International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 7, July 2014)
578
Segmentation of Mass Region in Abnormal Mammogram Using
Deformable Model
YoussefBenYoussef
1, El hassaneAbdelmounim
2, JamalZbitou
3, AbdelazizBelaguid
41,2
LASTI University Hassan 1st Settat Morocco
3LITEN University Hassan 1st Settat Morocco
4LPFMP University Mohammed V Souissi Rabat, Morocco.
Abstract—Nowadays diagnostic imaging is a golden tool in medicine. For a radiologist, the image is an information medium which can lead to serious decisions. However, the image may be corrupted by noise or may be tied up with irrelevant information, and hence gives difficulties to extract the important information from the image with conventional methods. Medical image segmentation technique is done in order to isolate the abnormalities region, and the background. Thereby in image segmentation applications active contours or snakes are used in order to locate, and delineate the object boundaries of region. In this paper we have studied and validated a parametric active contour method for mass segmentation in region of interest (ROI) of abnormal mammogram. We used three classes of external force for active contour model : gradient vector flow (GVF), balloon snake, and distance snake. The obtained results show that the distance snake is among the best segmentation methods which permit to locate the exact boundary of mass region..
Keywords— Mammography, Masses, Deformable models, Image segmentation, Medical image analysis.
I. INTRODUCTION
Some imaging modalities such as Digital Mammography (DM), Magnetic Resonance Imaging (MRI), Computed Tomography (CT) are non-invasively mapping the anatomy of a subject. Medical image segmentation is a tool with tremendous usefulness. Biomedical and anatomical information are made easy to obtain as a result of success achieved in automating image segmentation. Noise, artifacts and weak contrast are the main causes of poor image quality and make the interpretation of medical images very difficult. In medical image analysis, a fundamental problem is segmentation which identifies the boundaries of organs or abnormal regions (i.e. tumors) in image. Digital mammography is considered to be ―the gold standard‖ in breast imaging, and all new techniques are compared to it. Therefore, the aim of segmentation is to simplify and/or to change the representation of an image into subset that is more meaningful and easier to analyze.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 7, July 2014)
579 II. BASIC THEORY
The active contour model or snakes model were proposed by Kass et al [10]. The snake's general form represents a contour by a vector v(s)
x(s),y(s)
where
0,1
s denotes the arc length parameter, which moves
through the spatial domain of an image to minimize the energy functional. x(s) , and y(s) refer to its location in xy plane. The snake has a dynamic behaviour that begins from an initial position and converges to the boundary of the object in the image. It moves through the domain of the image by minimizing its energy function,
E
snake which is defined as)
1
(
))]
(
(
))
(
(
[
1 0int
v
s
E
v
s
ds
E
E
snake
extWhere the internal energy function is
)
2
(
)
(
)
(
2
1
))
(
(
2 2 2 2 int
s
s
v
s
s
v
s
v
E
erne
In Eq(2) α and β are the parameters of the internal energy function. α is the elasticity parameter, and β is the rigidity parameter. Choice of the values of α and β controls the shape which the snake aims to attain. In practice, α and β are often chosen to be constants. The natural behaviour of the snake and the arrangement of their points are controlled by the internal energy.
The external energy function Eext (v(s)) is derived from the image information and it drives the curve to the boundary of the object, and helps the contour to overcome the initialization problem. On the other hand the external energy attracts the snake to choose low-level features such as edge points.
By calculation of variation in equation (1) minimizing Esnake with the contour, the Euler–Lagrange condition gives [10]
)
3
(
0
))
(
(
.
)
(
)
(
4 4 2 2
E
v
s
s
s
v
s
s
v
ext
Where
is a gradient operator. A finite element formulation, and including finite difference method serves as a comprehensive the snake variants [11,12]. To incorporate powerful and useful, concepts of energy, force, velocity, and curve constraints deformable contours based solutions are highly analytical and involve extensive numerical computations [13].A number of approaches have been proposed to solve the partial differential. Equation (3). In many application, a dynamic programming[16] and greedy snake [15] are used. For numerical solution of the Eq(3) and in the discrete domain the snake energy can be expressed as
(
)
(
4
)
2
1
)
(
v
vAv
E
v
E
extWhere v is the discretized version of the contour and A is the stiffness matrix. Minimum energy estimation is equivalent to solve the linear equation
)
5
(
F
Av
Where A is the pentadiagonal stiffness matrix, v and F represent the position vectors, and the corresponding force respectively. To solve Eq(5) iteratively the successive over-relaxation method can be applied[16].
Equation (3) can be viewed as an equation balancing internal and external forces at equilibrium given by
0
int
F
ext
F
,where ) 5 ( )) ( ( . ) ( ) ( 4 4 2 2 int s v E F s s v s s v F ext ext
The convergence of snakes contours depends on the weight of internal and external forces, where the minimum energy can be found. However, there are several limitations to snake methods based on variational principles :
- The initial contour should be placed near the desired contour which make the snake is interactive.
