doi:10.4236/ica.2011.21001 Published Online February 2011 (http://www.SciRP.org/journal/ica)
Distributed
H
Consensus of High-Order Multi-Agents
with Nonlinear Dynamics
*
Jianzhen Li
School of Automation, Nanjing University of Science and Technology, Nanjing, China
E-mail: jianzhenli1983@yahoo.com.cn
Received January 20, 2011; revised February 12, 2011; accepted February 13, 2011
Abstract
This paper deals with the distributed consensus problem of high-order multi-agent systems with nonlinear dynamics subject to external disturbances. The network topology is assumed to be a fixed undirected graph. Some sufficient conditions are derived, under which the consensus can be achieved with a prescribed H
norm bound. It is shown that the parameter matrix in the consensus algorithm can be designed by solving two linear matrix inequalities (LMIs). In particular, if the nonzero eigenvalues of the laplacian matrix ac-cording to the network topology are identical, the parameter matrix in the consensus algorithm can be de-signed by solving one LMI. A numerical example is given to illustrate the proposed results.
Keywords:Consensus, Multi-Agent Systems, Nonlinear Dynamics, External Disturbances
1. Introduction
The consensus problem of multi-agent systems has been researched extensively in recent years. This is because of its widely application in much areas such as flocking [1-2], synchronization of coupled oscillators [3], forma-tion control of mobile robots [4-5], distributed computa-tion [6] and informacomputa-tion fusion in wireless sensor net-works [7]. The object of consensus control is to design consensus protocol such that the group of agents can asymptotically agree upon certain quantities of interest based on information received from their neighbors.
Most of the work on the consensus problem focuses on the multi-agent systems with first-order dynamics. In particular, [8] deals with the first-order multi-agent sys-tems with switching topologies and time delays in a con-tinuous setting. The fist-order multi-agent systems with switching topologies is investigated in [9] in a dis-crete-time setting. The consensus problem has also been investigated from many other aspects such as reference signals [10], asynchronous sampling time [11], and so on. Recently, the consensus problem of second-order multi- agent systems has been investigated extensively [12-14]. In particular, the consensus problem of second-order multi-agent systems with nonlinear dynamics was
inves-tigated in [15]. The nonlinear dynamics can be taken as the potential functions or the desired final dynamics of the agents. There is also some work on the consensus problems of high-order multi-agent systems [16-17].
Generally speaking, the consensus cannot be achieved accurately if there are external disturbances. To deal with this problem, the H consensus problem is considered [18-21]. It is shown that for undirected network topolo-gies, the desired parameter matrix in the consensus algo-rithm can be designed by solving two LMIs, which relate to the system matrix of the agents and the eigenvalues of the laplacian matrix corresponding to the network topol-ogy. The H2 consensus problem was investigated in [22].
In the aforementioned work on the H or H2 con-sensus problem, the nonlinear dynamics was not consid-ered. As is mentioned in [14-15] much multi-agent sys-tems have nonlinear dynamics. Motivated by this, this paper considers the H consensus problem of high- order multi-agent systems with nonlinear dynamics. To the best of the author's knowledge, this problem has not been considered in the literature. Some sufficient condi-tions will be derived, under which the consensus can be achieved with a prescribed H norm bound. It will be shown that the parameter matrix in the consensus algo-rithm can be designed by solving two LMIs, which relate to the system matrix of the agents and the smallest and
*This work was supported by the National Natural Science Foundation
the biggest nonzero eigenvalue of the laplacian matrix corresponding to the network topology. In particular, if the nonzero eigenvalues of the laplacian matrix accord-ing to the network topology are identical, the parameter matrix in the consensus algorithm can be designed by solving one LMI.
