2017 2nd International Conference on Computer Science and Technology (CST 2017) ISBN: 978-1-60595-461-5
Research on Obstacle Detection of UAV Based
on HSV Color Space
Qiang WU
1,a, Yun-xue MA
2,band Xu-wen LI
3,c1,2College of Information and Communication Engineering, Faculty of Information
Technology, Beijing University of Technology, Beijing, 100124, China
3College of Life Science and Bioengineering, Beijing University of Technology,
Beijing, 100124, China
aemail:[email protected], bemail:[email protected],
cemail: [email protected]
Keywords:HSV, Image Segmentation, Connected Component, Collision Detection.
Abstract. In order to improve the ability of the UAV to identify the threatened obstacle
in color images accurately, this paper studies an obstacle detection scheme based on visual model. According to the characteristics that brightness has nothing to do with the color information in the HSV color space; a new image segmentation algorithm for HSV space is proposed. Through full integration of the H, S, V component information for a single channel image, integration image will be split with OTSU method. The algorithm is simple to calculate and has a good segmentation effect. The obstacle area extracted by the image segmentation algorithm is marked by using connected component analysis. And finally, through collision detection to find obstacles, which are threatened to UAV flight. Research shows that this program can improve the accuracy of obstacle detection in UAV flight.
Introduction
Obstacle detection is one of the important links in UAV autonomous navigation. In order to achieve navigation in an unknown environment, the UAV must be able to identify the insurmountable obstacles in the surrounding scene. There are a number of methods that have been successfully applied to obstacle detection, such as laser ranging, ultrasound, millimeter-wave radar, and visual-based detection. Obstacle detection based on visual model refers to the detection of information such as the shape, position and attitude of the object in the surrounding by using camera. After the processor has processed the information, it can identify the obstacle. Compared with these methods, the advantage of the visual method is that it belongs to the passive measurement, the concealment is better and the price is lower. Therefore, the visual-based approach is a hot topic for scholars to study.
obstacle. But the intersecting test method of the separation axis not only requires polygonal fitting to the edge of the object, but also needs to project the object to be detected in the normal direction of each edge, the calculation is more cumbersome, and the scheme is generally suitable for convex polygon target. In view of the shortcomings of the above scheme, this paper studies an obstacle detection method based on HSV color Space. The program mainly includes image segmentation, connected component analysis, UAV projection and collision detection. The scheme improves the image segmentation algorithm, enhances the segmentation effect, and fully detects the collision threat of the obstacle.
Image Segmentation
When performing obstacle detection, it is necessary to separate the foreground (corresponds to the target to be used in practice) and background (other areas of non-target in the image) from the image that has been de-noised. So we need to separate sky area from other scenes [3]. Only in this way can UAV access the obstacle information within the field of view and provide the basis for the adjustment of the forward direction. Therefore, in order to extract the obstacle completely, Image segmentation becomes a key in the aspect of obstacle detection for a UAV.
Principle of Image Segmentation
Image segmentation is to divide one image into a number of non-intersecting sub-regions based on the composition of the image structure and demand characteristics. These sub-regions are, in a sense, a connected set of pixels with common attributes, such as gray values, histograms, contours, textures, colors, and so on.
Image Segmentation Algorithm.
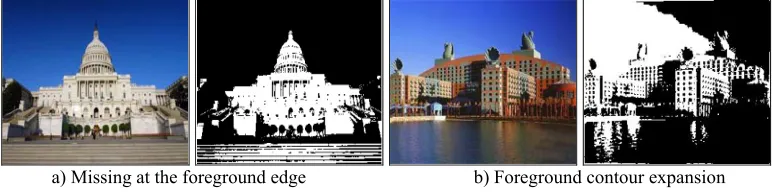
There are many image segmentation algorithms, such as threshold-based segmentation, region-based segmentation, edge-based segmentation. As the UAV requires a higher real-time on the algorithm, generally need an intuitive and simple threshold segmentation method. So the OTSU is the most commonly used. The traditional OTSU discards the color information of the image, converts the filtered image into a grayscale image, select the threshold that maximizes the variance between classes, divides the image into foreground and background parts. But the segmented image in some cases will miss some edges of obstacles, making obstacle information incomplete. As shown in Fig. 1 a), it is also possible to erroneously divide the background into a foreground, leading to the outline of the object become larger. As shown in Figure 1 b).In this paper, the algorithm is improved to make full use of the color information of the image.
[image:2.612.113.504.578.674.2]a) Missing at the foreground edge b) Foreground contour expansion Figure 1. Image segmentation by traditional OTSU.
