International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 10, October 2014)
167
A Novel Approach to Palm Print Classification Using Global
Features
Priyanka A. Mane
1, A. S. Gaikwad
2Computer Science and Engineering, Deogiri Institute of Engineering and Management Studies, Aurangabad, India Abstract—Three dimensional palm print has proved to be
significant biometric for personal authentication. Personal authentication plays a key role in application of public security, access control, forensics and e-banking etc. 2-D palm print has been recognized as an effective biometric identifier in past decade. 3-D palm print system develops to capture the depth information of palm print. The previous work of 3-D palm print recognition done using local features such as line, texture, wrinkles, point but in this we are using the global features such as width, length and area of the palm. In that describe shape information and can be used for coarse matching and indexing to prove the efficiency of palm print recognition. there are three features used such as 1) maximum depth of palm center 2) horizontal cross sectional area of different level, 3) radial line length from the centroid of the boundary of 3-D palm print horizontal cross section of different level. For reduce the dimensionality there is use the orthogonal linear discriminant analysis and also use two classifier 1) ranking support vector machine 2) K-Nearest Neighbor . These are use for improve the efficiency of palm print recognition. Palm print has been widely studied as its high accuracy and low cost. Most of the previous studies are based on two dimensional (2D) image of the palm print. 2D images are easily affected by noise, such as scrabbling and dirty in the palm. To overcome these shortcomings, we develop a three dimensional (3D) palm print identification system.
Keywords—3D Palm print identification, global features, print indexing, OLDA, Ranking SVM, KNN classifier.
I. INTRODUCTION
Palm print recognition has now been a topic of research for over ten years. The commonly used biometric characteristics include fingerprint, face, iris, signature, gait, etc. In the past decade, palm print recognition has grown rapidly, starting from the inked palm print-based off line methods and developing to the charge-coupled device (CCD) camera-based online methods. Almost all the current palm print-recognition techniques and systems are based on the 2-D palm images (inked images or CCD camera-captured images). Although 2-D palm print recognition techniques can achieve high accuracy, the 2-D palm print can be counterfeited easily and much 3-D palm structural information is lost in the 2-D palm print acquisition process.
Palm print images are cheaper to collect and more acceptable than iris. Palm prints can distinguish between individuals more accurately than face and can also identify monozygotic twins. The texture-based methods include Palm Code, Competitive Code and Ordinal Code. These methods use a group of filters to enhance and extract the phase or directional features which can represent the texture of the palm print. Line-based methods use line or edge detectors to explicitly extract line information from the palm print that is then used for matching. The representative methods include Derivative of Gaussian based line extraction and Modified Finite Radon transform (MFRAT) based line extraction. In this paper, we propose extracting three novel global features from a 3D palm print image: Maximum Depth (MD) at the center of the palm, Horizontal Cross-section Area (HCA) at different levels of the palm; and Radial Line Length (RLL) measured from the centroid to the boundary of the 3D palm print. These features are then used to describe and classify the shape of the 3D palm print using continuous classification. This involves first reducing the dimensionality of the features by treating these features as a column vector and applying Orthogonal Linear Discriminant Analysis (OLDA). We then improve the efficiency of palm print recognition by indexing the database using coarse-level matching, Ranking Support Vector Machine (RSVM) and KNN. Palm print identification systems measure and compare ridges, lines and Minutiae found on the palm. Palm print recording and identification for law enforcement purposes has been in existence almost as long as palm prints systems are reported to comprise 30% of all crime scene marks.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 10, October 2014)
168 II. DETAILS EXPERIMENTAL
A. Region of Interest
[image:2.612.325.562.129.283.2]First extract the region of interest (ROI) and then use global features. region of interest use to remove the noisy boundary region and then segment image in points from the top, bottom, left, and right. A region of interest (ROI) is a portion of image that defines an ROI by creating a binary mask. The binary mask which is a binary image that is the same size as the image to process with pixels that define the ROI. Large ROI may contain noisy data, so we use a mask to remove the noisy data according to the gradient of the 3-D data. Using ROI we obtain original 3D palm print data then extract these using global features these are maximum depth, horizontal cross sectional area and radial line length.
