International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 7, July 2012)262
Management of Car Parking System Using Wireless Sensor
Network
Satish V.Reve
1, Sonal Choudhri
21, 2, 3 All Saints College of Technology, Bhopal, M.P., INDIA.
Abstract: To cope with the ever growing problem of traffic management and parking management this paper proposes an advance solution for managing and monitoring free parking space and automated guidance for user to park the car. It aims at implementing smarter and better parking guidance mechanism which reduces significantly vehicle travel time and parking time. In this system all the Infrared sensor nodes (IR sensor) sense the status of the car space and accordingly transfer the information to the AVR controller. Accordingly AVR sensor sense the status of car parking space and displays the information on the LED screen for the user, thereby reducing the time for the driver to find vacant empty space and almost reduce the chances of entering into the unusual space which might lead into the traffic jam.
Keywords - AVR controller, Central processor Infrared Sensor (IR sensor),Display unit(DU) ,Wireless Sensor Networks (WSN),
I. INTRODUCTION
Recent advancement in the automobile industry has opted many people to use their own vehicle for travelling. This has increased effect on car ownership. But to park all these cars in the major metro cities is quite tedious and difficult. Parking problems are becoming ubiquitous and ever growing at an alarming rate in every major city. Lot of research and development is being done all over the world to implement better and smarter parking management mechanisms. Widespread use of wireless technologies paired with the recent advances in wireless applications for parking, manifests that digital data dissemination could be the key to solve emerging parking problems. Wireless Sensor Network (WSN) technologies has attracted & increased attention and are rapidly emerging due to their enormous application potential in diverse fields. This buoyant field is expected to provide an efficient and cost-effective solution to the efficient car parking problems have taken a lot of the guesswork out of driving: They can help us pinpoint the nearest gas station, navigate to an obscure destination, and avoid heavy traffic and construction. Nabbing a parking spot on a crowded downtown street, on the other hand, has remained a matter of luck and the occasional fearless maneuver.But now, new intelligent parking systems are poised to make that easy.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 7, July 2012)263
It yields an accurate vehicle count. The major drawbacks, however, include difficulties in installation and maintenance processes that involve road surface excavation. This installation and maintenance can prevent normal operation within under-operation parking garages. Other detectors include video cameras, ultrasonic sensors, and Doppler radars. To avoid installation and maintenance difficulties, we proposed an wireless sensor network (WSN) to monitor Parking of vehicular traffic.The organization of this paper is as follows. In section II we focuses on the related work topics. In section III the Architecture of MCPS/WSN system based on wireless sensor network is introduced. In section IV the design of AVR controller is introduced along with the experimental results and interfacing of hardware structure with the software installation. The performance of the system will be presented in section V and the following is the conclusion in section VI.
II. RELATED WORK
Vipin Kumar verma,[6], proposes distributed traffic monitoring and controlling model using sensors and dedicated traffic servers. This model is described as basic role-oriented processes communicating though primitive interaction protocols. The model is aimed to provide an enabling communications framework upon which multi-agent system models can be organized and built to be used for an simulation of an road map and to estimate the traffic behavior (to provide information about the best routes). The model assists the drivers to get the desired destination taking into account the current situation of traffic characteristics. It gives the estimated arrival time and the corresponding distance
between a start and an arrival point. The necessary information is obtained from current traffic position using sensors (used as dynamic information and to characterize the traffic, for example if traffic is jammed on an area, we can predict alter paths). The
information given by the advisory system has the form of self generated message according to the condition of traffic using the given algorithm.
Seong-e-yo,[5], proposed DGS, a Driving Guidance System based on wireless sensor networks(WSN) which guides a driver to drive a car in safety. The system consists of two sub-systems: SMS(Speed Measurement Sub-system) and WPS(Weather information Providing Sub-system). SMS measures the speed of a car and captures the image of the speeding car using a speed camera. WPS provides weather information including the road conditions (icy, wet, etc.) via VMS or a telemetric terminal.
