71
Available online at www.ijiere.com
International Journal of Innovative and Emerging
Research in Engineering
e-ISSN: 2394 - 3343 p-ISSN: 2394 - 5494
Differential GPS: A Comprehensive Study
Deepan Bhavsar1a, Himanshu Patel2b and Hardik Modi3b aStudent, CHARUSAT, Anand, India
bAssi.Prof, CHARUSAT, Anand, India
ABSTRACT:
The Global Positioning System is used commonly in various types of application area. It provides horizontal accuracy in several meters. This accuracy is inadequate for some application area, it needs much higher accuracy in the range of centimeters. Differential GPS is an augmentation method which overcomes this drawback of Global Positioning System (GPS) and provides Higher accuracy and errorless positioning, which used in critical applications like Air-craft landing, City surveying, and many more. The intention of this paper is widespread study of Differential GPS and its various technique. Furthermore Differential GPS provides a very accurate positioning which makes it the most dominant method in very near future.
Keywords: Differential GPS, Pseudo range, GPS, Carrier phase tracking, Code base technique.
I. INDROCTUION
In ancient times people uses different techniques for positioning. On the land, they were using different benchmarks like mountains, rivers, trees, etc. Furthermore, they were using the position of the sun, the moon and different stars to determine the position while travelling through sea and oceans. After passing of several time, satellite age, when satellite positioning system took place of those less accurate conventional methods. Global Navigation Satellite System (GNSS) is the system which uses satellites for the purpose for navigation and positioning, furthermore different country have their own navigation system. Global Positioning System was developed by US Department Of Defense(DOD) for military purpose. The performance of the basic GPS system has been augmented by the technique of Differential GPS (DGPS) for military as well as civilian uses [14-17]. After some time it was made available for general public use for navigation purpose. To prevent the misuse of it, US DOD put some intentional error of several meters. Due to which and some other errors GPS provides accuracy of 100m horizontally. In the contrast, some application needs much higher accuracy, Differential GPS (DGPS) is an augmentation method which removes different errors and provides higher accuracy. Higher quality GPS localisation is available by using methods such as Differential or Real-Time Kinematic GPS (DGPS, RTK)[18]. Differential GPS can be applied in position level or in range level [9]. DGPS uses an extra receiver, Reference Receiver at a known location, for error computation. Due to the spatial correlation of errors in the same vicinity, it can remove errors for the observed range for Rover Receiver and provides accurate position.
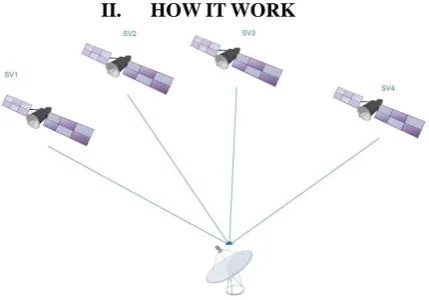
II. HOWITWORK
72 We all know that it needs four satellites to compute position of GPS receiver. The positions of a satellite at different points in an orbit are related, to the first order, by the Newton's Law of motion [13]. Satellite broadcasts navigation signals which travels at the speed of light. Furthermore, difference of reception time at receiver and transmitting time from satellite gives the travel time of signal. Moreover, from the velocity of signal and travel time GPS receiver computes range between satellite and itself. So, for the position computation the range is taken as a radius and satellite as a center of sphere. First of all, with the first satellite it have one sphere so that one can say that the position of GPS receiver is somewhere on the sphere. Second of all, after having one more sphere from second satellite, one can say that it is somewhere on the intersection circle of two sphere. But still the position is not computed, so that third sphere from third satellite provides two points of intersection. GPS receiver is situated at one of the both points. Here, one point will be on the earth and the another one will be somewhere in space. So, actual position can be computed with the help of fourth satellite's sphere. it will give the actual position of the GPS receiver. The question is why at least four satellites are required four unknown from the pseudo range equation:
ƍ = ((XS-XR)2 + (YS-YR)2 + (ZS-ZR)2)1/2 (1) Where,
(XS, YS, ZS ) is co-ordinates of satellite. (XR, YR, ZR) is co-ordinates of receiver. ƍ is pseudo range.
III. DIFFERENTTYPESOFERRORSOURCES
In the GPS system one cannot achieve accurate position due to various kind of errors experienced by the navigation message. These errors distorts it and give the difference of several meters. The major sources of errors are listed below:
Selective Availability Errors
Multipath
Receiver Noise and clock drift
Ionospheric Propagation Delay
Tropospheric Propagation Delay
Ephemeris Error
Satellite Clock Drift
A. Selective Availability (SA) error
When Global Positioning System is made open for the public use for the navigation purpose. The policy of degrading the positioning accuracy available to civil GPS users is known as 'selective availability'[1] . The U.S defense add some error of several meters intentionally, to prevent it from the misuse of it. So, this error is known as "Selective Availability" error. Which is then removed in May, 2000.
