Control of Non-Linear Systems Using
Parallel Structure of Fuzzy PI+PD Controller
B.AMARENDRA REDDY
Assistant Professor in the department of Electrical Engineering, University College of Engineering, Andhra University,
Visakhapatnam, Andhra Pradesh, India.
K. RAM CHARAN
Assistant Professor in the department of Electrical & Electronics Engineering, L.B.R College of Engineering, Mylavaram
Andhra Pradesh, India
KRANTI KIRAN. ANKAM
Assistant Professor in the department of Electrical & Electronics Engineering, L.B.R College of Engineering, Mylavaram
Andhra Pradesh, India
http://www.lbrce.ac.in/eee_Krantikiran.html
K.RAMALINGESWARA PRASAD
Assistant Professor in the department of Electrical & Electronics Engineering, L.B.R College of Engineering , Mylavaram
Andhra Pradesh, India
http://www.lbrce.ac.in/eee_Ramalingeswara.html
Abstract:
This paper presents the comparison of tracking control performance of, parallel combination of fuzzy PI & PD controllers and three input fuzzy PID controller. The analytical expressions of Parallel structure of Fuzzy PI & PD Controller is derived via triangular membership functions by using Mamdani’s minimum inference method with Zadeh fuzzy logic AND, Lukasiewicz fuzzy logic OR and center of gravity defuzzification method. (In Simulation the tracking Control performance of Non-linear Systems using the fuzzy PID and parallel combination of fuzzy PI&PD controllers by considering triangular, gaussian, gbell, trapezoidal and pi input membership functions.) Keywords: Fuzzy control systems, membership functions, non-linear systems, PID controllers.
1. Introduction
In recent years, Fuzzy logic controllers (FLC), especially fuzzy proportional –integral-derivative controllers have been widely used for industrial process owing to their heuristic nature associated with simplicity and effectiveness for both linear and non linear systems.
Fuzzy logic controllers can be divided into three main categories: (1) Fuzzy logic controllers, in which fuzzy inference and if -then logic rules are employed without using precise mathematical models;(2) Fuzzy logic controllers, whose structure is designed based on fuzzy logic with precise mathematical models.(3) fuzzy logic and convention technique combined controllers.
Conventional PID controllers generally do not work well for non-linear systems, and particularly complex and vague systems which do not have precise mathematical models. In order to overcome these difficulties, a class of non-conventional fuzzy PID controllers has been used by us.
The structure of parallel combination of PI & PD preserves the basic properties and merits of the Conventional PID controller, but has a simple configuration similar to the fuzzy PI and PD controllers. It has four simple fuzzy if-then rules for each of the PI and PD controllers. Similarly the structure of the three input Fuzzy PID preserves the basic properties and merits of the Conventional PID controllers, but it has eight simple fuzzy if-then rules.
The present paper should be an attempt to understand what the parallel structure of fuzzy PID controller is and how well it can perform in comparison with the three input fuzzy PID controller. Here it has demonstrated that the parallel combination of fuzzy PI & PD controller is better than the three input fuzzy PID controller for nonlinear systems, this is not a defect of the fuzzy PID Controller. The fuzzy PID controllers were designed for both linear and non-linear systems. The parallel combination fuzzy PI & PD controller developed has a new structure that is not a simple modification of the conventional version.
This paper organized as follows, section II describes the principal components of parallel combination of fuzzy PI & PD controller. Section III describes fuzzification algorithm and fuzzy control rules, section IV describes the defuzzification algorithm, section V describes analytical input output relationship and section VI describes finally computer simulations.
2. Parallel Combination of Fuzzy PI & PD Controller
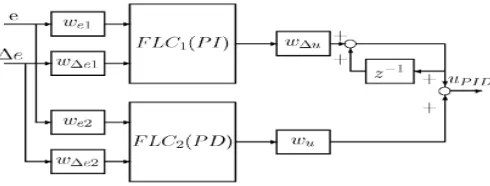
We have used a parallel combination of fuzzy PI & PD control unit arrangement, called the derivative-of-output, the conventional version of (parallel combination of PI & PD) as shown in Fig. 1. This arrangement is often desirable if the reference input contains discontinuities. The derivation of the parallel combination of fuzzy PI & PD control law is performed in two steps: In first step the output of the fuzzy PI [4] controller and in the second step output of the fuzzy PD [5] controller. The final control law combines these two individual control laws together in a appropriate way, as described in more detail in the following sections.
2.1. Derivation of the fuzzy PI control law
The output of the conventional analog PI controller in the frequency s- domain, is given by ),
( ) (
)
( E s
s K K s u c i c p
PI (1) Where c
p
K and Kic are the proportional and integral gains, respectively, and E(s) is the tracking error signal. This equation can be transformed into the discrete version by applying the bilinear transformation
s = (2/T)(z-1/z+1), where T>0, is the sampling period, which results in the following form: ),
( )
( )
(nT K e nT K e nT
uPI p v i p
(2)
Where , ) ( ) ( ) ( T T nT u nT u nT
u PI PI
PI , ) _ ( ) ( ) ( T T nT e nT e nT
ev
And ep(nT)e(nT).
