International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 6, June 2012)7
An Iterative Technique for Solving Nonlinear Optimal
Control Problems Using Legendre Scaling Function
Hatem Elaydi
1, Hussein Jaddu
2, Mohammad Wadi
3 1Islamic University of Gaza, Gaza, Palestine2Alquds University, Jersusalem, Palestine 3Islamic University of Gaza, Gaza, Palestine
Abstract— In this paper, wavelet based approach will be presented to solve nonlinear optimal control problem. The basis orthogonal functions will be Legendre scaling function. In addition, iteration technique will be used to converts nonlinear optimal control problems to a sequence of time-varying optimal control problems which are easier to solve than original problem. Numerical example will be solved by the proposed method to compare this approach with other research to show effectiveness of the proposed method.
Keywords—Wavelets, Legendre scaling functions, nonlinear optimal control problem, quadratic programming.
I. INTRODUCTION
For the last three decades, orthogonal functions and polynomials series [1-4] have been used in approximation methods to obtain the optimal solution of linear time invariant, time varying, and nonlinear systems. The main idea behind the approximation methods is reducing these problems to those of solving a system of algebraic equations; thus simplifying the original problems. Moreover, this technique is based on converting the differential equations into integral equations, then using the operational matrix of integration to eliminate the integration operator.
Recently, wavelets based methods have received considerable attention in the region of approximation and solving various problems of dynamic systems [5-7]. The main reasons for using wavelet functions are that they possess several useful properties such as orthogonality and rapid convergence. Thus, giving satisfactory and very effective results in approximating functions of discontinuities or sharp changes since they are not supported on the whole interval
a t
b
which is considered as advantage of wavelet functions.Generally, there are two basic methods that are used to solve optimal control problems, OCPs, the first is called indirect method in which optimal control problems are converted into two-point boundary value problem (TPBVP), then solved using Euler Lagrange technique or Hamilton-Jacobi-Bellman equation ( HJBE). However, the second method is called direct and it is based on discertization or parameterization.
Parameterization is concerned with using polynomials (orthogonal) in order the cost function and the constraints with these polynomials and the coefficients that make this representation valid. There are some disadvantages of indirect methods such as: (1) difficult to obtain exact solution of nonlinear OCPS using Euler Lagrange or HJBE; (2) using artificial costates
is increase problem computation; (3) complete knowledge of system model is needed. So; this urged researchers to use direct parameterization methods which based on orthogonal functions and polynomials.This paper presents a novel technique to solve the nonlinear optimal control problem by using Legendre scaling functions to parameterize the state and control for nonlinear optimal control problem combined with an iterative technique.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 6, June 2012)8
II. LEGENDRE SCALING FUNCTION
This paper presents Legendre scaling function proposed by Jaddu[7] as follows:
1
2
2
2
2
2
1
2
2
2
2
2
0
K K
m K K
nm
n
n
m
P
t
n
for
t
t
otherwise
(1)where
m
is the Legendre polynomial of orderm
;n
refers to the section number,n
1, 2,..., 2
K1;K
is the scaling parameter and can assume any positive integer and[0,1]
t
.Legendre polynomial can be defined as in [8] as follows:
1
21
2
!
