Structure Design Optimization Considering
Static and Dynamic Responses
Hee Keun Cho
Abstract— Structure design has been optimized for physically
coupled problems. A non-gradient evolutionary genetic algorithm (GA) is employed to optimize the behaviors of isotropic solid structures. A structure showing thermo-elastic-plastic and creep (TEPC) behaviors are considered for optimization under a number of static and dynamic constraints. Complicatedly coupled solid behaviors are numerically calculated by utilizing a FEM. The presented optimization scheme is conducted in conjunction with a FEA an d involves newly developed 2D nonlinear TEPC and modal analysis FEA codes. The present evolutionary technique makes it possible to arrive at an optimum design with respect to a solid showing TEPC features with time- and temperature-dependent material properties under dynamic natural frequency constraints. The developed code has been verified through an example problem of a dome structure. The present results, attained for the first time, could be useful to ascertain the synergizing effects of a FEA and a GA in TEPC problems
Index Term— FEA, GA(genetic algorithm), optimization,
dynamics
I. INTR ODU C T IO N
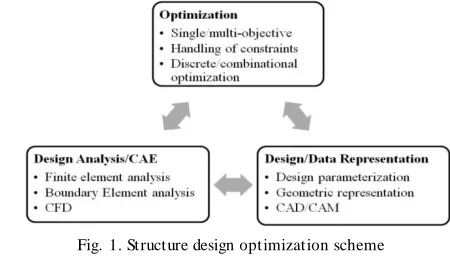
Structure design optimization p roble ms based on fin ite ele ment ana lyses in the fie ld of auto mobiles, a irc raft , spacecraft, and other industria l mach ines have won growing interest in engineering in recent years. Fig. 1 denotes how to optimize structures through the interaction of a nu mbe r o f detailed technical fields.
The develop ment of an optimization a lgorith m starts fro m the we ll known tradit ional gradient-based methods. More recently, a non-gradient probabilistic optimization algorithm-GA and pa rtic le swarm optimizat ion a lgorith m have yielded e xce llent results in enginee ring p roble ms and they have been actively applied to structure design. Advanced optimization algorith ms that shorten the calculat ion time have recently been developed and have been successfully applied to various techniques.
These advanced optimizat ion algorith ms have already been utilized for structure design. Structure optimization init ia lly started as a method to optimize simp le design variables such as length or thickness. Recently, however,
Hee Keun Cho is with the Faculty of Mechanical Engineering Education, Andong National University, 1375 Kyungdong –ro, Andong, Kyungpook, Republic of Korea (corresponding author, phone +82 -54-820-5677 e-mail:
even complicated geo metric structures involving diverse coupled behaviors have been optimized in accordance with the development of FEM techniques.
Cho and Ro wlands recently comb ined a GA sche me with a FEA to optimize structures and thereby enhance mechan ical performances [1]. Severa l other rep resentative studies documenting the applicat ion of GAs to structures have also been published [2-7].
Most engineering optimizat ion a lgorith ms use gradient based methods, where the search direction is a function o f the gradient of design variab les [8]. Gradient-based methods, however, a re unable to dea l e ffic iently with co mple x design space or a large nu mber of design variables. These drawbacks can be overco me by using GA optimizat ion. GA procedures also converge well to the global optimu m va lue with respect to both discrete and continuous design variab les. Severa l researchers have recently reco mmended GAs for optimizing structures. The present study merges developed nonlinear TEPC ana lysis FEA codes and a GA with a para llel co mputing scheme to optimize a rbitra ry geometric structures. The FEA code accounts for the various design variables in the formu lation of a stiffness matrix. Data fro m the FEA are e xchanged, bac k and forth, with the paralle l p rocessing capability of the GA optimization module . Mathe mat ica l formu lations of the fin ite e le ment analysis equilibriu m equations are presented in the ne xt section.