More precisely,
u
PI(
nT
)
is the incremental control output of the PI controller,e
v(
nT
)
is the rate of change of error signal, ande
p(
nT
)
is the error signal.We can rewrite (2) as
), ( )
( )
(nT u nT T T u nT
uPI PI PI (3)
In the design of the fuzzy PI controller to be discussed later, we replace the term TuPI(nT), so that
),
(
)
(
)
(
nT
u
nT
T
K
u
nT
u
PI
PI
UPI
PI (4) Where KUPI is a fuzzy control gain.2.2. Derivation of the fuzzy PD control law
The output of the conventional analog PD controller in the frequency s-domain, is given by
s
(
K
1K
s
)
Y
(
s
),
u
PD
cp
dcWhere c1
p
K and Kdc are the proportional and derivative gains, respectively, and Y(s) is the output signal. This equation can be transformed into the discrete version by applying the bilinear transformation s
2 T z1 z1
, where T>0, is the sampling, period, which results in the following form:) ( ) ) 1 ( ) 1 ( 2 ( )
( 1 K Y z
z T z K z u c d c p PD . (5)
The above equation (5) is simplified as,
), ( )
( )
(nT K1d nT K y nT uPD p d
(6)
Where
,
)
(
)
(
)
(
T
T
nT
u
nT
u
nT
u
PD PDPD
. ) ( ) ( ) ( , ) ( ) ( ) ( T T nT y nT y nT y T T nT y nT y nT d (7)Again, we have,
).
(
)
(
)
(
nT
u
nT
T
T
u
nT
u
PD
PD
PD)
(
nT
u
PD
becomes the fuzzy control action in the new design, where we will useK
uPD as a fuzzy control gain,which will be determined later in the design and rewrite it as
2.3. Parallel Combination of the fuzzy PI & PD controller
The overall fuzzy PI-PD control law can be obtained by algebraically summing the fuzzy PI control law (4) and the fuzzy PD control law (8) together. The resulting law is
)
(
)
(
)
(
nT
u
nT
u
nT
u
PIPD
PI
PDOr
) ( )
(
) ( )
( )
(
nT u
K T nT u
nT u K T nT u nT u
PD uPD PD
PI uPI PI
PD PI
(9) “Equation (9)” will be referred to as the fuzzy PI-PD control law throughout the paper.
Fig. 2. The parallel combination of fuzzy PI & PD control system
The parallel combination of fuzzy PI & PD control system (9) is shown in Fig. 2. This fuzzy PI-PD controller is obtained by inserting the fuzzy PI and the fuzzy PD controllers in the conventional PI-PD controllers [6].
3. Fuzzification, Control rule base
In this section, we follow the standard procedure of fuzzy controller design consisting of fuzzification control rule base formulation and defuzzification.
3.1. Fuzzification
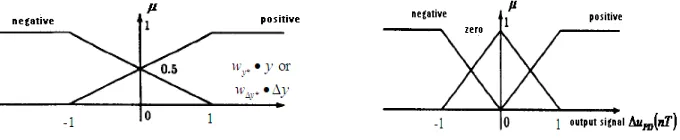
We Fuzzify the PI and PD components of the Fuzzy PI-PD control system individually and then combine the desired fuzzy control rules for each of them. The overall control law given in (9) is taken into consideration during fuzzification. Similar to the fuzzy PI controller [7], the input and the output membership functions of the PI component are shown in Fig.3.
The fuzzy PI controller employs two inputs, namely the error signal
w
e*
e
and the rate of change of error signalw
e*
e
. The fuzzy PI controller has a single output called the incremental control output and is denoted by) (nT uPI
as shown in Fig. 3.
The fuzzy PD controller has two inputs, namely, average change of output
w
y*
y
and the rate of change of outputw
y*
y
. The fuzzy PD controller has a single output called the incremental control output and is denoted by
u
PD(
nT
)
. The inputs to the fuzzy PD controller have to be fuzzified before being fed into the controller. The membership functions for the two inputs and the output of the controller are shown in Fig. 4.Fig. 4 Membership functions for average output, rate of change of output and incremental control output
3.2. Control rule base
Using the aforementioned membership functions, the following control rules are established for the fuzzy PI controller:
R1. If Error is negative AND rate is negative THEN output is negative. R2. If Error is negative AND rate is positive THEN output is zero. R3. If Error is positive AND rate is negative THEN output is zero. R4. If Error is positive AND rate is positive THEN output is positive.