B. Multipath And Receiver Noise error
Both of these are non-removable errors and independent from the Differential concept. When the GPS receiver is surrounded by large and tall building, then it experiences multipath of signals. Satellite signals are reflected from buildings and then reach to the receiver, due to this it experiences delay, known as "Multipath delay". Furthermore every receiver contains some noise due to structure which is not avoidable.
C. Ionospheric And Tropospheric Delay error
Satellite signals passes through different layers of atmosphere while travelling to the earth. Due to the different density of layers it is get a bit refracted and experiences path delays, this results into "Atmospheric errors". Users, which are using GPS near the reference station they will contain same signal paths as of the reference station.
D. Ephemeris error
73 which provides difference of several meters from the actual position. This error can be effectively removed unless both receivers having large distance between them. The error will decrease in proportion with the distance between rovar and reference.
E. Satellite Clock Drift error
Satellites having atomic clocks made of rubidium, which is very precise. But due to the difference between an atomic clock and a normal clock it suffers from the error of several leap seconds. If both, Reference and Rover, receivers are situated in the same vicinity the satellite clock error can be easily removed through "Double Differencing" method.
IV. CONCEPTOFDGPS
Due to these various kinds of errors included in navigation signal, a GPS receiver is unable to locate position accurately. For the removal of these errors concept of DGPS is used.
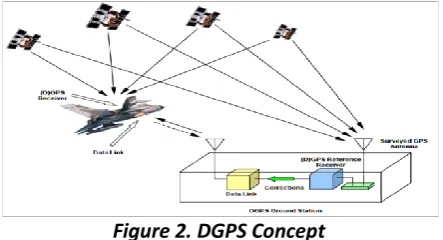
The architecture of Differential GPS has been shown in figure. It is an augmentation method which is used for higher accuracy and better positioning. Unlike the conventional positioning system, DGPS system consists two or more receivers.
Figure 2. DGPS Concept
One of them is stationary and situated at a known location which has been surveyed already, known as "Reference Receiver". Another receiver is known as "Rover Receiver", on which correction has been applied and more accurate position has been calculated. "Data link" is required between Reference and Rover receiver to transmit corrections from Reference to Rover receiver.
The DGPS system mainly consists of three sections namely "Reference Station", "Rover Receiver" and "Data Link", which are described below:
A. Reference Station
"Reference station" includes a "Reference Receiver" situated at known location and a "Data Link" between Reference and Rover for the transmission of the correction data. With the help of precisely located Reference Receiver, error can be computed more accurately, conclusively one can achieve accurate position of Rover Receiver located in the same vicinity. With the help of known co-ordinates, we can compute a "True Range" between Satellite and Receiver. Furthermore, we also get "Observed ranges" from the GPS receiver. Here, the "Observed Range" is the collection of "True Range" and various types of errors which is experienced by the navigation signal. So that, by taking difference between "Observed range" and "True Range", one can get the value of error. Which is transmitted to the rover receiver for the computation.
B. Rover Receiver
74 additional recursive processing. Due to the same amount of errors, one can apply the correction at the rover receiver and true position can be computed.
C. Data Link
One of the very necessary condition for DGPS system is that both the receivers should compute their position by the same set of satellites. Due to this, one can apply the correction efficiently and can have correct position. This correction is transmitted from Reference to the Rover Receiver via Data Link. The data link can be the radio link for the short distances in the range of tens of kilometers. DGPS can be applied in the range of several kilometers only, it is the limitation of it. So for the short distance transmission we use "Radio link". It is called "Ground Based Augmentation System". For the transmission of data over the long distances another kind of data link is used. we can transmit the correction via satellites and on the same frequency as of the navigation messages. So that no extra antenna is required for the reception of it. It is known as "Satellite Based Augmentation System". Many countries had developed their own SBAS systems. They broadcast the correction data free of cost so that anyone can use it. In addition, the required corrections are computed from the network of reference stations spread over the different areas of earth.
This the way the DGPS work. Computation of position can be done in the real time and by the post processing also. We can store the data of Reference as well as Rover Receiver for the post processing purpose.
V. DGPSMETHODS
Differential GPS (DGPS) is a means for improving navigation accuracy in a local area [19-20].There are mainly two types of methods for DGPS, which relies on type of observables. Real Time Kinematic GPS can provide centimeter accuracy measurements in real time[10] [11]. First method for DGPS is "Code based technique" in which pseudo range is used as an observable. On the other hand, Second method is "Carrier phase tracking" in which phase of the signal is used as an observable.