Fig. 1. Extracted 3D ROI
1. Maximum Depth:
MD is the maximum depth value of the 3D palm from the reference plane. The depth of the reference planeis the mean depth of the points contained by this rectangle as shown in fig.2.
Fig. 2. Illustration of the MD feature (with color denoting the depth of the 3-D ROI). (a) Location of the two rectangles used to calculate the reference plane and to find the MD point. (b) Illustration of the
MD feature.
The reason we choose this region is that, in the 3-D ROI, it appears to be relatively flat. After getting the reference plan (dr) that is mean depth value is
(1)
dij- is the depth value of row and column point of 3D ROI.
mij- is the corresponding mask value and Rs, Cs ,Re, Ce is the starting and ending row and column. After getting the dr we find Maximum Depth is the
MD = dmax – dr (2) 2. Horizontal cross sectional area:
[image:2.612.48.294.323.471.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 10, October 2014)
[image:3.612.54.289.138.314.2]169 Fig. 3.Corresponding countor cutting by the equidistance horizontal
plan.
In Fig. 3, the blue curves denote deeper levels, the red curves denote higher levels, and the remaining curves are medium levels. After getting the cross section levels L we easily calculate the HCA(fig.4 show the Cross sectional area features).
[image:3.612.324.565.189.305.2]
(3)
Fig. 4. Cross sectional area features.
3. Radial line length
We propose the RLL feature which describes the shape of the contour. First, we calculate the centroid of the first level L1; thereafter, we treat it as the centroid of all levels.
Then, from the centroid, we draw M radial lines which intersect with the contour of every level. The distance between the intersection and the centroid is defined as the RLL (fig. 5 show the example of radial line length).
Fig. 5.Radial line starting from the centroid (from left to right: M = 8)
B. Classification with global features
Depending on the objective and the characteristics of the image data, the classification classes should be clearly defined. We then improve the efficiency of palm-print recognition by applying coarse level matching and RSVM to the low-dimensional vectors and also use the KNN vector for the comparison with RSVM.
1. Orthogonal Linear Discriminant Analysis:
It is use to reduce the dimensionality. OLDA has been used successfully in many statistical pattern recognition problems. Linear Discriminant analysis explicitly attempts to model the difference between the classes of data. LDA is a powerful face recognition technique that overcomes the limitation of Principle component analysis technique by applying the linear discriminant criterion. This criterion tries to maximize the ratio of the determinant of the between-class scatter matrix of the projected samples to the determinant of the within class scatter matrix of the projected samples. Linear discriminant group images of the same class and separates images of different classes of the images. The objective is to find the optimal projection which simultaneously minimizes the within-class distance and maximizes the between-class distance, thus achieving maximum discrimination (here, the ―class‖ is used to denote the identity of the subjects, e.g., the samples collected from one palm are regarded as one class).
[image:3.612.51.288.416.653.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 10, October 2014)
170 Given a training database which has n samples and k classes as X = [X1,X2, . . . , Xk], where Xi ∈
_(1+N+N×M)×ni , i = 1, 2, . . . , k, adopting OLDA, The optimal projection W can be
calculated.
Then use the coarse level matching to compare the similarity of two samples.
