R E S E A R C H
Open Access
A new explicit iteration method for
variational inequalities on the set of common
fixed points for a finite family of
nonexpansive mappings
Jong Kyu Kim
1*and Nguyen Buong
2*Correspondence: [email protected] 1Department of Mathematics Education, Kyungnam University, Changwon, 631-701, Korea Full list of author information is available at the end of the article
Abstract
In this paper, we introduce a new explicit iteration method based on the steepest descent method and Krasnoselskii-Mann type method for finding a solution of a variational inequality involving a Lipschitz continuous and strongly monotone mapping on the set of common fixed points for a finite family of nonexpansive mappings in a real Hilbert space.
MSC: 41A65; 47H17; 47H20
Keywords: contraction; common fixed points; hybrid steepest descent method; nonexpansive mappings; monotone mappings
1 Introduction and preliminaries
LetCbe a nonempty closed and convex subset of a real Hilbert spaceHwith the inner product·,·and the norm·, and letF:H→Hbe a nonlinear mapping. The variational inequality problem is to find a pointp∗∈Csuch that
Fp∗,p–p∗≥, ∀p∈C. (.)
Variational inequalities were initially studied by Kinderlehrer and Stampacchia in [], and since then have been widely investigated. They cover partial differential equations, optimal control, optimization, mathematical programming, mechanics, and finance (see [–]).
It is well known that ifFis anL-Lipschitz continuous andη-strongly monotone,i.e.,F
satisfies the following conditions:
F(x) –F(y)≤Lx–y,
F(x) –F(y),x–y≥ηx–y,
whereLandηare fixed positive numbers, then (.) has a unique solution. It is also known that (.) is equivalent to the fixed point equation
p=PC
p–μF(p), (.)
wherePCdenotes the metric projection fromx∈HontoCandμis an arbitrarily positive
constant.
The fixed point formulation (.) involves the metric projectionPC. To overcome the
complexity caused byPC, Yamada [] introduced a hybrid steepest descent method for
solving (.). His idea is stated as follows. Assume thatC=Ni=Fix(Ti), the set of common
fixed points of a finite family of nonexpansive mappingsTionHwith an integerN≥.
Recall thatT:H→His nonexpansive if
Tx–Ty ≤ x–y, ∀x,y∈H
and
Fix(T) ={x∈H:x=Tx}
denotes the fixed point set ofT. Yamada proposed the following algorithm in []
uk+=T[k+]uk–λk+μF(T[k+]uk), (.)
where T[n]=TnmodN, for integern≥, with the mod-function taking values in the set
{, , . . . ,N}, μ∈(, η/L) and{λk} ⊂(, ), and proved that the sequence{uk}in (.)
converges strongly top∗under the following conditions:
(L) limλk= ;
(L) λk=∞;
(L) |λk–λk+N|<∞.
Further, Zeng and Yao [] proved the same result with (L) replaced by
(L) lim(λk–λk+N)/λk+N = .
Theorem .[] Let H be a real Hilbert space,and let F:H→H be an L-Lipschitz con-tinuous and η-strongly monotone mapping for some constants L,η> .Let{Ti}Ni= be N
nonexpansive self-maps of H such that C=Ni=Fix(Ti)=∅,μ∈(, η/L),and let
condi-tions(L), (L), (L)be satisfied.Assume in addition that
C=
N
i=
Fix(Ti) =Fix(TT· · ·TN)
=Fix(TNTT· · ·TN–)
=· · ·
=Fix(TT· · ·TNT). (.)
Then the sequence{uk}defined by(.)converges strongly to the unique element p∗in(.).
It is not difficult to show that (L) implies (L) iflimλk/λk+Nexists. However, in general,
conditions (L) and (L) are not comparable,i.e., neither one of them implies the other (see [] for details).
Recently, Zenget al.[] proposed the following iterative scheme:
uk+=T[k+]uk–λk+μk+F(T[k+]uk), (.)
Theorem .[] Let H be a real Hilbert space,and let F:H→H be an L-Lipschitz con-tinuous and η-strongly monotone mapping for some constants L,η> .Let{Ti}Ni= be N
nonexpansive self-maps of H such that
C=
N
i=
Fix(Ti)=∅,
and letμk∈(, η/L).Assume that the following conditions hold:
(i) λk=∞,where{λk} ⊂(, );
(ii) |μk–η/L| ≤
η–cL/Lfor somec∈(,η/L); (iii) lim(μk+N– (λk/λk+N)μk) = .