A. Code Based Technique
Code based technique uses psuedoranges of reference station to compute the accurate position of Rover station. The basic need for DGPS is there must be same set of satellite visible at both receivers. At the reference station, it computes the pseudo range corrections for each visible satellite. And among these corrections, Rover receiver uses those correction for which satellites are visible. With the help of this approach we can fulfill the necessity of same set of visible satellites.
Pseudorange: It equals to distance between Receiver and satellite with various kind of error terms, which includes clock errors, atmospheric errors and many more.Its relative accuracy can be up to meter level for accurate navigation, owing to weakening atmosphere delay, ephemeris error, satellite relativity error and satellite clock error[12].
For the computation of Pseudorange needed satellite clock and position are available from navigation message and ephemeris data. There are two types of code namely C/A code and P code. C/A code is carried on L1 frequency having 300m wavelength at the rate of 1.023 million bits per second. Moreover it used for public use having less accuracy than P code. P code is carried on both L1 and L2 frequency having 30m of wavelength and bit rate of 10.23 million which is 10 times the C/A code. Furthermore, P code is encrypted and generally used for the military purpose. Pseudo range is not a true range because having some error terms. It can be defined as propagation time of signal multiplied by speed of light. So,
ƍ = c (∆T) (2)
(∆T) = tR - tS = (tR - δR) - (tS - δS) = (tR - tS) + (δR - δS) (3)
so, (∆T) = ∆t + ∆δ (4)
Now, put it in above equation
ƍ = c (∆T) (5)
= c (∆t - ∆δ) = c∆t + c∆δ = R + c∆δ (6)
so, c∆δ = ƍ -R (7)
where,
tS = Satellite clock time at signal transmission tR = Receiver clock time at signal reception
75 R = True range
From the above equation one can say that pseudo range correction can be achieved from the difference of pseudo range to true range. These correction for every visible satellite is computed at the reference station and transmitted over data link to rover station. At where, with the use of proper algorithm, actual position can be computed. But it is less accurate due to the use of C/A code.
B. Carrier Phase Tracking
"Carrier Phase" is defined as the Phase difference between received phase and receiver oscillator phase at the time of measurement.
Navigation signal travels on two frequencies L1 and L2 having wavelength of 19cm and 24 cm respectively. When one turn ON the receiver, number of wavelength Nλ is not known, which is called as carrier phase ambiguity. During the tracking of satellite, change in distance can be observed but carrier phase ambiguity remains constant. It can be resolved by an algorithm Ambiguity Resolution On the Fly (AROF) [2].
Figure 3. Carrier Phase Tracking [21] Where,
N(t0) = Unknown number of integer cycle Fr(Φ) = Measured Fractional Part
Int(Φ; t0,t) = Measured Integer number of complete cycle
In carrier phase tracking, carrier phase observable is used for the differential GPS. Φ = c(dt - dT) + ƍ - dion
+ d
trop- λN(t
0) + dmult+ n
(8)76 Figure 4. Double Differencing [21]
First of all let's take single difference between receivers i and j with single satellite p, ∆P
ij = ΦPi - ΦPj (9)
= c(∆dT) - ∆ƍ - ∆d
ion+ ∆d
trop- λ∆N(t
0) + ∆dmult+ ∆n
(10)From the above equation we can say that satellite clock error gets removed because of the common satellite is used.
Now, if we take double difference with the help of another satellite j.
▼∆pq
ij = ∆pij - ∆qij (11) = ▼∆ƍ - ▼∆dion
+
▼∆dtrop- λ
▼∆N(t0) + ▼∆dmult+
▼∆n (12)From the above equation, we can see that Receiver clock error is eliminated with the help of two single difference of two receiver. If we do triple difference then we can able to eliminate Integer ambiguity, too.
VI. CONCLUSION
The most important aspect of any positioning system is accurate positioning. Several techniques can be used to achieve higher accuracy for better positioning. The method that has to be used relies on objectives like superior quality, increased efficiency, and the level of accuracy needed by particular application.
Conclusively, we can say that with the help of Reference Receiver one can compute the error at the reference station and applies it in algorithm at the rover receiver due to the same vicinity, and can find correct position in the real time or by post processing. Higher accuracy can be achievable, and we can use it in the critical application like Air-craft landing and City and land surveying.
REFERENCE
[1] G.J. Morgan-Owen, G.T. Johnston. "Differential GPS", ELECTRONICS & COMMUNICATION ENGINEERING JOURNAL FEBRUARY 1995, pp. 11-21.