2. Ranking Support vector machine classification:
Viewing input data as two sets of vectors in an n-dimensional space, a SVM will construct a separating hyperplane in that space, which maximizes the margin between the two data sets. In the case of support vector machine, an object is viewed as a n-dimensional vector and we want to separate such objects with a n-1 dimensional hyperplane. This is called a linear classifier. There are many hyperplanes that might classify the data, we also interested in finding out whether we can get the maximum margin between the two data sets. The goal of SVM is try to address the nearest distance between a point in one class and a point in the other class being maximized and draw a hyperplane to classify two categories as clearly as possible. Coarse-level matching scheme is a simple and easy way to reduce retrieval times. It is more useful for palm-print recognition if we can rank the candidate samples in the database in descending order according to the aforementioned global features. Searching for the closest matches to a given query vector in a large database is time consuming if the vector is even moderately high dimensional. However, the complexity of these methods grows exponentially with increasing dimensionality. Given a query qk, k = 1, 2, . . . , n and a sample collection D = {d1, d2, . . . , dm}, the optimal retrieval system should return a ranking r∗k, k = 1, 2, . . . , n, that orders the samples in D according to their relevance to the query. In this paper, the query q and the sample d are the Γ-dimensional global features as described earlier. In our approach, if a sample di is ranked higher than dj in some ordering r, i.e., r(di) > r(dj), then (di, dj) ∈ r; otherwise, (di, dj) _∈ r.
4. KNN Classification:
KNN stands for ―k-nearest neighbor algorithm‖, it is one of the simplest but widely using machine learning algorithm. An object is classified by the ―distance‖ from its neighbors, with the object being assigned to the class most common among its k distance-nearest neighbors. If k = 1, the algorithm simply becomes nearest neighbor algorithm and the object is classified to the class of its nearest neighbor.
Distance is a key word in this algorithm, each object in the space is represented by position vectors in a multidimensional feature space. It is usual to use the Euclidean distance to calculate distance between two vector positions in the multidimensional space.
III. EXPERIMENT AND ANALYSIS
In order to carry image processing experiment; we require a digital image. The digital image can be inputted and related experiment can be carried and related results can be formed. So such image database is provided to the researcher to explore the related scientific research.
The Hong Kong Polytechnic University (PolyU) 3D_Palmprint Database is an existing palm print image database made available world-wide to advance research in the area of biometrics palm print recognition system. The Biometric Research Centre (UGC/CRC) at The Hong Kong Polytechnic University [6] has developed palm print database. To advance research and to provide researchers working in the area palm print recognition a platform to compare the effectiveness of palm print recognition algorithms. They intend to publish our palm print database, making it freely available for academic, noncommercial uses. Palm print has proved to be one of the most unique and stable biometric characteristics. The palm prints refer to the image acquired of the palm region of the hand. The palm print image databases are made available world-wide to advance research and to provide researchers working in the area of palm print recognition system.
The PolyU 3D Palm print Database contains two sessions first is for 3D samples which collected 54 samples and the second session is for 2D samples it also collected 54 sample which contain the related features of 3D samples. The average time interval between the two sessions is one month. The all palm print images are of same size and same dimension palm print image such as 128 X 128. And each 2D palm print image was recorded in BMP format image file. The palm print images have a
name sequence and can be interpreted as follows- e.g. - A palm print image name ―Sub2D_I_7_9.bmp‖ can
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 10, October 2014)
171 To select the values of M and N, we carried out a series of verifications on the training database where the class of the input palm print was known. Each of the 3-D samples was matched with the remaining samples in the training database. A successful match is where the two samples are from the same class. An unsuccessful match is referred to as interclass matching, and the candidate image is said to be an impostor. Treating the global features as a point in the 1 + N + N ×M dimension space, we simply use the Euclidian distance as the matching score. In order to balance accuracy and efficiency, we chose N = 8 and M = 32 in the following experiments. This means that the global features have 1 + N + N ×M = 265 dimensions.
[image:5.612.323.566.142.389.2]We used three 3-D palm-print recognition matching approaches:1) no classification 2) RSVM, and 3) KNN For no classification, we matched using the local feature MCI. RSVM and KNN are use to match the test database with the train database. The SVM accuracy is lower than the KNN. Which is find by using confusion matrix, also known as error matrix is a specific table layout that allows visualization of the performance of an algorithm. The accuracy of KNN and SVM check for all the images which is given in database so overall the KNN accuracy is greater than the SVM. In fig.6 shows the accuracy for KNN is 82% and the accuracy of SVM is 70%. The computation time of SVM is less than the KNN. When in train database given seven samples to match with the test database one sample then the KNN takes a more time for the result.
