http://wrap.warwick.ac.uk/
Original citation:
Kurtonina, N. and de Rijke, M. (1996) Directed simulations. University of Warwick. Department of Computer Science. (Department of Computer Science Research Report). (Unpublished) CS-RR-307
Permanent WRAP url:
http://wrap.warwick.ac.uk/60991
Copyright and reuse:
The Warwick Research Archive Portal (WRAP) makes this work by researchers of the University of Warwick available open access under the following conditions. Copyright © and all moral rights to the version of the paper presented here belong to the individual author(s) and/or other copyright owners. To the extent reasonable and practicable the material made available in WRAP has been checked for eligibility before being made available.
Copies of full items can be used for personal research or study, educational, or not-for-profit purposes without prior permission or charge. Provided that the authors, title and full bibliographic details are credited, a hyperlink and/or URL is given for the original metadata page and the content is not changed in any way.
A note on versions:
The version presented in WRAP is the published version or, version of record, and may be cited as it appears here.For more information, please contact the WRAP Team at:
Research
R.port
307
Directed
Simulations
Natasha
Kurtonina
and
Maarten
de Rijke
RR3O7
Although negation-free language.s are widely used in-logic and computer science, relatively
little
is
known about
their
expressive
power.
To
addr-essthis
issue we
consider
a
kind
of
non-symmetric bisimulations called directed simulations, and use these
to
analyze the expressive power and model theoryof
negation-free modal and temporal languages. Wefirst
use them to9_!'tai.n preservation, safety and
definability
resultsfor
aiimple
nEgafion-free modal language.We then obtain analogous results
for
stronger negation-free languages.ninaity,
weexteid
o"urmethods to deal
with
languages with non-bobleaniegation.
Department of Computer Science
University of Warwick Coventry CV47AL
Directed Simulations
Natasha
Kurtoninal and
Maarten
de Rijke2t
Centerfor
Logic' Ghent UniversityRozier 44, 9000 Ghent, Belgium
Natasha. Kurtonina@rug. ac . be
2 Dept. of Computer Science, University of Warwick Coventry CV4
7AL,
Englandmdr@dcs . warwick. ac . uk
Abstract
Although negation-free languages are widely used
in
logic andcom-puter science, relatively
little
is known about their expressive power.To address this issue we consider
a
kindof
non-symmetricbisimu-Iations called directed simulations, and use these
to
analyze theex-pressive power and model theory of negation-free modal and temporal
languages. We first use them
to
obtain preservation, safety andde-finability results for a simple negation-free modal language. We then
obtain analogous results for stronger negation-free languages. Finally,
we extend our methods to deal with languages with non-boolean
nega-tion.
1
Introduction
In
many
areasof
computer science onefinds
logical formalismsthat
lack someor all of
the
standard boolean connectives'and"
'or'
and
'not.'
In
particular,
negation-free logics are widely usedin
areas as diverse asseman-tics of
programming and knowledgerepresentation.
In
some applicationsboolean negation
is unnatural
[21].
Pxcluding boolean negation mayim-prove
the
complexityof
the satisfiability problem [7],
andit
may restoremonotonicity of the semantic interpretation
function
[19].Despite
their
wide applicability
negation-free languageshaven't
been studied as extensively as languageswith full
boolean expressivity. We wantto
fill
this
gap by studying the expressive power of negation-free modal lan-guages. Recently, these haveattracted
considerableattention, both
at
an applied andat
a theoretical level;cf.
[8, 11, 14]. Now,for
modal languageswith
afull
boolean repertoire bisim,ulations have proved to be an importanttool in
understandingtheir
expressive power(cf.
[9,4,
I,
17,15])' In
thiskind of non-symmetric simulations called directed simulations between tran-sition systems
that
allow usto
study the expressive power and develop the model theory of negation-free languages. As far as we know, this is the first paperto
do soin
a systematic way.Our point of
the
departureis a
simple negation-free modal languagewith
boolean conjunction and disjunction, andO
and!;
for this
languagewe introduce directed simulations, and use these
to
arriveat
results onex-pressiveness and
definability.
We then extendour
ideas and techniques soas
to
copewith
other negation-free description languages, includingtermi-nological logics, negation-free fragments
of
Since/Until
logic, and featurelogics.
After that
we adapt our methodsto
copewith
languages containing non-booleannegation.
We concludewith
a
summary and suggestions forfurther
work.2
Definitions
Negation-free
O,
o-formulas
arebuilt
up from propositional variables p, q, . . . , and the constantsT
andI,
using boolean conjunction A and disjunction V, and the unary modal operatorsO
(diamond) andI
(box). We use .Ce,3to
denotethis
language, andLl,o
to
denote .Co,owith
boolean negation.A
transition
system(or
model)for,Ca,a
is a triple
M :
(W,R,V),
where
W
is a non-empty set of states, l? is a binary relationonW,
andV
is
a
ualuation onM,
that
is:
a function assigning a subsetof
tr4lto
everyproposition
letter.
We sometimeswrite
lMl
to
denote the domain ofM.
The
sati,sfaction relat'ionis
definedin
the familiar
wayfor
the
atomiccase and
for
the boolean connectives A andV;
observethat
we can alwaysinterpret
boolean negation onour
models, even whenit
is not
present in our language, For the modal connectives weput
M,,
?
Od itr there existsu." such
that Rwwt
andM,w'
ts
Q; andM,u
?
trOiff
for
alltr'
such thatRuu',
Mr.' I
d.The
(negati,on-free) modal theory of a state tu isthe
set nf-tp(w):
{Q eLo,o
Iu
ts
0\.
If
we wantto
emphasize thetransition
systemM
in
whichtr
lives, wewrite
nf-tpyQa).Modal logic is just one of many possible description languages for specify-ing and constrainspecify-ing transition systems. We
will
encounter several languagesin
this
paper, and we relate themall to
first-orderlogic.
To be precise, letLl
be the first-order languagewith
unary predicate symbols correspondingto
the
proposition lettersin
.Co,n, andwith
onebinary
relation symbol R.,C1 is called the correspondence language for ,Co,a.
h(")
denotes the setof
all
41-formulas having one free variabler.
