Munich Personal RePEc Archive
Delegation to potentially uninformed
agent
Semenov, Aggey
University of Ottawa (Department of Economics)
19 October 2012
Online at
https://mpra.ub.uni-muenchen.de/42080/
Delegation to potentially uninformed agent
Aggey Semenov
October 2012
Abstract
We consider a delegation problem with a potentially uninformed agent when the principal cannot use monetary payments. If the bias between the principal and the agent is large, then the optimal delegation set is an interval. When the bias is small or medium however, the optimal delegation set is no longer connected. It can be one of two types: with an interval and low option, the other with two intervals. In all cases the agent has less discretion. However, in the case of medium biases the principal delegates in a wider range than in the case of informed agent. In all cases the agent will be given more freedom if he is more informed.
Introduction
Consider a situation in which a principal delegates decisions to an agent but limits the agent’s discretion. The rationale for delegation is that the agent is better informed than the principal, though in reality the agent may not be competent. For example, in the decision making process within a …rm, a CEO delegates investment decisions within certain limits to a manager who may or may not have the appropriate information. Such a situation is likely to occur with a junior manager, when it is prohibitively costly to collect information, or when the agent observes the realization of the pilot project to acquire information. The principal does not know the outcome of the pilot. When designing the delegation limits, the principal takes into account that the agent may be uninformed.
This paper studies a delegation problem when the agent with some positive probability does not have private information and the principal cannot use monetary payments. Instead the principal selects a set of actions from which the agent is required to choose - a delegation set. The principal faces a trade-o¤ between her desire to use the agent’s information and exerting control over decisions. We show that if the bias between the principal and the agent is su¢ciently large, the optimal delegation set is an interval. When the bias is small or medium, the optimal delegation set is no longer connected. For small biases it consists of two intervals. For medium biases it consists of an interval and low option. The principal wants to exert more control over the uninformed agent compared to the informed agent. Therefore, in all cases there are fewer choices available for the agent. However, in the case of medium biases the range of the delegation set is larger than in the
case of the informed agent. The principal distorts the delegation set downwards in order to bene…t, at least partially, from the information in the low-end of the distribution. In all cases the more informed the agent, the more freedom given.
The constrained delegation framework has recently become popular to analyze the variety of economic situations: the limits placed on Central Bank’s monetary or exchange rate policy, price limits in regulation, the House regulations on policies that a delegated committee may choose, tari¤ levels etc. This literature was pioneered by Holmström (1977) and (1984) who proves under general conditions that there exist an optimal delegation set. Holmström (1984) and Armstrong (1994) assume that the optimal delegation set is an interval. Following this tradition most of the literature focused on interval delegation with informed agent. Melumad and Shibano (1991), Martimort and Semenov (2006), Alonso and Matouschek (2008), Kovac and Mylovanov (2009) and Amador and Bagwell (2011) present di¤erent su¢cient conditions under which the optimal delegation set is an interval. Frankel (2012) shows that in the case of multiple decisions, half-space analog of an interval delegation set is optimal in the case of a normal distribution of types and quadratic payo¤s. Non-interval delegation was considered in Melumad and Shibano (1991) who presented condition on payo¤ functions of the principal and the agent in order to have non-interval optimal delegation set. The ideal decisions of the principal should be higher than the ideal decisions for the agent for some states and lower for others. Martimort and Semenov (2006) and Kovac and Mylovanov (2009) pointed out conditions on distributions of types when the optimal delegation set can be non-interval. This paper shows that with conventional payo¤s and distributions, non-connectedness of the optimal delegation set may arise if the agent may be uninformed.
In the literature on signaling games Austen-Smith (1994) established that the possibility of an uninformed sender makes information transmission possible for a wider range of con‡icts between the receiver and the sender compare to the cases when the sender is informed. The reason for this arising is di¤erent from ours; the low - type sender pools with the uninformed sender. This leads to a more favorable action for the low-type sender which makes it is easier for high - type sender to separate himself than in the case when the receiver is sure that the sender is informed. Lewis and Sappington (1993) consider the optimal contract with the possibility of ignorance when the principal may use transfers to elicit information. The payo¤ of the principal does not depend on the information parameter (private values). In this framework there is always a discontinuity in the optimal output. The optimal contract exhibits pooling and when costs are high the output is lower than in the standard second best.