- Image noise can affect the contour to be easily attracted to a local energy minimum, which does not correspond to the contour.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 7, July 2014)
580 III. PARAMETRIC DEFORMABLE MODEL
A. Balloon Snake
As proposed by Cohen [11,17] the balloon snake uses the sum of pressure energy and image energy. The balloon snake uses the external force function
)
6
(
)
(
.
)
(
k
n
s
f
f
k
v
F
ext pres
Where k is the classical external force parameter, f is an edge map for the input image I, and
f
(
x
,
y
)
is the gradient of image edge map.n s
( )
is the normal unit vector to the contour with magnitude kpres at location x(s), y(s). The first term in Eq (6) is the classical term introduced by Kass. The second term namely pressure pushes the contour boundary toward the edges, and consequently makes simple process for initialization of the snake. The limitation of this model is that it may become strong enough to ignore the image gradient force in weak object edges.B. Distance snake
Using a finite element method, Cohen and Cohen [11] implemented a deformation strategy named the distance snake. Distance snake uses distance energy plus image energy as their external energy terms. The distance snake uses the external force function defined as follows
)
7
(
)
(
)
(
v
k
d
v
F
ext
In Eq(7), k is a constant , and d(v) is pixel distance of the image. It’s the smallest normalized Euclidean distance from v(x,y) to an edge point with the edge point identified by a threshold gradient.
C. Gradient Vector Flow Snake
GVF snake is defined by Xu and Prince [21,22]. They use a vector flow g(x,y)=(u(x,y),v(x,y)) that minimizes the external energy
) 8 ( )
( )
(v u2 u2 v2 v2 f 2g f 2dxdy
Eext
x y x y Where f is an edge map for the input image I,
f
(
x
,
y
)
is the gradient of image edge map, and µ is the weight parameter. A GVF deformable model does not need prior knowledge about whether to shrink or expand toward the boundary and moves snakes into boundary concavities. With calculation of variation, we can determine the value of g by solving the following two Euler equations
) 9 ( 0 )
(
0 )
(
2 2
2 2
f f v v
f f u u
y x
To solve the equations, (u, v) are treated as functions of time and solve the system iteratively using central difference method. We note that in the homogenous region the second term in both regions is zero because
f
0
. In GVF the resulting field has a large capture range and forces the active contour into concave regions. But it is a time consuming to compute the energy map.IV. DATA AND METHODOLOGY
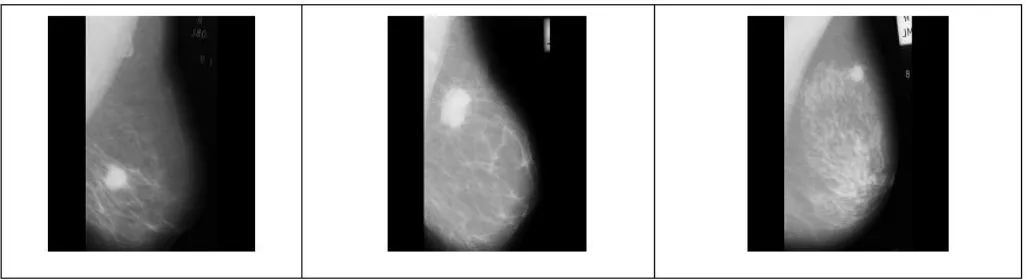
[image:3.612.50.565.551.691.2]The mammographic images which contain region masses are obtained from Mammographic Image Analysis Society (MIAS) database [23]. Figure 1 shows samples of abnormal mammogram (mdb028, mdb184, mdb202) where we can identify mass region. For reduction of processing time, and remove unnecessary data the image is cropped.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 7, July 2014)
581 This image is saved in a standard size of 200 by 200 pixels. A Gaussian filter is the only pre-processing performed on the image for blurring the edge maps. The next stage is the implementation of balloon snake, GVF snake, and distance snake. The algorithms were implemented in Matlab environment. The initial contour can be initialized far away from the boundary automatically or manually. However, for reducing the computational cost we used a contour near the object boundaries as the initial contour.
We fixed experimentally some parameter values for all the images: The number of iterations for snakes distance is standardized to 80 which are enough for our image. The pressure energy for balloon snake is 0.5. In GVF snake, the weighting parameter µ=0.2 with 80 iterations
V. EXPERIMENTAL RESULTS
Figure 2 illustrates some of the segmentation results for GVF, distance snake, and balloon snake. Image (a) shows the original mammogram. The image (b) in Fig 2 shows that, in blue, the contour obtained by GVF after its convergence.
We can see that part of the resulting contour does not correspond to the mass boundary, which is caused by a local minimum of the model’s energy. In image (c), one can observe that the model’s solution captures the desired boundaries. On the other hand it shows that, in green, the distance snake is easily trapped to the boundaries of the mass compared to the other techniques. Furthermore, in the image (d), it is shown that the balloon snake overwhelms the boundary of the image. This due to the pressure energy terms used in balloon snake that is hard to be determined. It is clear that the image is not perfectly segmented by balloon snake but partially with the GVF. The balloon snake method had a positive inflation force value in order to expand the initial contour to the mass boundary. It can be seen that the contour deflated into the mass region from the overlapping regions of the top right and bottom of the suspicion region. The balloon and GVF snakes extracted almost all the boundary except the bottom, and right contour segment. With simple initial contour, these snakes cannot catch the attraction forces from all the edge points in the external force field.