To view transition systems as ,C1-structures in the usual first-order sense,
we use V (p)
to
interpret the unary predicate symbolP
that
corresponds toSf
"@)
of
Lr. It maps
proposition lettersp
onto unary predicate symbolsPr,
rt
commuteswith
the booleans, and the modal cases areSr"Qil:1y(Rry
ASra@))
and^9?"(!d):Yv(Rrs
-+Sry(il).
For
all
transition
systemsM
and states u.r we haveM,. F
0
ifr
M
=
ST"(Q)[ru), where the
latter
denotes first-order satisfaction of ST"(Q) underthe assignment of
tr
to
the free variabler
ofSf
"@).A
modal formula/
issaid
to
correspondto
a first-order formulaa(r) if
I
ST"(il
++a(r).
3
Simulations for
Lo,n
In this section we adapt the notion of bisimulation to the setting of negation-free
modal formulas. The
resultingnotion of
directed simulationsis
then usedto
analyze the expressive power of negation-free formulasin
three dif-ferent ways:in
terms of preservation, safety, and definability.Definition
3.1
(Directed
Modal
Simulations) Let Z
be a non-emptybinary
relation
betweentwo
transition
systemsM
and
N,
that
is,
Z
e
lMl
"
lNl.
Then
Z is
calleda
directed (modal)simulation
betweenM and
N
if
it satisfies
the following clauses:l.
If uZu
andp is a proposition letter suchthat
M,-
?
p, thenN,u
I
p.2. If
uZu
and Ruu'. then there existsu'
inM
suchthat
Ruw'
andw'Zu'
(back).
3. If
uZu
and Rtaut, then there exists u'in
N
suchthat
Ruut arrdw'Zu'
(forth).
We
write
Z
:
M
)N
(Z
:
M,w
tN,u)
to
indicate
that
Z
is a
directedsimulation between
M
andN
(that
links tr-rto
u).A
(strong) bisimulati,on is a directed simulation for which clause 1 aboveis an equivalence:
if
uZu
thenM,w
lp
iffN,u
Fp.
W"
writeZ
:M
?
N
to
indicatethat Z
is a bisimulation betweenM
andN.
The back-and-forth conditions in clauses 2 and 3 of the definition of directed
simulation allow
usto
transfertrue
tox
and diamond formulasfrom
onetransition
systemto
another. Unlike the atomic clausein
ordinarybisimu-lations,
our
atomic clause 1 doesnot
displaythis
back-and-forth behavior.As Theorem 3.5 below shows, this is exactly
what
is neededto
characterize negation-free modal formulas.Hennessy and
Milner
[9, Section 2.2] introducea
notion
of
simulation where even moreof
the back-and-forth conditionsfrom
ordinarybisimula-tions
are missing:it lacks clause
3of Definition
3.1. In
the
conclusion ofthe paper we
point
how our results carry overto that
setting.
Asfar
as we$3.1.
Preservation.
our
first
perspectiveon the
expressive power of negation-free modal formulas isin
terms of preservation.Proposition 3.2
For all negation-free modal formulas Q, andall
transi,tion systemsM
and N, andall
statesu
€ lMl
andu
€
lNl,
if
there erists adirected sirnulat'ion
Z
:M,ru
lN,
u,
thenM,.
?
$
impli,esN,u
? d.
Proof.
Use induction on formulasin
fo,r.
The
back andforth
clauses inDefinition
3.1 were introduced especiallyto
dealwith
the two modal cases.Here's a proof for
the
D case (the O case issimilar).
Assumew
+
aO,Z
:
M,tr.rI
N,u,
andRuut. By
clause 2of
Definition
3.1 there existstll
such
that Rww'
andZ
;M,w'
)
N,ut.
As Rututt, we getu,
=
O, andas
Z
:ut
)
ut, we get utI /.
Sinceu'
wasarbitrary,
it
followsthat u
=
DO,
as
required.
-lThus,
the
existenceof a
directedsimulation
betweenM,w and
N,u
guarantees
that
nf-tp1a(r)
g
nf-tpp1(u). Clearly,if
in
addition, thereis
adirected simulation going
in
the opposite direction, from N, u toM,to,
thennf-tpy(w)
:
nf-tpx(u).
The obvious question, then,is:
does M, u;)
N,u
and N,
u
)
M,tl;
imply
that
M,w
t)
N,u7
The
answeris
negative, andthe following example shows
that
directedsimilarity in
two directions is, ingeneral, weaker than strong bisimilarity.
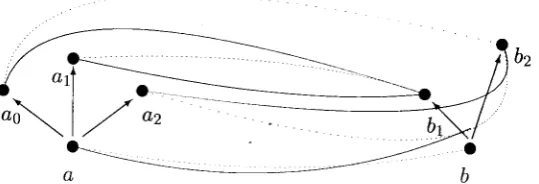
Exarnple
3.3
Considerthe
modelsM1
andM2
asin
Figure1.
That
is,Mt :
({o,oo,ar)a2})Rt,Vt)
andM2
:
({b,h,bz},Rz,Vz),
where R1 is{(o,on) | 0
<, (
n}
andRz:
{(b,bt),(b,b2)};
the
valuations V1 andV2 are definedby
Vt@)
:
{oo,ot,az},
Vr(q)
:
{oo,ot),
and
[(") :
{or};
[image:6.595.157.427.520.612.2]Vz(p)
:
{h,bz},
Vz(q):
V2(r):
{b1}Figure 1: Two directed simulations.
Define Zo
e
lMtl
"
lMzl
and Zye
lMzl
x
lMr I bvZs :
{(o,b), (oo, br),(or,br),(oz,bz)}
21 :
{(b, o), (br , ar ), (bz, az), (bz, ao)}.Then Zs is a directed simulation between
Mr
andM2 that
links ato
b, andZl
is a directed simulationthat
links bto a.
However, there is no ordinarybisimulation linking a
to
b-
thereis
no statein
M2
to
which o0 can belinked
in
a bisimulation.To formulate a converse to Proposition 3.2 we define a transition system
M
to be
image-fini,teif
for
every state u.re lMl
the
setof its
successors{u e
lMl
I
Rwu} is finite.Proposition
3.4
LetM and N
be image-finite models wi,thw
e lMl,
u €lNl.
Then the following are equ'iualent:1. nf-tpy(ut)
Q nf-tpy(u)2.
M.u
)
N.u.
