Input:
a, b, a channel set P={0,1, . . . , b−1},W={0,1, . . . , a−1}, a quorum system Q under Wand a binary variable d, d = 0 demonstrates that we need to construct BSS n, otherwise, to construct CSS m;
Output: QS; (1)Q S =0;
(2) for i = 0to(|Q|−1)do (3) for x = 0to(b −1)do (4) for j = 0to(a −1)do (5) if j ∈ githen
(6) if c = 0then (7) y (j+x⋅b)=1; (8) e =e bss; (9) else (10) y(j+x⋅b)=1; (11) e =ecss=x; (12) end if (13) end if (14) ifz∉githen
(15) y(j+x⋅b)=0;
(16)e= er, randomly elected from the set
{0,1, . . . , b−1}; (17) end if (18) end for (19) end for
(20)N = N∪n, M= M ∪m, Q S = N∪M;
(21) end for
C. Construction of BSS:
First, we present the algorithm to create BSS set, which could be easily modified to construct CSS set as well. For this we assume that each BSS is consists of 'b' segments, where each segment has been allocated with 'a' time slots. Therefore, the period of each BSS T=a x b and a=7 is defined as we have the following construction process. (1)First, under a quorum system we construct a universal set W={0,1,2,3,4,5,6}
For the sake of uniformity, when the node turns off its radio, we schedule the network to work on channel. Practically implementing synchronous neighbor discovery does not make difference between these two cases because it makes no sense to list an functional channel for a node when its radio is turned off.(2)Repeat the prior procedure to make beacon transmission schedule for each of other segments and it should be noted that in the remaining segment, the time slot catalog should be the modulo over for assembling the previous two equations .(3)Repeat step for each of the other quorums and to construct other three BSSs too. The four BSS‘s are the elements of the set, where each sequence has a period of. One quorum is used to construct a beacon transmission schedule in. Thus, we can imply that there are two matching quorums used to construct and individually. Every beacon transmission schedule in has the same period as a consequence of the connection property of and join at least times on a specific channel in period off.
D. Construction of CSS:
E. Quorum-Based Asynchronous Neighbor Discovery System in Duty-Cycled Multichannel Mobile Adhoc Networks:
Here we introduce an asynchronous neighbor discovery system which does not in volve universal clock synchronization constructed on the rotation closure property of cyclic quorum system. The main detached is to design an asynchronous BSS set and CSS set , so that overlapping by at least half of a time slot for every NDP of period and even the time slot boundaries are misaligned by an arbitrary amount.
We extend the concept of the rotation closure property so that it can applied to our asynchronous neighbor discovery system.
F. Construction of Quorum-Based Asynchronous Neighbor Discovery System:
Here, we spread out the Algorithm 1 created on cyclic quorum system presented to achieve the objective. Mostly, in steps of Algorithm 1, we have constructed a relaxed cyclic (m,n)-different set sets ={b1,b2, . . . ,bk}, , then we construct a cyclic quorum system Q which consists of group of cyclic quorum sets set gj= {b1+j,b2+j, . . . ,bk+j} modn, where j∈{0,1, . . . , n−1}.
For example, we construct a relaxed cyclic (7,3)-different set s={1,2,4} and a cyclic quorum system Q under S ,after building the cyclic quorum system , we construct BSS set and CSS set using the same procedures of step by step in Algorithm 1. We refer to this construction algorithm for quorum-based asynchronous neighbor discovery system as Algorithm 2.
Algorithm 2: Quorum-based asynchronous neighbor discovery system construction algorithm:
Input:
a, B, c, a channel set D={0,1, . . . , B−1},and a binary variable n, n = 0 determines that we need to construct BSS k, other wise, to construct CSS l;
Output: QS; (1) Q S =0;
(2) construct a relaxed cyclic(a,c)-diference sets ={b1,b2, . . . ,b};
(3) construct a cyclic quorum system Q ={q0,q1, . . . ,qm}using the relaxed cyclic (a, c)- diference sets; (4)for= 0to(|G|−1)do
(5) for x = 0to(B −1)do (6) for j= 0to(a −1)do (7)if j∈gI then
(8)if e = 0 then (9) y (j+x⋅B) =1; (10)d =d bss; (11)else (12)y(j+x⋅B)=1; (13)d =dcss=x; (14)end if (15)end if (16)ifz∉gi then
(17)y(j+x⋅B)=0;
( 1 8 ) d = dl, randomly selected from the set
i. {0,1, . . . , B−1}; (19) end if
(20) end for (21)end for
(22)K = K∪k, L = L∪l, Q S = K∪L; (23) end for
Due to the rotation closure property of the cyclic quorum system, it is obvious to infer that the neighbor discovery system of period erected by Algorithm 2 fulfills the rotation closure property.