Assume in addition that(.)holds.If
lim sup
k→∞
T[k+N]· · ·T[k+]uk–uk+N,T[k+N]· · ·T[k+]uk–uk ≤, (.)
then the sequence{uk}defined by(.)converges strongly to the unique element p∗in(.).
They also showed that conditions (L), (L) and (L) are sufficient for{uk}to be bounded
and
lim
k→∞uk–T[k+N]· · ·T[k+]uk= .
So, (.) is satisfied. They did not give another sufficient condition different from (L), (L) and (L).
LetFx=Ax–u, whereAis a self-adjoint bounded linear mapping such thatAis strongly positive,i.e.,
Ax,x ≥ηx, ∀x∈H
anduis some fixed element inH. Xu [] introduced the following iteration process:
uk+= (I–λk+A)Tk+uk+λk+u, (.)
whereIis the identity mapping ofH, and proved the following result.
Theorem .[] Let conditions(L), (L)and(L)or(L)be satisfied.Assume in addition that(.)holds.Then the sequence{uk}generated by algorithm(.)converges strongly to
the unique solution of(.)with Fx=Ax–u.
Very recently, Liu and Cui [] showed that the condition
C=
N
i=
Fix(Ti) =Fix(TT· · ·TN) (.)
is sufficient for (.) ifC=∅.
point problems to solve (.) withC=Ni=Fix(Ti), whereTiis a nonexpansive mapping
onHfor eachi.
Given a starting pointx∈H, the iteration is defined by ⎧
⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
x∈H,
y
k= (I–λkμF)xk,
yki = ( –βki)xk+βkiTiyik–, i= , . . . ,N,
xk+=yNk,
(.)
and the sequences of parameters{λk}and{βki} ⊂(, ) satisfy the following conditions:
⎧ ⎪ ⎪ ⎨ ⎪ ⎪ ⎩
λk→ ask→ ∞ and
λk=∞;
βki→βi, <βi< ,i= , . . . ,N– ; <lim infk→∞βkN≤lim supk→∞βkN< .
(.)
In Section , we prove the strong convergence theorem for (.)-(.) without condi-tions (L), (L) and (.). An application to the case thatTiis aγi-strictly
pseudocontrac-tive mapping is given in Section .
2 Main results
We need the following lemmas for the proof of our main result.
Lemma .[]
(i) x+y≤ x+ y,x+y,∀x,y∈H.
(ii) ( –t)x+ty= ( –t)x+ty– ( –t)tx–y,∀x,y∈H,and for any fixed
t∈[, ].
From [], we have the following lemma.
Lemma . [] Tλx–Tλy ≤( –λτ)x–y,∀x,y∈H and for a fixed numberμ∈ (, η/L),λ∈(, ),whereτ= – –μ(η–μL)∈(, )and Tλx= (I–λμF)x for x∈H.
Lemma .[, ] Assume that T is a nonexpansive self-map of a closed convex subset K of a real Hilbert space H.If T has a fixed point,then I–T is demiclosed;that is,whenever
{xk}is a sequence in K weakly converging to some x∈K and the sequence{(I–T)xk}strongly
converges to some y,it follows that(I–T)x=y.
Lemma .[] Let{xk}and{zk}be bounded sequences in a Banach space E such that
xk+= ( –βk)xk+βkzk
for k≥,where{βk}is in[, ]such that
<lim inf
Assume that
lim sup
k→∞ zk+–zk–xk+–xk ≤.
Thenlimk→∞xk–zk= .
Lemma .[] Let{ak}be a sequence of nonnegative real numbers satisfying the condition
ak+≤( –bk)ak+bkck,
where{bk}and{ck}are sequences of real numbers such that
(i) bk∈[, ]and ∞
k=bk=∞;
(ii) lim supk→∞ck≤.
Thenlimk→∞ak= .
Now, we are in a position to prove the following main result.
Theorem . Let H be a real Hilbert space,and let F:H→H be an L-Lipschitz con-tinuous and η-strongly monotone mapping for some constants L,η> .Let{Ti}Ni= be N
nonexpansive self-maps of H such that
C=
N
i=
Fix(Ti)=∅.
Then the sequence{xk}defined by(.)-(.)converges strongly to the unique element p∗
in(.).
Proof First, we prove that{xk}is bounded. By Lemma ., we have, for anyp∈C, from
(.) that
yk–p=(I–λkμF)xk–p=(I–λkμF)xk– (I–λkμF)p–λkμF(p)
≤( –λkτ)xk–p+λkμF(p).