Fig. 1. Structure design optimization scheme II. RESEARCH METHODS A. Finite Element Analytical Back ground
interdependent functions. This software accounts for the TEPC characteristics in calculat ing material deformations and stress. Informat ion is parallel-processed freely between the FEA and the optimizat ion module GA . Re levant mathe matica l details for the nonlinear coupled FEA a re outlined below.
Stage I: Heat Transfer and Thermal Stress [9-11]
The principal idea of the TEPC analysis is first discussed. The code is for 2D 8-node plane stress and/or strain isoparametric ele ments derived fro m the virtual work theory. A general non-steady state 2-dimensional heat transfer governing equation is given in Eq. (1).
0
T T T
c k k q
t x x y y
(1)
Eq. (1) can be transformed into an FEA equilibriu m equation, Eq. (2), by means of a variational method. In Eq. (2), Trepresents the temperature change rate against time.
( ) ( ) ( )
( 1) ( 1) ( 1)
t t i t t t i t k t c t r i t t t t c i t t r i t t k i
C K K K
Q Q Q Q
(2)
If T0is regarded as the initial re ference te mperature when no thermal stress is imposed, the total stress originating fro m both mechanical strain and thermal strain can be expressed as
[ ] th
E
(3)where is the engineering strain and
th is the therma l strain. For an isotropic material the components are
0
th
xx T T
,
thyy
TT0
,
xyth 0. If the strain at anode, , is ze ro, the stress due to therma l strain can be regarded as the init ial stress. Here, SIis the init ia l stress vector and can be written as
T II V
R
B S dV (4)8
2
1
1 0 1
1 0 1
1
1 1
0 0
2
I
i i o i
E
S h T T
(5)In Eq. (5) hi is a Lagrangian shape function and is Poisson’s ratio.
Stage II: FEA Equilibrium Equations for Thermo-Elasto-Plastic and Creep Analysis[11-16]
In the first step, the thermo-e lastic-plastic FEA equilibriu m
equation will be derived and then creep analysis equations will be combined with that for a complete FEA equilibriu m equation. In a Cartesian coordinate system, if stress tensor, plastic strain, and temperature are represented as ij , p
ij
, and T, respectively, the yield function init ially suggested by Melan [7] can be e xpressed as f f
ij, ijp,T
C. Byapplying the principle of v irtual d isplacement theory, that is, the total international virtual work is equal to the total e xternal work, to an object in an equilibriu m state with an arbitrary s mall and appropriate displacement, the equilibriu m equation is defined as
th f q e
dL dL dL dL dL K d
(6)
where
0 0 1 2 1 1 2 T vol T p th vol T f vol T p q vol T e e vol T T p voldL B d dV
dL B D dTdV f f dL B dTdV
S T dL B D T T
dT dT dV
T T
dE dL B D
E G dE
B T T dV
E K B D B dV
In the case of an elastic proble m, Dpis used on behalf of
e
D
.
dL is the nodal force a risen fro m the e xte rnal force, when the e xternal force that does not exe rt
dL becomes zero.
dL th ,
f
dL and
q
dL denote, respectively, equivalent nodal forces caused by externa l therma l-e xpansion coeffic ient, p lastic function, and te mperature and cooling rate dependency. We derive the TEPC FEA equilib riu m equation by adding a creep analysis module to Eq. (6). The constitutive equation at time t tincluding elastic, p lastic, therma l, and creep structure behaviors can be expressed as Eq. (7)
1
t t
t t t t E t t P t t C t t
E
S e e e
(7)
1 2
t t
t t t t t t th
m t t m
E e e
where ttS is the deviatoric stress tensor and can be written as tt
ijtt
m ij. eijis the total strain tensor. Individual components eijE, eijP, eijC, eijTH are, respectively, the elastic strain tensor, plastic strain tensor, creep strain tensor, and therma l strain tensor. Hence, the governing equations for the finite element analysis are now
( 1)( 1) ( 1) ( 1)
( 1) ( 1) ( 1) ( 1)
( 1) ( 1)
0,1, 2
T t t t t t t i t t
L V
E t t P i t t C i t t TH i t t i t t E i t t i t t P i
t t C i t t TH i
K U R B
C e e e dV
C e e
e e i
(9)
By substituting U(i1)ttU(i1)ttU( )i into Eq. (9) in order to e xpress it in incre mental form, it is possible to rewrite Eq. (9) as follows:
( 1)
( ) ( 1) ( 1) ( 1)
T t t
t t i t t
L V
E t t i t t P i t t C i t t TH i
K U R B
C e e e e dV
(10)
Stage III: Rayleigh-Ritz Modal Analysis
There are several methods to solve the modal prob le m. Here, the subspace iteration method suggested by K. J. Bathe [11,18] is used. Neglecting damping and e xternal force, the free vibration equation is
M U
K U 0 (11)Assuming now that the general solution to be obtained is
i tu e , the standard natural frequency calculation equation is achieved:
2
0
M K u
(12)
If it is assumed, Eq. (12) is a n-th polynomia l eigenvalue equilibrium equation with respect to .