The Model
A principal (she) delegates the making of a decision d 2 R to an agent (he). The payo¤s of the principal and the agent are VP (d; ) and VA(d; ) correspondingly, where the state of the world
2 = ; is drawn from the distribution with non-atomic, continuous density function f( )
and cumulative density function F( ): The principal does not observe . The game is as follows:
1. The principal chooses a compact delegation set D R.
3. The agent chooses d2D:
A delegation setDis optimal if it maximizes the principal’s expected payo¤ among all compact sets. Denote by d0 2D the choice of the non-informed agent and byDinf the set of choices for the
informed agent,D=fDinf; d0g. If the agent learns that the state is then his payo¤ isVA(d( ); ); where
d( ) = arg max
d2DinfVA(d; )
and the expected payo¤ of the uninformed agent is R VA(d0; )dF( ): The principal’s expected payo¤ is denoted by V(D) :
V(D) =p
Z
VP (d0; )dF( ) + (1 p)
Z
VP(d( ); )dF( ):
We denote the …rst (uninformed) part of the principal’s payo¤ as V0(D) and the second
(in-formed) part as Vinf(D) so that V(D) = V0(D) +Vinf(D): The choices of the agent maximize his
payo¤ in the delegation set. If the agent is informed that the state is 2 then
VA(d( ); ) VA(d(
0
); ) for all ; 0
2 : (1)
When the agent does not observe the state, he prefers d0 to any other outcome d(
0
)2Dinf:
Z
VA(d0; )dF( )
Z
VA(d(
0
); )dF( ) for all ; 0
2 : (2)
Finally, if the agent observes the state ; he prefers d( ) tod0 if
VA(d( ); ) VA(d0; ): (3)
We focus on quadratic speci…cations of payo¤s,
VA(d; ) =
1
2(d )
2
and VP (d; ) =
1
2(d b)
2
;
where the parameterb 0is the bias between the principal and the agent. The bias b is a common knowledge. The delegation sets have the formD=n [n
i=1Di ; d0
o
;whereDi = di; di ; i= 1; :::; n are closed intervals, di di < di+1 di+1 for all i= 1; :::; n 1: The choice of the informed agent
is the following: if 2 Di = di; di then d( ) = and VA(d( ); ) = 0: If 2 di; di+di+1
2
then d( ) = di and VA(d( ); ) = 12 di
2
: If 2 di+di+1
2 ; di+1 then d( ) = di+1 and
VA(d( ); ) = 12 di+1
2
: The …xed decision E( ) + b maximizes the payo¤ of uninformed agent. The expected payo¤ of the principal is
V(D) = V0(D) +Vinf(D) =
p 2
Z
(d0 b)2dF( )
1 p 2
Z d
1
(d1 b)2dF( )+
+Xn
i=1 Z di
di
b2dF( ) +Xn
i=1
Z di+di+1 2
di
(di b)
2
+Xn
i=1 Z di
+1
di+di+1 2
di+1 b
2
dF( ) +
Z dn
dn b
2
dF( )
)
:
The distribution of states satisfy the following
Assumption 1 The function F( ) is log-concave and for all 2 the function f( ) bf0
( ) is
positive for all 2 and weakly decreasing in .
Martimort and Semenov (2006) show that if the agent is always informed,F( )is log-concave and
f( ) bf0
( ) 0for all then the optimal delegation set is an interval. Examples of distributions satisfying this Assumption are uniform distributions and exponential distributions.
Remark 1 The delegation problem has the equivalent mechanism design formulation. Denote by
e the expanded state space [ ff?gg; where f?g corresponds to the state when the agent is
unin-formed. For each state 2 e the principal chooses a decisionq( )2D; where q( ) is a measurable
function from e to R: The corresponding delegation set isD=fq( )g 2 0 =fq( ); q(f?g)g 2 :
Remark 2 We can consider more general utility for the agent: VA = vA(d ; ); where vA is
a single-peaked function given : With appropriate changes, the results also can be extended to
generalized quadratic payo¤ for the principal VP = r( )(d yP( ))2; where yP ( ) is the ideal
policy for the principal (see also Alonso and Matouschek, 2008).
