A COMBINED OPTIMIZATION METHOD FOR COMMON RAIL DIESEL ENGINES
Arturo de RisiUniversità di Lecce Dipartimento di Ingegneria dell’Innovazione, 73100 via Arnesano, Lecce - Italy
Paolo Carlucci
Università di Lecce -Dipartimento di Ingegneria dell’Innovazione, 73100 via Arnesano, Lecce - Italy Teresa Donateo
ISUFI - Innovative Materials and Technologies - Università di Lecce,
73100 via Monteroni, Lecce – Italy
Antonio Ficarella
Università di Lecce -Dipartimento di Ingegneria dell’Innovazione, 73100 via Arnesano, Lecce - Italy
ABSTRACT
The optimization method proposed in the present study consists of a multi-objective genetic algorithm combined with an experimental investigation carried out on a test bench, by using a DI Diesel engine.
The genetic algorithm selects the injection parameters for each operating condition whereas the output measured by the experimental apparatus determines the fitness in the optimization process. The genetic algorithm creates a random population, which evolves combining the genetic code of the most capable individuals of the previous generation. Each individual of the population is represented by a set of parameters codified with a binary string. The evolution is performed using the operators of crossover, mutation and elitist reproduction. This genetic algorithm allows competitive fitness functions to be optimized with a single optimization process. For the determination of the overall fitness function the concept of Pareto optimality has been implemented.
In this work, the input variables used for the optimization method are injection parameters like start of pilot and main injection, injection pressure and duration. The engine used is a FIAT 1929 cc DI diesel engine, in which the traditional injection system has been replaced by a common rail high pressure injection system.The competitive fitness functions were determined based on the measured values of fuel consumption, emissions levels (i.e. NOx, soot, CO, CO2, HC); combustion noise
and overall engine noise, for each operating conditions. The optimization was performed for different engine speed and torque conditions typical of the EC driving cycles.
INTRODUCTION
New limitations in terms of pollutant emission, noise emissions and fuel consumption require the possibility to freely regulate operating parameters of the engine as a function of driving conditions. The use of common rail injection systems offers full freedom in the choice of the injection parameters and quantities such as pilot and main injection timing and durations, injection pressure are calculated by means of internal maps, as a function of the engine operating conditions. However, this large flexibility introduces the problem of optimizing E.C.U. maps which use a large number of controlling parameters.
Many authors dealt with the problem by modeling the engine behavior through experimental analysis or CFD codes. Different optimization methods can be used to minimize fuel consumption and emissions. Dimopoulos et al. [1] used stationary emission and consumption models based on experimental results to describe engine behavior as function of injection parameters and boost pressure. They applied statistical experimental design to reduce the number of conditions to be tested, and sequential quadratic programming as multiobjective optimization tool. The same approach has been also followed in a commercial optimization software [2]. However, statistical methods require a large number of experimental or numerical results. In particular, for an n-variable system, where each n-variable is varied on m levels, the number of experiments required for a complete Design of Experiment (DOE) is equal to mn. Moreover,
the trends obtained in this way cannot be extended beyond the range of variation chosen for each parameter. To overcome this limitation, the engine behavior can be modeled by neural networks. An example of such an
approach is given in [3] where the engine noise emissions were predicted as a function of the injection parameters on a wide range of operating conditions. On the other hand, the number of cases required for the neural networks training phase increases dramatically by increasing input and output variables. Moreover, neural network capability in predicting engine behavior depends on the number of hidden layers and neurons and activation function used during the training process. Thus, each application calls for accurate analyses before building the appropriate neural network.