K
i M
i 0 (13)Since several low-order modes contribute substantially more than the higher-order modes to the structure’s dynamic behaviors, an analysis method utilizing these characteristics can substantially reduce the calculation time. Methods that only use several low-order modes to calculate the whole structures’ approximate dynamic behaviors are called subspace iteration methods. If the eigenvectors ’ approximate
value
Xi is e xpressed with the Ritz test vector X ’scomposition, the modal analysis equilibriu m is g iven by Eq. (14).
0T T
K M X K M X
X X K M
(14)
B. Optimization
Stage I: GA Optimization Details[19-22]
As discussed previously, the genetic algorith m is applied here to structure optimization based on a FE analysis, which could not be sufficiently optimized by the gradient concept. Recognizing a GA is a discrete mult ipoint-searching algorith m based on ideas of natural evolution and the survival of fittest, multip le design points gradually evolve toward a global optimu m. The technique’s basic scheme of a nondeterministic direct ional search differs fro m the gradient method in the differentia l equation of the objection function. The GA has the same nu mber of searching points as the number of people used, i.e ., each indiv idual person is a searching point for the optima l value, and numerous searching points are randomly distributed throughout the available design space. This prevents the process fro m becoming trapped into a local convex or concave, allowing it to reach a solution in the desired g lobal design space.
Conversely, conventional gradient-based searching
methodologies utilize only a single searching point and can consequently be easily trapped into a local conve x or concave design space. The ability of the GA’s multi-point d iscrete search technique to reach a global, rather than potentially just a local, design space is a major strength of this method.
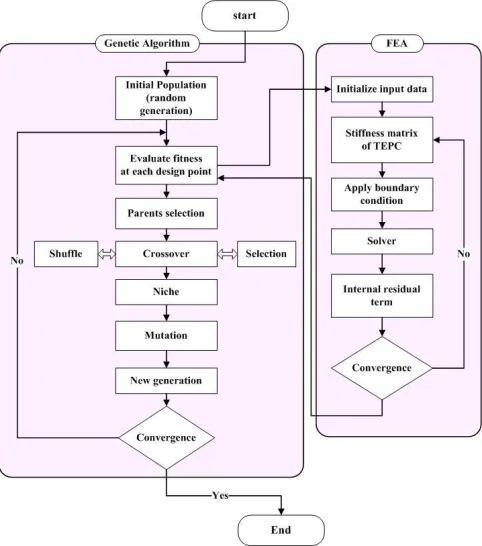
Typical GA functions include initia lizat ion of chromosomes, c rossovers, mutations, natural selection, calculation of fitness, and creation of new generations. With reference to Fig. 2, a brief description of the GA re levant to the present parallel computation with a FEA follows.
Population
There is not a novel approach by wh ich to e xactly dec ide the size of the population. This is especially true for large problems. Ho wever, Goldberg et al. proposed an approximate population scaling law [19,20]. Biologica lly, individuals of the population ma ke up a set of chromosomes , which consist of combined genes , and represent a solution set. In the present case, the values of the fiber angles of discrete finite ele ments and plies are recorded in chromosomes as binary code. These individual chro mosomes are then evaluated independently during the parallel GA -FEA process.