Results
The delegation is valuable if the principal bene…ts from delegating decision - making to the agent instead of choosing the decision by herself. Our …rst result establishes the possible types of the optimal delegation sets when the delegation is valuable.
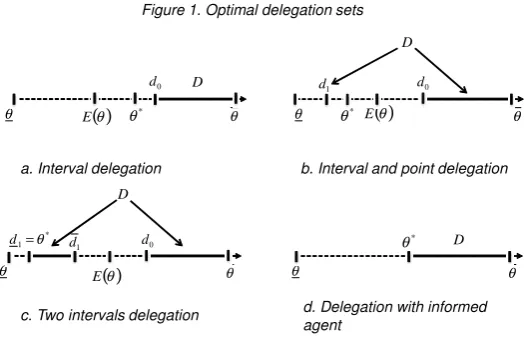
Proposition 1 Ifp < 1andb < E( ) then the delegation is valuable and the optimal delegation set is one of the following types:
1. Interval delegation: D= d0; ; where d0 E( ) +b;
2. Interval and point delegation: D =fd1g [ d0; ; where E( ) d0 < E( ) +b andd1+d0 =
2E( );
3. Two - intervals delegation: D = d1; d1 [ d0; ; where d1 E( ) d0 < E( ) +b and
d1+d0 = 2E( ):
The optimal delegation sets are presented on Figure 1 a-c. The interesting feature of delegation sets of type 2 and 3 is that they are not connected. In case 2 d1 and d0 are equidistant from E( ):
In case 3d1 andd0 are equidistant fromE( ):The principal want to limit the choice of uninformed
θ θ θ θ a. Interval delegation
Figure 1. Optimal delegation sets
( )θ
E 0
d D
D
θ
θ θ θ
1 d
*
θ
*
θ
( )θ
E
0 d
( )θ
E
1 d
0 d
*
θ
b. Interval and point delegation
c. Two intervals delegation d. Delegation with informed agent
D
D *
1=θ d
Proof: Delegation is valuable if the payo¤ of uninformed principal 1 2
R
(E( ) )2dF( ) is smaller than maxDV(D): Consider an interval delegation set De = E( ) +b; :Then V(D)e
1 2
R
(E( ) )2dF( ) = 12RE( )+b(E( ) b) (E( ) +b)dF( ) >0: Thus, delegation is valuable.
We will prove the Proposition 1 in few Lemmas. Denote by d( ) = lim 0! 0d(
0
) and by
d( +) = lim 0! +0d(
0
):
Lemma 3 d0 2 fd (E( )); d+(E( ))g:
Proof. We re-write (2) as
(d( 0
) d0) (d(
0
) +d0 2E( )) 0
and (3) as
(d( 0
) d0) (d(
0
) +d0 2
0
) 0:
Summing up these inequalities we obtain(d( 0
) d0) (
0
E( )) 0:Hence, for any" >0we have
d(E( ) +") d0 d(E( ) "): Taking the limit we obtaind0 2 fd (E( )); d+(E( ))g:
By this Lemma, if there exist k such that E( ) 2 Dk then d0 =d(E( )). If on the other hand for some i we haveE( )2 di; di+1 then d0 is eitherdi ordi+1.
We introduce " transformation D(") of the set D on the interval (Dk; Dk+1); where Dk =
dk; dk and Dk+1 = dk+1; dk+1 :Consider the sets Dk0 = dk; dk+" and D0k+1 = dk+1 "; dk+1
such that dk +" < dk+1 ": The derivative of Vi(D(")) with respect to " evaluated at " = 0 is greater than zero if
b(2F( 0
) F( 0
) F( 0
+ ))
Z 0 0
F( )d +
Z 0+ 0
The Assumption 1 provides a su¢cient condition for (4). Indeed, consider the function
(t) = b(2F( 0
) F( 0
t) F( 0
+t))
Z 0 0 t
F( )d +
Z 0+t
0
F( )d ;
wheret2[0; ]:We have (0) = 0 and 0
(t) =b(f( 0
t) +f( 0
+t)) F( 0
t) +F( 0
+t):Then
00
(0) = 0 and 00
(t)>0.
