Abstract
LOWNDES, ERIK MCKENZIE. Development of an Intermediate DOF Vehicle
Dynamics Model for Optimal Design Studies. (Under the direction of Dr. Joseph W.
David)
The demands imposed by the optimal design process form a unique set of criteria
for the development of a computational model for vehicle simulation. Due to the large
number of simulations that must be performed to obtain an optimized design the model
must be computationally efficient. A competing criterion is that the computational model
must realistically model the vehicle.
Current trends in vehicle simulation codes have tackled the problem of realism by
constructing elaborate full vehicle models containing dozens if not hundreds of distinct
bodies. Each body in a model of this type is associated with six degrees of freedom.
Numerous constraint equations are applied to the bodies to represent the physical
connections. While the formulation of the equations is not particularly difficult, and in fact
has been automated in several software packages, the resulting model requires a
considerable amount of computational time to run. This makes the model unsuitable for
the application of computational optimal design techniques.
demands of the optimal design process. These models typically use less than a dozen
degrees of freedom to model the vehicle. They do a good job of predicting the general
motion of the vehicle and they are useful as design tools but they lack the accuracy
required for optimal design.
A model that bridges the gap between these two existing classes of models and is
suitable for performing optimal design was developed. The model possesses twenty-eight
degrees of freedom and consists of eight bodies which represent the sprung mass, the rear
suspension, the left front spindle, the right front spindle, and the four wheels. A driver
control algorithm was developed which is capable of driving the car near its handling
limits. The NCSU Legends race car was modeled and an attempt was made to optimize
Development of an Intermediate DOF Vehicle
Dynamics Model for Optimal Design Studies
by
Erik M. Lowndes
A thesis submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Department of Mechanical and Aerospace Engineering
Raleigh
1998
Biography
The author was born in Boulder, Colorado on March 21, 1968. He graduated first
from Oak Ridge High School, Oak Ridge, TN in 1986. He attended the University of
Illinois at Urbana-Champaign in 1986 as a Chancellor’s Scholar in the Campus Honor’s
Program. In January of 1990 he received his Bachelor of Science in Engineering Physics.
He continued his studies at the University of Illinois, receiving a Master of Science in
Physics in May of 1991. The author was married on June 23, 1991.
In the Summer of 1992 the author entered the Ph.D. program in the Department of
Mechanical Engineering at North Carolina State University, Raleigh, North Carolina. In
Acknowledgments
The author wishes to express his sincere appreciation to the chairman of his
advisory committee, Dr. Joseph W. David, for his patience, encouragement, advise and
support throughout this research. The author is also grateful to Dr. C. Tim Kelley, Dr.
Larry M. Silverberg and Dr. John S. Strenkowski for serving on the advisory committee.
Many thanks are also due to Dave Lewandowski and Mark Strohmeyer for their
support, encouragement, and ideas. Additional thanks are due to Mark Etheridge and
Jarno Kilian, who, in addition to their encouragement and valued input, loaned their
personal computers to the author for use as part of the PVM parallel processing network
used to generate the results in this thesis.
Finally, the author would like to express his gratitude to his family, and especially
to his wife Celeste and his son Mason, for their patient understanding, sacrifice and
Table of Contents
List of Tables viii
List of Figures x
1 Introduction 1
1.1 Motivation for the Study ... 1
1.2 Historical Background... 3
Vehicle Modeling ... 6
Driver Modeling ... 29
Model Parameter Measurement ... 39
Direct Measurement ... 40
Parameter Identification ... 41
1.3 Derivation Methodology and Overview of the Thesis... 43
2 Equations of Motion - Sprung Mass 47 2.1 Introduction ... 47
2.2 Sprung Mass Kinetic and Potential Energy Terms... 48
2.3 Euler Parameter Constraints ... 54
3 Equations of Motion - Front Suspension and Wheels 56 3.1 Introduction ... 56
3.2 Front Spindle Kinetic and Potential Energy Terms ... 59
3.3 Front Wheel and Tire Rotational Energy Terms ... 60
3.4 Generalized Forces for Springs and Dampers... 62
3.5 Constraint Forces for the Control Arms ... 69
4 Equations of Motion - Three Link Rear Suspension 77
4.1 Introduction ... 77
4.2 Unsprung Mass Kinetic and Potential Energy Terms... 77
4.3 Rear Wheel Rotational Energy Terms ... 79
4.4 Rear Springs and Dampers ... 82
4.5 Panhard Rod and Trailing Link Constraints... 84
4.6 Summary of Results... 86
5 Equations of Motion - Steering System 89 5.1 Introduction ... 89
5.2 Rack and Pinion ... 89
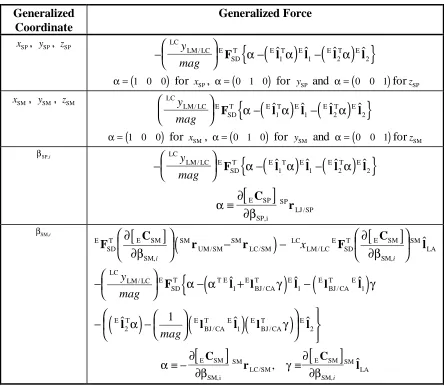
5.3 Four Bar Linkage ... 90
5.4 Tie Rod Constraints... 96
6 Road Model 99 6.1 Introduction ... 99
6.2 Road Surface Coordinate System ... 100
6.3 Location of the Tire to Road Contact Point ... 102
6.4 Velocity of the Tire to Road Contact Point... 108
6.5 Vehicle Position and Heading Angle ... 110
6.6 Road Segment Models... 112
Linear Polynomial Road Segment ... 113