A
first-order formulaa(r)
in
L1 rs preserued under directed simulationsif
for
all
transition
systems M, N,all
statesu
e lMl
andu
€
lNl
andall
directed simulationsZ
:
M,u
)
N,u
we havethat
M F
o[.]
impliesN
!
a[u].Theorem 3.5 (Preservation Theorem)
Let
a(r)
be an L1(r)-formula.Then
a
is
equ'iualentto
the standard translationof
a
(negation-free) modalformula
i,ffit
is preserued under di,rected simulations.Proof.
Tlie
proof
uses some basicfirst-order model
theory;
werefer
the readerto
Hodges [10] for background material. Theright-to-left
implication is immediate from Proposition 3.2. For the other direction, assumethat
a(r)
is preserved under directed simulations. By a simple compactness argument
it
sufficesto
showthat
the negation-free consequences ofa
imply
a:(1)
NF-Mod-Cons(a):: {Sr"(il
|al Sr"(/)
and Qe
Le,a}
|
a'
To prove (1), assume that
M
I
NF-Mod-Cons(a)lwl; we have to show thatM
I
altu). Consider the following set of .Cj,o-formulas:-tp(w)
t:
{-6
| Q€
Lo,o andM,-
V
d}.
That
is: -tp(ta)
consists of negations of negation-free modal formulasthat
are refuted
at
r.
Claim
L.
The set{a}U
{STr?il
| -d E-tp(ta)}
is
satisfiable'Proof.
Assumethat
it
isnot.
Then thereexist
formulas-dr,
.'-,
-Q,
€-tp(tu)
suchthat
d
=
srr(h
)v
...v
sr"(0;.
By
definition,
dr,
...,
Q,
are negation-free, soM,u
I h
V...
V Qn, and henceM,- ?
Si
for somei
with
0
<
i
<
n.
But
then-d (
-tp(w)
-
acontradiction. This proves Claim
1.
-lLet
N,u
be suchthat
N F
o[r]
and -A/,u
?
-d
for every formula-d
€-tp(u).
Claim
2.
nf-tpyr@)!
nfapy(w).
Proof.
SupposeS
e
nf-tp*(u),
but
M,-
V
Q.
Then
-/
6
-/p(tr),
and henceN,,
F
-Q,
by the definition of N, u-
a contradiction.This
provesClaim
2.
-lNow,
to
'lift' a
from
N,u
to
M,ur
we makea
detour
via two
othertransition systems as follows. Take r,,'-saturated elementary extensions M*,,u.r
and
N*,
u ofM,u
and N, o, respectively.And
define a relationZ
C
lN.l
xlM.l
by putting
uZt
ifr
nf-tpw.@) Qnf-tpu.(t).
Note
first
that
Z
is non-empty: by Claim 2 we havenf-tpy(u)
e
nf-tp1,a(w),and so
nf-tpp-@) C
nf-tp1r1.(tr.'), asM*,u and
N*,,u
are elementary exten-sions ofM,w
andN,u,
respectively.Next, clause 1 of Definition 3.1 is
trivially
fulfilled.
To seethat
clause 2is satisfied, suppose that
uZt
andRttt;
we needto find
au'such
that Ruul andutZtt.
P:ut-nf-tp(t')
:
{Qe Lo,o
IN*,t'
V
O}We
will
show that any finite subset of-nf-tp(tt)
is refutable in an /?-successorof
u.
Let
Qt,...,
Qn€
-nf-tp(t').
ThenN*,
t
* a(ftv...
v Qn),so, asuZt,
M*,u
f
o(4,
V...
V/").
This impliesthat
for
someu' € lM.
Iboth
Ruu' andz'
V
hV
...V
Qnhold.
Now, by c.r-saturation ofM*,
allof
-nf-tp(t')
canbe
refutedat
an -R-successorut of
u.
For
this
LL' we haveRuut
andnf-tp(u')
c
nf-tp(tt), that is:
u'Zt',
as required.For
clause3
we argue asfollows.
Supposethat
uZt and
Ruut.
Weneed
to
find
af/
suchthat
Rttt
andu'Zt'1
we achievethis
by showing thatevery
finite
subsetof
nf-tp(ut) is satisfiablein
a successor off.
Let
dr,
. . . ,Q"
e nf-tp(u').
Thenu
?
O(drA...AQn),
and hencet F
O(drA.
..A/").
Sothere exists
at'tn
N*
with
N*,t'=
y'1A...AQ'-and Rttt.
By t.r-saturationall
ofnf-tp(u')
can be satisfied in a successorf/
oft. For
thisf'
we have -Rftland nf-tp(ut)
c
nf-tp(t'),
that
is:utZtt,
as required.Example 3.6
Leta(r)
be a first-order that is preserved under strongbisim-ulations.
Thenc(r)
is equivalentto
a
modal formula$ in
Llp
that
mayinclude boolean negation.
By
testing whethera(r)
is
preserved underdi-rected simulations we can
find out
whether/
is
in
fact
equivalentto
anegation-free modal formula.
An
easy example is the first-order formulaa(r)
:
)A (RrA n-Pg).
This formulais the
first-order translationof O-P,
andit
is certainly
preserved under strong bisimulation-
but
here's an example showingthat
it
is notpreserved under directed
simulations: take
Mr
:
({ot,az},{(a1,a2},V1),
and
M2:
({br,bz},{(h,bz),Vz),
where V1 and V2 are suchthat
all a1, b1,b2
verify
all
proposition letters, and suchthat all
propositionletter but
pare
true in
a2. Clearly, there exists a directed simulationlinking
a1 and b1,btft
M1F
o[or],
whereas M2ft
afb1l.By Theorem 3.5 directed simulations uniquely identify a certain fragment of first-order logic, namely
the
'negation-free modal fragment.'By
identify-ing
and comparing fragments of first-order logicthat
correspondto
modal languagesin
this
manner, we havea
methodfor
comparing the expressivepower
of
(negation-free) modal languages.We proceed
with
three corollaries to Theorem 3.5 and itsproof.
The firstof these concerns a 'dual' to preservation under directed simulations: a first-order formula
a(r)
is saidto
be anti,-preserued under directed simulationsif
for
all
transition
systems M, N,all
statesu €
lMl, u
€
lNl
and alldirected
simulationsZ :
M,w
)
N,u'
we havethat
N f
a[u]
impliesM
I
aful.