Compared with other optimization techniques, GAs main advantages rely on the implicit parallelism of the optimum search process and the independence of the kind of problem to solve. In fact, GAs search from a population of points, not a single point and the only relations between the current application and the GA are the objective function and the parameters' coding in binary strings. Thus, a genetic algorithm does not need any adaptation to the particular system to optimize. This feature differentiates GAs from both Design of Experiment and Neural Networks. On the other hand, some optimization techniques can be more robust than GAs in particular applications even if they require auxiliary information about the problem, e.g continuity and derivability of the fitness function. Recently genetic algorithms have been introduced to optimize engine performances. Edwards et al. [4] used engine models resulting from statistical experimental design as evaluation method for a standard single-objective algorithm. Senecal et al. [6-8] developed a KIVA-GA computer code which performs CFD engine simulations in the framework of a multiobjective genetic algorithm. In these studies, several control variables affecting engine performances, including start of injection, and split injection rate-shape were considered. The effect of injection pressure was also considered by changing the injection duration. By combining fuel consumption, soot, NOx and HC levels in a single overall fitness
function, Senecal et al. found an optimum engine configuration. This optimum design resulted in a reduction of both fuel consumption and emissions levels. It is characterized by a slightly advanced start of injection, an higher injection pressure, more mass in the first injection pulse and a shorter dwell between injections, compared with the split injection baseline case. However, the range of variation chosen by Senecal et al. [6] for the injection advance is quite limited. In the present investigation the ranges of variation of pilot and master injections were increased and cases of injection starting at 40 deg BTDC were also considered. Simulation codes can hardly perform this kind of investigation. For example, the Shell autoignition model implemented in the KIVA3V code shows its limits when applied to early pilot injections for the underestimation of the effects of the low temperature chemistry [11].
The approach followed in the present investigation differs from all referred studies in the use of an experimental test bench instead of engine models in the optimization process. In this way, the limits of neural network and CFD modeling are overcome. The multiobjective genetic algorithm used for the optimization process has been presented and tested in [5]. It differs from the algorithm used by Senecal et al. [6-7] in that competitive engine performance parameters are not combined in a single function. Fuel consumption, NOx emissions and particulate levels are considered as targets to minimize and the overall fitness of each individual is calculated by ranking the population according to Pareto optimality. This method has been found [5] to give better results than a combination of the same parameters in a fitness function. A short description of the optimization method is reported in the following section.
NOMENCLATURE
Aim Main Injection Timing Aip Pilot Injection Timing
D Dwell time
ETM Main Energizing Time ETP Pilot Energizing Time f1, f2, f3 Single fitness functions
fp Noise penalty function
FR Overall fitness function
Pinj Injection Pressure
Qc Fuel injected volume
r(j) rank of individual j SPL Sound Pressure Level subscript
0 baseline value (without pilot injection) THE MULTI-OBJECTIVE GENETIC ALGORITHM
The algorithm starts from a random initial population of binary strings, which codifies a combination of parameters to be evaluated. Then, the algorithm calculates the fitness of each individual according to each single objective to be optimized and individuals are ranked according to Pareto optimality criterion. According to Pareto optimality, a vector x is partially less (<p) than
y when:
)
(
)
(
x
iy
ii
x
iy
ii
p
⇔
∀
≤
∧
∃
<
<
y
x
(1)
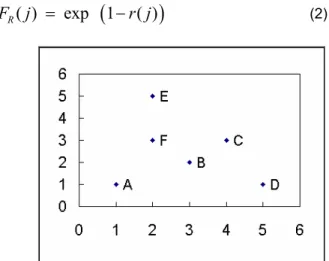
If the condition (1) is verified, y is said to dominate x. If a vector is not dominated by any other, it is non dominated or not inferior. For instance, points E, C and D in Figure 1, are not dominated. According to this definition, it is possible to rank an individual by considering the number of individuals by which it is dominated, increased by one.
Thus, the non dominated individuals (E, C, D) of figure 1 have rank equal to 1 (non dominated points), B and F has rank equal to 2 and 3, respectively and point A, being dominated by all other points, has rank equal to 6. The overall fitness of individual i is calculated according to its rank by using equation (2).
(
)
( )
exp 1
( )
R
F j
=
−
r j
(2)Figure 1 –Example of multiobjective optimization
The best individuals, i.e. the strings with higher overall fitness values, are selected for reproduction with the tournament method and their chromosomes are exchanged with the single point crossover technique. The elite strategy is performed by replacing somestrings from the new population with individuals extracted from the set of Pareto optimal solutions of the previous generation (non dominated individuals). The new generation is used as starting generation and all the above phases are repeated [5].