Fitness
Values of the ma ximu m von Mises stresses are delivered fro m the FEA process to the GA process of Fig. 5.2 and used for the fitness evaluation. The fitness, eval(people, t), at time
t
is defined as the value of the object function calculated with a ll applied design variables (fiber orientations) included within the chro mosomes. For n-nu mber of design variab les in each string, the fitness is1 2
( , ) ( , , , n)
eval people t f (15)
Selection
Selection methods include roulette, ranking, tourna ment , and elitist preserving. The tournament s election approach is used here, with an elite’s preservation. A random nu mber generator in the GA p lays an important role in the selection process. Among the various selection methods cited above, the tournament technique transfers the best fitness individ uals among a certa in number of selected individuals into the next generation by means of the random number. The process is repeated until the size of the population reaches the quorum. The elite preservation strategy prevents the best individual in a generation fro m being destroyed by mutation or c rossover. The elite concept enables the best individual to always progress to the next generation.
Crossover
This analysis adopts uniform crossover. Sche mas can be destroyed by crossover or mutation. Consider a pa ir of parents producing two children. By using a certa in mask, parents interchange genes when the number of bites of a mask is equal to ze ro. It is evident that the length of a schema plays a significant role in destroying, or in the possible survival, of the schema, S. The positions of crossover are generally selected fro m the pattern of the mask e mployed. This means the survivability of schema, P Ss( ), is implicit ly
given by the following equation:
( ) ( ) 1
s
length S P S
a b
(16)
where a is the nu mber of b ites in a chro mosome and b is the number of bites whose binary changes. In this analysis, the crossover possibility is 50 %.
Niche
Go ldberg details a p ractical scheme that direct ly uses a sharing metaphor to induce a niche. His technique distributes the population evenly over the entire design space by means of a sharing function. Motivated by its suitability and effectiveness, a triangular sharing function is used in this study. After accumulating the total number of shares by the sharing function, an individual’s reduced fitness is calculated by taking the potential fitness (the unshared value, f x( j)) and dividing by the accumulated number of shares, i.e.,
1
( ) ( )
( ( , ))
i s i n
i j j
f x f x
s d x x
(17)where s is the sharing function, xi and xj are design values, and ( ,d x xi j) is the distance between xi and xj.
Mutation
Applying a constant mutation probability to the genes of the chromosomes changes these genes into opposite ones, i.e., the binary code is changed. The author considered one percent of the population to be mutated during a generation. Moreover, only one bite of a chromosome of the individual mutating people changes, and this bite is selected randomly. Mutation, which is a type of random searching method, is used ma inly to recover and sustain the diversity of gene-characters lost from the population.
In summary, significant differences between GA and other searching or optimization methods include the following:
· The GA directly uses coded parameters (i.e., binary codes of each person’s chromosomes)
· The GA provides multi-, rather than single-, point searching
· By using a fitness function, GA performs a blind, rather than a derivation, search
· The GA utilizes probabilistic operators without deterministic rules
III. RESULTS AND DISCUSSION A. Optimization Analysis and Results
The TEPC constitutive equation coupled with temperature and mechanical behaviors was briefly described in the previous section, and the functions and characteristics of the GA , one of the most advanced optimization algorith ms, we re also presented. Some pract ical ana lyses employing both the discussed FEA procedures and a GA are imp le mented here in. Two e xa mp le proble ms are presented in order to substantiate the methodology suggested in this paper. As a first step in the validation of the following optimization proble m, an elastic plate undergoing mechanical load and displacement constraints is optimized and the results are compared with those of other optimization methods. Subsequently, a do me structure having TEPC characteristics subjected to stress and dynamic frequency constraints has been optimized.