Quadratic Polynomial Road Segment... 114
Cubic Polynomial Road Segment ... 115
7 Equations of Motion - Tire Model 117 7.1 Introduction ... 117
7.2 Coordinate Systems... 117
7.3 The Magic Formula Tire Model... 119
Support Forces... 120
Tractive Forces ... 121
Lateral Slip and Longitudinal Slip ... 122
Magic Formula ... 125
7.4 Generalized Force and Moments... 127
Front Tires ... 127
8 Equations of Motion - Driver Model 131
8.1 Introduction ... 131
8.2 Steering Control ... 132
Driver Path Definition ... 133
Steering Profile Optimization and Cost Function Computation... 134
8.3 Speed Control ... 138
Driver Dynamics Block ... 140
Vehicle Dynamics Block... 143
Preview Compensation Block ... 144
9 Results, Conclusions and Recommendations 150 9.1 Introduction ... 150
9.2 Measurement Process and Model Data ... 150
Vehicle Data... 151
Tire Data... 156
Track Data ... 160
Driver Model Data ... 161
9.3 Model Chassis Setup ... 162
9.4 Simulation Results... 165
Optimizer and Cost Function Computation Setup ... 165
Optimal Steering Profile Configuration ... 167
Optimal Velocity Profile Setup ... 168
Speed Control Algorithm Performance ... 170
Steering Control Performance... 174
9.5 Vehicle Optimization Results... 177
9.6 Recommendations for Future Research... 179
Bibliography 183 Appendix A - Useful Derivatives 190 Angular Velocity Derivatives ... 190
Transformation Matrix Derivatives... 192
Appendix B - Wheel Inertia Estimate 196 Thin Cylindrical Disk ... 196
Thin Walled Cylindrical Shell ... 197
Rotating Assembly Model ... 198
Appendix C - Tire Data 199 BFGoodrich Letter... 199
List of Tables
1.1 Vehicle Model Degrees of Freedom ... 2
1.2 Computational Degrees of Freedom ... 3
1.3 Identification of the Sub-Terms in the Equations of Motion... 45
1.4 Organization of the Vehicle Model Derivations ... 46
3.1 Front Suspension Kinetic and Potential Energy Terms... 73
3.2 Wheel and Tire Rotational Energy Terms... 73
3.3 Generalized Forces due to Spring or Damper ... 74
3.4 Generalized Forces due to the Control Arm Length Constraint... 75
3.5 Generalized Forces due to the Control Arm Orthogonality Constraint ... 76
4.1 Kinetic and Potential Energy Terms for the Motion of the Rear Suspension ... 86
4.2 Kinetic Energy Terms for the Rotation of the Rear Wheels and Tires ... 87
4.3 Generalized Forces Associated with a Rear Spring or Damper ... 87
4.4 Constraint Forces Associated with the Panhard Rod... 88
7.1 Desired Longitudinal Force Sign and Sign of the Longitudinal Slip... 124
9.1 NCSU Legends Car - Front Suspension Geometric Data... 151
9.2 NCSU Legends Car - Rear Suspension Geometric Data, Spring Data and Damper Data ... 152
9.3 NCSU Legends Car - Sprung Mass Geometric Data ... 153
9.4 NCSU Legends Car - Model Mass and Inertia Properties ... 154
9.6 Miscellaneous Tire Model Parameters: Geometric Data, Slip Equation
Parameters and Normal Force Characteristics ... 157
9.7 Delft ’97 Tire Model Parameters: Pure Longitudinal Slip Equation ... 158
9.8 Delft ’97 Tire Model Parameters: Pure Lateral Slip Equation ... 159
9.9 Delft ’97 Tire Model Parameters: Combined Slip Equations... 160
9.10 Driver Model Parameters ... 163
9.11 Vehicle Setup Parameters ... 164
9.12 Optimization and Cost Function Computation Parameters... 165
9.13 Vehicle Suspension Parameter Optimization Ranges ... 177
List of Figures
2.1 Earth Fixed and Vehicle Sprung Mass Coordinate Systems ... 48
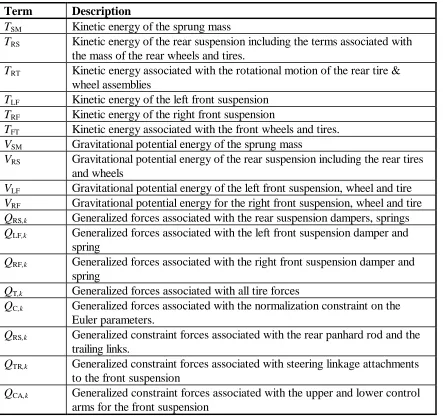
3.1 Schematic Showing Front of Sprung Mass and Control Arms ... 57
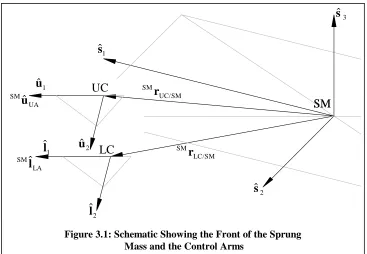
3.2 Schematic of Spindle and Control Arms ... 58
3.3 Schematic of a Generic Control Arm... 70
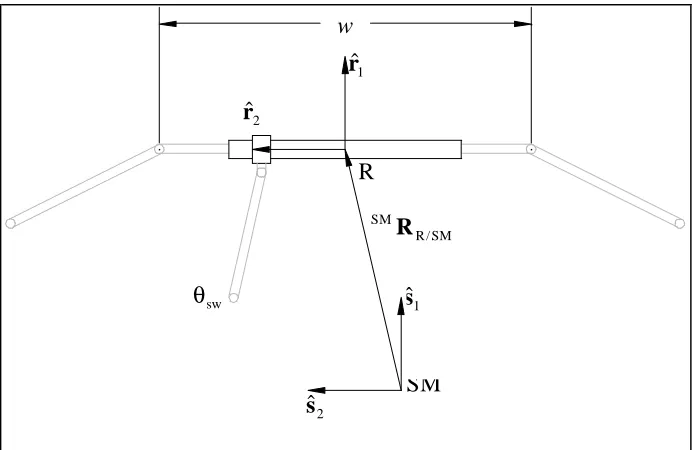
5.1 Schematic of the Rack and Pinion Steering System ... 90
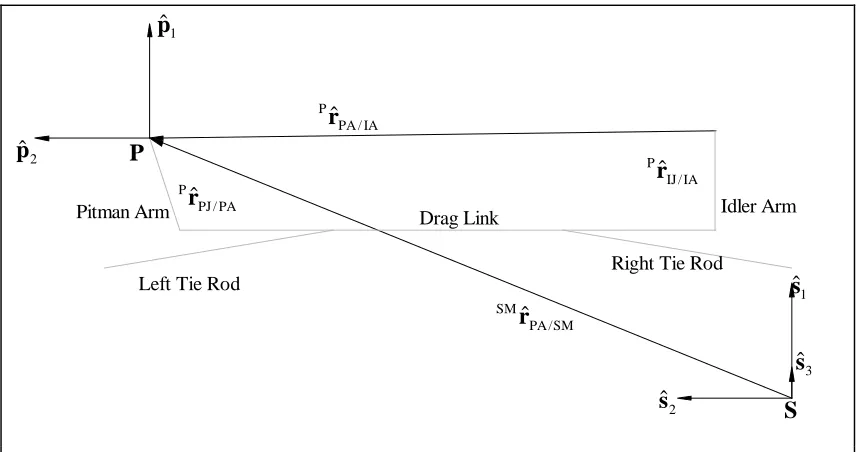
5.2 Relationship between the P and S Coordinate Systems ... 91
5.3 Relationship between the D and P Coordinate Systems ... 92
5.4 Schematic of the Four Bar Linkage Steering System ... 94
7.1 The Tire Model Coordinate System ... 118
7.2 Relationship between Tire Velocity Components... 123
8.1 Driver Path for the Kenley, NC Race Track ... 133
8.2 Steering Profile for the Kenley, NC Race Track ... 135
8.3 Driver Speed Controller Block Diagram... 139
8.4 Effect of the Traction Control Gain Parameter on the Acceleration ... 143
9.1 Schematic of the Kenley, NC Race Track... 161
9.2 Optimized Steering Profile for the Kenley, NC Simulation... 168
9.3 Optimized Velocity Profile for the Kenley, NC Simulation ... 169
9.4 Comparison of the Prescribed Velocity and the Actual Vehicle Velocity... 170
9.5 Vertical Acceleration of the Sprung Mass (Sprung Mass Coordinate System)... 171
9.6 Longitudinal Wheel Slip Percentages ... 172
9.7 Vehicle Position and 9.0 Seconds (Exiting Turn 2)... 173
9.8 Tire Normal Loads... 174
9.9 Vehicle Lateral Position Error... 175
9.10 Yaw Velocity... 176
1 Introduction
1.1 Motivation for the Study
The demands imposed by the optimal design process form a unique set of criteria
for the development of a computational model for vehicle simulation. Due to the large
number of simulations which must be performed to obtain an optimized design the model
must be computationally efficient. For a fixed execution time a faster simulation will, in
general, lead to a better design. A competing criteria is that the computational model
must realistically model the vehicle.