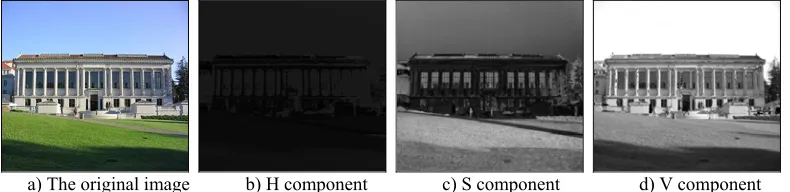
eyes is different. RGB color space can be converted into HSV color space by a simple and fast nonlinear transformation, so this paper selects HSV color space which is more fit human visual system [4]. For UAV flight, the purpose of threshold segmentation in obstacle detection is to extract sky area from the image. As can be seen from the image, the brightness of sky area is usually less than some objects in the field of view, but the difference of color is often large. In order to improve the adaptability of segmentation algorithm and image segmentation effect, this paper proposes to segment image by merging color and brightness information. HSV color space contains three components: hue (H), saturation (S), brightness (V). The brightness is substantially unrelated to the color information of image. The hue represents the property of color; Saturation indicates the purity of color; Brightness indicates the shading of color. The transformation of the image from RGB color space to HSV color space is shown in the following equation where the values of R, G and B are in [0, 1].
(1)
The H, S and V components of the transformed HSV image are analyzed respectively. As shown in Figure 2. In sunny days, the sky is mostly blue, the image with HSV model description, usually the sky area of the H and S components larger. However, due to the influence of occlusion, there is a lack of light in some areas of the field of view, which may result in an increase in the H component of some of the foreground areas in the image. The H component of the region is similar to the sky region, but the S and V components of the region are relatively small. So we can select the smaller value of the image H, S component, and appropriate to add brightness information for fusion, and can distinguish between the sky area and the obstacle area effectively.
[image:3.612.110.505.518.614.2]
a) The original image b) H component c) S component d) V component Figure 2. Original image in sunny day and HSV component images.
synthesized using the value of S*V, which can effectively increase the difference between the sky area and the prospect area.
[image:4.612.112.501.102.201.2]
a) The original image b) H component c) S component d) V component Figure 3. Original image in cloudy day and HSV component images.
So we can make full use of the complementary information of H, S and V component. The color information determined by the H and S components and the luminance information determined by the V component are integrated into a new single channel image. The pixel values of the sky region in the fused image differ greatly from the pixel values in the non-sky region. In order to meet the need of the sunny and cloudy day, we can integrate the dark channel of color information and the luminance information into a new single-channel image. The formula is as follows:
V S S
H
I =min( , )×255+min( ,α)× . (2)
Here, H, S are the normalized color components; V ranges from 0 to 255;
α
is a small constant (In this paper,α
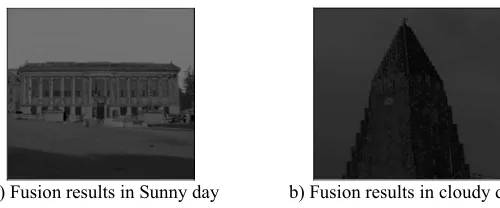
is 0.35), Limiting the influence of non-sky regions where the brightness and saturation are large in the final fusion image. The weighting of the V component not only reduces the decisive effect of the V component in the image segmentation, but also compensates for the defect of the H component becoming larger due to lack of light. Figure 4 shows the sunny and cloudy images produced using equation (2). It is clear from the figure that the pixel values in the sky area are larger and the pixel values in the non-sky area are smaller.
a) Fusion results in Sunny day b) Fusion results in cloudy day Figure 4. Fusion results.
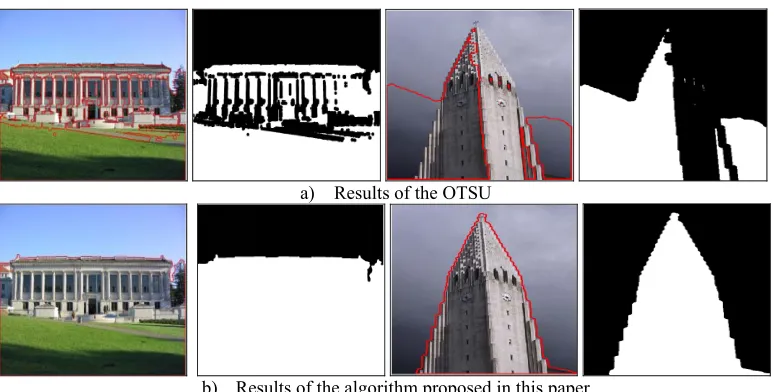
[image:4.612.179.429.464.568.2]segmentation. Figure 5 is the comparison result of the traditional threshold segmentation method and the improved segmentation method based on color information and luminance information fusion.
a) Results of the OTSU
[image:5.612.111.498.112.308.2]
b) Results of the algorithm proposed in this paper
Figure 5. Comparison of traditional methods and methods in this paper.