Stage I: Elastic Plate Thick ness Optimization
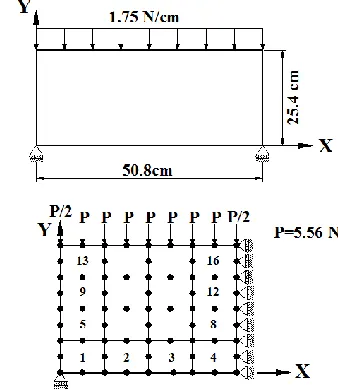
The illustrative exa mp le of an uppermost side-loaded 50.8c m by 25.4c m rectangular plate, as illustrated in Fig. 3, is optimized. A distributed load is applied along one side of the plate and the plate is assumed to be simply supported at both end-points of the bottom edge. In this proble m, it is assumed that the plate is considered only within an elastic range and thus no other materia l variations are considered. Geo metric , loading, and material symmetry enables modeling of only one half of the component. Sy mmetric displace ment and boundary conditions are applied to the vertica l lines of symmetry. The ha lf-model is divided into 16 discrete 2D, eight-node, isoparametric plane stress elements of the type developed herein, as shown in Fig. 3. The objective of this optimization is to minimize the volume of the plate by varying the thickness of individual ele ments. Thus, each ele ment’s thickness becomes the design variable and ma ximu m a llowable stress limits are imposed. The materia l properties are
E
=206.8MPa and
=0.3. The definit ion of the optimization problem is as follows::
: 0.208
0.254 76.2 ( : )
vonMises
i i
Minimize volume
Constraints MPa
mm t mm t element thickness
TABLE I
RESULTS OF P LATE OP TIMIZATION
Optimum (Final) Design
User element Number
Present RQC OCB GRG
1 1.14E+00 1.14E+00 1.14E+00 1.14E+00
4 2.87E-01 2.87E-01 2.87E-01 2.88E-01 8 2.54E-02 2.54E-02 2.54E-02 1.77E-01 12 5.11E-02 5.10E-02 5.71E-02 1.70E-01
16 2.42E-01 2.42E-01 2.40E-01 1.81E-01 Total
Volume (cm3)
3.27E+02 3.28E+02 3.29E+02 3.56E+02
GRG Generalized Reduced Gradient ; RQP: Recursive Quadratic Programming
OCB: Optimum Cost Bounding
T
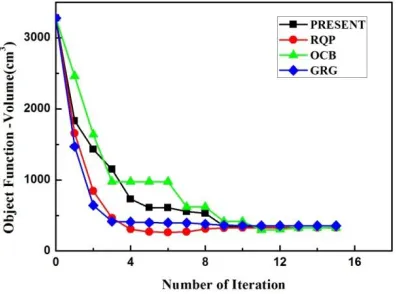
he purpose of this problem is to find the thickness of each ele ment that minimizes the volu me while satisfying the conditions that the ma ximu m stress at the gauss integration point does not exceed 0.208MPa and the thickness is in a range of 0.254mm to 76.2mm. The results are compa red with other results analyzed with GRG, RQP, and OCB optimization a lgorith ms in Tab le I. The p resent results agree well with other reliable results. Thus, the reliability of the current FEA methodology, procedure, and numerica l formulations has been verified.Fig. 3. FEA and geometric models for plate thickness optimization
Fig. 4. Objective function histories during optimization
Stage II: Dome Structure Optimization Under Static and Dynamic Constraints
The previously derived TEPC FEA method and GA optimization a lgorith m a re both e mployed to obtain the optimu m structure design of a dome. A dome is one of the prevalent structures used to build stadiums, gymnasiums, etc. The objective in this section is to optimize a dome structure that undergoes TEPC behaviors within allowab le static stress and dynamic frequency ranges. The volume is minimized by man ipulating the do me’s wall thickness (t) and the height angle () measured in the counter-clockwise direction fro m the x-a xis, as seen in Fig. 5(b). Since the dome’s geometry is a xisy mmetric, a 8-node 2D a xisy mmetric e le ment model with the TEPC formu lation was used in the analysis. Heat transfer takes place through the thickness. There is a constant heat flu x imposed on the outside surface and convection occurs on the inside wall, as shown in Fig. 5. Fig. 5(b) inc ludes all geometric dimensions and boundary conditions of displacement and therma l and mechanica l loads. The materia l properties are presented in Table II.