Fig2:(a): Original image cropped, (b):Image segmented by GVF, (c) Image segmented by Distance Snake, (d): Image segmented by Balloon Snake.
VI. CONCLUSION
The complex anatomic structures present many challenging problems for computer vision community in search for a good segmentation model in medical image. In search for a good segmentation model in medical image, snakes have been proved to be very attractive approach, and have produced good results in several areas of image segmentation such as MRI knee image, Light microscopy blood cell image, MRI brain image, Ultrasound heart image [15,24].
Our work serves to detect the boundary of the mass region in abnormal mammogram, extract some parameter characterizing the mass, and assist radiologists in locating potentially cancerous cases for further analysis such as the classification of malignant or benign mammogram, or in tissue sampling in the biopsy procedure
REFERENCES
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 7, July 2014)
582
[2] Stytz.M, Frieder.G, and Frieder.O.1991 Three dimensional medical imaging : Algorithms and computer systems. ACM Computing Surveys 23(4):421–499.
[3] Ayache,N. 1995a Medical computer vision, virtual reality and robotics. Image and Vision Computing 13(4):295–313.
[4] T. Ojala, J. Liang, J. Nappi, O. Nevalainen. 1999 Interactive segmentation of the breast region from digitized mammograms with united snakes. Technical Report University of Turkey, Finland. [5] Basavaraj Amarapu P. K. Kulkarni. 2011 External Force for
Deformable Models in Medical Image Segmentation : A Survey. Signal & Image Processing. An International Journal (SIPIJ) Vol.2, No.2.
[6] McInerney, T. and Terzopoulos, D. 1995 A Dynamic Finite Element Surface Model for Segmentation and Tracking in Multidimensional Medical Images with Applications to Cardiac 4D Image Analysis. Computerized Medical Imaging and Graphics 19(1):69-83.
[7] McInerney.T, and Terzopoulos. D. 1996 Deformable Models in Medical Image Analysis : A Survey. Published in Medical Image Analysis, 1 (2) : 91–108..
[8] Abdul Kadir Jumaat, Yasiran. S, S,Wan Eny Zarina W.A.R, Malek. A. A. 2011 Boundary Segmentation of Microcalcification using Parametric Active Contours. International Science Index Vol: 6, No : 8..
[9] Terzopoulos, D. Fleischer,K. 1988 Deformable models. Visual Comput 4 (6) : 306–331.
[10] Kass,M. Witkin, A. Terzopoulos, D. 1988 Snakes : Active contour models. International .Journal of Computer Vision. 1, 321–331. [11] Cohen, L., and Cohen, I. 1993 Finite element methods for active
contour models and balloons for 2D and 3D images, IEEE Trans. On Pattern Analysis and Machine Intelligence 15 .1131-1147.
[12] Sandberg, K. 2001 Visualizing Calculus: The use of the Gradient in Image Processing. University of Colorado, Boulder
[13] Lei, He. Zhigang, Peng. Bryan, Everding. Xun, Wang .Chia, Y. Han Kenneth, L. Weiss, William, G, Wee. 2008. Review A comparative study of deformable contour methods on medical image segmentation. Elsevier. Image and Vision Computing 26 : 141–163. [14] Amini. A.A, Weymouth.TE, and Jain.RC.1990 Using Dynamic programming for solving variational problems in vision. IEEE Trans Pattern Anal Machine Intell 12:855–867
[15] Donna.J.Williams, and Mubarack shah. 1992 A fast algorithm for active contours and curvature estimation. CVGIP: image understanding, Vol55,No 1,Junuary,pp,14-26.
[16] Saad,Y. 2003 Iterative methods for sparse linear systems, 2nd
edn.s.l. SIAM Publisher, Philadelphia.
[17] L, Cohen. 1991 On active contour models and balloons, CVGIP Image Understand .52 (2) (1991), 211–218.
[18] J.Sethian. 1996 A fast marching level set method for monotonically advancing fronts, Proc.Nat l. Acad .Sci.USA93 (4) 1591–1595 [19] R. Ronfard. 1994 Region based strategies for active contour models,
Int. J. Comput.Vis.13(2)229–251.
[20] N, Paragios, R, Deriche. 2002 Geodesic active region and level set methods for supervised texture segmentation, Int. J. Comput. Vis. 46(3) 223–247.
[21] Xu.C, J.L. Prince. 1998 Gradient vector flow: A new external force for snakes, Proceedings of the international IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 66– 71, 1. [22] Xu.C, Prince. J. 1998 Snakes, shapes, and gradient vector flow.
IEEE Trans Image Process 7:359–369.
[23] J, Suckling. J, Parker. D, Dance. S, Astley. I, Hutt. C,Bog-gis. 1994 The mammographic image analysis society digital mammogram database. exerpta medica. International congress series Vol.1069, pp.375-378.