2. Preliminary Notations and Problem
Formulation
Let
, ,
be a weighted undirected graph of o r d e r N, w h e r e
1,,N
i s t h e n o d e s e t .
is a set of unordered pairs of nodes, and is the adjacency matrix. An undirected path is a se-quence of edges in a undirected graph of the form
v , vi1 i2
,
v , vi2 i3
,, where v vi1, i2 Anundi-rected graph is called connected if for any two nodes of the graph, there exists a path that follows the edges of the graph. The adjacency matrix is a nonnegative matrix
N N d aij
satisfying aii 0 for any i,
aij aji 0, if
j i, , and aij 0 if agents j and i are not adjacent. The Laplacian matrix of thegraph is defined as N N
ij
l
with ii ij
j i
l a
and lij a ,ij i j. We can see that satisfies0
1
and 1T0
where 1
1,,1
T. For matri-ces M and N, MN denotes their Kronecker product. It is well known that if the undirected network topology is connected, the lapalacian matrix corresponding to
has N1 positive eigenvalues and a simple zero eigenvalue.
Consider a group of N agents with the following dy-namics:
1 2 ,
i i i i i
x Ax Bu B B f x (1)
where
m,i
x t
pi
u t are, respectively, the state, the control input of agent i,
mi t
is the external disturbance which belongs to 2
0,
, and
m i
f x
is a nonlinear function.
Assumption 1: There exists a positive scalar such that
,, .
T
i j i j
T i j i j
m i j
f x f x f x f x
x x x x
x x
Remark 1: Assumption 1 is similar to the Assumption 1 in [14]. It is a Lipschitz-type condition satisfied by many systems.
Definition 1: We say algorithm ui solves the con-sensus problem if
1
0, , . N
j i
j
x
x t i
N
Definition 2: We say algorithm ui solves the con-sensus problem with H norm bound if the fol-lowing two conditions are satisfied:
1) Algorithm ui solves the consensus problem if 0;
2) If z00, the following inequality is satisfied:
2 2
2
0 z dt 0 dt,
where
1
1
1 ,
,
, N
j
i i
j
T
T T
N
T
T T
N
x z x
N
z z z
and z0 is the initial value of z.
The object of the H consensus control is to design consensus algorithms such that the consensus problem is solved for a prescribed H norm bound.
Lemma 1: (Schur complement [23]) Let S be a sym-metric matrix of partitioned form S Sij with
11 ,
r r
S ( )
12
r n r
S and ( ) ( )
22
n r n r
S Then, 0
S if and only if S110,
1 22 21 11 12 0, S S S S or
equivalently 1
22 0, 11 12 22 21 0.
S S S S S
Lemma 2: For matrices A, B, C, D with appropriate dimensions, one has
AB
T ATBT,
CD AC
BD
and
AB
C A C B C3. Results
In this section, the H consensus problem of multi- agent systems with nonlinear dynamics will be investi-gated. Considers the following state feedback consensus algorithm:
1
N
i ij i j
j
u t K a x x
(2)With (2), system (1) becomes
1 2
1
, N
i i ij i j i i
j
x Ax BK a x x B B f x
(3)
which can be written in a compact form as
1
2
,
N N
N
x I A L BK x I B
I B f
(4)
where 1 N ,
T T T
x x x and ( ) (1 ) .
T T
N T f f x f x
3
m
,z HI x (5)
where HN N with
1 , 1 , . ij N i j N H i j N
It can be seen that HIN11T N, H2H, ,
T T NH N
1 0 H1N 0N and H H .
Lemma 3: There exists an orthogonal matrix N N
U with last column 1N N H such that
1 1 1
, .
* 0 * 0
N n N
T I T
U HU U LU
0 0
From (4) and (5) we have
1 2 1 2 . mz H I x
H A L BK x H B
H B f
H A L BK z H B
H B f
(6)
Define 1
N U U N 1
, from Lemma 3 we have
1 1 1
T
N
U HU I and 1 1 .
T
U LU Define
UTIm
z1 , T T T N
we have
1
2
1 1 1
1 1
1 2
1 1
* 0 * 0
. T
m m
T T
m m
N n N
T T
T T
N N
U I H A L BK U I z
U I H B U I H B f
I
A BK
U H U H
B B f
0 0 0 0 (7)
It can be seen that N 0. So 0 if and only if 0
i
, i1,,N1.Define 1 1 .
T
T T
N
From (7) we have
11 1
1 2
.