Current trends in vehicle simulation codes have tackled the problem of realism by
constructing elaborate full vehicle models containing dozens if not hundreds of distinct
bodies. Each body in a model of this type is associated with six degrees of freedom.
Numerous constraint equations are applied to the bodies to represent the physical
connections.1 While the formulation of the equations is not particularly difficult, and in fact has been automated in several software packages, the resulting model requires a
considerable amount of computational time to run. This makes the model unsuitable for
the application of computational optimal design techniques.
1
Past research in the field of vehicle dynamics has produced numerous
computational models which are small enough and fast enough to satisfy the speed
demands of the optimal design process. These models typically use less than a dozen
degrees of freedom to model the vehicle. They do a good job of predicting the general
motion of the vehicle and they are useful as design tools but they lack the required
accuracy for optimal design.
A model which bridges the gap between these two existing classes of models is
required for optimal design. This type of model combines element of both approaches to
obtain an accurate solution and yet still emphasize computational efficiency. This is the
type of model which is developed in this thesis. The model consists of eight bodies which
represent the sprung mass, the rear suspension, the left front spindle, the right front
spindle, and the four wheels. There are a total of twenty-eight dynamical degrees of
freedom which are distributed as shown in Table 1.1.
The total number of computational degrees of freedom is summarized in the Table
1.2. The equations of motion are second order which means that for each dynamical
degree of freedom there are two computational degrees of freedom (obtained in
Table 1.1 - Vehicle Model Degrees of Freedom
Body Degrees of
Freedom
Constraint Equations
Constraint Type
sprung mass 7 1 Euler Parameter normalization
rear suspension 7 5 EP norm, panhard rod, trailing links
front right suspension 7 5 EP norm, upper (2) and lower (2)
control arms
front left suspension 7 5 EP norm, upper (2) and lower (2)
control arms
converting the second order differential equations to pairs of first order differential
equations). The constraint equations introduce additional degrees of freedom in the form
of Lagrange multipliers which are necessary for determining the constraint forces. There
are a total of 80 computational degrees of freedom.
1.2 Historical Background
2The study of automobile stability and control is a relatively new field. Although
significant quantities of automobiles were being produced in the early 1900s few efforts
were made to quantify the handling issues. Much of the early development was done on a
“cut and try” basis and this methodology is reflected in the literature. The majority of the
effort prior to 1925 was expended in designing suspensions which would keep the tires in
contact with the ground as much as possible in order to enable more effective steering
control. This preoccupation with controllability is typical of the early work. Progress in
the area of automotive stability was not seen until the 1930s.
2
Much of the historical information prior to the mid 1950s is from the following references: [ Segel, 1956a], [Milliken, 1956], [ Segel, 1956b] and [Whitcomb, 1956].
Table 1.2 - Computational Degrees of Freedom
Body Dynamical
Degrees of Freedom
Constraint Equations
Computational Degrees of
Freedom
sprung mass 7 1 15
rear suspension 7 5 19
front right suspension 7 5 19
front left suspension 7 5 19
wheels 4 none 8
In 1903 the Wright brothers successfully built their first airplane. In the same year
G. H. Bryan started his pioneering work on a mathematical theory of airplane stability
which was a few years later [Bryan, 1911]. While the refinement of Bryan’s stability
theory progressed steadily similar theories for the automobile didn’t appear until much
later. This delay was most likely due to the less pressing need to consider stability in
ground vehicles as compared to aircraft. The development of usable aircraft hinges on an
understanding of aerodynamics and how it affects the stability of an aircraft. This
understanding had been evolving with the use of scale models and wind tunnels. The slow
development of an automotive stability theory was also the result of a lack of
understanding of the role of the tire mechanics in the stability of an automobile.
The emphasis on vehicle control between 1900 and 1930 led to kinematic studies
of suspension and steering geometries. These studies led to improved designs including
Akermann steering geometry. Much of the remaining development work was concerned
with the drivetrain, structure and performance of the automobile with one notable
exception: A general theory of ride dynamics (the motion of the automobile in its plane of
symmetry) was well established by 1925. However, very little, if any, progress had been
made in the areas of static and dynamic directional stability. This statement may seem a
little strange at first given that the equations for ride dynamics are similar to those
involved in a full stability analysis. The key difference lies in the need to understand the
mechanism of lateral force generation by the tire. Without this knowledge it is impossible
In 1925 Broulheit published a paper in which the basic concepts of side-slip and
slip angle were recognized for the first time [Broulheit, 1925]. The recognition of these
concepts came about during attempts to explain the phenomenon of steering shimmy
which plagued vehicles of the time period. In 1931 Becker, Fromm, and Maruhn published
a text on the role of the tire in steering system vibrations and further developed the field of
tire mechanics [Becker, 1931]. This realization enabled further study of the problem of
automotive stability.
During the 1930s the Cadillac Suspension Group of General Motors, under the
direction of Maurice Olley, developed the first independent front suspension used on an
American car. It was found that certain steering geometries led to a condition which the
group termed oversteer [Olley, 1937]. It was recognized that these geometries led to
vehicles which were unsafe at high speeds. Olley’s oversteer is recognized today as being
roll oversteer. Further investigation revealed that behavior similar to oversteer could be
induced by over loading or under inflating the rear tires. In 1934 Olley wrote an
unpublished report containing his findings and in which the proposition of oversteer /
understeer was stated and the idea of critical speed was first mentioned [Olley, 1934]. As
a result of this research Goodyear Tire and Rubber Company began rolling drum tests to
determine tire characteristics and in 1935 R. D. Evans published the results in a paper on
lateral tire characteristics [Evans, 1935]. This paper gave data on cornering force and
self-aligning torque.
This work precipitated a period of extensive research at General Motors. The
exploration of steady-state tire characteristics occurred and skidpad tests were used for
the first time. A fundamental understanding of the steady state tire characteristics was
developed and a qualitative understanding of the transient behavior was obtained. During
the period from 1939 to 1945 very little progress was made due to World War II.
In 1950 Lind Walker summarized the current state of knowledge on the issue of
directional stability and introduced the concept of the ‘neutral steer line’ and the ‘stability
margin’ [Walker, 1950]. These concepts had already been established in aeronautical
circles and were suggested as criteria for steady state directional stability in automobiles.
The concept of using aerodynamics and tire characteristics to aid in achieving stability was
also proposed.
Vehicle Modeling
By the middle of the 1950s the groundwork for a mathematical model of the
vehicle had been laid. A basic understanding of the tire enabled the creation of reasonably
accurate mathematical tire models.
In 1956 William F. Milliken, David W. Whitcomb, and Leonard Segel of the
Cornell Aeronautical Laboratory, published the first major quantitative and theoretical
analysis of vehicle handling in a series of papers [Segel, 1956a][Milliken, 1956][Segel,
1956b][Whitcomb, 1956]. These papers formed the basis for research in the area of
automotive stability and control for the next three decades and are still frequently
Milliken’s paper [Milliken, 1956] provides a historical overview of the field from which
much of the above material was taken. In summarizing the progress made to date, Milliken
made the following statement,
Thus, [the] major effort in handling research to date has been in the recognition of individual effects, their isolation, and examination as separate entities. This work naturally started out as qualitative and in some instances has become quantitative. It has been conceptual in character; it has been pioneering and not infrequently intuitive and inspired, but it can hardly be viewed as an end in itself. Rather, it is a substantial beginning. All the individual effects now known need quantitative analytical expression. More significant, however, is the need for comprehensive, integrated analysis methods, for such overall theories will enable the prediction of the actual motion by rationally and simultaneously taking into account all of the separate effects.
