Design and Implementation of a Robot for Maze-Solving
using Flood-Fill Algorithm
Ibrahim Elshamarka
Department of Electrical and Electronic Engineering
Universiti Teknologi PETRONAS
31750 Seri Iskandar Malaysia
Abu Bakar Sayuti Saman
Department of Electrical and Electronic Engineering
Universiti Teknologi PETRONAS
31750 Seri Iskandar Malaysia
ABSTRACT
Autonomous navigation is an important feature that allows a
mobile robot to independently move from a point to another
without an intervention from a human operator. Autonomous
navigation within an unknown area requires the robot to
explore, localize and map its surrounding. By solving a maze,
the pertaining algorithms and behavior of the robot can be
studied and improved upon. This paper describes an
implementation of a maze-solving robot designed to solve a
maze based on the flood-fill algorithm. Detection of walls and
opening in the maze were done using ultrasonic range-finders.
Algorithm for straight-line correction was based on PI(D)
controller. The robot was able to learn the maze, find all
possible routes and solve it using the shortest one.
General Terms
Autonomous navigation, maze-solving, flood-fill algorithm,
ultrasonic sensor, PI(D) controller.
Keywords
Mobile robot, obstacle avoidance, microcontroller.
1.
INTRODUCTION
In mobile robotics, autonomous navigation is an important
feature because it allows the robot to independently move
from a point to another without a tele-operator. Numerous
techniques and algorithms have been developed for this
purpose, each having their own merits and shortcomings
[1-3,8].
Maze-solving – although artificial in terms of the confine that
the robot it subjected to – is a structured technique and
controlled implementation of autonomous navigation which is
sometimes preferable in studying specific aspect of the
problem [1]. This paper discusses an implementation of a
small size mobile robot designed to solve a maze based on the
flood-fill algorithm.
The maze-solving task is similar to the ones in the
MicroMouse competition where robots compete on solving a
maze in the least time possible and using the most efficient
way. A robot must navigate from a corner of a maze to the
center as quickly as possible. It knows where the starting
location is and where the target location is, but it does not
have any information about the obstacles between the two.
The maze is normally composed of 256 square cells, where
the size each cell is about 18 cm × 18cm. The cells are
arranged to form a 16 row × 16 column maze. The starting
location of the maze is on one of the cells at its corners, and
the target location is formed by four cells at the center of the
maze. Only one cell is opened for entrance. The requirements
of maze walls and support platform are provided in the IEEE
standard [2,3].
2.
RELATED WORKS
Dang and Song proposed “An Efficient Algorithm for Robot
Maze-Solving” which was based on flood-fill algorithm but
improved by reducing some steps not needed in certain cases.
As there are channels in the maze where the robot is forced to
go only straight forward, when the robot is inside these
channels, it does not need to perform all four steps of
maze-solving which is updating the wall, flooding the maze,
determining which turn to be taken and moving to the next
cell. To reduce execution time, it only flood the maze when
there is a turn [4].
“Partition-central Algorithm” is another maze-solving
algorithm where the standard 16×16 unit maze is virtually
divided into twelve partitions. The robot uses data such as its
direction and its current location to change between exploring
rules to save more time and optimize the solving process. A
simulation was developed to verify the algorithm. Test results
show that partition–central algorithm has higher average
efficiency when compared to other algorithms [5].
In another study, the discretely assigned potential levels were
discussed. Using these potential levels, the robot can
effectively make autonomous decisions to reach the goal. It
demonstrates the method of assigning and controlling these
artificial potentials to provide the most optimized path choices
while keeping the integrity of the potentials. The basic
algorithm is improved by saving information from previous
decisions that have been made [6].
3.
THE MAZE AND THE ROBOT
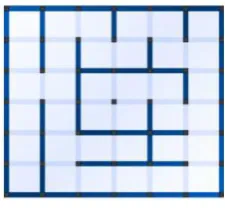
The maze designed for the robot to solve is of the size of 6×6
cells as shown in Figure 1. The actual maze constructed, as
shown in Figure 2, has a physical size of about 2.25 m
2. The
maze was designed so that it will have two paths in order
for it to be solved. One of the paths is longer than the other.
The robot (Figure 3) must decide which one of the paths is
shorter and solve the maze through that path.