m
m
m m m
d
P x
x
m dx
(2)N
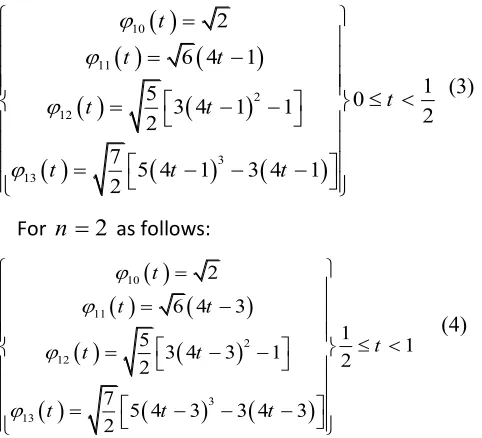
ow by using equation (2) and choosingM
3
and2
K
, then the four basis Legendre scaling function can be given forn
1
as follows:
10 11 2 12 3 13 26 4 1
1
5 0
3 4 1 1 2
2 7
5 4 1 3 4 1
2
t
t t
t
t t
t t t
(3)
For
n
2
as follows:
10 11 2 12 3 13 2 6 4 31
5 1
3 4 3 1 2
2 7
5 4 3 3 4 3 2
t
t t
t
t t
t t t
(4)
Figures (1) and Figure (2) illustrate these basis.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 -4 -3 -2 -1 0 1 2 3 4 Time
Legendre Scaling Function For M=3 , K=2
P H I1 0 , P H I1 1
Figure (1): Legendre Scaling Functions Basis forn1
III. PARAMETERIZATION VIA LEGENDRE SCALING
FUNCTION
Researchers have been trying to use parameterization methods solve optimal control problems. Parameterization methods are classified into three types: state, control, and state-control parameterization which will be used in this paper.
0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1 -4 -3 -2 -1 0 1 2 3 4 Time
Legendre Scaling Function For M=3 , K=2
P H I2 2 , P H I2 3
Figure (2): Legendre Scaling Functions Basis for n2 State and control variables can be approximated by Legendre scaling function as follows
2 1
1 0
1, 2, ,
K M
i
i nm nm
n m
x t
a
t i
s
[image:2.612.50.291.439.658.2] [image:2.612.338.540.448.615.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 6, June 2012)9
2 1
1 0
1, 2, ,
K M
i
i nm nm
n m
u t
b
t i
r
(6)
where
1 1nm 10 1 2K 0 2K
T
M M
t
1 1
10 1 2K 0 2K
i i i i i
nm M M
a
a
a a
a
1 1
10 1 2K 0 2K
i i i i i
nm M M
b b b b b
IV. NONLINEAR OPTIMAL CONTROL PROBLEM & ITERATIVE TECHNIQUE
The optimal control problem can be considered as finding the optimal controller
u t
that minimizes the performance index
0
f t
T T
J
x Qx u Ru dt
(7)
subject to nonlinear constraints and initial condition
,
,
x
f x t u t t
,
0
oA x x t
B x u t x
x
(8)
where
t
[0, ]
t
f,
x x
,
o
R
n,
u
R
m,
A B
,
aren n
andn m
constant matrices respectively.Q
is ann n
positive semidefinite matrix andR
is anm m
positive definite matrix andf
is assumed to be continuous differential function with respect to all its arguments.A modern technique for handling nonlinear dynamical systems is introduced in which the original nonlinear OCPS are replaced by a sequence of linear time varying OCPS under Lipschitz condition [9]. Mathematically if A x
is locally Lipschitz, then the nonlinear equation (8) can be replaced by the following linear time varying system. 0
0
0 0
0 0
,
0
0A x x
B x u
x
x
x
(9)
and for
k
1
k
k 1
k
k 1
kA x
t x
t
x
B x
u
0
0
kx
x
(10)
Moreover, equations (9) and (10) can be solved by the proposed method in [10]
Theorem
Suppose that the nonlinear equation (8) has a unique solution on the interval [0, ]t denoted by x t
and assume thatA x
:
R
n
R
n is locally Lipschitz. Then the sequence of functions defined in (9)-(10) converge uniformly on[0, ]
t
to the solutionx t
.Iteration technique which developed by Banks and Tomas [11-12] have some advantages that makes it an attractive tool for solving any nonlinear equation, that satisfies the local Lipschitz condition. (1) Iteration technique provides an accurate representation of the nonlinear system after small number of iterations. (2) Common linear techniques can be applied on nonlinear systems by using iteration technique.