N
T T
I A BK
U H B U H B f
(8)
Note that the eigenvalues of are 2,,N. There exists an orthogonal matrix FN 1 N1 so
that
2, ,
.T
N
F F diag
Define
1 1T
T T T
m N
F I
we have
1 2
1 1 1 2
, ,
.
N N
T T T T
I A diag BK
F U H B F U H B f
(9)
Noting that z zT T T T , we conclude that algorithm (2) solves the consensus problem with
H norm bound if and only if system (9) is
asymp-totically stable with T , where T denotes the H norm of the transfer function matrix from to .
Theorem 1: Suppose the undirected graph is connected and the nonzero eigenvalues of are
2, , N
. Using algorithm (2), the consensus is
achieved with H norm bound if there exists a symmetric positive definite matrix X and a matrix W
such that the LMIs
1 2 2 1 2 0 0 0, 0 0 1 0 0 1 T T m m m
B XB X
B I B I X I (10) 2, ,
i N hold, where
.T T T
i
AX XA BW W B
In this case, the parameter matrix in (2) can be chosen as 1
.
KWX
Proof: Assume that the undirected graph is con-nected, we have 20. Suppose there exists a symmet-ric positive definite matrix X and a matrix W such that (10) hold. Define WP X1, K WX1. Pre- and
post-multiply both sides of (10) by
0 0 0
0 0 0
0 0 0
0 0 0
m m m P I I I
one can get
1 2 2 1 2 0 0 0, 0 0 1 0 0 1 T m T m m m m
PB B I
B P I
B I I I (11) 2, ,
i N hold, where
T T T
i
PA A P PBK K B P
.
For i, i3,,N1, there exists 0i1 such that i2
1
N. It is easy to see that (11) alsoholds for i3,,N1. By Lemma 1 we know that (11) holds if and only if
2 2 1
2 1 1 0 T m T m
B B I PB
B P I
(12)
1 1
2
1 1 1
, N
T
N N m
I PB
I PB I
where
2 11 2 2 1
, , . T T N N m T T
N N m
I diag PBK K B P
I B B I PA A P I
From (12) we know that 0.
Next prove that the consensus is achieved if 0. If 0, (9) becomes
1 2 1 2 , , . N N T TI A diag BK
F U H B f
(13)
Consider the Lyapunov function
1
.T N
V I P
Because P symmetric positive definite, we have V
is symmetric positive definite with respect to . Taking derivative of V
along (13), we have
1 1 1 21 1 2
1
2
1 2
2
2 , ,
2 , , 2 . T N N T N N
T T T
N
T T
N
T T N
T T T
V I P I A
I P diag BK
I P F U H B f
I PA A P
diag PBK K B P
F U H B f
(14)
Because U is an orthogonal matrix, one has
1 1
T
T N N
N
I U U U U
N N
1 1
It follows that
1 1 1. T
N
U U I Then we have
1 2
1 1 2 2
2
1 2 2
2
.
T T T
T T T T
T
m
T T T
N m
F U H B f
F U U F B B
f H I f
I B B f H I f
(15) Notice that
1 1 1 1 T m N Ti j i j
i j i
N T
i j i j
i j i
f H I f
f x f x f x f x
N
x x x x
N
. T m T Tx H I x
z z
(16)
From (14)-(16) we have
1 21 2 2
1 2 2
2 , , , , . T T N T T N
T T T
N
T T T
N m
T T N
V
I PA A P
diag PBK K B P
I B B
I PA A P B B I
diag PBK K B P
(17)
It follows from (12) that 2 2
1
0,T
m
B B I
which, together with (17) implies that V
is negative definite with respect to . It then follows that 0 asymptotically. From the analysis above we know the consensus can be achieved.Assume that 0. Taking derivative of V
along (9), we have
1 12 1 1
1 2
1 2 2
2 1 1 2 , , , , 2 . T N N T T N T T
T T T
N m
T T N
T T T
V I P I A
diag BK F U H B
F U H B f
I PA A P B B I
diag PBK K B P
F U H PB
(18) Assume that z00 , which implies that 00 , where 0 is the initial state of . It follows that
2 2 2
0 0
2 2 2
0 0
2 0
1 2 2
2 1 1 0 , , 2 , T T
T T T
N m
T T N
T T T
T
z dt dt
V dt V V
I PA A P B B I
diag PBK K B P
F U H PB dt
dt
(19)where T TT,
V00 is the initial value of
V , and
1 1 2 1 1 . T T T NmF U H PB
HU F PB I
5
By Lemma 1 we know that 0 if and only if
2
1 1 1 1
2
2
1 1 1
2
, ,
1
( )
, ,
1
0.