Fig. 3 demonstrates the worst-case latency bound of various neighbor discovery protocols restricted by symmetric duty cycle.
B. One-to-One Neighbor Discovery Latencies:
163 SheelaRani P. et al, 2016
Australian Journal of Basic and Applied Sciences, 10(1) January 2016, Pages: 159-164
Fig. 3: Worst-case latency bound versus duty cycle.
• Discovery Latencies in Symmetric Case:
In this set of simulations, we set the duty cycle at 5% and compare the performance of two different Diff-Codes to existing protocols. We set the cycle lengths of the two Diff-Codes at 280 and 320, the pair of primes in Disco at (37, 43), the prime of U-Connect at 31, the probing period of Searchlight-S at 40 slots, and the active probability of Birthday protocol at 5%.
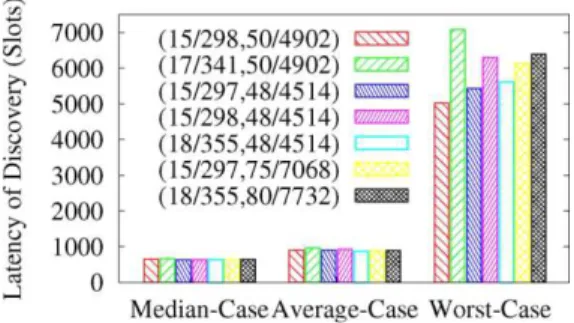
Fig. 4: One-to-one discovery latencies of multiple Diff-codes series with symmetric duty cycles 5%–1%.
IV. Discussion:
A. MAC/PHY Compatibility:
Most deterministic neighbor discovery protocols, including (A) Diff-Codes in this work, design the active-sleep patterns that schedule the state transformation of nodes between active and active-sleeping. The counter increases by one every time-slot, and the node can turn active at corresponding slot indices. In practice, each node can store a whole. A Dif f-Codes series locally, and turn to a Diff-Code in the series according to its requirement on the duty cycle. The counter will be tuned accordingly. In mobile adhoc networks, neighbor discovery is conducted among wireless devices.
Conclusion:
In this paper, We have explored a systematized study of designing highly effective and energy-efficient neighbor-detection protocols in mobile adhoc networks. We have derived a constricted lower bound for the worst-case latency by exploiting active slot nonalignment and designed Diff-Codes for the case of symmetric duty cycle proximity using quorum system. Specifically, in the one-to-one scenario, Diff-Codes can reduce the worst-case latency by up to 65% and achieve a median gain of around 30% and we have also included the quorum system for increase in power efficiency and consist of beacon scheduling and channel look over organizations. It significantlyreducesthediscoverylatencywithdesireddutycyclebyupto 92% when we compared to other techniques such as U-Connect, Search -Light etc.
REFERENCES
Kravets, R.H., 2012.“Enabling social interactions of the grid ,”IEEE pervasiveComputing, 11(2): 8–11. Eisenman, S.B., E. Miluzzo, N.D. Lane, R.A. Peterson, G. Ahn, and A.T. Campbell, 2009. “Bike Net: amobile sensing system for cyclist experien cemapping,”ACM Transactionson Sensor Networks, 6: 1-6.
Lane, N.D., E. Miluzzo, H. Lu, D. Peebles, T. Choudhury and A.T. Campbell, 2010. “A survey of mobile phone sensing, ”IEEE Communications Magazine, 48(9): 140–150.
Duttaand, P., D.E. Culler, 2008. “ Practical a synchronous neighbor discovery and rendezvous for mobile sensing applications, ”in Proc. SenSys, 71–84.
Evans, T., H. Mann, 1951. “On simple difference sets,”Sankhyā, Indian J. Statist., 11: 357–364.
Hao Cai, T. Wolf, 2015. "On 2-way neighbor discovery in wireless networks with directional antennas",Computer Communications (INFOCOM), IEEE Conference on, 702 – 710.
Mir, Z.H. and Woo-Sung Jung, Young-Bae Ko, 2015."Continuous Neighbor Discovery Protocol in Wireless Ad Hoc Networks with Sectored-Antennas",Advanced Information Networking and Applications (AINA), 2015 IEEE 29th International Conference on, 54 - 61
Parth I Patel "Efficient Neighbor Discovery in Wireless Ad Hoc Networks",2015. International Journal of Advanced Research in Computer Science and Software Engineering, 5: 391-394.
Wei Sun and Zheng Yang, Keyu Wang, Yunhao Liu, 2014. "Hello: A generic flexible protocol for neighbor discovery", INFOCOM, Proceedings IEEE, 540 – 548.