PutMp=max{x–p,μτF(p)}. Thenx–p ≤Mp. So, ifxk–p ≤Mp, theny
k–p ≤
Mp. This conclusion has a place for{yik}withi= , . . . ,N– . Indeed, yik–p= –βki(xk–p) +βki
Tiyik––Tip
≤ –βkixk–p+βkiyik––p
≤ –βkiMp+βkiMp
=Mp.
Then
xk+–p= –βkN
(xk–p) +βkN
Tiyik––Tip
≤ –βkiMp+βkiMp
=Mp.
Therefore, the sequence{xk}is bounded. So, the sequences{F(xk)},{yik}, and{Tiyik–}(i=
, , . . . ,N) are also bounded. Without loss of generality, we assume that they are bounded by a positive constantM.
Letzk=TNyNk–. Then we have from (.) that
xk+=
–βkNxk+βkNzk
and
zk+–zk=TNyNk+––TNykN–≤yNk+––yNk–
= –βkN+–xk++βkN+–TN–yNk+–
– –βkN–xk+βkN–TN–yNk–
≤ –βkN+–xk+–xk+ MβkN+––βkN–
+βkN+–TN–yNk+––TN–yNk–
≤ –βkN+–xk+–xk+ MβkN+––βkN–
+βkN+–yNk+––yNk–
≤ –βkN+–xk+–xk+ MβkN+––βkN–
+βkN+– –βkN+–xk+–xk+ MβkN+––βkN–
+βkN+–yNk+––yNk–
≤ –βkN+–βkN+–xk+–xk+ MβkN+––βkN–
+βkN+––βkN–+βkN+–βkN+–yNk+––yNk–
≤ · · ·
≤
–
N–
i=
βki+
xk+–xk+
N–
i=
βki+yk+–yk
+ M N–
i=
βki+–βki.
On the other hand,
yk+–yk=(I–λk+μF)xk+– (I–λkμF)xk
≤ xk+–xk+M(λk++λk).
So, we obtain that
zk+–zk–xk+–xk ≤M(λk++λk)
N–
i=
βki++ M N–
i=
Sinceλk→ andβki→βi,i= , . . . ,N– , we have
lim sup
k→∞
zk+–zk–xk+–xk ≤.
By Lemma .,xk–zk → ask→ ∞,i.e.,xk–TNyNk– →.
Now, we prove that xk –Tiyki– → for i = , . . . ,N – . First, we prove xk –
TN–yNk– →. Let{xkn}be a subsequence of{xk}such that
lim sup
k→∞
xk–TN–yNk–=nlim→∞xkn–TN–yNkn–
and let{xkj}be a subsequence of{xkn}such that
lim sup
n→∞ xkn–p=jlim→∞xkj–p.
Further,
xkj–p ≤xkj–TNy
N–
kj +TNy N– kj –TNp
≤xkj–TNy
N– kj +y
N– kj –p
≤xkj–TNy
N– kj +
–βkN–xkj–p
+βkN–
j TN–y N–
kj –TN–p
≤xkj–TNy
N– kj +
–βkN–xkj–p+β N– kj y
N– kj –p
≤xkj–TNy
N– kj +
–βkN–xkj–p
+βkNj– –βkN–xkj–p+β N– kj TN–y
N–
kj –TN–p
≤xkj–TNy
N– kj +
–βkN–βkN–
j
xkj–p
+βkNj–βkNj–yNkj––p
≤ · · ·
≤xkj–TNy
N– kj +
–
N–
i=
βkij
xkj–p+
N–
i=
βkijykj–p.
Since
ykj–p≤( –λkjτ)xkj–p+λkjμF(p),
we have
xkj–p ≤xkj–TNy
N– kj +y
N– kj –p
≤xkj–TNy
N–
kj +xkj–p+ N–
i=
βki
Therefore,
lim
j→∞xkj–p=jlim→∞ yN–
kj –p. (.)
Next, by Lemma . we have
yNkj––p= –βkN–
j
xkj–p
+βN– kj TN–y
N– kj –p
– –βkN–
j
βkN–
j xkj–TN–y N– kj
≤ –βkNj–xkj–p
+βN– kj y
N– kj –p
– –βkN–
j
βkN–
j xkj–TN–y N– kj
≤ –βkNj–xkj–p
+βkN–
j –β N– kj
(xkj–p) +β N– kj
TN–yNkj––p
– –βkN–
j
βkN–
j xkj–TN–y N– kj
≤ –βkN–
j β N– kj
xkj–p
+βN– kj β
N– kj y
N– kj –p
– –βkN–
j
βkN–
j xkj–TN–y N– kj ≤ · · · ≤ – N– i=
βki
j
xkj–p
+ N–
i=
βki
jy kj–p
– –βkN–
j
βkN–
j xkj–TN–y N– kj
.