Next,
calla
modal formulain
,C],3
negat,ion-richif
it
isbuilt
up from constants and negated atoms
-p,
using only V,A'
O andtr'
corollary
3.7
Leta(r)
be anL1(r)-formula.
Thena
is
equ'iualentto
thestand,ard, translation of a negation-rich modal
formula
iff
it
is anti-preseruedunder directed sirnulations.
Proof.
Use Theorem 3.5 andthe fact
that
the
negationof
a
negation-freeformula is equivalent
to
a negation-richformula.
-lThe
following corollary characterizesthe relation
'nf-tp(u)
I
nf-tp(to)' between statesu,
u in terms of directed simulations. We refer the reader to Hodges [10] for the notion of an ultrapower'Corollary 3.8
LetM and
N
be two transit'ion systems, andlet
w
€
lMl
andu
€
lNl.
Thennf-tpy@)
e
nf-tp*r@) iff
for
some ultrapowersM*,u
of M,u, andN*,u
ofN,u,
we haue thatN*,
uI
M*,u.
Proof. The right-to-left
implication is easy. Forthe
converse' consider theM*,rD,
starting from the
assumptionthat nf-tp^r(r)
c
nf-tp1a(w).
By
aresult
in
first-order model theory, these or-saturated extensions may beob-tained
as suitable ultrapowersof
the original
modelsM,tn
andN,u;
seeChang and Keisler [6, Theorem 6.1.1] for
details.
-1Corollary
3.9
A
modalformula
in
Ll,
is
equ'iualentto a
negation-free modalformula
iff
it
is preserued under directed sirnulat'ions.Proof. The left-to-right implication
is
Proposition3.2.
For
the
right-to-left
implication,
use Theorem 3.5 plusthe fact that
modal formulas areequivalent
to
their first-order translations under^9?r.
-1Example 3.L0
The formula
O-p
whosefirst-order translation
wascon-sidered
in
Example 3.6 provides an exampleof
a
formulathat
is not
pre-served under directed simulations, and hencenot
equivalentto
a negation-free modal formula. The formulaO(TV-p),
on the other hand, is preservedunder directed simulations
-
and hence equivalent to a negation-free modalformula, namely OT.
To conclude
this
subsection we present an alternative semanticcharac-terization of the
(modal) formulas preserved under directed simulations in termsof their
monotonicity behavior. Wecall a
modal formula Q upward monotonein
a proposition letter pif
for all modelsM
and states t.o we havethat
if
M,. | /
andM/
is obtained fromM
be extending theinterpreta-tion
ofp
(and leaving the rest unchanged), thenM',u
I /;
the notion ofdownuard monoton'ic'ifg is defined dually.
By
[17] a modal formula is/
is upward monotone inp iff p
occurs onlypositively
in
/,
meaningthat
all
occurrences ofp
should bein
the scope ofan even number of negation signs. More generally, a modal formula is called pos'itiue
iff
it
can bebuilt
up fromT
and proposition letters, using only V,A and
O
(see [17, Section 7]for
the generalpicture).
Although everypos-itive
formulais
(equivalentto)
a negation-free one,not
every negation-freeformula
is
(equivalentto)
a positive one:!I
is an example. Therefore, the semantic characterization of positive modal formulasin
terms ofpreserva-tion
under surjective homomorphismp givenin
[17, Theorem 7.15] doesn'tapply
to
negation-free modal formulas.What
we do have isthe
following extension of Corollary 3.9.Theorem 3.LL
Let S be a modalformula.
Thefollowing
are equiualent:1.
Qis
equiualent to a formulain
whi,ch all proposi,tion letters occur only positiuely./r.
d
is
upward monotone i,nall
its propos'ition letters.Proof. The implication 1
+
2 is
easy;the implication
2
+
3
is
Proposi-tion
3.2, andthe implication
3+
4
is immediate fromthe
fact that if
M'
is
transition
system obtained from a transition systemM
by
extending theinterpretation
of a propositionletter
(and leaving the rest unaltered), thenthe
identity
relation is a
directed simulationfrom
M
to
M'.
Finally,
theimplication
4+
I
is [17, Theorem7.15].
-l$3.2. Safety.
In
this
subsection we takea
different perspectiveon
the expressive power of negation-free modal languages by considering the notionof safety recently introduced by van Benthem [3].
Let
a(r,g)
denote a first-order formulawith at
most two free variables.Then
a(r,
gr)is
called safefor
bisimulationif
wheneverZ
:
M
g
N
with
uZu and
M ?
alww'),
then
there existsa
'u' suchthat w'Zu'
andN
p
aluu'1. The formulaa(r,y)
is best thought of as an operation on the binary relationsliving
inside the transition systems M andN,
and the question for safety can be understood as asking whetherthe
back-and-forth-conditionsof
Definition
3.1 holdfor
a
whenever they holdfor
the relation symbols ina.
The definition of
safety dependsin
an essential wayon the
symmetric character of bisimulations:if
the operation explessedby
a
is performed inM,
thenit
can be matched by anc
stepin
N,
and vice versa.What
is the appropriate notion of safety for directed simulations? Theirnon-symmetric character causes a
split
in the notion of safety, depending onwhether the operation
a
is performed on the left-hand side or on the right-hand sideof a pair of
directedlysimilar transition
systemsM
andN.
To be precise, a first-order formulaa(r,y)
isleft
safe for directed simulationsif
wheneverZ:
M
_?N with wZu
and MI
a[utw']
then there exists a u' suchthat
u'Zu'
andN
I
aluu'). A
first-order formulaa(r,y)
is right
safefor
directed simulationsif
whenever Z:M
JN
with
uZu
andN
p c[ou']
then there exists a tl' such
that wtZut
arrdM
I
alruw'1.For example, atomic tests P?, whose semantics are given by
(r
:
y)nPr,
are
left
safe,but
notright
safe. On the other hand, tests on negated atoms:p
&r€right
safe, but not left safe. More generally, all negation-rich formulas areright
safe.Recall
that
the composition R ; S of two relationsR
andS
is given byR;
S
:
{(",A)
|
-z(Rrz
n
Szy)}.
The dual
operationof
composition isdenoted
by
+,
and defined by -R+,9:
{(r,A)
lVr(RrzV
S"a)}.