Lemma 4 The optimal delegation set has at most two disjoint intervals.
Proof. Assume …rst that there exist i such that d0 2 di; dk+1 : If for k < i there are disjoint setsDk = dk; dk andDk+1 = dk+1; dk+1 then we take" transformationD(")ofDin the interval
(Dk; Dk+1): Because d0 2= Dk[Dk+1 we haveV0(D) =V0(D(")) and, therefore, V(D("))> V(D), which contradicts the optimality of D: The case d0 = di+1 is similar. If d0 = d(E( )) then using
the same considerations we show that D is an interval.
In order to compare the delegations sets in Proposition 1 with the delegation set when the agent is always informed (p= 0) we remind the well-known result (see Martimort and Semenov, 2006).
Lemma 5 If p= 0 then the optimal delegation set is an intervalD = ; , where is implicitly de…ned by
=b+E( j ): (5)
Proof. By Lemma 4 the optimal delegation set is an interval, D = 1; . The principal’s
expected pro…t is
V(D) = Vinf(D) =
Z 1
( 1 b)2dF( )
Z
1
b2dF( ):
The …rst-order condition for 1 leads to (5).
The optimal delegation set with informed agent is depicted in Figure 1 d. Lemma 3 shows that
d0 2 fd (E( )); d+(E( ))g: We can now prove that d0 =d+(E( ):
Lemma 6 d0 =d+(E( ) :
Proof. a) Let D = fDinf; d0g is the optimal delegation set. We prove …rst that d0 :
Assume to the contrary that d0 < :Consider the optimal delegation set D de…ned in Lemma 5.
The set D0
= D [nbo is feasible for the program (P): Because of the optimality of D we have
V0(D) +Vinf(D) V0(D0) +Vinf(D0): By Lemma 5 we have Vinf(D0) Vinf(D): Therefore it must
be that V0(D0) V0(D): This leads to (d0 ) (d0+ 2E( ) 2b) 0. Suppose that d0 <
then we haved0 + 2E( ) + 2b or > b+E( ); which contradicts (5). Therefore, d0 :
b) We prove now that d0 = d+(E( ): Assume to the contrary that d0 = d (E( ) < d+(E( ):
Consider delegation sets D = fDinf; d (E( ))g and D+ = fDinf; d (E( ))g: Since Vinf(D+) =
Vinf(D ) we have
V(D ) V(D+) = V
0(D ) V0(D+) = d+(E( )) d (E( ))
d+(E( )) +d (E( ))
ThusV(D )> V(D+)if and only if d+(E( ))+d (E( ))
2 > E( ) +b:In this case, sinced0 =d (E( ))>
; we have for all 2 [d (E( )); d+(E( ))]; > : Then if we consider the delegation set De =
f[d (E( )); d+(E( ))][D
inf; E( )g we have Vi(D)e > Vi(D): New uninformed option E( ) > do thus,V0(D)e > V0(D): Contradiction. Hence, d0 =d+(E( )):
From Lemma 4 and Lemma 6 it follows that the optimal contract belongs to one of types 1-3 of Proposition 1. Note …rst that for types 2 and 3 d+(E( ))+2d (E( )) E( ):Indeed, if d+(E( ))+2d (E( )) > E( ) then d0 < E( ) and d0 : As in Lemma 6 b) we obtain a strict improvement. Thus,
d+(E( ))+d (E( ))
2 E( ):
Lemma 7 If p <1 then d0 < E( ) +b:
Proof. See Appendix.