Here “output” is the fuzzy control action uPI(nT) and And method is Zadeh’s logical “And” [1] defined by
AAND
B
min
A,
B
Similarly, from the membership functions of the fuzzy PD controller, the following control rules are used for the PD component.
R5. If Error is positive AND rate is positive THEN output is zero. R6. If Error is positive AND rate is negative THEN output is positive. R7. If Error is negative AND rate is positive THEN output is negative. R8. If Error is negative AND rate is negative THEN output is zero.
In the above rules, “PD output” is the fuzzy PD control output
u
PD(
nT
)
. And other terms are defined similarly to the PI component.For the parallel combination of fuzzy PI and PD controller, the rules for Fuzzy PI part are R1-R4 and the rules for Fuzzy PD part are R5-R8.
These eight rules altogether yield the control actions for the fuzzy PID control law. R1. IF e
p
e
p
n
ande
I
e
I
n
ande
D
e
D
n
THEN
u
u
nl
R2. IF e
p
e
p
n
ande
I
e
I
n
ande
D
e
D
p
THEN
u
u
n
R3. IF e
p
e
p
p
ande
I
e
I
n
ande
D
e
D
n
THEN
u
u
n
R4. IF e
p
e
p
p
ande
I
e
I
n
ande
D
e
D
p
THEN
u
u
p
R5. IF e
p
e
p
n
ande
I
e
I
p
ande
D
e
D
n
THEN
u
u
n
R6. IF e
p
e
p
n
ande
I
e
I
p
ande
D
e
D
p
THEN
u
u
p
R7. IF e
p
e
p
p
ande
I
e
I
p
ande
D
e
D
n
THEN
u
u
p
R8. IF e
p
e
p
p
ande
I
e
I
p
ande
D
e
D
p
THEN
u
u
pl
The “
l
” symbol represents the “large” value in the corresponding direction of either positive (p) or negative (n).4. Defuzzification
In the defuzzification step, for both the fuzzy PI and PD controllers, the commonly used “centre of gravity” formula [4], [6] is employed to defuzzify the incremental control of the fuzzy control law. The “centre of mass” formula for the defuzzification reads as:
input of value membership
input of value membership the
to ing correspond output
input of value membership )
5. Analytical Input-Output Relationship
Due to the use of Zadeh AND Operator, the input space must be divided into a number of regions in such a way that in each region a unique relationship can be obtained for each fuzzy rule between the two membership functions being ANDed. First consider the rule antecedent parts which contain two membership functions the boundary on which the membership value is same between two membership functions is obtained by letting them equal. Once the boundary is available it is trivial to determine which function belongs to which IC compute the value of
w
e*
e
ande
w
e*
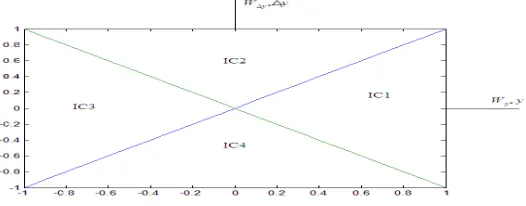
using one pair of error and rate in either IC.Fig. 6. Regions of the fuzzy PI controller input-combination values
Fig. 7. Regions of the fuzzy PD controller input-combination values
Superimposing the four individual input space divisions to form overall input space division for all rules in fuzzy PI controller is shown in fig [6] and for fuzzy PD controller are shown in fig [7]. The control rules for the fuzzy PI controller (R1)-(R4), with membership functions and input-combination (IC) regions together, are used to evaluate appropriate fuzzy control laws for each region. Working through all regions, we obtain the following formulas for the four IC regions are shown in Table 1.
Table 1. Input Spaces of Fuzzy PI Controller
IC1
e
W
e
W
e
W
W
e e e
u
* * *
2
4
]
[
IC2
e
W
e
W
e
W
W
e e e
u
* * *
2
4
]
[
IC3
e
W
e
W
e
W
W
e e e
u
* * *
2
4
]
[
IC4
e
W
e
W
e
W
W
e e e
u
* * *
2
4
]
[
formulas in above, we use the values and apply the straight-line formulas obtained from the geometry of Fig. 7. is shown in Table 2. membership function of the incremental control output signal over the vertical
w
y*
y
-axis as shown in Fig.Table 2. Input spaces for Fuzzy PD Controller
IC1
y
W
y
W
y
W
W
y y y u * * *2
4
]
[
IC2y
W
y
W
y
W
W
y y y u
* * *2
4
]
[
IC3y
W
y
W
y
W
W
y y y u
* * *2
4
]
[
IC4y
W
y
W
y
W
W
y y y u
* * *2
4
]
[
Therefore from Table 1 & Table 2, we have derived the possible 16 analytical expressions for Fuzzy PI-PD controller and are listed in Table 3.