Then, wehave the following characterizations of
left
andright
safety.Theorem 3.12 (Safety)
Leta(r,a)
be a first-orderformula
in L1(r,y).
1.
Thena(r,a)
is
teft
safefor
di,rected s'imulat'ions i,ff it can be defined2.
Further,a(r,y)
i,sright
safefor
directed s'imulat'ionsiff
it can
bede-fi,ned
from
the negated atom,ic relat'ionR
and testson
negation-rich modal formulas using only-
and n.Our proofs of the above results are tailored after similar results
in
[3]; theyrequire
a
careful analysisof
so-called continuous negation-free formulas,which we have included
in
anappendix.
Here arethe
relevant definitionand lemma.
Definition
3.13 A
modal formula Q@)i"
cont'inuousin
p if
the following holdsfor
every transition system (W,R,V):
for
eachfamily of
subsets{Xt}a
suchthat V(p)
:
UoXtt(W,R,V),*
?
@ iff, for somei,
(W,R,V),-
I
/,
whereV@)
:
Xi and
V(q)
:
V(q)
for q#
p.Example 3.14
The formula Dp isnot
continuous inp,
but
Opis.
And
in fact thelatter
format typical for safety, as is shown by the following lemma.Lemma 3.L5 A
negation-free forrnula is cont'inuous inp iff
it
i,s equiualentto a
disjunction of formulasof
theform
gsAO(d,
n...n
O(Q"np)...),
where eachof
the formulas$i
is
negation-free and p-freein
the sense that they don't contain occurrences of p.A
proof of the above lemma may be foundin
AppendixA
below.Proof
of
Theorern 3.12. Wefirst
provepart
1 of Theorem 3.12. To see thatthe constructions mentioned are indeed left safe, argue as follows.
It
is clearthat
the
atomic relation and tests on negation-free formulas areleft
safe.To see
that
composition isleft
safe, assumethat Z
:M,tu
lN,u,
and thatu51l
S2wt , where the back-and-forth conditions of Definition 3.1 hold for 5rand,52
in
M. Then, there exists
tll/
with
uS1wtt52. AsZ
is assumed to bea directed simulation for.91, there exists
au"
in
N
with
uSyuttandu"Zu",
and, likewise, there exists a
u'
€
ll/l
with
utts2ut andu'Zut.
Thelatter
isthe
required ,Sr ; r92-successorin
N. Showing
that
choice (U) isleft
safe isleft to
the reader.Now,
to
provethe
more complexleft-to-right half
of part
1of
Theo-rem 3.12,let
a(r,g)
be a first-order operationthat
isleft
safe, and choose an€?, proposition letter
p.
Our first observation isthat
ly
(a(r,
y) nST, (p))it
preserved under directed simulations
-
this is immediate from the fact thata(r,y)
isleft
safe. As a corollary we havethat,
by our Preservation Theo-rem 3.5, 19(a(r,A) ASTy(p))
is equivalent to a negation-free modal formula@. In addition, because of the special syntactic form of
)y (a(r,y)
nSf
r@)),this formula
/
is continuous inp.
Therefore, by Lemma 3.15 we may assumethat
it
is a disjunction of formulas of the form6o A
o(hn
... n
o(d"
np).
. .),where each of the formulas
/;
is negation-free and p-free. To complete the proof we need one more observation, viz.that
a(r
,y)
is definable as a unionof relations of the form
(2)
(do?);R;(Qt?);"';R;(Q"?),
where, again, each
of the
formulas @; is negation-free.But
this
is exactlythe syntactic form specified
in
the theorem, and, hence,this
provespart
1.We now
turn
to part 2 of Theorem 3.12. Observefirst that
all the operationslisted
in part
2 ofthe
theorem are indeedright
safe. Forthe
converse) weargue as follows.
If
a(r,y)
is aright
safe first-order formula, then-a(r,
g)is a left safe formula, hence, by
part
1,it
is equivalent to a union of formulasof the form
specifiedin
(2).
But
then
a(r,A)
must be
equivalentto
an intersection of formulas of the dual form0/o7)
:
-J?+ (rb{) +
...
-
-R
+
(r1,"?),where each
of
tlne{;
is a
negation-richformula.
As
this
is
the
requiredsyntactic form,
this
provespart
2 of thetheorem.
-lThere is a
natural
follow-upto
Theorem 3.12:what
are the first-orderoperations
a(r,A)
that are doubly safe for directed simulations, i.e., formulasthat
areboth left
andright
safe.Theorem
8.LG Leta(r,y)
be a formula i'nLt(r,A)- Then
a(r,y)
is doublysafe
for
directed simulat'ions i,ffit
can be definedfrom
the atomic relation Rand tests on negation-free modal formulas without occurrences of propos'it'ion
letters usi,ng only
;
and U.Proof.
Theright-to-left implication
is easilyverified.
For the converse'as-sume
that
a(r,y)
is doubly safe.By
Theorem 3.72a(r,y)
is equivalent toa formula
B
,:
V
((d;o?) ;R;...
;R;
(Qnn?)),i
where each $61, is negation-free;
a(r,y)
7
':
n
ftlio?)
=
-R;
J
is also equivalent
to
a formula...=
--R+
({67)),
where each
{ix
is negation-rich.Let
uswrite [T/p]d
to
denote the result ofsubstituting
T
for all
occur-rences of all proposition letters in
X.
Wewill
showthat
I
a
<+ lTlf1B,
and wewill
use the factthat
formulasin
whichall
(translationsof)
proposition letters occur only positively (negatively) are upward (downward) monotone'If
M
is
anytransition
system, then wewrite
M+
to
denotethe
transitionsystem
that
isjust
likeM
exceptthat
it assigns
lMl
to
every proposition letter.Observing
that all
proposition lettersin B
occuronly
positivelyin
p, andthat
all proposition letters in7
occur only negatively in 7, we have, for any transition systemM,
Mfafwul
+
Mlp[wu]
+
M+
=
gWrl
=>
MFITlpl/[ru),
andMftafwu]
=+
Mfty[wu)
+
M+
V
t[-"]
+
M+
V 0[-u]
+
M
f
[rlF')p[r,].
This proves
F
o
++ ITlp'lB, and thelatter
is of the required form.$3.3.
Definability.
In
this
subsection we offer athird
and finalperspec-tive on the expressive power of negation-free modal languages by analyzing which properties of transition systems are definable by a negation-free modal
formula.