Consider a set Dinf = [ 1;
0
][[ 0
+ ; 2]: We introduce transformation D of Dinf:
D = [ ; 0
+ ] [ 0
+ + ; : The derivative of Vinf(D ) with respect to evaluated at
= 0 is positive when
f( 0
+t) bf0
( 0
+t) f( 0
t) bf0
( 0
t) for all t2[0; ]:
This condition is satis…ed by Assumption 1.
We now can prove the Proposition 1. By Lemma 3 there are two possibilities; either the op-timal delegation set is an interval D = f[ 1; 2]; E( )g, or it has the form D = f[ 1;
0
][
[ 0
+ ; 2];
0
+ g: Note that 2 = : If 2 < ; then the delegation sets D=f 1; ; E( )g and
D=f[ 1;
0
][ 0
+ ; ; 0
+ g strictly dominate respective delegation sets. If the optimal delegation set is an interval then it is of the type 1. Assume thatD= ([ 1;
0
][
0
+ ; ; 0
+ )and d+(E( ))+2d (E( )) 6=E( ):Becaused0 < E( )+bby Lemma 7 there exist >0
such thatd0+ E( )+b:Then the transformation of[ 1;
0
][ 0
+ ; improves bothV0
and Vinf: Contradiction. Therefore in both cases 2 and 3 the intervals of delegation are equidistant
fromE( ):Note that when the intervals of delegation are equidistant fromE( )we cannot improve by introducing the transformation because d0 changes from d0 = d+(E( ) to d0 = d (E( )
which is further away fromE( ) +b and, therefore, the componentV0 sharply decreases.
The parameters of delegation sets in Proposition 1 satisfy the following inequalities:
Corollary 1 If p >0 for corresponding types in Proposition 1 we have
1. d0 > ;
2. d1 < d0;
3. d1 = :
Proof. See Appendix.
For the delegation set of the type 1 in Proposition 1 ifp >0we haveDis strictly contained inD :
decisions when the agent is uninformed. Thus, she moves the boundary of delegation closer to the optimal policy of the uninformed agent, E( ) +b: Thus, the principal gives less discretion to the agent. This is generally true for all types of the delegation sets. For the type 2, the delegation set consists of the set d0; and the option d1 :The principal wants to use information below d0;
but she cannot delegate to medium types because she wants to limit the choice of uninformed agent. Thus, she has to distort the delegation set even below the optimal boundary for the informed agent case : For the delegation set of the type 3, the principal makes use of information held by upper and lower tails of distribution still exerting control for medium range.
We consider now the comparative statics with respect to the bias. The main goal is to determine which type of the delegation set is optimal for di¤erent ranges of biases. Lets …x the biasb and con-sider the optimal delegation setDof typeiin Proposition 1. By this Proposition the optimal delega-tion set of typeiis uniquely determined by the outcomed0. De…neVi(d0; b)- the corresponding ex-pected payo¤ of the principal andd(0i)(b)as the maximizer ofVi(d0; b) :d(
i)
0 (b) = arg maxd0Vi(d0; b): De…ne also b1 as the solution of
2E( ) d(2)0 (b1) =b
and b2 is de…ned by
b2 = 1 F (E( ))
Z E( )
F ( )d : (6)
The bias b2 is such that the optimal delegation set for the informed agent is E( ); . We have the following:
Proposition 2 If p2(0;1) then there exist b1 and b2; b2 > b2 > b1 such that:
a) (Interval delegation) if b b2 then the optimal delegation set is of type 1;
b) (Interval and point delegation) if b 2[b1; b2) then the optimal delegation set is of type 2;
c) (Two - intervals delegation) if b2[0; b1) then the optimal delegation set is of type 3.