From these experimental results, we can see that the algorithm proposed in this paper distinguishes the background sky area and the foreground obstacle area effectively, and separate the obstacles and sky better in the sunny and cloudy days.
Detection of Threatened Obstacle
Some of the obstacle areas obtained by image segmentation can not pose a threat to the UAV's forward. So it is necessary to determine the threat of obstacles further. The method used in this paper is to first extract the connection domain in the image and label the area, and then project the UAV onto the image plane, search for the obstacle area label included in the projection rectangle, record the label of the obstacle with the threat of collision, remove the collision-free area.
Connected Component Analysis
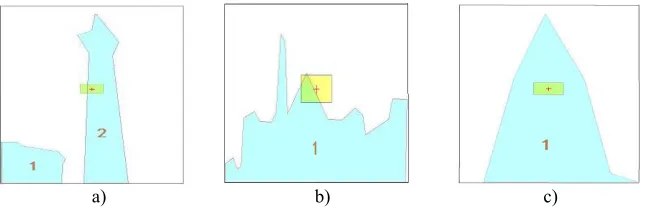
A connected area is a collection of pixels that have some of the same characteristics (The gray levels of the pixels in the region are less than or equal to the specific thresholds, and the pixels in the same connected domain are connected to each other) [5]. The identification and label of single or multiple obstacle areas in the image are mainly obtained by scanning and analyzing the binary image. The algorithm in this paper uses the 4 neighborhood labeling rules. We scan an image from top to bottom, from left to right, mark the pixels with the same characteristics, and numbering the foreground objects in the divided image. The number in Fig. 6 a), b), c) is the label of the connected area in the segmented image.
Project UAV Onto Image
distance and the pixel space distance. The yellow area in Figure 6 a), b), c) is the projection model of the UAV in the image.
Collision detection
Collision detection determines whether it is or not a collision occurs between different objects usually by detecting whether a given object intersects.In order to reduce the amount of computation, the projection area of the UAV in the image is scanned horizontally to detect the obstacle area which intersects the projection area, and the disordered obstacle area is deleted, and then we can know which of the surrounding scenes is a threatened to the UAV flight. As shown in Fig. 6, after image preprocessing and segmentation, a) has two obstructions 1 and 2 marked through the Connected component analysis, the projection area of the UAV only intersects the obstacle area 2, and area 1 will be deleted; b) and c) have only one obstacle is threatened to the UAV flight.
[image:6.612.146.470.258.367.2]
a) b) c) Figure 6. Schematic diagram of obstacle detection.
The experimental results show that the obstacle detection method based on the HSV color space can effectively detect the obstacle in the direction of the UAV.
Conclusion
This paper investigates a method of detecting obstacles in UAV flight. The core of the program is to use HSV color space to analyze images, extract the component of color information and integrate into images to be split. The image segmentation algorithm is suitable for sunny image, as well as some cloudy situation. After the image is divided and masked, the UAV projection information is used to detect and identify obstacles that pose a threat to UAV flight. The experimental results show that the algorithm can overcome disturbance of brightness effectively in obstacle detection, improve the effect of obstacle extraction in traditional OTSU, divide obstacles and the sky accurately, which improves the accuracy of obstacles detection. These lay a foundation for the study of autonomous obstacle avoidance and path planning in UAV navigation.
References
[1] P. Agrawal, A. Ratnoo, D. Ghose. Vision, Vision Based Obstacle Detection and Avoidance for UAVs Using Image Segmentation, AIAA Guidance, Navigation, and Control Conference. (2015) 0848.
[3] T. G. McGee, R. Sengupta, K. Hedrick. Obstacle detection for small autonomous aircraft using sky segmentation, Robotics and Automation, 2005. ICRA 2005. Proceedings of the 2005 IEEE International Conference on. IEEE (2005) 4679-4684. [4] Z. K. Huang, D.H. Liu. Segmentation of color image using EM algorithm in HSV color space, Information Acquisition, 2007. ICIA'07. International Conference on. IEEE (2007)316-319.