Iris-net, [12], Proposed a scheme using video cameras, microphones and motion detectors. These sensing devices were used to detect the availability of parking spaces. It acquires real time parking information through their web applications. However, it generate large amount of data resulting in high power scavenging and communication bandwidth. The main limitation of the system is high power consumption and may suffer from technical aspects. .S.V.Srikanth, [4], Proposed a Smart Parking (SPARK) Management System which provides advanced features like remote parking monitoring, automated guidance & parking reservation mechanism. Though prototype system, they proposed the architecture which satisfies the car parking management system requirement.
Mingkai Chen, [1], introduces a parking guidance and information system based on wireless sensor system. This system consists of parking space monitoring nodes, routing nodes, sink node, parking guidance display and an information and management center. The nodes transmit the information through wireless sensor network by tree-like topological structure with non-standard protocol we developed. After analyzing and processing the data, the information and management center would distribute the parking information by LED screen and displays for the drivers. And the results of the experiment show that the performance of the system can satisfy the requirements of parking guidance.
Europe, the United Kingdom and Japan were among the first countries to implement smart parking systems. Today we can find several smart parking facilities in most major cities. Smart parking technology benefits the customer and the parking operator in the following ways:
• The customer can readily determine space availability prior to entering the garage and/or parking level.
• The customer can plan for their transit to public transportation with such smart parking systems employed at Park and Rides
• The parking operator can use the system data to develop or improve pricing strategies.
• The parking operator can use this system data to predict future parking patterns and trends.
• The parking operator can use this system data to prevent vehicle thefts.
• The parking operator can reduce the staffing requirements for traffic control within the facility.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 7, July 2012)264
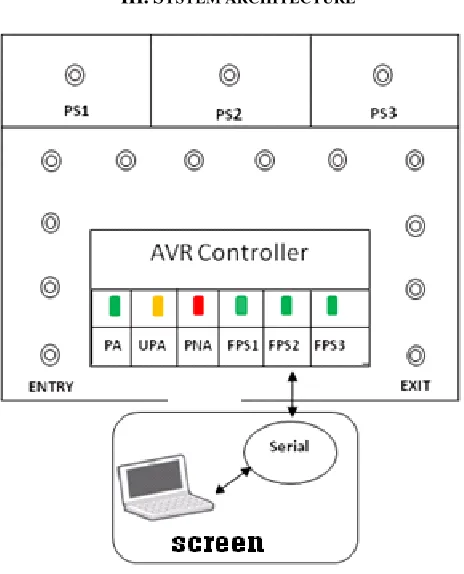
III. SYSTEM ARCHITECTUREFig 1. System architecture
Figure shows the schematic of MCPS system consisting of IR sensor, AVR controller, LED screen and interfacing screen.
Entry Buttons: These buttons are mounted at the entrance of parking space. These buttons reflects the status of parking lots.
AVR controller :The heart of our system is AVR controller which collects, monitor and displays the information collected from the IR sensor. This unit manages all the information necessary for the car driver. The Controller displays the information in the form of
LED Screen mounted at the entrance..Controller can be termed
as a single on chip computer which includes number of peripherals like RAM, EEPROM, Timers etc., required to perform some predefined task.
IR Sensor : An infrared sensor is an electronic device that emits and/or detects infrared radiation in order to sense some aspect of its surroundings. Infrared sensors can measure the heat of an object, as well as detect motion. Many of these types of sensors only measure infrared radiation, rather than emitting it, and thus are known as passive infrared (PIR) sensors.
IV. DESIGN OF THE NETWORK
IV.A INFRARED SENSOR
An infrared sensor is an electronic device that emits and/or detects infrared radiation in order to sense some aspect of its surroundings. Infrared sensors can measure the heat of an object, as well as detect motion. Many of these types of sensors only measure infrared radiation, rather than emitting it, and thus are known as passive infrared (PIR) sensors.