On the other hand, by Lemma . we get
yk–p=(I–λkμF)xk–p
=xk–p– (I–λkμF)xk
≤ xk–p– λkμ
F(xk),xk–p
≤ xk–p+ λkμMMp.
Without loss of generality, assume that α≤βki ≤β,k≥ fori= , . . . ,N– and some α,β∈(, ). Then we obtain that
α( –β)xkj–TN–y N– kj
≤ xkj–p
–yN– kj –p
+ λkjμMMp N–
i=
βkij,
which with λk→ and (.) implies thatxkj –TN–y N–
kj → as j→ ∞. So,xk–
TN–yNk– → ask→ ∞.
Similarly, we obtain thatxk–TN–yNk– →, . . . ,xk–Tyk → ask→ ∞.
Further, we prove thatxk–Tixk → ask→ ∞fori= , . . . ,N. First, note thatyk–
Tiyik– → becausexk–Tiyik– →, fori= , . . . ,N. Now, from
xk–Tixk ≤xk–Tiyki–+Tiyik––Tixk
≤xk–Tiyik–+yik––xk
andxk–Tiyki–,yik––xk →, it follows thatxk–Tixk → fori= , . . . ,N.
Further, we have
lim sup
k→∞
Fp∗,p∗–xk
≤. (.)
Indeed, let{xkj}be a subsequence of{xk}that converges weakly top˜such that
lim sup
k→∞
Fp∗,p∗–xk
=lim
j→∞
Fp∗,p∗–xkj
.
Thenxkj–Tixkj →. So, by Lemma .,p˜∈C. Therefore, from (.) it implies (.).
Finally, we estimate the value
xk+–p∗
≤ –βkNxk–p∗
+βkNTNykN––TNp∗
≤ –βkNxk–p∗
+βkNyNk––TNp∗
≤ –βkNxk–p∗
+βkN –βkN–xk–p∗+βkN–TN–ykN––TN–p∗
≤ –βkNβkN–xk–p∗+βkNβkN–ykN––TNp∗
≤ –βkNβkN–xk–p∗
+βkNβkN– –βkN–xk–p∗
+βkN–TN–ykN––TN–p∗ ≤ · · · ≤ – N i=
βki
xk–p∗
+
N
i=
βkiyk–p∗.
On the other hand, since
yk–p∗=(I–λkμF)xk–p∗
=(I–λkμF)
xk–p∗
–λkμF
p∗
≤( –λkτ)xk–p∗– λkμ
F(xk),yk–p∗
,
we have
xk+–p∗ ≤ – N i=
βki
xk–p∗
+
N
i=
βki( –λkτ)xk–p∗
+λkμ
Fp∗,p∗–xk
+ λkμ
Fp∗,xk–yk N
i=
≤
–λkτ N
i=
βki
xk–p∗
+λkτ N
i=
βki
μ τ
Fp∗,p∗–xk
+μ τ
Fp∗,xk–yk
.
Using Lemma . with
ak=xk–p∗,
bk=λkτ N
i=
βki,
ck=
μ τ
Fp∗,p∗–xk
+μ τ
Fp∗,xk–yk
,
xk–yk → and (.), we have thatxk–p∗ →. This completes the proof.
3 Application
Recall that a mappingS:H→His calledγ-strictly pseudocontractive if there exists a constantγ ∈[, ) such that
Sx–Sy≤ x–y+γ(I–S)x– (I–S)y, ∀x,y∈H.
It is well known [] that a mappingT:H→HbyTx=αx+ ( –α)Sxwith a fixedα∈[γ, ) for allx∈His a nonexpansive mapping andFix(T) =Fix(S).
Using this fact, we can extend our result to the case C=Ni=Fix(Si), where Si is
γi-strictly pseudocontractive as follows.
Letαi∈[γi, ) be fixed numbers. ThenC= N
i=Fix(T˜i) with
˜
Tiy=αiy+ ( –αi)Siy, (.)
a nonexpansive mapping, for eachi= , . . . ,N. So, we have the following result.