Milliken also noted that, although a great deal of progress had been made in
understanding the tire, there was much to be done still. Although much has been learned
about tire modeling Milliken’s observation is still true today; dynamic data on tires is only
now becoming available. There were no universally accepted set of reference axes and
measured tire data of the period were typically confined to two or three of the possible six
force/moments. This made translation of the data from one set of axes to another difficult
if not impossible. It was also recognized that the effects of tire design on handling were
largely unknown and that there existed a need to perform testing on a wide variety of
common passenger car tires to determine the effects of the various design parameters. In
discussing of the future objectives of the Cornell Aeronautics Lab research program
control’. In the process he made the following distinctions between stability and control,
performance and ride.
In general, an automobile has ‘six-degrees-of-motion’ freedom, and stability and control may be thought of as those lateral motions out of the plane of symmetry involving rolling, yawing and sideslipping. (‘Performance’, by way of distinction, is concerned with fore-and-aft motions in the plane of symmetry, such as acceleration, speed, and braking, while ‘ride’ is composed of the vertical and pitching motions in the plane of symmetry.)
The second paper of the series, written by Leonard Segel, derives a set of
nondimensionalized linearized three degree of freedom equations for lateral and directional
motion [Segel, 1956b]. In accordance with the research goals outlined by Milliken the
emphasis of the model was put on modeling for analysis of stability and control. The
bounce and pitch degrees of freedom of the chassis were ignored and a fixed longitudinal
roll axis parallel to the ground was used. Segel also made several other simplifying
assumptions including constant forward velocity, fixed driving thrust divided equally
between the rear wheels, and that the lateral mechanical properties of the tires are
decoupled from the longitudinal mechanical properties at the speeds studied. The
unsprung mass was modeled as a single non-rolling lumped mass.
An experimental validation of the model was performed using a 1953 Buick Super
four-door sedan. The vehicle was put through both pulse steering input and step steering input
tests and the transient response for the three degrees of freedom included in the model
(lateral displacement, yaw and roll) were measured at a variety of constant forward
taken at 32 mph in a series of frequency response curves with the results showing good
correlation.
The final paper in the series, written by D. W. Whitcomb, draws a series of conclusions on
automobile stability and control using a two degree of freedom model (yaw and side-slip)
with experimentally determined parameters [Whitcomb, 1956]. Due to the lack of a roll
degree of freedom, Whitcomb was able to assume that the car has no width and that the
tires lay on the centerline of the vehicle (a “bicycle model”). A set of linearized differential
equations is derived using stability derivatives and the steady state and transient responses
are studied. In studying the yaw response of the vehicle at a constant vehicle side-slip
angle (same angle for both tires) he introduces the concept of the “static margin”.
The static margin is an indication of the sense and amplitude of the yawing moment associated with the total tyre side force. It immediately determines the yawing moment that the tyres would provide in reacting an externally applied side force.
In his summary of response characteristics Whitcomb recognizes the strong
influence of the static margin on vehicle stability. For vehicle with a negative static margin
it was recognized that a critical speed existed, which if exceeded, would lead to instability.
As noted by Milliken, there existed a need to quantify and refine the current knowledge of
the individual vehicle subsystems. Additionally, he recognized the need to combine these
refined models into improved full vehicle models. Progress towards achieving these goals
In 1960 H. S. Radt and W. G. Milliken Jr. explored the motions of a skidding
automobile [Radt, 1960a][Radt, 1960b]. They used a relatively simple vehicle model with
yaw and lateral velocity as the only degrees of freedom. A tire model was incorporated
which included the effect of saturation of the side force in the presence of braking and
thrust forces via the concept of a friction circle. Results were presented for a series of
steady state and transient maneuvers on a low friction surface (µ=0.3). A simple driver
control was also implemented to study skid recovery. The driver model was based on
feedback from heading angle with a first order lag. Results are presented for several gains
and lag time constants.
In August of 1961 Martin Goland and Frederick Jindra published a paper which
they used a two degree of freedom (yaw and sideslip) vehicle model to study the
directional stability and control of a four wheeled vehicle [Goland, 1961]. The model is a
simplified version of Segel’s model with the main difference being that the roll degree of
freedom enters as a quasi-coordinate which is only used to calculate the vertical load on
the tires. The paper takes into account the effects of load transfer and the variation of the
cornering performance of the tires with vertical loading. Results are presented which show
how the stability of a vehicle changes as the center of mass is moved, the tire inflation
pressure is changed, and the tire tread width is changed. The effect of tread width and
inflation pressure on the tire properties is given by a simplified form of the semi-empirical
equations published by R.F. Smiley and W. B. Horne in the late 1950s [Smiley, 1958].
Walter Bergman published a paper in 1965 in which he explored the nature of
established for steady state maneuvers, they were not well established for the transient
case. Bergman discussed the many origins of understeer and oversteer behavior including
steering inputs, aerodynamic forces and inertia forces in the transient case. He noted that
understeer and oversteer could be recognized by considering the change in the yaw
velocity induced by a change in lateral acceleration. This definition is in accordance with
the standardized definitions of oversteer and understeer put forth by the Society of
Automotive Engineers [S.A.E., 1965]. Bergman also develops a six degree of freedom
vehicle model to explore understeer and oversteer behavior as well as vehicle stability. The
model consists of a sprung mass and a single unsprung mass. The position of the unsprung
mass is given with respect to an inertial coordinate system by a two dimensional vector
and a yaw angle. The location of the sprung mass is given relative to the unsprung mass in
terms of four vertical wheel displacements. Both masses are assumed rigid which implies
that one of the vertical displacements is redundant.
In 1966 Segel published a paper in which the stability of a free control automobile
(i.e. a vehicle with torque input at the steering wheel as opposed to a steering angle input)
was studied [Segel, 1966]. He proposed a two degree of freedom quasi-linear (due to
Coulomb friction) model for the steering system. This steering model was added to his
three degree of freedom model which was discussed above. The model was validated by
comparing simulation output, performed on an analog computer, to experimental data. A
reasonably good correlation was demonstrated as long as the lateral acceleration of the
vibrational modes of the combined vehicle and steering model and to relate them to
vehicle design parameters.
In 1967 R. Thomas Bundorf of General Motors published a paper relating vehicle
design parameters to the characteristic speed and to understeer [Bundorf, 1967]. This
paper utilized the definitions of understeer and characteristic speed proposed by the SAE
publication Vehicle Dynamics Terminology [S.A.E., 1965]. Methods are proposed to predict understeer quality in vehicle designs and for measuring understeer in existing
vehicles. It is noted that the characteristic speed is an attribute associated with a linear
vehicle model. Bundorf argued that under most normal driving conditions, which he
characterized as having lateral accelerations below 1/3 g, a vehicle can be accurately
modeled by a linear model. This condition led to the construction of a large diameter skid
pad at GM for measuring the characteristic speed; it was not possible to reach high
enough vehicle speeds for accurate measurement of the characteristic speed on the
existing small diameter pad without exceeding the 1/3 g limit on lateral acceleration.