Fig.6. Accuracy of SVM and KNN for one sample.
So using the below equation we find the accuracy :
Sensitivity = TP / (TP+FN) (which is correct :P )
Specificity = TN / (TN+FP) (which is also correct! :P )
Table I.
Compared Accuracy of the RSVM and KNN
Sr.NO Name of Image Ranking support vector machine accuracy
K-nearest neighbors accuracy
1 Sub2D_I_7_0 83.75% 92.50%
2 Sub2D_I_8_1 82.50% 95%
3 Sub2D_I_9_3 78.72% 92%
4 Sub2D_I_10_8 81.50% 91.25%
Graph for the compared accuracy of ranking SVM and KNN.
70 75 80 85 90 95 100
RSVM KNN
RSVM
KNN
[image:5.612.328.562.425.604.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 10, October 2014)
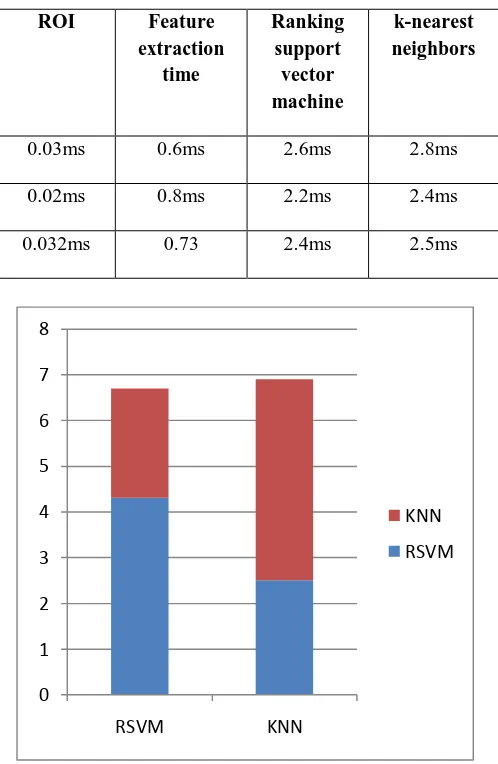
[image:6.612.44.293.173.555.2]172 3. Running time comparison:
Table II.
Running time comparison of 3D palm print recognition approaches
ROI Feature
extraction time
Ranking support vector machine
k-nearest neighbors
0.03ms 0.6ms 2.6ms 2.8ms
0.02ms 0.8ms 2.2ms 2.4ms
0.032ms 0.73 2.4ms 2.5ms
0 1 2 3 4 5 6 7 8
RSVM KNN
KNN
RSVM
Graph 2. Comparing time complexity between RSVM and KNN
IV. CONCLUSION
In this paper use the three global features these are MD, HCA and RLL. These are extracting the features of images. These are not correlated with 2D images. We improve the efficiency of 3D palm print recognition using RSVM and KNN. KNN is given the accurate result for the matching which are find using confusion matrix. So the accuracy of KNN is better than the RSVM.
V. FUTURE SCOPE
Image-based palm recognition is still a very challenging topic after decades of exploration. A number of typical algorithms are available. KNN provides one of the best techniques for palm recognition. It overcomes the limitations of previously implemented face recognition methods and also it given best accuracy. Sensitivity to variations in pose and different lighting conditions is still a challenging problem. Again updating the palm database manually is a limitation of this palm recognition system that needs to be overcome.
The identification of known palm is quite good by SVM and KNN. But KNN and SVM depends on threshold value to differentiate between palm and non-palms. This threshold may vary depending on images in the database. It is hard to decide suitable threshold value. In the future we can use the other technique for the classification like decision tree.
REFERENCES
[1] A. K. Jain and J. J. Feng, ―Latent palmprint matching,‖ IEEE Trans Pattern Anal. Mach. Intell., vol. 31, no. 6, pp. 1032–1047,Jun. 2009.