[image:1.595.372.485.605.709.2]Fig 2: The maze
Fig 3: The robot
4.
ALGORITHM
Choosing an algorithm for the maze robot is critical in solving
the maze. In this exercise, flood-fill algorithm was chosen to
solve the maze due to its balance in efficiency and
complexity. There are four main steps in the algorithm:
Mapping, Flooding, Updating and Turning [2, 6-7]; which are
described in the following sub-sections.
4.1
Mapping The Maze
For the robot to be able to solve the maze, it has to know how
big the maze is and virtually divides them into certain number
of cells that can be used later in calculating the shortest path
to the destination. In this project, a maze of 6×6 cells is used.
Between two cells there can be a wall. Thus, in a row of six
cells, there are five walls in between them. In total, in a row,
there are eleven units of cells or walls. This information is
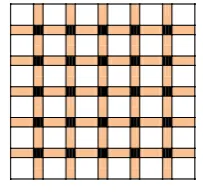
stored in an 11×11 array, as shown in Figure 4. The white
units are the cells which the robot can be placed inside. The
orange units are the locations for potential walls. The black
units indicate wall intersections which are ignored by the
algorithm. The external borders of the maze are also ignored
as they are fixed boundaries of the maze. Both cells (white)
and walls (orange) are set to zero in as their initial conditions.
Fig 4: Maze-mapping Array
4.2
Updating The Wall Data
Before the robot decides where it wants to move to, it has to
check if it is surrounded by any walls in any of the three
directions: right, left and front. The robot reads the distance of
any obstacle at each direction and check if the distance in each
is more than 20 cm. The ones that exceed 20 cm are updated
as “wall” on their respective side. This is illustrated by the
flow chart in Figure 5. For the robot to update the correct wall
data, it has to know first which direction it is facing. There are
four orientations for the robot to be facing: north, south, east
or west, as shown in Figure 6. Initial orientation was set at
start and the robot keeps tracking of any changes.
Fig 5: Flowchart for updating wall location at each cell
Fig 6: Change in array locations to update the wall based
on robot orientation
4.3
Flooding The Maze
After updating the wall information for the current cell, the
robot starts to flood the matrix to find the shortest path to the
goal [6]. The flow chart in Figure 7 shows how the robot
floods the matrix and makes decision by checking one cell at
a time. It does the same for all the cells and keeps repeating
for several times until a path between the robot and the goal is
found. The algorithm assigns a value to each cell based on
how far it is from the destination cell. Based on that, the goal
cell gets a value of 1. If the robot is standing on a cell with a
value of 4, it means it will take the robot 3 steps (3 cells) to
reach the destination cell. The algorithm assumes that the
robot can’t move diagonally and it only can make 90 degree
turns.
Let Ultrasonic_Right = 0, Ultrasonic_Left = 0, Ultrasonic_Front = 0
Read Ultrasonic_Right, Ultrasonic_Left, Ultrasonic_Front
Update Wall to the Right Yes
Yes
No No
Update Wall to the Left Yes
Yes
No No Is Ultrasonic_Right less than 20 cm
Update Wall Infront Yes
Yes
No No Is Ultrasonic_Front less than 20 cm
[image:2.595.326.533.451.566.2] [image:2.595.116.218.653.751.2]Fig 7: Flowchart for flooding the maze and finding the
path
4.4
Checking for Turns
[image:3.595.321.538.363.481.2]After the robot has decided which direction it will go next, it
returns the amount of degrees it needs to turn in order to go to
the cell intended (Table 1). After turning the robot, the
algorithm updates the new orientation of the robot, i.e. facing
north, south, east or west.
Table 1. Values returned by the algorithm and its
respective turn
Degrees
Turn needed
0
No turn
90
Turn Right
180
Turn back
270
Turn left
5.
HARDWARE DESIGN
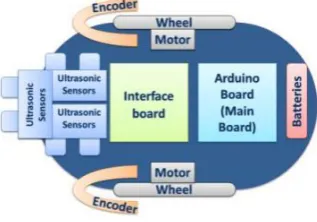
The robot has a length of 22 cm, a width of 15 cm and a
height of 15 cm. As illustrated in Fig 1, the robot is equipped
with three ultrasonic distance sensors facing front, left and
right to scan the area ahead for obstacles and specifically to
detect for walls. A wheel rotation encoder is placed near each
wheel so that the extend of how much the wheel is rotating
can be detected. With the diameter of the wheel is known, the
rotation can converted into distance traveled.