To achieve a larger diversity in the evaluated strings during the optimization process, a micro-Ga (
µ
GA
) has been used. A micro-GA works with a very small number of individuals (five individuals) and checks the convergence of the population by calculating the difference in bits of all individuals. If the difference is less than a prefixed value (5%), i.e. if all individuals are represented by quite similar strings, the best individual is preserved and the remaining strings are randomly determined. Carroll [9] found that micro-GAs perform better than standard GA because they require a lower number of evaluations to reach the same results. A test performed by the authors [10] put in evidence that micro-GAs allow a very good definition of the Pareto front in the case of multi-objective optimization for a given number of evaluations.EXPERIMENTAL SETUP
The engine used during tests was a 2-liter, on-line 4-cylinders, four strokes, with turbocharger and intercooler, direct injection FIAT diesel engine, with a common rail high pressure injection system (1350 bar of maximum injection pressure). The engine was coupled to an eddy current dynamometer by means of a flexible coupling. An exhaust gas analyzer was used to measure CO, CO2, O2,
HC and NOx concentrations whereas particulate was
measured by an opacimeter. Exhaust gases were sampled at the muffler exit.
Sound Pressure Level (SPL) was measured by means of an environmental microphone located 1 meter from the engine, on the opposite side with respect to the exhaust and turbocharger system. Equivalent Sound Pressure Level, Leq, A-weighted was calculated by integrating SPL
over a 20 ms interval. Experimental tests were carried out in a reverberant room. Data were acquired only after the engine had reached steady-state operating conditions, therefore no transient information has been analyzed.
CHOICE OF THE OPERATING CONDITIONS
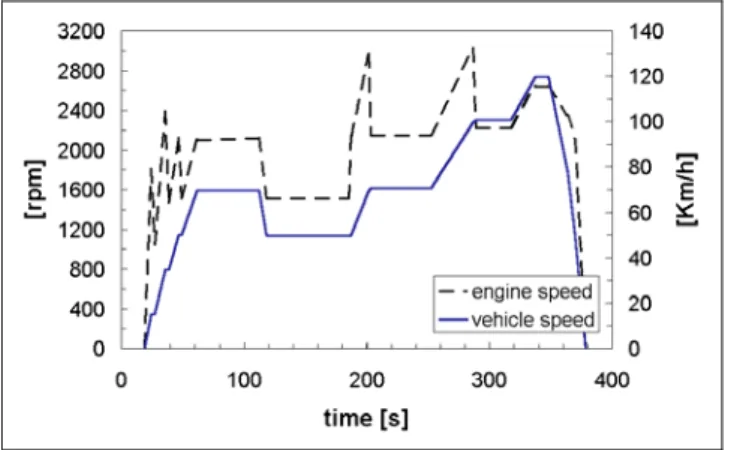
The global driving test defined by European Legislation for emissions measurement includes four ECE and one EUDC cycles. In particular, the solid line of Figure 2 represents the ECE urban reference cycle while the EUDC extra-urban cycle is plotted in the same way in Figure 3.
Figure 2 - ECE driving cycle
Using the transmission ratios of a five speeds compact car, the vehicle velocity was correlated to the engine speed, as reported in Figure 2 and Figure 3 with dashed lines. For the most frequently recurring values of engine speeds, over the global driving test, the corresponding engine torque was computed. This was done by estimating the resistance due to the aerodynamic forces
acting on the car. The organic efficiency was determined by the value of engine power declared by the car manufacturer for a car speed of 100 km/h. This procedure allowed a good estimation of the dissipative forces acting on the car, but did not give useful information for idling condition.
Figure 3 - EUDC driving cycle
Thus, idle was not considered in the present optimization. From the above considerations, the two operating points of Table 1 were identified.
Operating condition Speed [rpm] Torque [Nm]
1 1500 14.4
2 2200 10.0
Table 1 – Operating conditions OPTIMIZATION METHODOLOGY
Pilot injection is commonly used to control pollutant emissions and engine noise. However, the effect of pilot injection on engine performance strongly depends on several parameters, including the amount of fuel injected during the first pulse, the pilot and master injection timing. Injection pressure is also an important parameter in the engine optimization process. The influence of these parameters has been taken into account in the optimization process by selecting the control variables, as given in Table 2.