[2] Chen Shuxin ,Wang Yongsheng, Chen Fei. "A Study of Differential GPS Positioning Accuracy", 3rd International Conference on Microwave and Millimeter Wave Technology Proceedings,2002, pp. 361-364. [3] Norsuzila Ya’acob, Mardina Abdullah and Mahamod Ismail, "Ionospheric Modelling: Improving The
Accuracy of Differential GPS (DGPS) in Equatorial Regions", Asia-Pacific Conference on applied electromagnetics procedding, Malaysia, Dec 4-6, 2007.
[4] Tashfeen B. Karamat, Mohamed M. Atia, Aboelmagd Noureldin, “Performance Analysis of Code-Phase-Based Relative GPS Positioning and Its Integration With Land Vehicle’s Motion Sensors”, vol.14, No. 9, pp. 3084-3100, Sept – 2014.
[5] Fumio ueda, Shoichi Washino. “AStudy for Accurate Measurement of Relative Position using the Principle ofDifferential GPS”. Industrial Electronics & Systems Laboratory Mitsubishi Electric Corporation Amagasaki
77 [6] Ben Nizette, Andrew Tridgell, Changbin Yu, “Architecture and Implementation of an Affordable Differential
GPS System”, Research School of Computer Science Australian National University, IEEE 2014, pp. 2321-2326.
[7] Mikko Pikander, Finnish Navy, Pekka Eskelinen. “Differential GPS Dynamic Location Experiments at Sea”,IEEE A&E systems magazine, March 2004, pp. 36- 39.
[8] Jay Farrell, Tony Givargis, “Differential GPS Reference Station Algorithm Design and Analysis”, IEEE Transiction on control systems technology, Vol. 8, No. 3, May 2000.
[9] Javed ashjaee, “Differential GPS With Ashtech XII”, IEEE 1988, pp. 318-322.
[10] Yoichi Morales and Takashi Tsubouchi, “GPS Moving Performance on Open Sky and Forested Paths”, IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 29 - Nov 2, 2007, San Diego, CA, USA, pp. 3180- 3185.
[11] Yunchun Yang, Jay Farrell, and Matt Barth, “ High-Accuracy, High-Frequency Differential Carrier Phase GPS Aided Low-Cost INS”, IEEE 2000, pp. 148-155.
[12] Xu Yinglei, Li Qunzhan, Xie Shaofeng, Zhang Liyan, “Study on Algorithm and Communication Protocol of Differential GPS Positioning based on Pseudorange”, International Forum on Information Technology and Application, IEEE 2009, pp. 606-609.
[13] S. C. Wu, T. P. Yunck, S. M. Lichten, B. J. Haines and R. P. Malla, “GPS-Based Precise Tracking of Earth Satellites from very low to Geosynchronous orbit” , IEEE 1992, pp. 1-8.
[14] Blackwell, E.G., Overview of Differential GPS Methods, Global Positioning System, Vol. 111,The Institute of Navigation, 1986, pp. 89-99.
[15] Creamer, P.M.; Alsip, D.H. and Radziszewski, J.P., Performance Requirements for the Coast Guard’s Differential GPS Service, NAVIGATION: Journal of The Institute of Navigation, Vol. 40, No. 4, Winter 1993-1994, pp.375-393.
[16] Conley, R., GPS Performance: What Is Normal,NAVIGATION: Journal of The Institute of Navigation, Vol. 40, No. 3, Fall 1993, pp.261-281.
[17] Parkinson, B.W.; Stansell, T.; Beard, R. and Gromov, K., A History of Satellite Navigation, NAVIGATION: Journal of The Institute of Navigation, Vol. 42, No. 1,Spring 1995, pp. 109-164.
[18] Ben Nizette, Andrew Tridgelland Changbin Yu, “Low-cost Differential GPS for Field Robotics”, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), July 8-11, 2014, Besancon, France, pp.1521-1526.
[19] Bradford W. Parkinson, “Wide area differential GPS (WADGPS): Future Navigation System”, IEEE Transactions on Aerospace and Electronic Systems, col. 32, No. 2, pp. 795-808, April 1996.
[20] M. Matosevic, Z. Salcic, and S. Berber, “A comparison of accuracy using a GPS and low-cost DGPS,” IEEE
Trans. Instrum. Meas., vol. 55, no. 5, pp. 1677–1683, Oct. 2006.
![Figure 4. Double Differencing [21]](https://thumb-us.123doks.com/thumbv2/123dok_us/8874865.1816249/6.595.102.493.56.287/figure-double-differencing.webp)