Proof (See Appendix)
When the bias b is large then the delegation set with uninformed agent is D = d0; D =
; and d0 > for p > 0: Of course, when the bias is su¢ciently large, then the optimal
delegation set is a pointfE( ) +bgregardless of the agent is informed or not. If the principal faces only uninformed agent she wants to implement E( ) +b: When there is a non-zero probability of the agent being informed, the principal restricts the optimal delegation set towards this optimal decision. For medium levels of bias, the same principle applies andd0 > :However, the principal
gives the low types the option d1 = 2E( ) d0:She cannot neglect these types as the case of large
biases because the low types are now more aligned with the principal. The principal faces additional trade-o¤ between delegating to informed types and controlling the uninformed agent. This moves the policyd0 towardsE( ) +b:Correspondingly, the optiond1 optimally is below :Ifd1 > then
the principal can do better by adding extra interval of delegation [ ; d1]: This exactly happens
Holmström (1984) and Alonso and Matouschek (2008) have shown that the agent will be given more freedom when he is more informed. For this purpose they use the normally distributed state of the world: N( ; 2) and consider the comparative statics of interval delegation when 2
decreases. Another way to test this hypothesis is to check if the optimal delegation sets are larger when the probability 1 p of the agent being informed increases.
Proposition 3 If D(pk); k = 1;2 are the optimal delegation set when the probability not being
uninformed are p1 < p2; then D(p1)%D(p2):
Indeed, then the agent is more informed, then informed component of principal’s payo¤ is relatively more important - it has relatively more weight. As Figure 1 shows in this case the optimal delegation set is closer to the setD = ; :
Uniform example: Consider uniformly distributed types U ni[0;1]: In this case the optimal delegation set with informed agent is D = 2b; and delegation is valuable when b < 1
2:
All three types of delegation sets are determined by correspondingd0:We have
d(1)0 =b
p 1 p + 2
r
b2+ p
(1 p)2;
d(2)0 =b
p 1 p +
2
s
b2+ p
(1 p)2 + 1
2 2b and
d(3)0 = 1 1
2
p
p(4b+p 4bp) 2 (1 p) :
Note that if b!0 then d(3)0 ! 1
2 =E( ):
Proofs
Proof of Lemma 7. If the optimal delegation setDhas type 2,D= f2 0
d0g [ d0; ; d0 we
must haveb 2 0
d0: Ifb<2
0
d0 then consider the setDe =
h b;2 0
d0
i
[ d0; ; d0 :This
set of type 3 improvesVinf leavingV0 unchanged.
Consider the …rst-order condition with respect to d0 for a set D = f2
0
d0g [ d0; ; d0 of
type 2. The derivative @V0
@d0 = (d0 E( ) b): In order to prove that d0 < E( ) +b we have to show that @Vinf
@d0 <0; where
Vinf =
1 p 2 2 6 4 0 Z (2 0
d0 b)2dF( ) +
d0 Z
0
(d0 b)2dF( ) +
Z
d0
b2dF( )
3 7 5: The derivative @Vinf @d0
= 1 p 2
2 42bF( 0
) bF(d0)
0
Z
F( )d +
d0 Z
0
F( )d
1 p 2
2 6 42bF( 0
) bF(d0)
2Z0 d0
F( )d
0
Z
2 0 d0
F( )d +
d0
Z
0
F( )d
3 7 5
Since b 2 0
d0 and the function F( ) is log-concave we have by (4)
@Vi @d0 1 p 2 2 6 42bF( 0
) bF(d0) bF(2
0
d0)
0
Z
2 0 d0
F( )d +
d0 Z
0
F( )d
3 7 5<0:
For a contract of type 3 we have immediately
@V3
@d0
= 1 p 2