Fig 1: The robot design
5.1
Control board
Processing power is provided by an Arduino board. The
board is powered by ATmega328 which is a
microcontroller with 32 KB flash memory for storing the
code. The microcontroller can be programmed by
C-language-like “processing programming language.”
5.2
Obstacle Sensors
Three ultrasonic distance sensors were placed on the right, the
left and in front of the robot. Each ultrasonic sensor measures
the distance between the robot and any obstacle in
millimeters.
5.3
Wheel Rotation Encoder
[image:3.595.84.252.424.480.2]Each wheel is equipped with a sensor which is basically a pair
of infra-red transmitter and receiver. By counting the
holes in the wheel and knowing the wheel diameter, the
robot can encode the distance traveled. In this case, there are
eight holes in the wheel and the wheel diameter is 7.9 cm.
That means the distanced traveled is 24.8 cm (7.9×π) when
the wheel rotates a full cycle. Figure 9 shows the counting
based on one of the wheel rotation sensors. High sensor
reading is set to one and low reading is set to zero. The frame
in black represent a detection of one cell moved, which is 16
toggles between ones and zeros.
Fig 2: Wheel Rotation Detection Curve
5.4
Motor Drive
The two wheels are driven by a pair of servo motors which are
interfaced to the Arduino board through an L293D dual
H-bridge. An L293D can drive two servo motors or two DC
motors -- which can be controlled in both clockwise and
counter clockwise direction. It has output current of 600 mA
and peak output current of 1.2A per channel. The in-built
diodes protect the circuit from back EMF (Electro Magnetic
Force) at the
outputs. Supply voltage range vary from 4.5 V to
36 V, making L293D a flexible choice for a motor driver.
6.
ERROR DETECTION AND
CORRECTION
6.1
Moving in a Straight Line with a PI(D)
Controller
Due to the fact that the motors spin at slightly different speed
even when they have been calibrated, the robot tends to drift
to one side when it moves. For the robot to stay in the middle
of the corridor inside the maze, a PI controller was used to fix
the errors based on the inputs from the ultrasonic sensors. By
applying Ziegler-Nichols tuning method on the difference
between the distance detected by the left and right sensors [8].
With P-control, the ultimate gain, K
u= 4 and the ultimate
If Cell (x,y) is not a Wall AND not a Goal
Check cells at north, south, east, and west of cell (x,y)
If boundary node has a number in it and cell (x,y) is robot location
path found! find the boundary node with the
smallest number return that direction to robot
controller If boundry node
has a number in it
Cell (x,y) = number inside boundary node + 1
END Yes Yes
Yes Yes Yes
Yes
No
No
Define location of Goal cell and set it to = 1 x and y start from 0 to 10 with increment of 2
x is row number and y is column number
No No
-0.2 0 0.2 0.4 0.6 0.8 1 1.2
-100 0 100 200 300 400 500 600 700
0 50 100 150 200 250 300 350
Enc
oder
Mapping
1
or
0
Amoun
t of
IR
de
tect
ed
Time
Encoder Input and Mapping
[image:3.595.63.222.600.711.2]period, P
u= 0.893. Table 1 shows the pertinent values derived
[image:4.595.318.533.76.205.2]for P, PI and PID controls.
Table 1. Closed-Loop Calculations of Kp, Ti, Td
Kp
Ti
Td
P control
2
-
-
PI control
1.818
0.7445
-
PID control
2.353
0.4467
0.11167
After testing each controller and manually tuning the gain
parameters, PI controller was chosen for its smooth and
[image:4.595.56.278.230.363.2]fast response with K
p= 1.818 and T
i= 0.4.
Fig 3: PI controller response
6.1.1
Choosing input for the PI(D) controller
At any one cell, relative to the walls surrounding the robot,
there are four cases. The robot can be either between two
walls, one wall on the right side, one wall on the left side or
no wall on both sides This is illustrated in Fig 4. For all cases,
the PI controller tries to keep the robot in the middle.
When the robot is in the middle, it is approximately 8 cm
away from each wall. In case the robot does not detect a wall
on its right or left side, the robot uses the wheel rotation
encoder reading to move in straight line. It counts the number
of toggles in both right and left encoder and compares them
with each other.