Our analysis isin
terms of definable classes of transition systems,and to smoothen the results and the presentation we
will
workwith
so-calledpointed transit'ion systemsl these are structures
of the
form (M,u.,), whereM
is a transition system as definedin
Section 2 andw
e
lMl
isthe
disti,n-guished state of
(M,.). (M,.)
p
/
will
mean the same thing asM,rx
F
d. Bisimulations between pointedtransition
systems are requiredto link
the distinguished states.A
classof
pointedtransition
systemsK
is
negation-free definabte by aset of
formulas
if
there existsa
setof
negation-free formulasA
suchthat
K:
{(M,")
|(M,n)
=
0 for all 0
e
A}.
K is called negation-free definableby
a
singleformula
if
it
is negation-free definableby
meansof
a singletonset.
If
K
isa
class of pointedtransition
systems, wewrite
K to
denote the classof
pointedtransition
systemsthat
arenot
in
K.
We saythat
K
isclosed under ultraproducts (ultrapowers)
if
anyultraproduct
(ultrapower) of transitions systemsin
K is itselfin
K. Likewise, K is closed under directed simulationsif
(M,u.')e K
andZ
:(M,w)
J(N,u)
implies(N,u) e
K.Theorem 3.17
(Definability)
LetK
be a class of pointedtransition
sys-tems. Then
1. K
i,s negati,on-free definable by a set of formulasiffK
is
closed under directed simulations and ultraproducts,whileR
is closed ultrapouers.2. K is
negation-free definable bya
singlefo*4
i,ffK is
closed under directed s'imulations and ultraproducts, whileK
is
closed under ultra-products.Proof. The left-to-right
implications areleft to
the reader.
Forthe
right-to-left
implication ofitem
1, argue as follows.If
K and K satisfy the stated closure conditions, thenboth K
andK
are also closed under bisimulations, and hence, by [t7, Theorem 6.3] they are definable by a set of modal formulas4. Now,
as K is closed under directed simulations, each formula in4
must bepreserved under directed simulations, and hence equivalent
to
a
negation-free modal formula
by
Corollary
3.9.
This
showsthat K
is
negation-free definable.Next, for the right-to-left implication of item 2
we usea similar
argu-ment.
If
K
andK
satisfy the stated closure conditions, thenthey
are bothclosed under bisimulations and ultraproducts.
By
[17, Theorem 6.3], again,this
impliesthat
K is definable by a single modal formulad.
At
K is closedunder directed simulations,
/
must be preserved under directed simulations, and henceit
must be equivalentto
a negation-free modal formulaby
Corol-lary
3.9.
-lThe characterization of definability given
in
Theorem 3.17 is hard to usein
practice as ultraproducts are rather abstract objects. The following givesa more manageable Flaiss6-type characterization.
Let
M,tl
andN,u
be
pointedtransition
systems. We define dtrectedsi,milarity
up
ton
betweenM,u
andN,u
(n e
N
by
requiringthat
there exists a sequence of binary relations Zo, . ..,
ZnC
lMl
"
lNl
suchthat
1.ZnC...q
ZsandwZsu
2.
for eachi
(
n, if
uZit
arrdu
I
P, thenI
I
p3.
fori+7
<
n the back-and-forth properties of Definition 3.1 are satisfiedrelative
to
the indices:(a)
if uZ;afi
andRttt
in
N,
then
there existsu'
e lMl
such thatRuut
andu'Z;t'
(b)
if
uZ;1fi
and Ruut inN,
then there existst'
e
l,n{l suchthat
Rttl
and
u'Z;t'.
we
write
M,u
)n
N,u to
denotethat
there exists a a directed simulation upto
n.Recall
that
the degreed"s(d)
of a modal formula/
is the largest numberof nested modal operators occurring
in
it.
Theorem 3.L8
Assume thatL>p
isfinite
(i.e.,
conta'ins only fini,tely manyproposition letters), and
letK
bea
class of pointed transit'ion systems. ThenK is
negation-free definable bya
singleforrnula
i,ff,for
sonlen €
N, K
isclosed under directed s,imulations up to n.
ProoJ. Clearly,
if
K is negation-free definable by a single formula of degree n,then
it
is closed under directed simulations upto
n.
To prove the converse,let
(M,w)
e
K,
and define4\a,- to
bethe
conjunctionof
all
formulas innf-tp2aQu) of degree at most n
-
as we are workingin
afinite
language, wecan assume
that
there are onlyfinitely
many non-equivalent negation-free formulas of any given degree, hence we may assume Q?ur,.to bea
(finitary) formulain
Lo,n.Using the
finite
character of the language again, wefind
that
there areonly
finitely
many non-equivalent formulas6?t,.
for (M,u.')
e
K.
Let
Qnbe
their
disjunction. Then @' definesK.
For, assumethat
(N,u)
|
@"; weneed
to
showthat
(N,r)
€
K.
First,
from
(N,a)
?
O"
it follows
that
for some (M,tr)
e
K,
(N,r) agrees
with
(M, u.')on
all
negation-free formulasof degree
at
mostn.
Second, thelatter
fact impliesthat
M,w)n
N,u.
Tosee
this,
define relations4e
lMl
x
lNl
for
1<
i
<
n
by
puttinguZltitr
every negation-free modal formula
of
degreeat
most zthat
istrue
at
u,
isalso
true at
l.
Then Zo, . . .,
Zn is a directed simulation upto
n that
linksM,ru
to N,u.
As K is closed under directed simulations up to n, this implies (N,r)
€
K, and we aredone.
-lExample 3.19
The class of pointed models definedby
the first-orderfor-mula
Pr
is closed under directed simulationsup
to
0, and hence definableby a
modal formulaof
degree0.
The
classof
pointed models defined bythe
first-order formula Vy(Rry
-+
3z(RA")) is
not
closed under directedsimulations
up
to
0or
1
(and hencenot
definableby a
modal formula ofdegree less than 2),
but
it
is closed under directed simulations upto
2, andit
is therefore definable by a modal formula of degreeat
most 2.Extensions
The main
ideathat
underliesour work
in
Section3 is a
very simple one:replace the 'symmetric' atomic condition
in
the definition of a bisimulationby a non-symmetric or directed one. Ih this section we apply the same
strat-egy
to
study further negation-free languages arisingin
terminological logic,Since/Until
logic, and feature logic. Our presentationwill
be somewhat im-pressionistic, aimedat
indicating the applicability of the main ideas ratherthan giving
full
details.$4.1-.