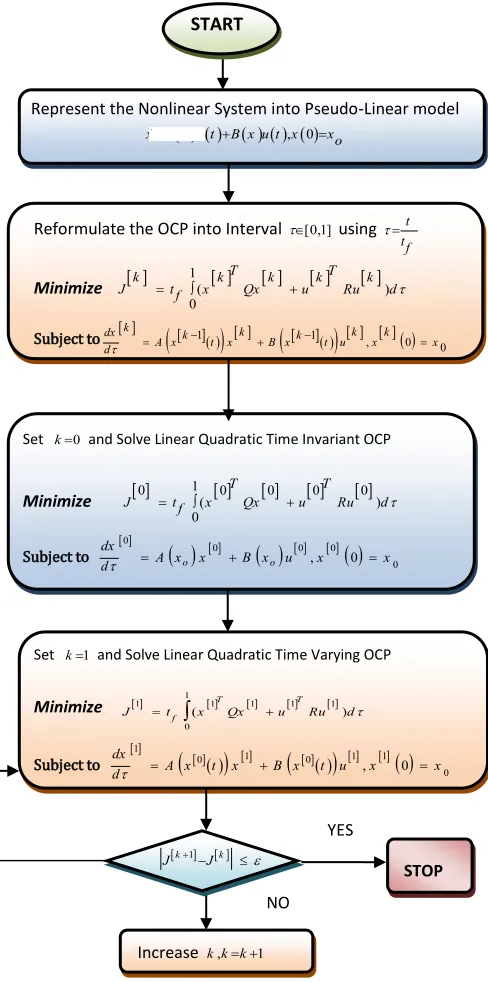
V. PROPOSED ALGORITHM
The proposed method is illustrated in Figure (3). It starts with representing the nonlinear problem into pseudo-linear model. Next, the problem is reformulated into intervals of [0,1]. Then, the iterative techniques to solve the linear quadratic time invariant OCP. Finally a stopping criteria is used to end the parameterization process
.
Numerical example
Find the optimal control
u t
for Van der Pol problem that
5
1
2
2
2
1
2
2 0
J
x
x
u
dt
subject to nonlinear equality constraints and initial conditions as follows
1
x x
2,
10
1
x
2
2
x
1x
2x x
1 2u x
,
20
0
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 6, June 2012)10
Figure (3): Flow Chart for Solving Nonlinear OCP Using Iteration Technique
To solve this nonlinear OCP using the proposed algorithm, we use the described procedures in flow chart of Figure (3). We solved this problem at
k
0
for K 2 and M 4, the optimal value we get is0.9537225048
J
. The optimal state and control trajectories fork
0
are shown in Figures (4) and (5) respectively.Figure (4): Optimal State Trajectories at k0
Figure (5): Optimal Control Trajectory at k0
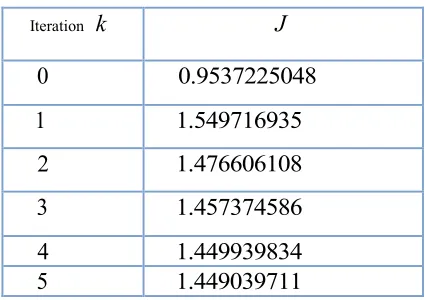
Then we solved the same problem in five iteration and the approximated optimal values are summarized in TABLE I.
NO
Represent the Nonlinear System into Pseudo-Linear model
, 0
x A x x t B x u t x xo
Reformulate the OCP into Interval [0,1] using t
tf
Minimize 1( )
0
T T
k k k k k
J tf x Qx u Ru d
Subject to
1
1
, 00
k k k k
dx A xk t x B xk t u x x
d
Set k0 and Solve Linear Quadratic Time Invariant OCP
Minimize 0 1( 0 0 0 0 ) 0
T T
J tf x Qx u Ru d
Subject to
0
0 0 0
0
, 0
o o
dx
A x x B x u x x
d
Set k1 and Solve Linear Quadratic Time Varying OCP
Minimize 1 1 1 1 1 1 0
( )
T T
f
J t x Qx u Ru d
Subject to
11 1 1
0 0
0
, 0
dx
A x t x B x t u x x
d
STOP
Increase k k k, 1
YES
START
[image:4.612.37.281.163.654.2] [image:4.612.327.554.265.428.2] [image:4.612.343.539.460.667.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 6, June 2012) [image:5.612.72.285.168.318.2]11
TABLE I
OPTIMAL VALUES FOR VAN DER POL PROBLEM
In order to show applicability and effectiveness of our proposed algorithm, we compare our results with other researchers as shown in TABLE II. This research outperformed the other four who used the same
K
&M
with five or more iterations.TABLE II
COMPARISON BETWEEN USED METHODS FOR VAN DER POL PROBLEM
Source
J
Jaddu [1]
1.433487
Bullock and Franklin [13]
1.433508
Bashein and Enns [14]
1.438097
Majdalawi [15]
1.449395
This Research
1.449039
VI. CONCLUSION
This paper is concerned with solving nonlinear optimal control problems using parameterization methods. It presented a novel approach using Legendre scaling function as new and efficient technique for solving nonlinear optimal control problem. The original problem was converted into a sequence of time-varying OCP using iteration technique and Legendre scaling function. A numerical example was shown to prove the validity of this technique. This approached shown better results than similar techniques.