All objects emit some form of thermal radiation, usually in the infrared spectrum. This radiation is invisible to our eyes, but can be detected by an infrared sensor that accepts and interprets it. In a typical infrared sensor like a motion detector, radiation enters the front and reaches the sensor itself at the center of the device. This part may be composed of more than one individual sensor, each of them being made from pyroelectric materials, whether natural or artificial. These are materials that generate an electrical voltage when heated or cooled. These pyroelectric materials are integrated into a small circuit board. They are wired in such a way so that when the sensor detects an increase in the heat of a small part of its field of view, it will trigger the motion detector's alarm. It is very common for an infrared sensor to be integrated into motion detectors like those used as part of a residential or commercial security system. An infrared sensor can be thought of as a camera that briefly remembers how an area's infrared radiation appears. A sudden change in one area of the field of view, especially one that moves, will change the way electricity goes from the pyroelectric materials through the rest of the circuit. This will trigger the motion detector to activate an alarm. If the whole field of view changes temperature, this will not trigger the device. This makes it so that sudden flashes of light and natural changes in temperature do not activate the sensor and cause false alarms.
[image:3.612.49.281.154.441.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 7, July 2012)265
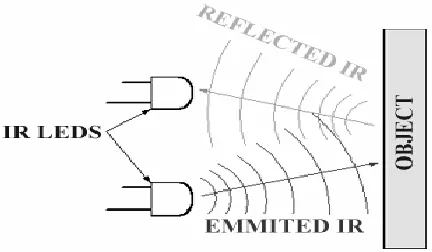
This sensor can be used for most indoor applications where no important ambient light is present. For simplicity. This sensor doesn't provide ambient light immunity. However, this sensor can be used to measure the speed of object moving at a very high speed, like in industry or in tachometers. In such applications, ambient light ignoring sensor, which rely on sending 40 KHz pulsed signals cannot be used because there are time gaps between the pulses where the sensor is 'blind'.OBJECT DETECTION USING IR SENSOR
Fig 3.Object Detection using IR sensor
It is the same principle in All Infra-Red proximity sensors. The basic idea is to send infra red light through IR-LEDs, which is then reflected by any object in front of the sensor.
ELECTRONICCIRCUITOFIRSENSOR
Fig 4.Circuit of IR Sensor
As the name implies, the sensor is always ON, meaning that the IR led is constantly emitting light. this design of the circuit is suitable for counting objects, or counting revolutions of a rotating object, that may be of the order of 15,000 rpm or much more. However this design is more power consuming and is not optimized for high ranges. in this design, range can be from 1 to 10 cm, depending on the ambient light conditions.
The sender is composed of an IR LED (D2) in series with a 470 Ohm resistor, yielding a forward current of 7.5 MA The receiver part is more complicated, the 2 resistors R5 and R6 form a voltage divider which provides 2.5V at the anode of the IR LED (here, this led will be used as a sensor). When IR light falls on the LED (D1), the voltage drop increases, the cathode's voltage of D1 may go as low as 1.4V or more, depending on the light intensity. This voltage drop can be detected using an Op-Amp (operational Amplifier.
IVB.AVRCONTROLLER
Fig 5. AVR Controller
●UPA (UnParking Allowed): - Whenever unparking is possible, this LED glows. It means that any vehicle can be unparked if no new vehicle is parking or entering into the parking area. If vehicle is entering into the Parking area then the signal is send by IR Sensor to the AVR Controller. AVR Controller sends information to the IR Sensors located at the parking slots so that no vehicle can be unparked during the parking of other vehicle and hence collision is avoided between two vehicles.
[image:4.612.50.266.285.411.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 7, July 2012)266
●FPS1(Free Parking Slot 1): - If Parking lot No. 1 is free, then this LED glows to show that Parking lot No. 1 is free and Parking can be possible at lot No. 1.●FPS2 (Free Parking Slot 2): - If Parking lot No. 2 is free, then this LED glows to show that Parking lot No. 2 is free and Parking can be possible at lot No. 2.