Bundorf derived an expression for predicting the characteristic speed of a vehicle given the
design parameters. The vehicle model used in his derivation was a bicycle model with
Ackermann (no slip) steering. The paper also contains a discussion, written by A. G.
Fonda, of Bundorf’s results with several significant contributions and suggestions.
D. H. Weir, C. P. Shortwell, and W. A. Johnson published a paper in 1968 which
they explored the role of vehicle dynamics on controllability [Weir, 1968]. Their results
were obtained using experimental data and simulation data obtained from a model which
and Segel’s earlier models. The model consisted of two unsprung masses representing the
front and rear suspension assemblies respectively and a single sprung mass representing
the body of the vehicle. The dynamics of the vehicle were described by a linearized set of
equations in four degrees of freedom (roll of the sprung mass about a fixed axis, lateral
velocity, yaw rate, and axial velocity). The three masses were assumed to posses the same
yaw rate, axial velocity and side slip velocity. Provisions were made for a stationary tilted
roll axis. In accordance with the inclusion of the axial velocity as a degree of freedom,
aerodynamic loads on the vehicle, longitudinal tire forces generated by braking and
acceleration and rolling resistance were considered. Dynamic data for a number of
automobiles made by U.S. manufacturers is also presented and, as an example, the transfer
functions for a typical 1960s sedan were calculated. It was noted that the yaw, lateral
velocity and roll modes have undamped natural frequencies of approximately 6 rad/sec at
60 mph. The yaw and lateral velocity modes are highly damped and the roll mode is lightly
damped. The roll mode damping ratio was found to be approximately 0.2 to 0.3 and it was
found to be largely decoupled from the yaw and lateral velocity modes. Increasing vehicle
speed tends to lower the vibrational frequencies and decreases damping which leads to a
destabilization of the vehicle.
By the early 1970s simulations of vehicle dynamics were becoming more complex
and realistic. This was primarily due to advances in computing technology. Prior to the
1970s most simulations were performed on analog computers. These machines were
capable of solving the vehicle dynamics problems in real time (since the differential
manner. Unfortunately it was very difficult to model nonlinear functions of more than one
variable on these machines. Since most tire models are nonlinear functions of more than
one variable the accuracy of the simulations was compromised by limitations in the
computing equipment. The advent of digital computers allowed researchers to create
models containing nonlinear functions. This allowed increased realism in the simulations,
however, the slow speed of the digital machines (typically 10 to 100 times slower than real
time) meant increased computing costs. In the early 1970s researchers designed simulation
codes which ran on hybrid computers which combined digital and analog computing
hardware [Murphy, 1970][Tiffany, 1970][Hickner, 1971]. The new computers made it
possible to run simulations at real time speeds and at the same time include nonlinearities
in the model. A number of papers on computing techniques and on models can be found in
the literature. A few of the more significant papers are discussed below.
In the early 1970s a vehicle dynamics simulation for a hybrid computer was created
by the research staff at the Bendix Corporation Research Laboratories [Tiffany, 1970].
The model was based on the ten degree of freedom model created by R. R. McHenry and
N. J. Deleys at the Cornell Aeronautics Laboratory for the Bureau of Public Roads
[McHenry, 1968]. The BPR-CAL model was improved by adding four spin coordinates
for the wheels and three coordinates for the steering system model. The original
BPR-CAL model had six coordinates for the sprung mass, one vertical coordinate for each front
wheel, and one vertical and one rotational coordinate for the rear axle. The steering
system model is based on Segel’s model [Segel, 1966]. At the time of publication the
model. The model was upgraded in 1971 to include a dynamically accurate model of a
four wheel anti-lock braking system [Hickner, 1971].
In 1973 T. Okada et al described in a paper a seven degree of freedom model for
vehicle simulation [Okada, 1973]. The model was used to simulate vehicle handling at the
first stage of vehicle design. Five of the degrees of freedom were used to model the
vehicle (roll, yaw, pitch, lift and lateral position). The remaining two degrees of freedom
were used to model the steering system in a manner similar to that proposed by Segel. The
vehicle was assumed to move with constant velocity. A tractive force was applied to
maintain constant vehicle speed and compensate for the six components of aerodynamic
forces which could be applied to the model. A roll axis which moves vertically in
accordance with the wheel travel was included. The effects of roll steer, axle steer, caster,
camber, toe-in, and so on were approximated by linear functions based on wheel travel,
steer angle etc. The simulation could be run in three different modes: straight-running
(with lateral “wind gust” disturbances), stationary circular motion (skid pad), and a slalom
mode (to predict critical speed). Gyroscopic effects of the wheels were only included in
the straight-running simulation mode where vehicle speeds are high. Steady-state motion
was assumed in the skid pad simulation which lead to simplification of the equations of
motion and an essentially algebraic system of equations for determining the maximum
lateral acceleration. For the slalom course simulation transients of the motion of the
vehicle were neglected and constant forward speed was assumed. The path followed was
assumed to be periodic with length 2*L where L was the distance between the cones.
speed at which a solution could no longer be obtained. Driver response time limitations
were considered as well as vehicle limitations in determining the critical speed.
In 1973 Frank H. Speckhart published a paper in which he presented a vehicle
model containing fourteen degrees of freedom [Speckhart, 1973]. Six degrees of freedom
were assigned to the sprung mass, four degrees of freedom were associated with the
suspension movement at the four corners of the vehicle, and four rotational degrees of
freedom were assigned to the wheels. He used a Lagrangian approach in deriving his
equations. Models were presented for several different suspension configurations. The
sprung mass was restricted to pivot about a specified roll axis. It is likely that this is done
because the suspension models were relatively simple (two dimensional in the case of the
front independent suspension) and did not provide a sufficiently accurate representation of
the kinematics involved.
As digital computers gradually displaced analog and hybrid machines, primarily as
a result of economic concerns, it became necessary to create vehicle dynamics models
which were completely digital. The combination of the cost of computer time and the
slower solution speed of the digital machines made it desirable to create computationally
efficient models.
In 1973 Bernard published a paper detailing several time saving methods used in
the digital vehicle simulation code created for the Highway Safety Research Institute
[Bernard, 1973]. He noted that the important sprung mass motions tended to be in the low
frequency range (below 2 Hz) and that the significant wheel hop motions tended to be
with a relatively large time step (0.005 sec) and obtain accurate results. Unfortunately the
cycling of brake torque (as in an anti-skid system) could cause rapidly changing spin
derivatives for the wheel degrees of freedom. The relatively high frequency motion
required a much smaller time step on the order of 0.0001 second. Bernard proposed an
approximate method for dealing with the spin degrees of freedom which allowed the use
of the larger time step. This improvement in combination with the use of a specially
modified predictor-corrector integration scheme which only updated the wheel-hop
derivatives during the corrector phase led to a speed improvement of a factor of five.