Fig 4: Controller input in the three cases
6.2
Turning Left or Right Using Wheel
Rotation Encoders
There are three types of turning that the robot can make. It can
either turn 90 degrees to the right, 90 degrees to the left or 180
degrees to the rear. A few tests were conducted to measure
how many toggles the encoder will count before the robot
turns 360 degrees with both wheels having the same speed
and opposite direction of rotation. Based on the results it
was determined that a 90 degrees turn would equal to 5 or 6
toggles counted and a 180 degree turn would be equal to 11
toggles.
Fig 5: Wheel rotation encoder readings for 360º
6.3
Ultrasonic Sensor Readings
As the ultrasonic sensors were exhibiting some irregular
behavior when the distance detected is below 2 cm, extra tests
were done to find the range of the correct readings. The robot
was set to move straight with the PI controller and the
readings of both left and right sensors were recorded.
As shown in Fig 6, 1680 readings were recorded with
neglecting the readings that occurred less than 30 times.
The highest occurrence was the value of 161 millimeters
which occurred 1344 times. Based on that, the value of each
sensor was chosen to be 80 mm for the robot to be in the
middle between the two walls.
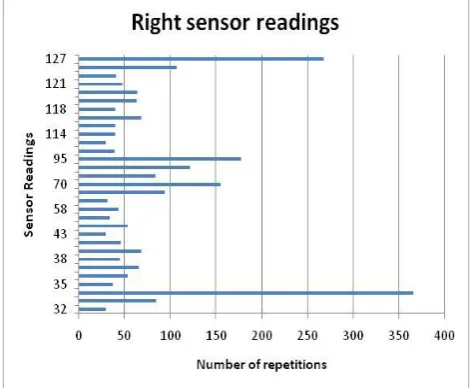
Another set of tests were done to find the accurate range for
each sensor alone. The robot was randomly moved away from
and close to a wall. 3680 readings were recorded with
neglecting the readings that occurred less than 30 times. Fig 7
shows that most of the occurrences happened at the values of
34 and 127. Based on that, the accepted range of readings
is set between 34 and 127. Any value outside this range is
neglected.
Fig 6: Sensor readings for the summation of right and left
sensors
-140 -120 -100 -80 -60 -40 -20 0 20 40
-20 -10 0 10 20 30 40 50
0 20 40 60 80 100 120 140 160 180 200
PWM PI Output
Input
-Diff
er
ence
be
tw
ee
n
righ
t a
nd
le
ft
sensor
in mm
PI controller with P=
1.818
I = 4
Input
Output
0 100 200 300 400 500 600 700
1 501 1001 1501 2001 2501 3001
Enc
oder
analogue
reading
Time
[image:4.595.316.553.454.648.2]Fig 7: Sensor readings of the right sensor
7.
RESULTS AND DISCUSSION
7.1
First Run
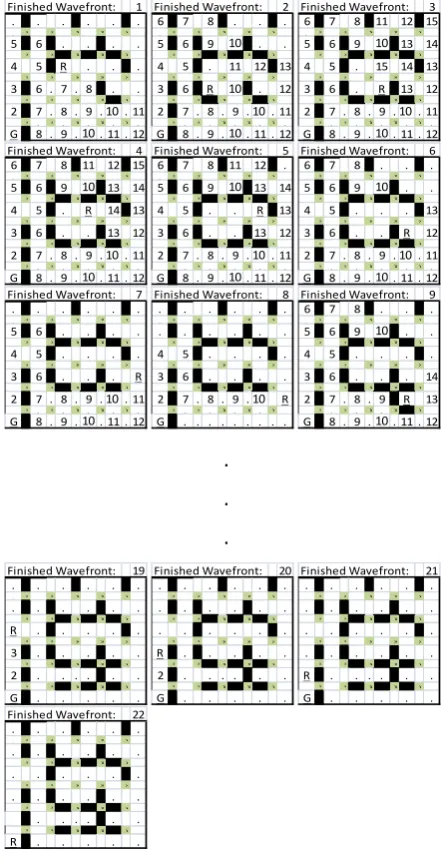
In its first run, the robot discovers the maze, map the walls
and find the target location. Each time it moves to a new cell,
its mapping matrix is updated with new information about the
existence of walls and the distance the cell is located from the
target. The distance is indicated by the number of steps
needed to move from a particular cells to the target. The first
6 steps and steps 19 & 20 are illustrated in Fig 8. Twenty
steps are required to reach the target cell. All cell and wall
data along the way are updated.