The range of variation of the control factors has been chosen so that GA could investigate all technically available solutions. The percentage of fuel injected during the pilot pulse is controlled by selecting the corresponding solenoid energizing time.
The master advance (AiM) is calculated from the pilot advance and the dwell time, which is defined as the time between the end of the pilot pulse and the start of the main injection. Note that the steps of variation allowed for each parameter are limited by the controlling capability of the ECU. Thus, in the present investigation they could be furtherly reduced. Each control parameter has been coded with a binary string in the GA framework. Once engine runs were performed, fuel consumption, engine noise, NOx and particulate emission levels were returned as merit functions to the GA.
Parameter Description Range Step
Pinj Injection
pressure 600-1100 [bar] 16 [bar]
Aip Pilot injection
timing
10-42 DCA BTDC 0.5 [deg]
D Dwell time 250-1850 [µs] 6 [µs]
ETP Pilot energizing
time 150-400 [µs] 4 [µs]
Table 2 – Control parameters variation ranges
The optimization process aims at finding pilot injection strategies which improve engine behavior with respect to a reference condition. This was achieved by setting as baseline the “no pilot” injection strategy which ensured the values of torque and speed corresponding to the operating conditions of Table 1. The injection control parameters corresponding to these single pulse injection baseline cases are reported in Table 3 for conditions 1 and 2. Fuel consumption, emission levels and engine noise are also reported. Three fitness functions have been defined according to engine results and baseline values:
( )
0 1 f fQ
f
Q
=
(3)(
)
0 2 x xNO
HC
f
NO
HC
+
=
+
(4)(
)
0 2particulate
f
particulate
=
(5)The subscript 0 in equations (3) - (5) refers to the results obtained with the baseline case reported in Table 3 for each operating condition.
Operating
condition Speed [rpm] Torque [Nm] °BTDC Aim [mm3/c]Qc [bar] Pinj (NOx)[ppm] 0 (particulate)[% opacity] 0 (HC)[ppm] 0 (Noise)[dB(A)] 0
1 1500 14.4 4.5 8.9 428 142 8.9 23 88.6
2 2200 10.0 5 7.9 510 121 9.5 19 93.1
Table 3 – Baseline parameters
As far as engine noise is concerned, a penalty function defined as eq. (6) has been introduced to reduce the fitness functions of individuals which produce noise levels higher than baseline value.
(
)
0 1 101.1 10
noise noise pf
− −=
−
(6)For each operating condition 75 generations were run; the results obtained by the GA have been compared with the original pilot strategy implemented in the common rail control map to test the validity of the optimization method proposed in the present investigation.
DISCUSSION OF RESULTS
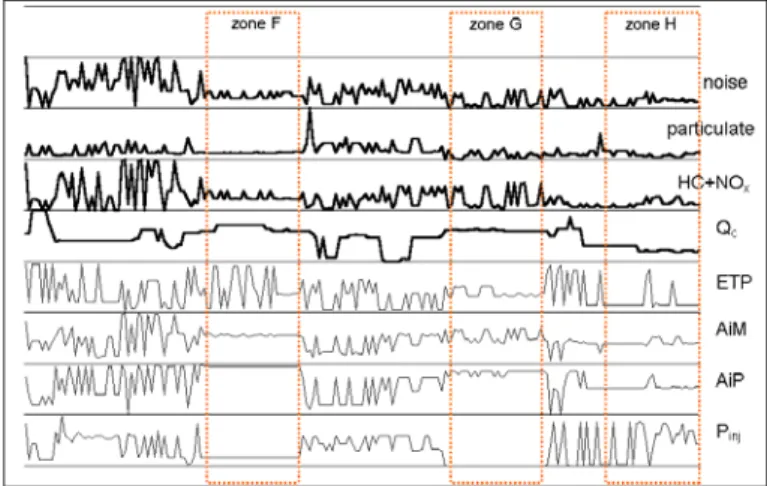
The normalized evolution of engine performance and control variables, as recorded during the optimization process, is reported in Figure 4 and Figure 5. These trends show some flat tracts corresponding to the GA convergence on local optima. In particular, four convergence zones (called zone A, B, C and D) have been found for the first operating condition, and three zones F, G and H for the operating condition 2.