●FPS3 (Free Parking Slot 3): - If Parking lot No. 3 is free, then this LED glows to show that Parking lot No. 3 is free and Parking can be possible at lot No. 3.
Whenever any vehicle arrives at the entrance of the Parking lot central processor receives the signal from the IR Sensor nodes and shows the status of Parking at the . Also it communicates with the IR Sensors located at the Parking lots so that no vehicle can be unpark during the arrival of the new vehicle at the Parking area and collision of two vehicles can be avoided. The Microcontroller we selected is ATmega32 as shown in figure 4. It is 8 bit MCU
working with low power supply voltage range 2.7V to 5.5V. It
consists of advanced RISC architecture with 32 KB
self-programming flash program memory, 2KB SRAM, 1KB EEPROM, 32 bit programmable I/O lines, with 16MHz max. operating frequency. The power consumption at 1MHz, is 3V. Active mode: 1.1mA, Idle mode: 0.35mA, and Power down mode: <1µA
V. SYSTEM MODEL
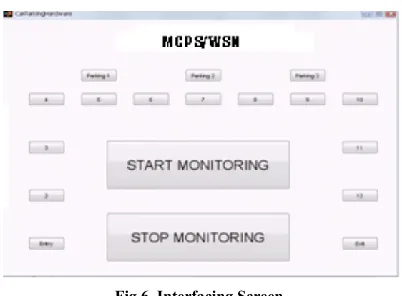
VA.CENTRAL PROCESSING SCREEN
Fig 6. Interfacing Screen
The GUI as shown in figure 5 will be used by the System Administrator to control and manage the Smart Parking Assist System. A MATLAB 7.10 code is acts as a central co-ordinator and coordinates the whole parking System model. The Administrator can easily manage and control over the whole Parking System and also monitor the Parking Status of the system.
This system model provide the parking guidance mechanism in order to reduce the time of the driver for searching the parking space and also headache to drive the car inside the parking area and search the nearest parking lot.
[image:5.612.67.268.473.621.2]
Fig.7. System Model
The initial Smart Parking Assist System (SPAS) model includes 16 sensor nodes, 4 guiding nodes, 3 parking lots, Parking Status Display unit and MCU (AVR Controller) as shown in figure 6. Initially, when the system starts functioning, all the sensor nodes form a network. These sensor nodes check the status of parking spaces and send the report to the MCU (AVR Controller). MCU transmits the status information to Parking Status Display Unit (PSDU). Simultaneously, the same report should also send by MCU to the central co-ordinator by the serial interface.
When a vehicle parks in a parking lot, the sensor node detects that the parking space is occupied and it sends a report message to the MCU. MCU turn off the respective LED to indicate that the respective lot is not free. It only glows those LEDs whose respective parking lots are free. Side by side it also shows the nearest parking lot for incoming vehicle by continuously glowing the LED of that respective lot.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 7, July 2012)267
Fig.8 parking slots are full
VI.COMPARISON WITH OTHER SYSTEMS
TABLE I. COMPARISON OF DIFFERENT PARKING SYSTEM
Parking Methods
Possibility to detect different
types of object
Type of sensor used
Use of central Server
Vehicle counting System[8]
Yes Optical Sensors Yes
Car parking management
System[9] Yes
Light Sensors, Acoustic Sensors
& Magnetic Sensors
Yes
VDS[11] No
Magnetic Sensor
No
PGI[10] Yes
Loop Detectors
No
PGS[5] Yes
T-Sensor, T-sink, T- BS
Yes
PGIS[1] Yes
Ultrasonic Sensors
Yes
MCPS/WSN Yes IR Sensors No
VII. CONCLUSION
This paper introduces a MCPS/WSN based on IR sensor nodes which . The customer can readily determine space availability prior to entering the garage and/or parking level.
• The customer can plan for their transit to public transportation with such smart parking systems employed at Park and Rides
• The parking operator can use this system data to predict future parking patterns and trends.
• The parking operator can use this system data to prevent vehicle thefts.