Theorem . Let H be a real Hilbert space,and let F:H→H be an L-Lipschitzian and
η-strongly monotone mapping for some constants L,η> .Let{Si}Ni=be Nγi-strictly
pseu-docontractive self-maps of H such that
C=
N
i=
Fix(Si)=∅.
Letαi∈[γi, ),μ∈(, η/L).Assume that{λk},{βki} ⊂(, )satisfy(.).Then the
se-quence{xk}defined by(.)with Tireplaced byT˜iof(.)converges strongly to the unique
element p∗of(.).
4 Numerical example
Consider the following optimization problem: find an element
p∗∈C:ϕp∗=min
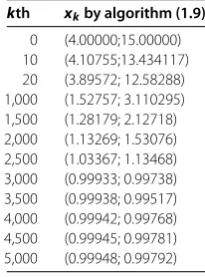
Table 1 Iterations of scheme (1.9), where starting pointx0= (4; 15)
kth xkby algorithm (1.9)
0 (4.00000;15.00000) 10 (4.10755;13.434117) 20 (3.89572; 12.58288) 1,000 (1.52757; 3.110295) 1,500 (1.28179; 2.12718) 2,000 (1.13269; 1.53076) 2,500 (1.03367; 1.13468) 3,000 (0.99933; 0.99738) 3,500 (0.99938; 0.99517) 4,000 (0.99942; 0.99768) 4,500 (0.99945; 0.99781) 5,000 (0.99948; 0.99792)
whereϕ(x) =x/,x= (x,x)∈E, Euclid space, andC=C∩C, defined by
C=
(x,x)∈E:x– x+ ≤
,
C=
(x,x)∈E: x–x– ≥
.
Clearly, the above problem possesses a unique solution p∗ = (; ) and F, the Fréchet derivative ofϕ, is -Lipschitz continuous and (/)-strongly monotone. Starting with the pointx= (x
;x) = (; ),μ= /∈(; η/L) andλk= (k+ )/, we obtained the result
in Table .
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The main idea of this paper was proposed by JKK. JKK and NB prepared the manuscript initially and performed all the steps of proof in this research. All authors read and approved the final manuscript.
Author details
1Department of Mathematics Education, Kyungnam University, Changwon, 631-701, Korea.2Vietnamese Academy of Science and Technology, Institute of Information Technology, 18, Hoang Quoc Viet, Cau Giay, Hanoi, Vietnam.
Acknowledgements
This work was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology (2012R1A1A2042138).
Received: 8 April 2013 Accepted: 18 August 2013 Published: 3 September 2013 References
1. Kinderlehrer, D, Stampacchia, G: An Introduction to Variational Inequalities and Their Applications. Academic Press, New York (1980)
2. Glowinski, R: Numerical Methods for Nonlinear Variational Problems. Springer, New York (1984) 3. Zeidler, E: Nonlinear Functional Analysis and Its Applications. Springer, New York (1985)
4. Yamada, Y: The hybrid steepest-descent method for variational inequalities problems over the intersection of the fixed point sets of nonexpansive mappings. In: Butnariu, D, Censor, Y, Reich, S (eds.) Inherently Parallel Algorithms in Feasibility and Optimization and Their Applications, pp. 473-504. North-Holland, Amsterdam (2001)
5. Zeng, LC, Yao, JC: Implicit iteration scheme with perturbed mapping for common fixed points of a finite family of nonexpansive mappings. Nonlinear Anal. TMA64, 2507-2515 (2006)
6. Xu, HK: An iterative approach to quadratic optimization. J. Optim. Theory Appl.116, 659-678 (2003)
7. Zeng, LC, Wong, NC, Yao, JC: Convergence analysis of modified hybrid steepest-descent methods with variable parameters for variational inequalities. J. Optim. Theory Appl.132, 51-69 (2007)
8. Liu, X, Cui, Y: The common minimal-norm fixed point of a finite family of nonexpansive mappings. Nonlinear Anal. TMA73, 76-83 (2010)
9. Marino, G, Xu, HK: Weak and strong convergence theorems for strict pseudo-contractions in Hilbert spaces. J. Math. Anal. Appl.329, 336-346 (2007)
11. Li, G, Kim, JK: Demiclosedness principle and asymptotic behavior for nonexpansive mappings in metric spaces. Appl. Math. Lett.14(5), 645-649 (2001)
12. Suzuki, T: Strong convergence of approximated sequences for nonexpansive mappings in Banach spaces. Proc. Am. Math. Soc.135, 99-106 (2007)
doi:10.1186/1029-242X-2013-419