Figure 4 - Recorded input and output trends for operating condition 1
After these tracts, the values of the input parameters start to fluctuate again due to the micropopulation restart. From these plots some considerations about the
influence of each injection parameter on specific fuel consumption, exhaust emissions and combustion noise can be deduced. In order to study the effect of each parameter on output functions, a statistical correlation between each couple of input and output parameter was performed. Table 4 and Table 5 show the correlation factor between input and output parameters for operating condition 1 and 2, respectively.
Figure 5 - Recorded input and output trends for operating condition 2 Qc HC + NOx Particulate Noise Pinj - 0.105033 0.128836 0.339242 0.412397 AiP 0.173746 0.477365 - 0.039922 0.500587 AiM 0.08143 0.571492 - 0.100153 0.617208 ETP 0.784001 0.210037 0.074814 0.09245
Table 4 – Correlation between input and output parameters for operating condition 1
Qc HC + NOx Particulate Noise
Pinj - 0.470959 0.016836 0.023261 0.254596
AiP 0.267093 0.384444 - 0.526451 0.070442 AiM 0.221497 0.753008 - 0.527693 0.381573 ETP 0.832649 0.234658 - 0.09743 0.201442
Table 5 - Correlation between input and output parameters for operating condition 2
For the operating condition 1, AiM, AiP and Pinj are
important control parameters in terms of combustion noise, while pilot injection duration (ETP) has the lowest effect. However, for operating condition 2, AiP becomes the least effective parameter, and the influence of ETP increases (see Figure 5). Zones A-H of Figure 4 and Figure 5 show the optimized configurations. For condition 1, engine noise has a global minimum in zone C which corresponds to a decrease of AiM e Pinj without variations of ETP and AiP, compared with zone B. Zone D defines an optimized configuration characterized by higher noise levels with respect to the minimum level of zone C against a decrease levels of HC+NOx emission and specific fuel consumption obtained by reducing pilot timing and duration. This dependence is confirmed by results of operating condition 2.
Particulate emissions reaches its minimum value in correspondence of zone C for operating condition 1 and zone G for condition 2. In both cases an increase of particulate emission is paid to optimize fuel consumption and HC+NOx quantities by decreasing ETP, AiM and AiP values.
The role of injection pressure in the optimization of noise and particulate emissions seems to be very sensitive to the other parameters. In fact, the optimal sets of parameters identified in Figure 4 and Figure 5 are not obtained with an unique value of the injection pressure. As far as HC+NOx levels are concerned, note that the evolution of these pollutant emissions follows the AiM trend for both operating conditions; the pilot injection timing (AiP) exerts its effect on HC+NOx, and this influence is more evident in condition 2. This is evident both from recorded traces and correlation coefficients. Specific fuel consumption is mainly affected by pilot energizing time, although in condition 2 the reciprocal influence of various parameters is more complex.
OUTPUT OPTIMIZATION
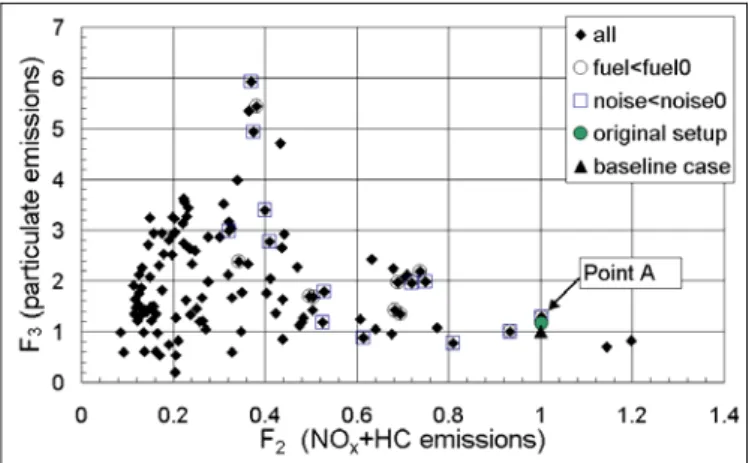