In early 1976 Frederick Jindra published an interim report for the NHTSA
describing a vehicle simulation model being created at John’s Hopkins University Applied
Physics Laboratory [Jindra, 1976]. The model was called the Hybrid Computer Vehicle
Handling Program (or HVHP) because it was run on a hybrid computer. The HVHP
model was derived from a refined version of the Bendix Research Laboratories (BRL)
model which was discussed above. The HVHP model was used extensively by Calspan in
their study on the influence of tire properties on passenger vehicle handling. The HVHP
model contained seventeen degrees of freedom distributed as follows: six for the sprung
mass, one for the vertical motion of each front wheel, two for the vertical motion and
rotational motion of the rear axle assembly, three for the steering system, and four
rotational degrees of freedom for the wheels. The program had an option to use an
independent rear suspension model. In this case the model contained two degrees of
freedom for the vertical displacements of the rear wheels. The steering system model was
front wheels about their steering pivots and one degree of freedom for the translational
motion of the connecting steering rod and associated mass elements. Friction and
compliance in the steering mechanism were included. The rear unsprung mass was
assumed to pivot about a point which was constrained to move along the sprung mass
vertical axis. This constraint was an improvement over the traditional fixed pivot point and
fixed roll axis. No pivot point was assumed for the independent front suspension; the front
wheels were assumed to move vertically with respect to the sprung mass. Due to the
difficulty in representing nonlinear functions on the hybrid machine, piecewise linear
functions were used to describe the spring force, coulomb friction, damping coefficients,
roll stiffness, etc. The camber angle, caster angle, and toe angle were specified as
functions of the suspension deflection. Compliance coefficients were used to model the
change in camber angle and steer angle due to applied forces and moments at the tire.
Radial loading of the tire was computed using a point contact model.
In 1977 Kenneth N. Mormon of Ford Motor Company presented a paper
[Morman, 1977] containing a detailed three degree of freedom model of the front
suspension. The model included the effects of lower control arm bushing compliance along
the axis of rotation (but not perpendicular to the axis of rotation) and compliance of the
ball joints connecting the tie rod ends to the steering knuckle. The model was derived
using a standard Lagrangian approach with constraint equations. A variety of displacement
type inputs were applied to the model; the results of the simulation matched experimental
results fairly well. In the original model all of the spring, dampers and bushings were
with appropriate nonlinear relations. It was also assumed that the sprung mass of the
vehicle forms inertial coordinate system.
In 1981 W. Riley Garrot described an all digital vehicle simulation developed at the
University of Michigan [Garrot, 1981]. The model contained a total of seventeen degrees
of freedom distributed in a manner identical to the HVHP model discussed above. To
reduce computational costs the steering system was described statically and the wheel-spin
degrees of freedom were handled algebraically. The model contained numerous features
which could be turned on or off as desired. These features included an anti-lock braking
system, multiple tire models, optional activation of nonlinear kinematic terms, solid rear
axle or independent rear suspension and interactive capability. The program was
constructed in a modular fashion to enable future enhancements and upgrades. The
simulation consisted of two main parts: a vehicle model called IDSFC and a
general-purpose driver module called DRIVER. The driver module could be readily altered
without affecting the vehicle model. The driver model controlled steering, braking and
drive torque inputs to the vehicle model. It contained five preprogrammed open-loop
maneuvers and could accept user defined maneuvers using tabulated data or a user defined
subroutine. Various closed-loop control strategies were implemented including a
crossover model for path following and two types of preview-predictor models. Mixed
open-loop and closed-loop control could be used. Validation of the model was performed
by comparison with the validated HVHP model.
In 1986 R. Wade Allen and several associates from Systems Technology Inc.
validate a simplified lateral vehicle dynamics model and the associated tire modeling
procedure [Allen, 1986]. The tests consisted of a number of steady state skid pad runs and
several low amplitude sinusoidal steer frequency sweeps while negotiating a steady turn.
The tests were performed for a rear wheel driver 1980 Datsun 210 and a front wheel drive
1984 Honda Accord. Several types of tires were used on the Datsun including both radial
and bias ply tires. The physical parameters describing the vehicles and the tires were input
into a simplified lateral handling model which was derived directly from Segel’s original
model [Segel, 1956b] and which was discussed above in the review of D. H. Weir’s paper
[Weir, 1968]. A good correlation was obtained with the experimentally obtained data. The
model was also used to extrapolate vehicle behavior under combined cornering and
braking. In 1987 Allen published a revised model containing five degrees of freedom
[Allen, 1987a]. The new model added pitch and forward velocity degrees of freedom and
was called VDANL (Vehicle Dynamics Analysis : Non-Linear). It was also a nonlinear
model and, unlike earlier linear models, the solutions were obtained in the time domain
using numerical integration. Neither of the models approach the complexity of some of the
other more detailed models discussed above [Okada, 1973][Speckhart, 1973][Jindra,
1976]; the intent was to provide a simulation code which could be run on relatively
inexpensive desktop PCs and which could utilize the graphical output capabilities of those
PCs.
In 1987 Andrez Nalecz presented the results of an investigation into the effects of
suspension design on the stability of vehicles and, in particular, how the design of the
suspension types were considered. A typical three degree of freedom lateral dynamics
model was used with the addition of a quasi-static pitch degree of freedom. The sprung
mass was assumed to rotate about a roll axis whose position varied as a function of body
roll. The location of the front and rear roll centers was found via a kinematic analysis of
the suspension in which the wheel contact patches were treated as revolute joints and were
allowed to move laterally along the ground (thus allowing for track width changes). It was
found that for certain types of suspensions, most notably the double wishbone and
MacPherson strut type systems, that the assumption of a fixed roll axis could not be
justified. In 1992 Nalecz published a second paper in which he described an eight degree
of freedom model called LVDS (Light Vehicle Dynamics Simulation) [Nalecz, 1992]. The
model consisted of a three degree of freedom lateral dynamics model coupled to a five
degree of freedom planar rollover model. The models are coupled through the inertia
terms and tire force terms. The lateral dynamics model was derived in the same manner as
Segel’s original model. The rollover model consisted of sprung and unsprung masses
connected through the various elements of the suspension system. The model also
included aerodynamic effects; all six possible forces and moments are modeled. The effects
of lateral and longitudinal weight transfer were accounted for in determining the lateral
forces generated by the tires. The roll axis was modeled in the quasi-static fashion
discussed above.
In the early 1990s R. Wade Allen and his associates at Systems Technology Inc.
published a number of papers in which they validated their VDANL simulation code
of vehicle stability and vehicle rollover are presented [Allen, 1990][Allen, 1991][Allen,
1993]. VDANL and IDSFC (which is derived from the HVOSM simulation code) were
also put through a rigorous validation process by Gary J. Heydinger et al at Ohio State
University [Heydinger, 1990]. Both validations were carried out by comparing
experimental data to simulation data in the time domain and in the frequency domain. The
control inputs from the experimental tests were recorded along with the vehicle responses
for later use as simulation inputs. Sinusoidal frequency sweeps and step inputs were used
in the testing. Heydinger explored the use of pulse inputs which require shorter test runs
and could excite the same frequency range in a later paper [Heydinger, 1993]. In studying
vehicle stability and rollover stability the authors gathered model parameter data for a total
of 41 different vehicles of various types. The connection between load transfer distribution
(which is largely governed by the relative roll stiffness at the front and rear axles) and
vehicle stability was discussed in detail. Simulation results for a set of maneuvers were
plotted. The effects of braking, acceleration and throttle lift on stability in limit handling
situations was also discussed. A similar paper, also using the VDANL software, was
written by Clover and Bernard at Iowa State [Clover, 1993]. Details of the updated
vehicle dynamics model VDANL were presented in [Allen, 1991]. The biggest change in
the model was the removal of the fixed roll axis assumption and the addition of a front
suspension model which reflects camber change with body roll. The model also included
the effect of lateral deflection of the tire, wheel and suspension which decreases the track
width and affects rollover stability. In [Allen, 1993] the authors demonstrated that the
studies in that it failed to cause unstable behavior and that it did not adequately model the
large lateral displacements which could occur in real world accident avoidance maneuvers.