(a) (b)
Fig. 5. FEA and geometric dome model for T EPC optimization
As noted earlier, the c reep is a function of t ime and temperature. Te mperatures obtained fro m the analysis of heat transfer affect the materia l p roperties and stress. Therefore, the temperature d istribution indirectly contributes to creep deformation. In this proble m, t ime is considered to be the
only parameter affecting creep. As shown in Table II, some of the materia l properties depend on temperature and/or stress. In order to generate creep deformat ion, time -e lapse is necessary. Optimu m design values at three points, 0sec, 30sec, and 60sec, we re obtained. Since creep deformat ion and stress rela xation vary accord ing to time, the optimu m values of the design variable and objective function are different depending on the analysis time point. The mathe matica l expressions for the optimization problem are as follows:
Minimize: Volume Constraint:
1 1
60 90 ( : ) 3. 25 ( : )
7500 ( : )
250 ( : )
1.3 1 ( : )
i i
V V
angle t t thickness
f Hz f fundamentalfrequency MPa element stress U E U vertical displacement
TABLE II MATERIAL P ROP ERTIES
TABLE III
OP TIMIZATION RESULTS OF DOME’ S TEP C ANALYSIS
The results are summa rized in Table III. The three cases of optimization yie ld similar results. The ma ximu m stress occurs at the bottom edge and reaches 250MPa, the allowab le design limit. As e xpected, the time dependent creep combined with other physical characteristics influences the
Properties Given values
xx
k ,kyy(W/mm℃) 3.12E-1 +0.0002*T
h(W/mm2℃) 1.4E-2 +8.75E-6*T C (J/mm2℃) 5.5E-6
flux
Q (W/mm2)
1.2-2.5E-4*T xx
,yy (1/℃) 1.0E-5
E(MPa) 210,000
0.3
yield
(MPa) 230
o
T , Text(℃) 25.
tC (1.0E-7* )*t
(Kg/mm3)
7.85E-9
T ime (sec)
Angle (: deg.)
T hickness (t:mm)
Volume (mm3)
entire structure design optimization, and it is verified that its effect might not be small enough to be neglected. To date, creep has not been actively studied by researchers in the area of structure optimization, and fe w research results can be found in the literature.
To the author’s knowledge, all of the published studies on structure optimization of static problems are limited to handling one or two physical categories; for exa mp le, e lastic, plastic or thermal proble ms. This study has expanded the structure optimizat ion area to TEPC materia l behavior by synergizing GA optimization.
IV. CONC L U S ION
In this work, optimu m design is achieved primarily by synergizing FEA with a probabilistic evolution GA, the most advanced optimization a lgorith m. Most previous optimization structure studies of elastic materials a re based on a tradit ional gradient based optimization algorith m. The present extension to a GA for the TEPC material features overcomes the limitat ions of general structure optimizat ion, thereby extending the method’s applicability.
In order to describe the coupled TEPC phenomenon, FEA equilibriu m equations were emp loyed to provide numerica l solutions, including static and dynamic responses. TEPC FEA codes were ne wly developed and combined with the GA for an integrated FEA-GA para lle l nu merica l system. The developed FEA-GA approach was applied to two e xa mp les, a plate and dome optimization, in order to demonstrate its validity. It was found that the numerically obtained values were in good agree ment with other reliable results. GAs are less likely than gradient methods to become trapped in loca l solutions. Rather, they progress to a global optimu m solution. This advantage of GAs, plus their ability to accurately satisfy an objective function, guarantees reliable solutions of complicated engineering proble ms such as those analyzed here.
ACKNOW L E D GM E N T
The author wishes to acknowledge the support of the Andong National University of Korea.
REFERENCE
[1] H. K. Cho and R. E. Rowlands, "Reducing tensile stress concentration in perforated hybrid laminate by genetic algorithm," Composite Science and Technology, Vol. 67, pp. 2877-2883, 2007.