.
.
.
Fig 8: Mapping in first run requires 20 steps
7.2
Second Run
After reaching the target cell in its first run, the robot starts
heading back to its original starting point. It explores the
whole maze while continue mapping it by updating the wall
data and the distance each cell is from the target. Steps 1 to 9
and 19 to 22 are illustrated in Fig 9. It takes the robot 22 steps
to reach the starting point while seeking for an alternative
route so that the whole mapping matrix can be updated.
.
.
[image:5.595.315.536.176.609.2].
Fig 9: Return to start in second run requires 22 steps
7.3
Third run
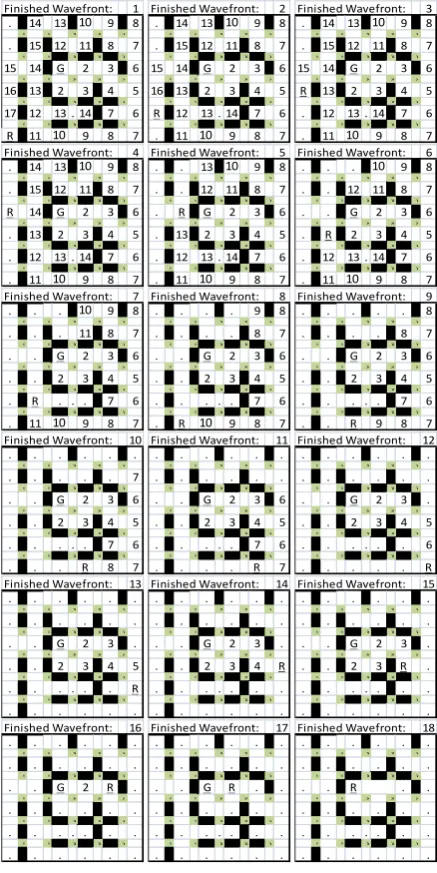
When the maze is fully mapped, the robot navigates the maze
to reach the goal through the shortest route using this data.
When deciding to move the next cell, it chooses the cell that
hold the smallest value. This is repeated until the target is
reached. This is illustrated in Fig 10.
Finished Wavefront: 1 . . . . 3 . 4 . 5 . 6 . x . x . x . x . x . . . 3 . 2 . 3 . 4 . 5 . x . x . x . x . x . 3 . 2 . G . 2 . 3 . 4 . x . x . x . x . x . 4 . 3 . 2 . 3 . 4 . 5 . x . x . x . x . x . 5 . 4 . 3 . 4 . 5 . 6 x . x . x . x . x . R W5 . 4 . 5 . 6 . 7
Finished Wavefront: 2 . . . . 3 . 4 . 5 . 6 . x . x . x. x . x . . . 3 . 2 . 3 . 4 . 5 . x . x . x. x . x . 3 . 2 . G . 2 . 3 . 4 . x . x . x. x . x . 4 . 3 . 2 . 3 . 4 . 5 x . x . x. x . x . R W4 . 3 . 4 . 5 . 6 x . x . x. x . x .
. W5 . 4 . 5 . 6 . 7
Finished Wavefront: 3 . . . . 3 . 4 . 5 . 6 . x . x . x . x. x. . . 3 . 2 . 3 . 4 . 5 . x . x . x . x. x. 3 . 2 . G . 2 . 3 . 4 x . x . x . x. x. R W3 . 2 . 3 . 4 . 5 x . x . x . x. x.