The results of GA optimization have been reported in the plane f2 - f3 , i.e. the fitness functions defined according to
(NOx + HC) and particulate emissions, because pollutant emissions reduction is assumed to be the most important goal. However, the other optimization goals are taken into account and individuals giving a reduction of fuel consumption or noise level compared with the baseline case are marked with circles or squares, respectively. Since greater values of fitness function correspond to lower values in emission levels, the points characterized by f2>1 and f3>1 perform better than baseline setup. Of
course, it is interesting to compare these results with the performances of the pilot injection strategy implemented
in the original engine maps (original setup), represented with a full circle point in the plane f2 - f3. Figure 6 shows
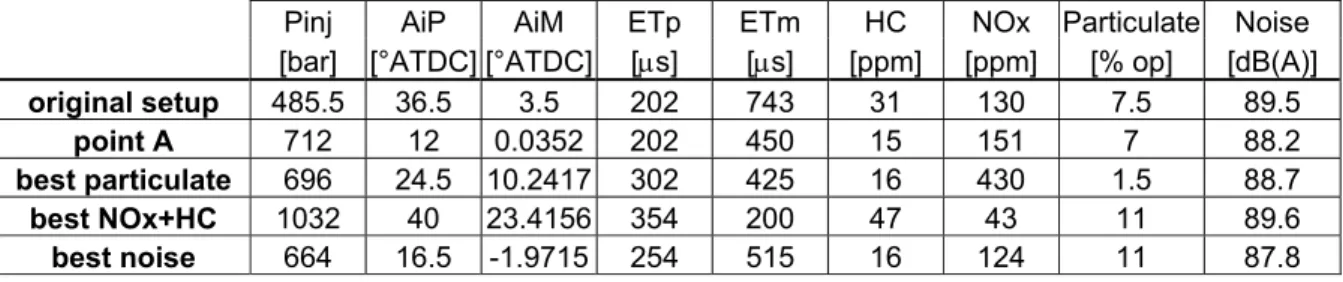
results for condition 1; note that the GA was able to find a set of operating injection variables (point A) that gives higher fitness values than original setup and lower values of specific fuel consumption and environmental noise emissions. Injection parameters values and corresponding optimization function levels for the point A are reported in Table 6.
In the case of operating conditions 2, two sets of injection variables (point B and C) have been chosen; both are effective in reducing Brake Specific Fuel Consumption (BSFC) and environmental noise compared with original setup. In particular, point B gives a reduction of 22% in particulate levels, while point C decreases HC emissions by about 50%.
Figure 6 – Results for operating condition 1
Injection parameter values and corresponding optimization function levels for the point B and C are reported in Table 7.
The choice of a particular configuration from Table 6 and Table 7 depends on the particular engine application. For instance, some users can consider particulate emissions reduction more important than NOx levels according to the availability and efficiency of NOx catalysts. This
proves the importance of using a multi-objective optimization strategy based on rank method instead of combining all goals in a single fitness function.
Pinj AiP AiM ETp ETm HC NOx Particulate Noise
[bar] [°ATDC] [°ATDC] [µs] [µs] [ppm] [ppm] [% op] [dB(A)]
original setup 485.5 36.5 3.5 202 743 31 130 7.5 89.5
point A 712 12 0.0352 202 450 15 151 7 88.2
best particulate 696 24.5 10.2417 302 425 16 430 1.5 88.7
best NOx+HC 1032 40 23.4156 354 200 47 43 11 89.6
best noise 664 16.5 -1.9715 254 515 16 124 11 87.8
Table 6 – Original and optimized configurations for condition 1
Pinj AiP AiM ETp ETm HC NOx Particulate Noise
[bar] [°ATDC] [°ATDC] [µs] [µs] [ppm] [ppm] [% op] [dB(A)]
original setup 611 43 6 192 581 25 105 8.3 93.5 point C 856 15.5 -5.2436 186 360 12 105 8 93.2 point B 856 28 3.0103 198 410 17 117 6.5 92.5 best particulate 616 37.5 19.0013 274 562 15 539 3.9 94.6 best NOx+HC 904 24 -3.0864 202 420 11 75 9.4 96.6 best noise 856 28 3.0103 198 350 17 117 6.5 92.5
Table 7 - Original and optimized configurations for condition 2
CONCLUSIONS
A new optimization method consisting of a multi-objective genetic algorithm which controls a test bench has been proposed.
