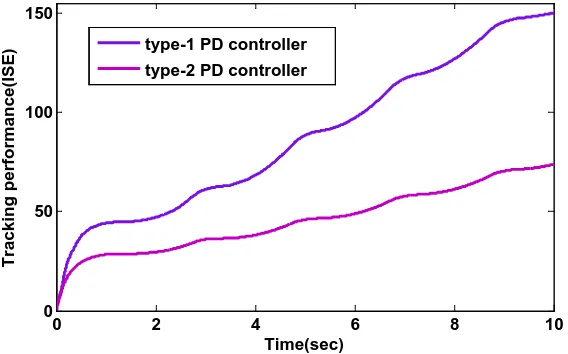
Interval Type 2 Fuzzy PD Tracking Control of Flexible Joint Robots
Full text
Figure






Related documents
Levels of natriuretic peptides increase significantly in diseases and disorders such as congestive heart failure and pulmonary hypertension, that is why natriuretic peptides were
and cationic surfactant (benzyltriethylammonium), via dip-coating to achieve multilevel re-entrant structures. Grafted SiNPs were then coated with fluoroalkylsilane to
Follow verification process to prevent outside entities from adjusting content Establish fluent communication process with staff to aid in verification process Promote special
In this paper, we focused on the emotional labor that women instructors in a research university do particularly when teaching issues of gender, race, class, and culture and
Kırkgöz Kaynağı (Antalya-Türkiye)’nda Yaşayan Aphanius mento (Heckel in: Russegger, 1843) (Osteichthyes: Cyprinodontidae)’nun Üreme
Keywords: amenability; Banach function algebra; extended Lipschitz algebra; point derivation; weak amenability.. 2010 MSC: Primary 46J10; Secondary
Gen- ome wide association studies have shown independent single-nucleotide polymorphisms (SNPs) correlate with an increased risk of DLBCL [7, 8]. We report a woman with no
Spectrum investors receive asset allocation, discretionary investment management and trade execution services with respect to the assets invested in the accounts (“the