[2] D. Zhang, A. W. K. Kong, J. You, and M. Wong, ―On-line palmprint identification,‖ IEEE Trans. Pattern Anal. Mach. Intell., vol. 25, no. 9, pp. 1041–1050, Sep. 2003.
[3] C. Samir, A. Srivastava, and M. Daoudi, ―Three-dimensional face recognition using shapes of facial curves,‖ IEEE Trans. Pattern Anal. Mach.Intell., vol. 28, no. 11, pp. 1858–1863, Nov. 2006.
[4] P. Yan and K. W. Bowyer, ―Biometric recognition using 3D ear shape,‖ IEEE Trans. Pattern Anal. Mach. Intell., vol. 29, no. 8, pp. 1297–1308, Aug. 2007.
[5] H. O. Saldner and J. M. Huntley, ―Temporal phase unwrapping: Application to surface profiling of discontinuous objects,‖ Appl. Opt., vol. 36, no. 13, pp. 2770–2775, May 1997.
[6] D. Zhang, G. Lu, W. Li, L. Zhang, and N. Luo, ―Palmprint recognition using 3-D information,‖ IEEE Trans. Syst., Man, Cybern. C, Appl. Rev.vol. 39, no. 5, pp. 505–519, Sep. 2009. [7] X. Q.Wu, D. Zhang, K. Q.Wang, and B. Huang, ―Palmprint
classification using principal lines,‖ Pattern Recognit., vol. 37, no. 10, pp. 1987–1998, 2004.
[8] A. Lumini, D. Maio, and D. Maltoni, ―Continuous vs. exclusive classification for fingerprint retrieval,‖ Pattern Recognit. Lett., vol. 18, no. 10, pp. 1027–1034, Oct. 1997.
[9] H. Chen and B. Bhanu, ―Efficient recognition of highly similar 3D objects in range images,‖ IEEE Trans. Pattern Anal. Mach. Intell., vol. 31, no. 1, pp. 172–179, Jan. 2009.
[10] Jifeng Dai, Jianjiang Feng, Member, IEEE, and Jie Zhou, Senior Member, IEEE,‖ Robust and Efficient Ridge-Based Palmprint Matching‖, VOL. 34, NO. 8, AUGUST 2012.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 10, October 2014)
173 [12] A. Kong and D. Zhang, ―Competitive Coding Scheme for Palmprint
Verification,‖ Proc. 17th Int’l Conf. Pattern Recognition, vol. 1, 2004.
[13] A. Kong, D. Zhang, and M. Kamel, ―Palmprint Identification Using Feature-Level Fusion,‖ Pattern Recognition, vol. 39, no. 3, pp. 478-487, 2006.
[14] A. Kumar and D. Zhang, ―Personal Recognition Using Hand Shape and Texture,‖ IEEE Trans. Image Processing, vol. 15, no. 8, pp. 2454-2461, Aug. 2006.
[15] Eryun Liu, Anil K. Jain, Fellow, IEEE, and Jie Tian, Fellow, IEEE ― A Coarse to Fine Minutiae-Based Latent Palmprint Matching‖, IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 35, NO. 10, OCTOBER 2013.
[16] ― Personal Verification using Palmprint and Hand Geometry Biometric‖, Department of Computer Science, Hong Kong University of Science and Technology, Clear Water Bay, Hong Kong.Pattern Recognition and Image Processing Lab, Department of Computer Science and Engineering, Michigan State University, East Lansing, MI 48824.
[17] Mr. Shriram D. Raut, Dr. Vikas T. Humbe,‖Biometric Palm Prints Feature Matching for Person Identification‖, Department of Computer Science and Application, Solapur University, Solapur, MH, India Department of Computer Science, SRTMUN University, Latur, MH, India
[18] Wei Li, David Zhang, Lei Zhang, Guangming Lu, and Jingqi Yan, ―3-D Palmprint Recognition With Joint Line and Orientation Features‖.