Simulation results for larger lateral displacements (with the same peak lateral acceleration)
demonstrated both spinout and rollover.
By the early 1980s a shift in the vehicle modeling process was taking place. The
demand for accurate vehicle dynamics models combined with the difficulty in deriving the
equations of motion for large multibody systems led to the use of general multibody
simulation codes. A wide range of capabilities are present in modern MBS codes including
the ability to handle non-inertial reference frames, to incorporate flexible elements in the
model, to utilize generalized coordinates, and to symbolically generate the equations of
motion. Several reviews of multibody codes have been published in recent years, several of
which are discussed in more detail below. Additionally, brief descriptions of a few papers
utilizing MBS codes for vehicle dynamics simulations are presented below.
In 1985 W. Kortüm and W. Schiehlen presented a paper [Kortüm, 1985] which
they presented the desirable qualities of an MBS program, discussed two contemporary
examples in some detail and utilized the two codes to generate some simple vehicle
models. The first code discussed was NEWEUL which generates the equations of motion
in symbolic form with the output being FORTRAN code. It had the capability of using
both Cartesian and generalized coordinates, non-holonomic constraints and moving
reference frames. The second program was MEDYNA which generates the equations of
moving reference frames. Both codes supported the use of closed loops (i.e. four bar
linkages).
In 1993 W. Kortüm and R. S. Sharp published a supplement to the periodical
Vehicle System Dynamics in which the capabilities of 27 currently available multibody simulation codes and general purpose vehicle simulation codes were reviewed [Kortüm,
1993]. The programs discussed include ADAMS, MEDYNA, NEWEUL, DADS,
AUTOSIM, and SIMPACK among others. Tables were presented which offer
comparisons of the capabilities of the various codes. Kortüm discussed the desirable traits
of a multibody code and gave a brief discussion of the contemporary numerical methods
which are most applicable to vehicle dynamics simulation. Sharp discussed the four models
which were used in benchmarking and evaluating the codes in his introduction.
In 1994 R. S. Sharp wrote a paper in which he compared the capabilities of the
major multibody computer codes with emphasis on those which generate the equations of
motion symbolically [Sharp, 1994]. The codes reviewed were selected based on their
applicability to automotive simulation. He discussed the methods used by each code in
deriving the equations of motion with attention to the limitations of each method. In
particular he noted the limitations of each code with respect to the types of constraint
equations that could be handled. References to significant papers in the area of multibody
dynamics were given.
R. J. Antoun discussed a vehicle dynamic handling computer simulation created
using the multibody code ADAMS (Automatic Dynamic Analysis of Mechanical Systems)
pickup truck was created utilizing a combination of the standard ADAMS model definition
language and user written subroutines for non-standard system components such as the
tires. A detailed kinematic model of the front I-beam suspension and the rear leaf spring
suspension (using a three link approximation) was constructed. The effects of bushing
compliance were included in the model. Nonlinear shock absorbers were used. Excellent
agreement of simulation results with experimental data was obtained. Other studies were
made using models for a 1986 Bronco II and a 1986 Aerostar van. Using the respective
models the researchers were able to optimize the stabilizer bar dimensions and tire
characteristics at an early stage of the design process. The Bronco model contained 55
degrees of freedom. It was noted that the extensive graphical display capabilities of the
ADAMS program were invaluable in debugging the model geometry and in interpreting
the results.
A paper describing a model built utilizing a program which automates the
generation of the equations of motion was presented in 1991 by C. W. Mousseau
[Mousseau, 1991]. The program, AUTOSIM, was used to create a 14 DOF vehicle
model. The program used a form of Kane’s equations to derive the equations of motion
and applies extensive algebraic and programming optimizations to achieve high efficiency.
The user was responsible for choosing the generalized coordinates which describe the
configuration of the system. It was not necessary to use Cartesian coordinates and
numerous constraint equations to formulate the equations of motion. In generating the
vehicle model the location and orientation of the spindle was expressed in terms of four
polynomial functions of the suspension deflection (a quasi-static approximation). The
cubic polynomials were obtained from a kinematic suspension model. The effects of
suspension geometry and suspension bushing compliance were included in the suspension
model which was also created using AUTOSIM. Integration of the resulting FORTRAN
model produced good correlation with measured data. The computational efficiency of the
resulting model allowed it to be used in real time in a driving simulator. In 1993 Michael
W. Sayers published a paper in which AUTOSIM was used to generate a number of
vehicle models [Sayers, 1993]. The simplest model possessed 4 degrees of freedom system
while the more complicated models contained 10 degrees of freedom. The emphasis in the
paper was on demonstrating the ease with which computationally efficient models can be
generated and tested.
Yoshinori Mori et al at Toyota described a model created for simulation of active
suspension control systems in a paper presented in 1991 [Mori, 1991]. The vehicle model
was described using a simulation language. The control algorithms were coded in
FORTRAN and interfaced to the vehicle model. The vehicle model contained 20 degrees
of freedom. The unsprung masses were assigned three degrees of freedom each and the
sprung mass was given six degrees of freedom. Each of the front wheels was assigned a
single steer degree of freedom. The model also included a 19 degree of freedom
drive-train model. Provisions for front wheel drive, rear wheel drive and four wheel drive were
made. The road surface was modeled using a combination of a flat or undulating surface
In 1989 a research group at the University of Missouri-Columbia began a DOT
sponsored project to study the effects of vehicle design on rollover propensity [Nalecz,
1988]. A nonlinear 14 degree of freedom vehicle model called the Advanced Dynamics
Vehicle Simulation (ADVS) was developed to carry out this research. The model was
derived using a Lagrangian approach and utilizes quasi-velocities to describe the angular
velocities. The degrees of freedom were utilized as follows: three translational and three
rotational for the sprung mass, two for the front suspension and two for the rear
suspension and one rotational for each wheel. To study vehicle-terrain interaction it was
necessary to model the body of the vehicle as well as the terrain [Lu, 1993]. The vehicle
body was represented by a set of massless, three-dimensional nodes which obey nonlinear
force-deflection curves. Each node was checked for interference with the terrain at each
time step of integration and its position was adjusted as necessary. The force resulting
from body-terrain interaction was applied to the vehicle dynamics model. The terrain was
modeled by a single curve which was extruded along the direction of travel. This
prevented the use of curved roadways and other such fully three-dimensional structures
but it simplified the body node-terrain interference calculation substantially.
In 1993 the results of a program at Lotus Engineering to develop a vehicle
simulation code for studying the application of predominantly linear control algorithms to
the suspension of a nonlinear vehicle were published by J. G. Dickinson and A. J. Yardley
[Dickison, 1993]. Although commercial multibody simulation codes were available it was
desired to utilize a simpler model which did not require the large quantities of descriptive
paper utilized six degrees of freedom for the sprung mass. The front and rear suspensions
were modeled in a quasi-static fashion. Each wheel was assigned a ‘bump’ degree of
freedom which was measured relative to the sprung mass. The location of the
instantaneous pivot axis was determined from a look-up table based on the value of the
bump variable. Since the motion was handled in a quasi-static fashion the pivot axis
location, camber angles, wheel hub location, toe angle, effective spring rate, effective
damper velocities and so on could be calculated off-line. The front suspension was
modeled in the same fashion but adds a steering swivel axis and two degree of freedom
steering system. The tires were modeled using the Pacejka curve fits to measured tire data.