. W4 . 3 . 4 . 5 . 6 x . x . x . x. x. . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 4
. . . . 3 . 4 . 5 . 6 . x . x . x . x . x . . . 3 . 2 . 3 . 4 . 5 x . x . x . x . x . R 2 . G . 2 . 3 . 4 x . x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 5 . . . . 3 . 4 . 5 . 6 . x . x . x. x . x . . . 3 . 2 . 3 . 4 . 5 x x . x. x . x . . R WG . 2 . 3 . 4 x x . x. x . x . . W. . 2 . 3 . 4 . 5 x . x . x. x . x . . W. . 3 . 4 . 5 . 6 x . x . x. x . x . . W. . 4 . 5 . 6 . 7
Finished Wavefront: 6 . . 4 . 3 . 4 . 5 . 6 . x x . x . x. x . . WR W2 . 3 . 4 . 5 x x . x . x. x . . . WG . 2 . 3 . 4 x x . x . x. x . . W3 . 2 . 3 . 4 . 5 x . x . x . x. x . . W4 . 3 . 4 . 5 . 6 x . x . x . x. x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 19 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x . . WG R . W. x x . x x x . W. . . W. . x . x . x . xM x . W. . . . x . x . x . x . x . . W. . . .
Finished Wavefront: 20 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x . . WR . . W. x x . x x x . W. . . W. . x . x . x . xM x . W. . . . x . x . x . x . x . . W. . . .
Finished Wavefront: 1 . W. . W. . W. . x x x x x 5 W6 W. . W. . x xM xM xM x
4 5 WR . . W. x x x x x
3 W6 . 7 . 8 W. . x . x . x . xM x
2 W7 . 8 . 9 . 1 . 11 x . x . x . x . x . G W8 . 9 . 1 . 11 . 12 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM xM x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 2 6 W7 8 W. . W. . x x x x x 5 W6 W9 1 W. . x xM xM xM x
4 5 W. 11 12 W13 x x x x x 3 W6 WR 1 W. 12 x . xM x . xM x 2 W7 . 8 . 9 . 1 . 11 x . x . x . x . x . G W8 . 9 . 1 . 11 . 12 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM xM x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM xM x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 3 6 W7 8 W11 12 W15 . x x x x x 5 W6 W9 1 W13 14 x xM xM xM x 4 5 W. 15 14 W13 x x x x x 3 W6 W. R W13 12 x . xM xM xM x 2 W7 . 8 . 9 . 1 . 11 x . x . x . x . x . G W8 . 9 . 1 . 11 . 12 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM xM x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 4
6 W7 8 W11 12 W15 . x x x x x 5 W6 W9 1 W13 14 x xM xM xM x 4 5 W. R 14 W13 x x x x x 3 W6 W. . W13 12 x . xM xM xM x 2 W7 . 8 . 9 . 1 . 11 x . x . x . x . x . G W8 . 9 . 1 . 11 . 12 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM xM x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 5 6 W7 8 W11 12 W. . x x x x x 5 W6 W9 1 W13 14 x xM xM xM x 4 5 W. . R W13 x x x x x 3 W6 W. . W13 12 x . xM xM xM x 2 W7 . 8 . 9 . 1 . 11 x . x . x . x . x . G W8 . 9 . 1 . 11 . 12 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM xM x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 6 6 W7 8 W. . W. . x x x x x 5 W6 W9 1 W. . x xM xM xM x
4 5 W. . . W13 x x x x x 3 W6 W. . WR 12 x . xM xM xM x 2 W7 . 8 . 9 . 1 . 11 x . x . x . x . x . G W8 . 9 . 1 . 11 . 12 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM xM x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 7
. W. . W. . W. . x x x x x 5 W6 W. . W. . x xM xM xM x
4 5 W. . . W. x x x x x
3 W6 W. . W. R x . xM xM xM x 2 W7 . 8 . 9 . 1 . 11 x . x . x . x . x . G W8 . 9 . 1 . 11 . 12 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM xM x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 8 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x
4 5 W. . . W. x x x x x
3 W6 W. . W. . x . xM xM xM x
2 W7 . 8 . 9 . 1 R x . x . x . x . x G W. . . . Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM xM x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 9 6 W7 8 W. . W. . x x x x x 5 W6 W9 1 W. . x xM xM xM x
4 5 W. . . W. x x x x x
3 W6 W. . W. 14 x . xM xM xM x 2 W7 . 8 . 9 WR 13 x . x . x . xM x G W8 . 9 . 1 . 11 . 12 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 19 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x R . W. . . W. x x x x x
3 W. W. . W. . x xM xM xM x
2 W. . . . W. . x xM xM xM x G W. . . . .
Finished Wavefront: 20 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x
. . W. . . W. x x x x x R W. W. . W. . x xM xM xM x
2 W. . . . W. . x xM xM xM x G W. . . . .
Finished Wavefront: 21 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x . . W. . . W. x x x x x . W. W. . W. . x xM xM xM x R W. . . . W. . x xM xM xM x G W. . . . . Finished Wavefront: 22
. W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x
. . W. . . W. x x x x x
. W. W. . W. . x xM xM xM x
[image:5.595.56.275.430.684.2]Fig 10: Third run requires 18 steps
Compared to the first run where the robot was still learning
the maze, in the final run, the robot takes two less steps
because it already learned about the whole maze and knows
the shortest path to the target cell.