T T N
T T T
T T N
T N
diag PBK K B P
F U H PB HU F PB
diag PBK K B P
I PB B P
(20)
Also by Lemma 1 we know that (20) is equivalent to 0
, which has been proved in the above analysis. So we have that
is symmetric negative definite. It fol-lows from (19) that2 2 2
0 z dt 0 dt 0.
Therefore, the consensus is achieved with H norm
bound . The proof is completed.
Sometimes, the laplacian matrix has N1 identical nonzero eigenvalues, i. e. 02N. Take the complete graph for example. Consider the complete graph with N nodes. The laplacian matrix is chosen as
1 1 1
1 1 1
.
1 1 1
N
N N N
N
N N N
N
N N N
By some calculations we have the eigenvalues of
are 0, 1 , , 1
1 1
N N . In this case, we have the fol
lowing corollary.
Corollary 1: Suppose the undirected graph is connected and the nonzero eigenvalues of satisfy
2 N.
Using algorithm (2), the consensus is achieved with H norm bound if there exists a symmetric positive definite matrix X and a matrix W
such that the LMI
1 2
2 1
1
2
0 0
0,
0 0
1
0 0
1 T
T
m
m
m
B XB X
B I
B I
X I
(21)
holds, where 1 .
T T T
AX XA BM M B
In this
case, the parameter matrix in (2) can be chosen as 1.
K WX
Proof: Assume that there exists a symmetric positive definite matrix X and a matrix W such that (21) holds.
Define
2
1 .
XM W
It follows that
1 2
2 1
2
0 0
0
0 0
1
0 0
1 T
T
m
m
m
B XB X
B I
B I
X I
Holds for i2. From Theorem 1 we have the con-sensus is achieved with H norm bound , and the parameter matrix can be chosen as KWX1.
Remark 2: From Corollary 1 one has that if the non-zero eigenvalues of the laplacian matrix are identical, the
H performance is determined by 2 and the system matrices of the agents. It has no relationship with the number of the agents.
4. A Numerical Example
Consider a multi-agent systems consisted of N nodes with the following second-order
, sin 0.5 ,
i i i i i i i x v v u x
where sin 1
1
i t
is the external disturbance. This multi-agent system can be written in the form of (1) with
1 2
0 1 0 1 0 0 0
, , , .
0 0 1 0 1 0 1
A B B B
The communication topology is given in Figure 1. The laplacian matrix is chosen as
1 1 0 0
1 2 1 0
.
0 1 2 1
0 0 1 1
The eigenvalues of are 0, 0.5858, 2 and 3.4142. Solving the LMIs in (10) with 20.5858 , 4
3.4142, 0.5 and 1.29, we can get
0.0455 0.6688
, 0.1 2605.7 .
0.6688 23.2996
X W
From Theorem 1 we know that K can be chosen as
1
2844.2 193.5 .