2 6 42bF( 0
) bF(d0) bF(2
0
d0)
0
Z
2 0 d0
F( )d +
d0 Z
0
F( )d
3 7 5<0:
Proof of Corollary 1. 1. Ifd0 <bwe can consider the delegation setD:b Since we haveb< E( )+b;
the set Db( ) strictly improves V0 and Vinf: Note that q0 =b only ifp= 0:
2. If d1 > b; then we can consider the set De =
h b; d1
i
[ d0; ; d0 which has the same
uninformed decision d0 and strictly improves Vinf:
3. Taking the derivative with respect to d1 we obtaind1 =b:
Proof of Proposition 2. The payo¤ functions corresponding to each of types 1-3 are given by
V1(d0; b) =
p 2
Z
(d0 b)2dF ( )
1 p 2 2 6 4 d0 Z
(d0 b)2dF( ) +
Z
d0
b2dF( )
3 7 5:
V2(d0; b) =
p 2
Z
(d0 b)2dF ( )
1 p 2
2 4
E( ) Z
(2E( ) d0 b)2dF( )+
d0 Z
E( )
(d0 b)2dF( ) +
Z
d0
b2dF( )
3 7 5
V3(d0; b) =
p 2
Z
(d0 b)2dF ( )
1 p 2 2 6 4 b Z
(b b)2dF( )+
2E( ) d0
Z
b
b2dF( ) +
E( ) Z
2E( ) d0
(2E( ) d0 b)2dF( ) +
d0 Z
E( )
(d0 b)2dF( ) +
Z
d0
b2dF( )
Considerb > b2; then using the …rst-order condition @V1
@d0(d
(1)
0 (b); b) = 0 and (6) we have
@V2
@d0
(d(1)0 ) =F (E( ))
2 4
RE( )
F ( )d F (E( )) b
3 5<0:
For any …xed b; V2(d0; b) is a convex function of d0 and @V@d20(d
(2)
0 (b); b) = 0: Hence d (1)
0 (b) >
d(2)0 (b) for all b 2[b2; bmax]:
Consider Vinf(b) = Vinf(d(
i)
0 (b); b) as functions of b: Using the Envelope theorem the derivative
of V1(b)is
dV1(b)
db =b(1 p)(1 F(d
(1)
0 )) (7)
and
dV2(b)
db =b(1 p)
"
2 E( ) d(2)0 (b) F (E( )) bF(E( ))
Z E( )
F( )d
!!
(1 F(d(2)0 ))
#
:
By (6) we have dVdb1(b) > dV2(b)
db for all b 2[b2; bmax]: Note that V1(d(1)0 (b2); b2) =V2(d(1)0 (b2); b2):
For b b2 consider the delegation set of type 1 D(b) = hd(1)0 (b); i; d(1)0 (b) and of type 2
D0
(b) = 2E( ) d(1)0 (b) [hd(1)0 (b); i; d(1)0 (b) . We haveV0(D) = V0(D0): Hence
V2(D
0
(b); b) V1(D(b); b) =
1 p 2
E( ) Z h
(d(1)0 (b) b)2 (2E( ) d(1)0 (b) b)2if( )d =
2 (1 p)
E( )
Z
(d(1)0 (b) E( )) (E( ) b)f( )d = 2p(d(1)0 (b) E( ))
E( )
Z
(E( ) b)f( )d :
Note that forb =b2we have E( ) Z
(E( ) b2)f( )d = 0:ThusV2(d(2)0 (b2); b2) V2(d(1)0 (b2); b2) =
V1(d(1)0 (b2); b2):Therefore there exist b2 b2 such that V2(d(2)0 (b2); b2) =V1(d(1)0 (b2); b2):Similarly
we establish thatV3(d(3)0 (b); b)> V2(d(2)0 (b); b) for b2[0; b1):
References
[1] Amador, M., Bagwell, K. 2011. The theory of optimal delegation with an application to tari¤ caps. Working paper. Stanford University.
[2] Alonso, R., Matouschek, N. 2008. Optimal delegation. Review of Economic Studies, 75:259-293.
[4] Austen-Smith, D., 1994, Strategic Transmission of Costly Information, Econometrica, 62, 955-964.
[5] Frankel, A., 2012. Delegating multiple decisions. Working paper, Chicago Booth.
[6] Holmström, B. 1977. On incentives and control in organizations. PhD thesis. Stanford.
[7] Holmström, B. 1984. On the theory of delegation. In: Bayesian models in economic theory. Elsevier Science Ltd.
[8] Kovac, E., Mylovanov, T. 2009. Stochastic mechanisms in settings without monetary transfers: the regular case. Journal of Economic Theory, 114:1373-1395.
[9] Lewis, T. Sappington, D. 1993. Ignorance in Agency Problem. Journal of Economic Theory, 61, 169-183.
[10] Melumad, N., Shibano, T. 1991. Communication in Settings with no Transfers. Rand Journal of Economics, 22: 173-198.