8.
CONCLUSION &
RECOMMENDATIONS
This exercise is a study about the ability to equip a small
mobile robot with the ability to learn how to navigate in
unknown environment based on its own decisions. The
flood-fill algorithm was found to be an effective tool for
maze-solving of a moderate size. For the robot to make its decisions
it relies on inputs from several sensors, namely the ultrasonic
range sensors and wheel rotation decoders. The robot is able
to correct its orientation errors arising from its physical
motion within the maze using a PI controller.
The robot has successfully able to map the maze in the first
and second runs. In its third run it reaches its target cell
through the shortest route it has mapped in the previous two
runs.
Future works may include but not limited to studying the
robot’s maze-solving capability in a bigger and more complex
maze, in particular adaptable the robot is. The maze can be
designed and built to be reconfigurable so that the robot will
be faced with different challenge each time.
In order to improve the quality in wall detection and
self-correction, a better object sensor, such as a laser range finder,
can be employed. A laser range finder is much more costly
but provides the ability to the robot to scan its surrounding at
a wide angle plane instead of limited directional object
detection provided by ultrasonic sensors.
9.
REFERENCES
[1]
Verner, I.M. and D.J. Ahlgren, Robot contest as a
laboratory for experiential engineering education. J.
Educ. Resour. Comput., 2004. 4(2): p. 2.
[2]
Mishra, S. and P. Bande. Maze Solving Algorithms for
Micro Mouse. in Signal Image Technology and Internet
Based Systems, 2008. SITIS '08. IEEE International
Conference on. 2008.
[3]
Willardson, D.M., Analysis of Micromouse Maze
Solving Algorithm, in Learning from Data. 2001,
Portland State University.
[4]
Dang, H., J. Song, and Q. Guo, An Efficient Algorithm
for Robot Maze-Solving, in Proceedings of the 2010
Second International Conference on Intelligent
Human-Machine Systems and Cybernetics - Volume 02. 2010,
IEEE Computer Society. p. 79-82.
[5]
Cai, J., et al., An Algorithm of Micromouse Maze
Solving, in Proceedings of the 2010 10th IEEE
International Conference on Computer and Information
Technology. 2010, IEEE Computer Society. p.
1995-2000.
[6]
Wyard-Scott, L. and Q.H.M. Meng. A potential maze
solving algorithm for a micromouse robot. in
Communications, Computers, and Signal Processing,
1995. Proceedings., IEEE Pacific Rim Conference on.
1995.
[7]
Jianping, C., et al. A micromouse maze sovling
simulator. in Future Computer and Communication
(ICFCC), 2010 2nd International Conference on. 2010.
[8]
Kendre, S. S., P. V. Mulmule, et al. Navigation of PIC
based Mobile Robot using Path Planning Algorithm.
International Journal of Computer Applications. 2010
[9]
Choudhury, D.R., Process Control System, in Modern
Control Engineering. 2004, PHI Learning Pvt. Ltd. p.
323-351.