Table 3. Analytical expressions for parallel combination of Fuzzy PI & PD Controller
S. No
Analytical expressions for Parallel combination of Fuzzy PI & PD controller
10
e
W
e
W
e
W
W
e e e u * * *2
4
]
[
+y
W
y
W
y
W
W
y y y u
* * *2
4
]
[
11e
W
e
W
e
W
W
e e e u * * *2
4
]
[
+y
W
y
W
y
W
W
y y y u
* * *2
4
]
[
12e
W
e
W
e
W
W
e e e u * * *2
4
]
[
+y
W
y
W
y
W
W
y y y u
* * *2
4
]
[
13e
W
e
W
e
W
W
e e e u
* * *2
4
]
[
+y
W
y
W
y
W
W
y y y u * * *2
4
]
[
14e
W
e
W
e
W
W
e e e u
* * *2
4
]
[
+y
W
y
W
y
W
W
y y y u
* * *2
4
]
[
15e
W
e
W
e
W
W
e e e u
* * *2
4
]
[
+y
W
y
W
y
W
W
y y y u
* * *2
4
]
[
16e
W
e
W
e
W
W
e e e u
* * *2
4
]
[
+y
W
y
W
y
W
W
y y y u
* * *2
4
]
[
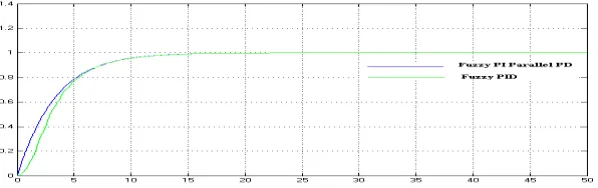
6. Computer Simulations
As a first example consider a non-linear system described by equation
y
=0.0001y
(
t
)
+u(t) and the unit step responses are shown in Fig. 8 to Fig. 12.Computer simulations are done for the Fuzzy PI-PD controller, Parallel combination of Fuzzy PI+PD Controller ,and three input Fuzzy PID Controller when triangular, Gbell, trapezoidal, pi, and Gaussian membership functions in both input and output are used .Fig. 8 unit step response for “Triangular” membership function
Fig. 10 unit step response for “Trapezoidal” membership function
Fig. 11 unit step response for “Pi” membership function
Fig. 12 unit step response for “Gaussian” membership function
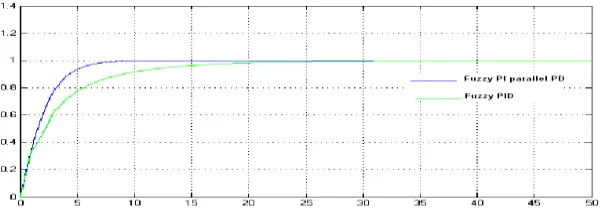
As a second example consider a non-linear system described by the equation
y
= -y (t) +y
(
t
)
+ u (t) and unit step responses are shown in Fig. 13 to Fig. 17, with different membership functionsFig. 14 unit step response for “Gbell” membership function
Fig. 15 unit step response for “Trapezoidal membership function
Fig. 16 unit step response for “Pi” membership function
Fig. 17 unit step response for “Gaussian” membership function
Next consider the non-linear system described by the equation
y
= y (t) + u (t) + sin 2(y
(
t
)
). The unit step responses for this non-linear system are shown in Fig. 18 to Fig. 22, with different membership functions.Fig. 19 unit step response for “Gbell” membership function
Fig. 20 unit step response for “Trapezoidal” membership function
Fig. 21 unit step response for “Pi” membership function
Fig. 22 unit step response for “Gaussian” membership function
7. Conclusions
We have described the design principle of a Parallel combination of fuzzy PI & PD controller and also the analytical input and output relations are derived using triangular membership functions. The parallel combination of fuzzy PI & PD controller is a discrete time fuzzy version of the parallel combination of conventional PI & PD controller. The results demonstrate that the parallel combination of fuzzy PI & PD controller shows the better control performance than fuzzy PID controller.
8. References
[1] Zadeh, L. A (1965). Fuzzy sets. Inf. Control, 8 , pp-338-353.
[3] Sugeno, M, (1985). Industrial applications of fuzzy control, Amsterdam: North-Holland.
[4] G. Chen and H. Yang, “On the stability of fuzzy PI control systems,” in proc. 3rd internat. Conf. on Fuzzy Logic Applications, Dec 1993, pp.128-133.
[5] H. A. Malki, H.Li, and G. Chen, “New design and stability analysis of fuzzy proportional-derivative control systems,” IEEE Transactions on Fuzzy systems, vol. 2, no.4, pp 245-253, 1994.
[6] D. Misir, H.A.Malki and G.Chen, “Design and analysis of a Fuzzy proportional-integral-derivative controller,” Fuzzy set and systems, Vol.79, pp 297-314, 1996.