[image:5.595.306.498.82.182.2]KWX
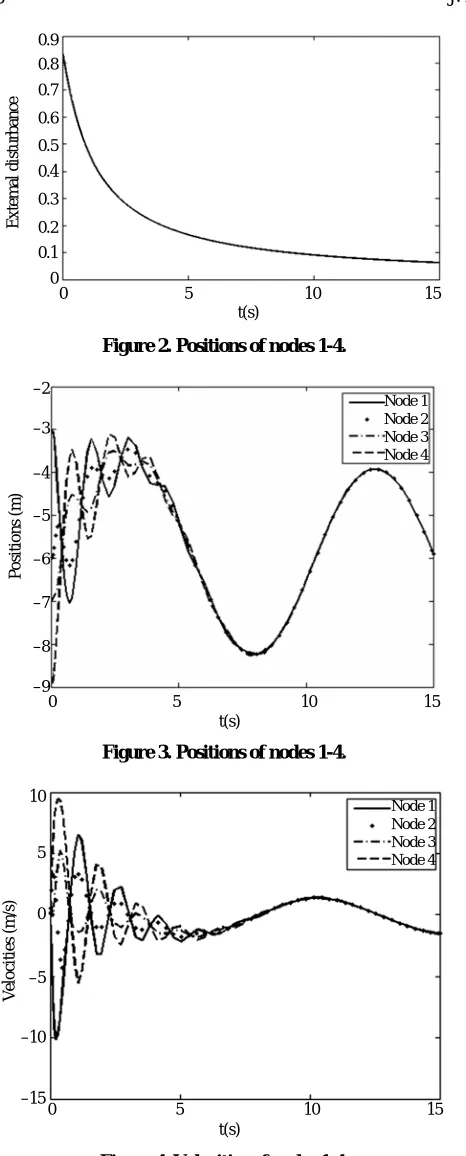
Figure 2 shows the trajectory of the external distur-bance. Figures 3 and 4 show, respectively, the position and velocity responses of nodes 1 4.
[image:5.595.107.288.585.656.2]0.9
0 5 10 15 t(s)
E
x
te
m
al dis
tur
ba
nc
e
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
[image:6.595.60.293.64.642.2]0
Figure 2. Positions of nodes 1-4.
–2
0 5 10 15 t(s)
Po
sit
io
n
s (m)
–3
–4
–5
–6
–7
–8
–9
Node 1 Node 2 Node 3 Node 4
Figure 3. Positions of nodes 1-4.
10
0 5 10 15 t(s)
V
elo
ci
ti
es
(m
/s
)
Node 1 Node 2 Node 3 Node 4
–15 –10 –5 5
0
Figure 4. Velocities of nodes 1-4.
5. Conclusions
The H consensus problem has been investigated in this paper, for the high-order multi-agent systems with nonlinear dynamics. Sufficient conditions have been
given in the forms of LMIs, under which the H con-sensus problem can be solved. The parameter matrix in the consensus algorithm can be designed by solving two LMIs. If the nonzero eigenvalues of the laplacian matrix according to the network topology are identical, the pa-rameter matrix in the consensus algorithm can be de-signed by solving one LMI. The numerical simulation confirmed the proposed results.
6. References
[1] T. Vicsek, A. Czirok, E. Jacob, I. Cohen and O. Schochet, “Novel Type of Phase Transitions in a System of Self- Driven Particles,” Physical Review Letters, Vol. 75, 1995, pp. 1226-1229.doi:10.1103/PhysRevLett.75.1226
[2] R. Olfati-Saber, “Flocking for Multi-Agent Dynamic Systems: Algorithms and Theory,” IEEE Transactions on Automatic Control, Vol. 51, 2006, pp. 401-420.doi:10.11 09/TAC.2005.864190
[3] H. Su, X. Wang and Z. Lin, “Synchronization of Coupled Harmonic Oscillators in a Dynamic Proximity Network,” Automatica, Vol. 45, 2009, pp. 2286-2291.doi:10.1016/ j.automatica.2009.05.026
[4] J.A. Fax and R. M. Murray, “Information Flow and Co-operative Control of Vehicle Formations,” IEEE Trans-actions on Automatic Control, Vol. 49, 2004, pp. 1465- 1476.doi:10.1109/TAC.2004.834433
[5] F. Xiao, L. Wang, J. Chen and Y. Gao, “Finite-Time Formation Control for Multi-Agent Systems,” Auto-matica, Vol. 45, 2009, pp. 2605-2611. doi:10.1016/j.automatica. 2009.07.012
[6] L. Xiao and S. Boyd, “Fast Linear Iterations for Distrib-uted Averaging,” Systems and Control Letters, Vol. 53, 2004, pp. 65-78.doi:10.1016/j.sysconle.2004.02.022
[7] R. Olfati-Saber and J. S. Shamma, “Consensus Filters for Sensor Networks and Distributed Sensor Fusion,” Pro-ceedings of the IEEE Conference on Decision and Con-trol, 2005, pp. 6698-6703.