Finished Wavefront: 1 . W14 13 W1 9 W8 . x x x x x . W15 W12 11 W8 7 x xM xM xM x 15 14 WG 2 3 W6 x x x x x 16 W13 W2 3 W4 5 x xM xM xM x 17 W12 13 . 14 W7 6 x xM x
M x M x
R W11 1 9 8 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 2 . W14 13 W1 9 W8 . x x x x x . W15 W12 11 W8 7 x xM xM xM x 15 14 WG 2 3 W6 x x x x x 16 W13 W2 3 W4 5 x xM xM xM x R W12 13 . 14 W7 6 x xM x
M x M x
. W11 1 9 8 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 3 . W14 13 W1 9 W8 . x x x x x . W15 W12 11 W8 7 x xM xM xM x 15 14 WG 2 3 W6 x x x x x R W13 W2 3 W4 5 x xM xM xM x . W12 13 . 14 W7 6 x xM x
M x M x
. W11 1 9 8 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 4
. W14 13 W1 9 W8 . x x x x x . W15 W12 11 W8 7 x xM xM xM x R 14 WG 2 3 W6 x x x x x . W13 W2 3 W4 5 x xM xM xM x . W12 13 . 14 W7 6 x xM x
M x M x
. W11 1 9 8 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 5 . W. 13 W1 9 W8 . x x x x x . W. W12 11 W8 7 x xM xM xM x . R WG 2 3 W6 x x x x x . W13 W2 3 W4 5 x xM xM xM x . W12 13 . 14 W7 6 x xM x
M x M x
. W11 1 9 8 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 6 . W. . W1 9 W8 . x x x x x . W. W12 11 W8 7 x xM xM xM x . . WG 2 3 W6 x x x x x . WR W2 3 W4 5 x xM xM xM x . W12 13 . 14 W7 6 x xM x
M x M x
. W11 1 9 8 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7 Finished Wavefront: 7
. W. . W1 9 W8 . x x x x x . W. W. 11 W8 7 x xM xM xM x . . WG 2 3 W6 x x x x x . W. W2 3 W4 5 x xM xM xM x . WR . . . W7 6 x xM x
M x M x
. W11 1 9 8 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 10 . W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 8 . W. . W. 9 W8 . x x x x x . W. W. . W8 7 x xM xM xM x . . WG 2 3 W6 x x x x x . W. W2 3 W4 5 x xM xM xM x . W. . . . W7 6 x xM x
M x M x
. WR 1 9 8 7 Finished Wavefront: 10
. W. . W6 . 5 . 6 . x x x x . x . . W5 W. R W4 . 5 x xM x
M x . x . . 4 WG . 2 . 3 . 4 x x . x . x . x . . W3 . 2 . 3 . 4 . 5 x . x . x . x . x . . W4 . 3 . 4 . 5 . 6 x . x . x . x . x . . W5 . 4 . 5 . 6 . 7
Finished Wavefront: 9 . W. . W. . W8 . x x x x x . W. W. . W8 7 x xM xM xM x . . WG 2 3 W6 x x x x x . W. W2 3 W4 5 x xM xM xM x . W. . . . W7 6 x xM x
M x M x
. W. R 9 8 7 Finished Wavefront: 10
. W. . W. . W. . x x x x x . W. W. . W. 7 x xM xM xM x . . WG 2 3 W6 x x x x x . W. W2 3 W4 5 x xM xM xM x . W. . . . W7 6 x xM x
M x M x
. W. . R 8 7
Finished Wavefront: 11 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x . . WG 2 3 W6 x x x x x . W. W2 3 W4 5 x xM xM xM x . W. . . . W7 6 x xM x
M x M x
. W. . . R 7
Finished Wavefront: 12 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x
. . WG 2 3 W. x x x x x
. W. W2 3 W4 5 x xM xM xM x . W. . . . W. 6 x xM x
M x M x
. W. . . . R Finished Wavefront: 13
. W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x . . WG 2 3 W. x x x x x . W. W2 3 W4 5 x xM xM xM x . W. . . . W. R x xM x
M x M x
. W. . . . .
Finished Wavefront: 14 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x . . WG 2 3 W. x x x x x . W. W2 3 W4 R x xM xM xM x . W. . . . W. . x xM x
M x M x
. W. . . . .
Finished Wavefront: 15 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x
. . WG 2 3 W. x x x x x
. W. W2 3 WR . x xM xM xM x
. W. . . . W. . x xM x
M x M x
. W. . . . . Finished Wavefront: 16
. W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x . . WG 2 R W. x x x x x . W. W. . W. . x xM xM xM x . W. . . . W. . x xM x
M x M x
. W. . . . .
Finished Wavefront: 17 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x . . WG R . W. x x x x x . W. W. . W. . x xM xM xM x . W. . . . W. . x xM x
M x M x
. W. . . . .
Finished Wavefront: 18 . W. . W. . W. . x x x x x . W. W. . W. . x xM xM xM x
. . WR . W. x x x x x
. W. W. . W. . x xM xM xM x
. W. . . . W. . x xM x
M x M x