Terminological
Logics.
Terminological logics are descriptionlog-ics stemming from semantic networks and designed
for
representingstruc-tured
concepts. The systemKL-ONE
is a well-known knowledgerepresen-tation
system based on terminological logics.In
a terminological logic thestructure of a concept (or set) is described using some or all of the booleans, and various forms of quantification over the attributes of a concept (in terms
of
binary
relations). One of the main concernsin
the area is thecomputa-tional
complexity of reasoning problemsin
terminological logics; althoughthis is closely related to matters of expressive power,
until
recently the latterhas never been studied in a systematic way (see Baader [2]). However, there is a close connection between modal and terminological logics which can be exploited
to
improve on this.Constructor name Svntax Semantics Modal
concept name A
A'CW
ptop T
w
Tbottom
I
gI
conjunction
CND
CIADL
Q A1Pdisiunction (U)
CDD
C'U
D'
0v
4)negation (C)
-Q
W\C'
-4)univ. quantification YR.C {dr lvd2(d1,d2) e
R'
-+ dz eCr)
D6
exist. quantification
(t)
=R.C
{dr
l1d2(d1,d2) eR'
Adz e
Crl
oo
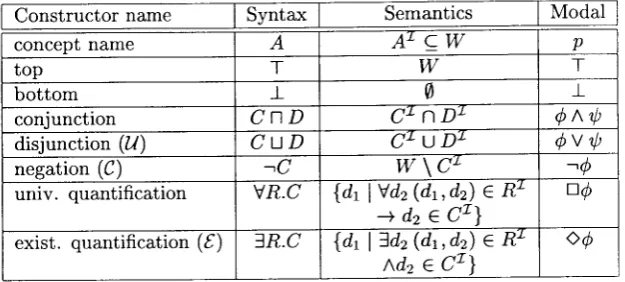
Table
1:
Syntax and semantics of concept-forming constructors.In their
survey paper, Doniniet
al.
[7]study
several hierarchies ofter-minological languages.
By
wayof
example, we considerthe
hierarchy of FL--Iallguieges specifiedin
Table1.
Here, we useA,
B
to
denote atomic concept names ('proposition letters'), and C,D
to
denote complex concepts(,modal formulas'); and we use
R
to
denote roles('binary relations').
T"l
minological expressions are interpreted using on interpretation function
(')/
on
transition
systems (W,R).The
various languages differin
the
constructionsthey admit;
f L-
de-notes
the
languagewith
universal quantification, conjunction andunquali-fied existential quantification
=R.T.
Superlanguages ofFL-
arc identifiedby
strings ofthe
formf
Ll€lvl)lcl-.
we will
assumethat
f L-
contains-[
and
I.
clearly,
f Ltu-
coincideswith
(a multi-modal version) of ournegation-free
modal
language.4e,3, and hence Theorerns3.5,3.L2,3.17,
and
3'18all
carry
overwithout effort
to
f L)l,l-.
Likervise,the
analogous resultson
expressivityfor
the
standardmodal
language,Cj,3 carry
overto
the corresponding terminological languagef L)UC-.
(Further
detailson
thelatter
connection may be foundin
[20,11].)
Thus, two
of
the
languagesin
the
f L-
hierarchy have been equippedwith
model-theoretic tools foranalyzing
their
expressivepower. The
remaining terminological languagesin
Table 1 callfor further
non-standard notionsof
(bi-)simulation; coming [image:17.595.135.448.244.385.2]up
with
such notions and using themto
arriveat
a model-theoretic analysisof the remaining languages
in
Table 1 ispart
of our ongoing work.$4.2.
Since
and
Until.
Our next example concerns directed simulationsfor a
negation-free fragmentof
Since/Until
logic.
Tosimplify
matters werestrict ourselves to the forward looking fragment of the language
that
only contains theUntil
operator[/. Recall
its
truth
definition on transitionsys-tems:
M,w
I
U(d,rlt)
iff
there existsu/ with
M,w'
I
@ andfor all tn",
if
uRtn"Ru'
thenM,w"
=
,!.
Recently,
a
notion of bisimulationsfor
since anduntil
has beenintro-duced
that
allowsfor a
complete developmentof
the
model theoryof
thefull
Since/Until language (see [15]). Building on this, we define the followingsimulations
for
the negation-free forward looking fragmentLu.
A
directedU-simulation
fromM
to
N
is apair (Zo,Zr),
where ZoQlMl
x
lNl
andZr
C
lM2l
"
lN2l
such that1. uZsu
and urI
p
implies u?
p2.
if
u:Zsu andRwwt then
there existsu'
suchthat
Ruut,w'26u,
and(ta,u')21(u,u')
3.
if
(tr,w')Zt(u,u')
anduRu"Ru'then
there existstl"
with
wRu,,Rw,ar'd u" Zgu".
The
first of
the
above clausesis
the
same as before;the
second recordstransitions in simulating pairs of states, and the
third
clause makes sure thatif
two pairs of states simulate each other, thanthey
'agree' on intermediate states.Remark
4.1-In
the definition of directed simulation for4e,g
w€ had back-and-forth clauses to be able to transfer true formulas involving the diamondoperator and its dual the box operator from one model to another. To
sim-plify
matters, we have left out a dualJor the [/-operator from our negation-free fragment of the Since/Until language. As a consequence we can makedo
with
clauses 2 and 3 abovel in the presence of a dual of[/,
we would havcto
add clauses2'
and 3/ goingin
the opposite directions.Here's an example of a directed
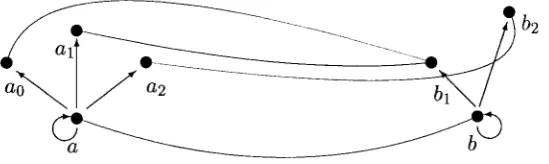
simulation:
consider the modelsMt
:
({o,oo,ar,a2})Rr,Vr)
andM2:
({b,h,bz},Rz,Vz),
where r?1 is{(a,a)}
U{(o,ot)
|0
<, (
n}
and
R2:
{(b,b)}
U{(b,br),(b,b2)};
the valuationsI
and V2 are defined bVW(p):
{ao,at,az},
Vr(q)
:
{oo,ot},
V1(r):
{a1}, and V1(s):
{a};
Vz(p):
{br,bz},
Vz(q):
V2(r)
:
{b1}, and b verifies all proposition letters (see Figure2).