The longitudinal force at the tires was set by the driver acceleration input. The lateral
force was reduced accordingly by utilizing a standard friction ellipse. Wheel angular
velocities were apparently not included as degrees of freedom in the model. The authors
claimed a speed advantage of a factor of three over more complicated models generated
using standard multibody codes and hoped to increase the advantage to a factor of six in
later versions of the software.
In 1996 Michael R. Petersen and John M. Starkey described a relatively detailed
straight line acceleration vehicle model for predicting vehicle performance [Petersen,
1996]. The model included longitudinal weight transfer effects, tire slip, aerodynamic
drag, aerodynamic lift, transmission and driveline losses and rotational inertias of the
wheels, engine and driveline components. A manual transmission was assumed with 100%
clutch engagement. Shifts were simulated by disengaging the clutch completely, assuming
the full torque of the motor. Shifts occurred when the applied torque at the rear wheels in
the next gear exceeded the torque at the rear wheels in the current gear, or alternatively,
when redline was reached. After validating the model the authors conducted sensitivity
analyses to determine which design parameters most strongly affected vehicle
performance.
Driver Modeling
Beginning in the early 1960s an increasing emphasis on vehicle safety created a
push toward modeling vehicles under the more demanding conditions associated with
crash avoidance maneuvers. In order to accurately represent the reactions of the vehicle
under these circumstances it was necessary to include the driver as an integral part of the
model. While this fact had been recognized in the early 1960s it was not until the late
1960s that increasing computational power and an improved understanding of vehicle
dynamics and driver behavior made it practical to model the driver and vehicle together.
In 1968 David H. Weir and Duane T. McRuer of Systems Technology Inc.
published the first in a long series of papers on modeling driver steering control (lateral
control) [Weir, 1968b]. The vehicle dynamics were modeled using Segel’s equations
[Segel, 1956b]. The equations were Laplace-transformed and the analysis was performed
in the frequency domain. The transfer functions relating the motion variables to the inputs
were taken from Weir’s earlier paper [Weir, 1968a]. Although Segel’s steering system
model was available [Segel, 1966], the lack of dynamic data on vehicle steering systems
system dynamics. The driver model was divided into four subsystems: quasi-linear
compensatory control, pursuit control, precognitive control and a remnant.
The quasi-linear compensatory control consisted of a describing function with
parameters which were adjusted to fit the situation and the system, an additive remnant
and a set of adjustment rules. The form of the driver model, of the describing function and
of the parameter adjustment rules was derived from extensive experiments involving
human operators. It was noted that the parameter adjustment rules could be eliminated by
considering the combined response of the vehicle/driver system. In this case an approximate crossover model was found to represent driver/vehicle behavior adequately.
This simplification was a result of experimental studies involving human drivers which
found that drivers adjust their behavior to obtain an approximately invariant form for the
combined vehicle-driver response function.
The pursuit control subsystem modeled the driver’s ability to see the roadway
ahead. This is in contrast to the compensatory subsystem in which the driver reacted to
errors in the current position of the vehicle. The details of pursuit control are not
mentioned except to note that experimental evidence indicates that the magnitude of the
feedforward describing function was approximately equal to the inverse of the magnitude
of the vehicle response function. Thus the command path and the actual vehicle path are
nearly identical. It was also noted that compensatory control was often used in
combination with pursuit control to regulate errors in path following.
The precognitive control model attempted to mimic learned driver responses. A
another automobile. Weir and McRuer note that these types of maneuvers do not involve
a feedback based on position information or a feedforward based on the desired path. The
maneuver is initiated by the driver in response to stimuli other than those involved in
pursuit and compensatory control. No other results are presented by Weir and McRuer
beyond defining the nature of precognitive control.
The driver remnant component of the model accounted for the portion of the
driver’s output which was not linearly correlated with the input. It was modeled as a
random input which was described by an experimentally obtained power spectral density.
It was noted that the major source of this remnant is due to variation of the parameters of
the driver describing function. The remnant could be neglected for vehicles which
demonstrated good response characteristics.
Following discussion of the various model components them authors presented the
results of a guidance and control analysis of the potential loop closures for compensatory
control. A number of multiloop structures were considered. The best multiloop feedback
structures were considered to be those which demonstrated good frequency response and
required minimal driver attention. Based on the author’s analysis it was concluded that a
feedback structure based on heading angle and lateral acceleration gave the best results. A
review of perceptual experiments performed by other authors [Gordon, 1966a][Gordon,
1966b][Crossman, 1966] corroborates Weir and McRuer’s conclusions.
In a later paper Weir and McRuer reviewed data from experiments on the
directional response of vehicles subjected to cross wind gust disturbances. Driver/vehicle
McRuer’s earlier assertion that the driver’s steering outputs could be explained as
functions of lateral position and heading angle or alternatively as functions of path angle
and path rate.
In 1975 Errol R. Hoffman presented a paper [Hoffman, 1975] in which he
reviewed the state of the knowledge of human control of road vehicles. He covered lateral
control and longitudinal control of automobiles and motorcycles. The areas of research
reviewed in the paper were divided into the following major categories: lateral control of
automobiles, lateral control of motorcycles, longitudinal control of automobiles and
combined lateral and longitudinal control. The relevant portions of Hoffman’s review of
the literature in the areas of lateral and longitudinal control of automobiles is summarized
below. The work done in the area of lateral control was divided it into four sub-groupings:
lateral control vehicle dynamics, perceptual studies, mathematical models of driver
steering control and vehicle characteristics and driver/vehicle performance.
Hoffman classified the work done on lateral control vehicle dynamics category into
the following three categories: fixed control, free control and vehicle-driver interface
variables. Fixed control occurs when steering wheel input angle is specified directly. Free
control occurs when the steering wheel input is in the form of a specified torque. The
majority of the research up to the time of publication of Hoffman’s review had been
performed on the fixed control mode; very little work had been performed using free
control. Hoffman noted that, in reality, a human driver uses a combination of the these
two types of control. He also noted that the proportion of each type of control varies with
vehicle dynamics category encompassed research done on driver/vehicle interface
variables. Driver/vehicle interface variables are defined as the quantities which relate
steering wheel input (either angle or torque) to vehicle response. Typically they are
approximations to the actual output and are used in determining gains in the control
algorithms. Again, the majority of the existing work concentrated on identification of the
gains associated with fixed control (i.e. neutral steer path curvature vs. steering wheel
angle, etc.). Very little work had been performed relating steering force to vehicle
response for the free control mode.
At the time of Hoffman’s review a number of papers on driver perception of the
roadway had been published. Several papers suggested that the driver uses the perceived
velocity field to guide the vehicle. Later studies of driver eye movements indicated that
peripheral vision is used to monitor steering control for tracking and directional guidance
while central vision is used for obstacle avoidance. Studies of driver steering control
movements indicated that vehicle yaw rate and inertial lateral deviation are the most
probable control cues used by the driver.
Hoffman reviewed a variety of mathematical models available in the literature at
the time. He included a brief review of the quasi-linear model proposed by McRuer et al
which was discussed in above. He also briefly discussed the predictive models of Kondo
and Ajimine and of Yoshimoto [Kondo, 1968][Yoshimoto, 1969]. These models were
single loop models which used estimated position and heading data as feedbacks. Hoffman
also mentioned an optimal control model outlined by Roland and Sheridan [Roland,