References
[1] H. Jaddu, 1998, “Numerical Methods for Solving Optimal Control Problems Using Chebyshev Polynomials”, Ph.D. Thesis, JAIST, Japan.
[2] M. Razzaghi and G. Elnagar, 1994, “Linear Quadratic Optimal Control Problems via Shifted Legendre State Parameterization”, Int. J. Systems Science, Vol. 25, pp. 393-399.
[3] C.Y. Yang and C. K. Chen, 1994, “Analysis and Optimal Control of Time Varying Systems via Fourier Series”, Int. J. Systems Science, Vol. 25, pp. 1663-16784.
[4] C. F. Chen and C. H. Hsiao, 1975, “Design of Piecewise Constant Gains for Optimal Control via Walsh Functions”, IEEE Trans. Automatic Control, Vol. 20, pp. 596-603.
[5] M. Razzaghi and S. Yousefi, 2002, “Legendre Wavelets Method for Constrained Optimal Control Problems”, Math Meth. Appl. Sci., Vol. 25, pp. 529-539.
[6] M. Dadkhah, M. T. Kajani and S. Mahdavi, 2010, “Numerical Solution of Nonlinear Fredholm-Volterra Integro-Differetial Equation Using Legendre Wavelets”, Proceedings of the 6th IMT-GT Conference on Mathematics, Statistics and its Applications, Malaysia.
[7] H. Jaddu and M. Vlach 2006, , “Wavelet-Based Approach to Optimizing Linear Systems”, Japan Advanced Institute of Science and Technology, Ishikawa 923-1292, Japan.
[8] P. N. Paraskevopoulos, 1985, “Legendre Series Approach to Identification and Analysis of Linear Systems”, IEEE Trans. Automat. Cont., Vol. AC-30, No. 6, pp. 585-589.
[9] H. K. Khalil, 2002, Nonlinear Systems, 3rd ed, Prentice Hall, chapter 3, pp. 87-95.
[10] H. Jaddu, 2006, “Optimal Control of Time-Varying Linear Systems Using Wavelets”, Japan Advanced Institute of Science and Technology, Ishikawa 923-1292, Japan.
[11] M. Tomas-Rodriguez, S.P. Banks, 2006, “An Iterative approach to Eignvalue Assignment for Nonlinear Systems”, Proceedings of the 45th IEEE Conference on Decision & Control, pp. 1-6.
[12] M. Tomas-Rodriguez, S. P. Banks and M.U. Salamci, 2006, “Sliding Mode Control for Nonlinear Systems: An Iterative Approach”, Proceedings of the 45th IEEE Conference on Decision & Control. [13] T. Bullock and G. Franklin, 1967, “A Second Order Feedback
Method for Optimal Control Computations”, IEEE Trans. Automat. Cont., Vol. 12, pp. 666-673.
[14] G. Bashein and M. Enns, 1972, “Computation of Optimal Control by A Method Combining Quasi-linearization and Quadratic Programming”, Int. J. Control, Vol. 16, pp. 177-187.
[15] A. Majdalawi, 2010, “An Iterative Technique for Solving Nonlinear Quadratic Optimal Control Problem Using Orthogonal Functions”, M.S. Thesis, Al-Quds University, Palestine.
Iteration