[8] R. Olfati-Saber and R. M. Murray, “Consensus Problems in Networks of Agents with Switching Topology and Time-Delays,” IEEE Transactions on Automatic Control, Vol. 49, 2004, pp. 1520-1533.doi:10.1109/TAC.2004. 834113
[9] W. Ren and R. W. Beard, “Consensus Seeking in Multi- agent Systems under Dynamically Changing Interaction Topologies,” IEEE Transactions on Automatic Control, Vol. 50, 2005, pp. 655-661. doi:10.1109/TAC.2005. 846556
[10] W. Ren, “Multi-Vehicle Consensus with a Time-Varying Reference State,” Systems Control Letters, Vol. 56, 2007, pp. 474-483.doi:10.1016/j.sysconle.2007.01.002
[11] M. Cao, A. S. Morse and B. O. Anderson, “Agreeing Asynchronously,” IEEE Transactions on Automatic Con-trol, Vol. 53, 2008, pp. 1826-1838.doi:10.1109/TAC. 2008.929387
[image:6.595.61.520.75.661.2]Co-7
ordination in Networks of Agents with Second-Order Dynamics,” IET Control Theory and Applications, Vol. 3, 2009, pp. 957-970.doi:10.1049/iet-cta.2008.0263
[13] W. Yu, G. Chen and M. Cao, “Some Necessary and Suf-ficient Conditions for Second-Order Consensus in Multi- agent Dynamical Systems,” Automatica, Vol. 46, 2010, pp. 1089-1095.doi:10.1016/j.automatica.2010.03.006
[14] W. Yu, G. Chen, M. Cao and J. Kurths, “Second-Order Consensus for Multi-Agent Systems with Directed To-pologies and Nonlinear Dynamics,” IEEE Transactions on Systems, Man, and Cybernetics-Part B, Vol. 40, 2010, pp. 881-891. doi:10.1109/TSMCB.2009.2031624
[15] Q. Song, J. Cao and W. Yu, “Second-Order Lead-er-Following Consensus of Nonlinear Multi-Agent Sys-tems via Pinning Control,” Systems and Control Letters, Vol. 59, 2010, pp. 553-562.doi:10.1016/j.sysconle.2010. 06.016
[16] Z. Li, Z. Duan, G. Chen and L. Huang, “Consensus of Multi-Agent Systems and Synchronization of Complex Networks: a Unified Viewpoint,” IEEE Transactions on Circuits and Systems-I, Vol. 57, 2010, pp. 213-224. doi:10.1109/TCSI.2009.2023937
[17] J. H. Seo, H. Shim and J. Back, “Consensus of High- Order Linear Systems using Dynamic Out-Put Feedback Compensator: Low Gain Approach,” Automatica, Vol. 45, 2009, pp. 2659-2664.doi:10.1016/j.automatica.2009.07. 022
[18] P. Lin, Y. Jia and L. Li, “Distributed Robust H Con-sensus Control in Directed Networks of Agents with Time-Delay,” Systems and Control Letters, Vol. 57, 2008, pp. 643-653.doi:10.1016/j.sysconle.2008.01.002
[19] Z. Li, Z. Duan and L. Huang, “H Control of Net-worked Multi-Agent Systems,” Journal of Systems Sci-ence and Complexity, Vol. 22, 2009, pp. 35-48. doi:10.1007/s11424-009-9145-y
[20] Y. Liu and Y. Jia, “Consensus Problems of High-Order Multi-Agent Systems with External Disturbances: An
H Analysis Approach,” International Journal of Ro-bust and Nonlinear Control, Vol. 20, 2009, pp. 1579- 1593.doi:10.1002/rnc.1531
[21] Y. Liu and Y. Jia, “H Consensus Control of Multi- Agent Systems with Switching Topology: a Dynamic Output Feedback Protocol,” International Journal of Control, Vol. 83, 2010, pp. 527-537.doi:10.1080/0020 7170903267039
[22] G. Young, L. Scardovi and N. Leonard, 2010. “Robust-ness of Noisy Consensus Dynamics with Directed Com-munication,” Proceedings of the American Control Con-ference, 2010, pp. 6312-6317.