The optimization method was tested for different engine speed and torque conditions typical of the EC driving cycles. In order to reduce the convergence time, a micro-GA approach was implemented. The input variables taken into account in the engine optimization were pilot and main timings, injection pressure and duration. The competitive fitness functions were determined on the basis of the measured values of fuel consumption, emissions levels (i.e. NOx, particulate, HC) and overall engine noise.
The results reported in the present investigation proved the effectiveness of using experimental investigations as evaluation method for GAs optimization. In fact, optimized
injection strategies were found for all tested operating conditions.
ACKNOWLEDGMENTS
The financial support to this research was partially provided by the Italian Ministry for Instruction, University and Research (MIUR) and by the CNR under contract N. CNRG00718A.
REFERENCES
1. Dimopoulos, P. , Schöni, A., Eggimann, A., Sparti, C. , Vaccarino, E., Operti, C. , “Statistical Methods for Solving the Fuel Consumption/Emission Conflict on DI-Diesel Engines”, SAE Paper 1999-01-1077, 1999 2. Ramschak,E., Schöggl, P., Andrew M. Gallacher,
Brustolin, G., “Cameo and Drive – New Software Tools for the Calibration of Engine Control Unit at the Test Bench”, 5th International Conference on Internal Combustion Engines, Capri 23-27 September 2001
3. Carlucci, P. , Ficarella, A., Laforgia, D., “Study of the Influence of the Injector Parameters on Combustion Noise in a Common Rail Diesel Engine Using ANOVA and Neural Networks” SAE Paper 2001-01-2011, 2001
4. Edwards, S. P. , Pilley, A.D. , Michon, S. , Fournier, G., “The Optimization of Common Rail FIE Equipped Engines Through the Use of Statistical Experimental Design, Mathematical Modeling and Genetic Algorithms”, SAE Paper 970346, 1997
5. Donateo, T., de Risi, A., Laforgia, D., "Optimization of High Pressure Common Rail Electro-injector using Genetic Algorithms", SAE paper 2001-01-1980, 2001; 6. Senecal, P.K., Reitz, R.D., "Simultaneous Reduction
of Engine Emissions and Fuel Consumption using Genetic Algorithms and Multidimensional Spray and Combustion Modeling", SAE paper 2000-014-1890, 2000;
7. Senecal, P.K., Montgomery, D.T., Reitz, R.D., "Diesel Engine Optimization using Multi-Dimensional Modeling and Genetic Algorithms Applied to a Medium Speed, High Load Operating Condition", ASME-ICED 2000 Fall Technical Conference, 2000; 8. Wickman, D.D., Senecal, P.K., Reitz, R.D., "Diesel
Engine Combustion Chamber Optimization Using Genetic Algorithms and Multi-Dimensional Spray and Combustion Modeling", SAE paper 2001-01-0547, 2001;
9. Carroll, D.L., "Genetic Algorithms and Optimizing Chemical Oxygen-Iodine Lasers", Developments in Theoretical and Applied Mechanics, 18, 411, 1996; 10. De Risi, A., Donateo, T., Laforgia, D., "An application
of Multi-Criteria Genetic Algorithms to the Optimization of a Common-Rail Injector”, submitted to ASME-ICED 2002 Spring Technical Conference; 11. De Risi, A., Donateo, T., Laforgia, D., "A Preliminary
Study on the Effect of Low Temperature Kinetics on Engine Modeling", 5th International Conference on Internal Combustion Engines, Capri 23-27 September 2001;
12. Carlucci, P. , Ficarella, A., Laforgia, D., "Influence of the Injection Parameters on Combustion Pressure and Noise in a Common Rail Diesel Engine", Paper 01A3015, 3rd International Conference on Control and Diagnostic in Automotive Applications CD Auto 01, Sestri Levante, Genova (Italy), July 4 – 6, 2001; 13. Carlucci, P. , Ficarella, A., Laforgia, D., "Pilot Injection
Behavior and Its Effects on Combustion in a Common Rail Diesel Engine", International Workshop on Modeling, Emissions and Control in Automotive Engines MECA'01, Fisciano, Salerno (Italy), Sept. 9-10, 2001.