• The parking operator can reduce the staffing requirements for traffic control within the facility.
• The system significantly reduces traffic–and the resulting vehicle emissions– by decreasing the time required for customers to locate open spaces.
VIII. REFERENCES
[1]. Mingkai Chen, Tainhai Chang, “A Parking guidance & Information system based on Wireless Sensor Networks”, IEEE International Conference on information & Automation Shenzhen, China, June 2011.
[2]. Mingkai Chen, Chao Hu and Tianhai Chang. “The Research on
Optimal Parking Space Choice Model in Parking Lots”. 2011 3rd
International Conference on Computer Research and Development, March 11 - 13, 2011,Shanghai, China,Vol. 2, pp:93-97.
[3]. Abhijit Sharma, Rituparna Chaki, Uma Bhattacharya, “Applications of Wireless Sensor Network in intelligent traffic system: A Review”, 978-1-4244-8679-3/11,IEEE 2011.
[4]. S. V. Srikanth, Pramod P. J., Dileep K. P., Tapas S., Mahesh U. Patil, Sarat Chandra Babu N, “Design & Implementation of a Prototype Smart Parking(SPARK) System using Wireless Sensor Networks” International Conference on Advanced Information Networking & Applications workshops, 978-0-7695-3639-2/09, 2009 IEEE. [5]. Seong-eun Yoo, Poh Kit Chong, Taehong Kim, Jonggu Kang,
Daeyoung Kim, Cahngsyb Shin, Kyungbok Sung, Byungtae Jang,“PGS: Parking Guidance System based on Wireless Sensor Networks”, 978-1-42441653-0/08, 2008 IEEE.
[6]. Vipin Kumar Verma, Rahul Chaudhari, Siddharth Kumar Singh, Tapas Mishra, Pankaj Srivastava , “Intelligent Transport Management System using Wireless Sensor Networks”, IEEE Intelligent Vehicle Symposium Elndhoven University of technology Elndhoven, Netherlands, June 4-6, 2008.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 7, July 2012)268
[8].Jatuporn Chinrungrueng, Udomporn Sunantachaikul, Satien
Triamlumlerd, “ Smart Parking: An Application of Wireless Sensor Network”, International Symposium on Applications and Internet Workshops(SAINTW07), 978-0-7695-2757-4/07, 2007 IEEE. [9]. Rakesh Kumar, Naveen K Chilamkurti, Ben Soh, “A Comparative
Study of Different Sensors for Smart Car Park Management”, International Conference on Intelligent Pervasive Computing, 2007”, 978-0-7695-3006-0/07, 2007 IEEE.
[10]. S. Shaheen, C. Rodier, and A. Eaken, “Smart parking management field test: A bay area rapid transit (bart) district parking demonstration”, Jan 2005. Final Report.
[11]. Yaser E. Hawas and Marc Joseph B. Napenas, “Infrastructureless Inter-Vehicular Real-Time Route Guidance”, Proc. 11th International IEEE Conference on Intelligent Transportation Systems, 12-15 Oct 2008, pp. 1213-1219.
[12]. IrisNet: Internet -scale Resource-Intensive Sensor Network Service, http://www.intel-iris.net
[13]. Seong-eun Yoo, Poh Kit Chong, Taisoo Park, Youngsoo Kim, Daeyoung Kim, Cahngsyb Shin, Kyungbok Sung, Hyunhak Kim,“DGS: Driving Guidance System based on Wireless Sensor Networks”, 978-0-7695-3096-3/08, 2008 IEEE.
[14]. Xu Li, Wei Shu, Minglu Li, Hongyu Huang and Min-You Wu, “DTN Routing in Vehicular Sensor Networks”, Proc. Global Telecommunications Conference, GLOBECOM" 2008, pp. 752-756. [15]. Vanessa W.S. Tang, Yuan Zheng, Jiannong Cao,” An Intelligent Car
Park Management System based on Wireless Sensor Networks”, 1st International Symposium on Pervasive Computing and