[2] Z. G. Soremekun, Z. Gürdal, R. T. Haftka and L. T. Watson, "Composite laminate design optimization by genetic algorithm with generalized elitist selection," Computers & Structures, Voo. 79, pp. 131-143, 2001. [3] A. Rodorok, K. Watanabe and H. Kobayashi, "Application of genetic
algorithms to stiffness optimization lf laminated composite plates with stress-concentrated open holes," JSME International Journal, Vol. 38, pp. 458-464, 1995.
[4] K. G. Chae and J. H. Park, "Trajectory optimization with GA and control for quadruped robots," Journal of Mechanical Science and Technology, Vol. 23, pp. 114-123, 2009.
[5] M. T. McMahon, L. T. Watson and G. A. Soremekun, " A fortran 90 genetic algorithm module for composite laminate structure design,"
Engineering with Computers, Vol. 14, pp. 260-269, 1998.
[6] M. B. Gero, A. B. Garcia and J. J. Cozdiazk, "A modified elitist genetic algorithm applied to the design optimization of complex steel structures,"
Journal of Constructional Steel Research, Vol. 61, pp. 265-280, 2005. [7] D. B. Adams, L. T. Watson, Z. Gürdal and C. M. Anderson-Cook,
"Genetic algorithm optimization and blending of composite laminates by locally reducing laminate thickness, Advances in Engineering Software, 35 (2004) 35-43.
[8] M. E. M. El-Sayed, C. K. Hsiung, "Optimum structural design with parallel finite element analysis," Computers & Structures, Vol. 40, pp. 1469-1474, 1988.
[9] K. J. Bathe, "Finite element formulation and solution of nonlinear heat transfer," Nuclear Engineering and Design, Vol. 51, pp. 389-401, 1979. [10] K. J. Bathe and M. R. Khoshgoftaar, "Finite element formulation and
solution of nonlinear heat transfer," Nuclear Engineering and Design, Vol. 51, pp. 389-401, 1979.
[11] K. J. Bathe, Finite element procedures in engineering analysis. New York: Prentice Hall, 1981.
[12] G. Altan, M. Topcu, N. B. Bektas and B. D. Altan, "Elastic-plastic thermal stress analysis of an aluminum composite disc under parabolic thermal load distribution," Journal of Mechanical Science and Technology, Vol. 22, pp. 2318-2327, 2008.
[13] A. Moshaiov, "Finite element formulation of coupled thermo-elastic-plastic beam bending and axial response," Computers & Structures, Vol. 41, pp. 1023-1028, 1991.
[14] S. H. Kang and Y. T. Im. "Thermo-elasto-plastic finite element analysis of quenching process of carbon steel," Journal of Materials Processing Technology, Vol. 192-193, pp. 381-390, 2007.
[15] K. J. Bathe and A. P. Cimento, "Some practical procedures for the solution of nonlinear finite element equations," Computer Methods in Applied Mechanics and Engineering, Vol. 22, pp. 59-85, 1980.
[16] T. Ishizaki and K. J. Bathe, "On finite element large displacement and elastic-plastic dynamic analysis of shell structures," Computers & Structures, Vol. 12, pp. 309-318, 1980.
[17] E. Melan, "Zur Plastizitat des raumlichen Kontinuums," Ing Arch, Vol. 9 pp. 116-126, 1938.
[18] K. J. Bathe and E. L. Wilson, "Solution methods for eigenvalue problems in structural mechanics," International Journal for Numerical Methods in Engineering, Vol. 6, pp. 213-226, 1973.
[19] D. E. Goldberg, K. Deb and J. H. Clark, "Genetic algorithms, noise, and the sizing of populations," Complex Systems, Vol. 6, pp. 333-362, 1992. [20] D. E. Goldberg, Genetic algorithms in search optimization & machine
learning. New York: Addison Wesley, 1989.
[21] M. Gen and R. Cheng, Genetic algorithm s and engineering optim ization.
New York: Wiley-Interscience,1999.