Define Zoe
lMtl x
lM2l byFigure
2:
Directed (/-simulation.Zo
:
{(o,b),
(oo, br), (or,b1), (a2,b2)}.To define ZL
C
lMrl'
,
lMrl',
define apair
of states(r,
y) with
Rry
to
beminimal
if
there are no statesin
betweenr
andy.
Put21 :
{((o, o), (b, b))} U{((.,.'),(r,r'))
|
Rlusto', R2uut and(tr,
-'),
(u,u')
minimal}. We leaveit
to
the readerto
checkthat
(Zs,21)
is a directed U-simulationbetween
M1
andM2
that links
o to b.
It
followsthat
every negation-freeUntil-formula true in
a is also truein
b
but
the
converse obviously fails.It
is precisely the factthat
directed [/-simulationslink
pointsto
points and pairs of points to pairs of pairs of pointsthat
allows to prove analogsof
Theorems 3.5, 3.12, 3.17 and 3.18
for
Lu
by
combining the techniques and resultsin
Section 3with
thosein
[15].$4.3. Feature
Logics.
We conclude ourlist
of extensions of the basicre-sults
in
Section 3with
directed simulations for feature logics. Feature logicsare description languages for a special kind of data structures called feature
structures.
These are relatedto
the
record structures of computer science andthe
framesof artificial
intelligence.In
computational linguistics they are labeled graphs carrying syntactic, semantic, morphological and phoneticinformation,
andthe
purposeof a linguistic theory is
to
describeadmissi-ble graphs
of
this
kind that
underlietext
and speech. Feature structures have also been usedto
characterizepartially
defined concrete data types in programming languages.Formally,
Iet
-L bea
set of feature names) andA
a
setof
sort
names. Thepair
(L,A)
is called a feature signature.A
feature system of signature(L,A)
is a tupleM
:
(D,{Rt}4,{D"}eea),
where for each feature nameI'
fi
is apartial
function onD,
and for each sort name P, Dp is a subset of D.(Feature systems are simply Iabeled
transition
systems of a special kind.) Various logical systems have been proposedto
constrain featurestruc-tures.
Each takes a slightly different view ofits
models,but
often they arenon-boolean fragments
of
modal logics.In this
papel we consider a single example of a feature logic; see Rounds [19] for a survey of feature languages.The
logic we consider is called Kasper-Roundslogic.
Assuming .L and,4. as above, the atomic expressions of
L(KR)
are the following: proposition lettersp
(p€,4),
and so-called path equations 7T:
p, for n, p€
L*.
Complexformulas are
built
up using conjunction, disjunction and modalities(/)
and[/], for
I e
L.t
The only novel aspectin
the interpretation ofL(KR)
is theinterpretation of the path equations and of the indexed modal operators (/).
Path equations are meant
to
expressthat
two sequences of transitions lead to the same state; for convenience, wewill
assumethat
every finite sequenceof feature names 7r comes
with
its owntransition
relation -Rr..c
M,ut
I n:
pif
there existstrl
with
(-,.')
€ R,
n
Rp.(It
it
exists,this
tr'
will
be unique.)o M,ru
=
U)Aif
there exists tuwith
Rluut
andM,rx'
=
Q.
(Again,
if
it
exists, thistll
will
be unique.)Our next aim is to state an analog of Theorem 3.5 for
L(KR).
First wefix
a first-order language
L{R
into which we translate Kasper-Rounds formulas.L{R
has binary relation symbols.RT forI
e
L,
and unary predicate symbolsP
for
all
sort namesp
e
A.
The novel clausesfor
the standard translationST,
are the following:ST"Qr
:
p):1y
(rRn,
i"'
I
Rn.a ArRo,
i"'
i Rp^a),where 7r
:
7Tr...2r,., andp
:
pt...pm,
andall
theni and
p;
are ,atomic'feature names
in tr;
andST,(Q)0:fy(Rtra
ASf y(0)),
and similarly for Itlo.What
kind of simulations are weto
useto
identifyL(KR)
as a fragmentof the first-order language
CfR?
Notethat path
equationsiT:
p areessen-tially
intersections of compositions of 'atomic' transition relations -r?1. Theirintersective character calls for a special kind of simulations
in
which ween-sure
that
intersecting paths are preserved.The
definition below achievesthis by
relating statesto
states and pairsof
statesto
pairsof
states;it
isbased
on
[5] and [13].We
write
u -\
w'for
the
reflexive,transitive
closureof l)1upR1.
Adi,rected KR-si,mulation
ftom
M
to
l/
is a
triple
(Zo,Zt,
22)
whereZs
e
lMl"lNl,
ZrglM2l
x lN2l,
ar'd 22 clN,l"lM,l
such thatI.
uZsu
and tuI
p
implies uI
p2.
(u)
(r,
-')Zr(u,u')
and Rlwutimplies
R1uut.(b)
(r, u')22(tu,trl)
and -Rluul implies RlutrLtt.3.
(a) if uZsu
and Rlwwt then there exists u/with (u,wt)21(u,r')
lOur syntax deviates from the one presented
in
e.g.,[19], but the differences are
inessential.
(b)
if uZsu
arrdRput
then there exists tr.'/with
(u,u')22(ra,w')
4.
(.,-')Zr(u,
u') implies wZgu and w'Zsu'; similarlyfor
(u, u')Z2Qu,u')5.
(a) if (w,w')21(r,r')
and to' -'-+-rt
i+ -',
then there existsu"
suchthat
(Tr.r,,")Zt(r,u")
and (t1",*')Zt(r",r')
(b)
if
(u,u')22(w,u')
andu:+utt
:-+
r.,', then there exists u-," suchthat
(u, u" ) Z2(ta,u."') and (utt, u' ) Z1(-",.'
)Clause 1 is
familiar.
The back-and-forth conditions in clauses 2 and 3 ensurethat
transitions
are recordedin
simulatingpairs
of
states; togetherwith
clause 5 they allow us to simulate intersecting paths in one transition system
with
intersecting paths in the other.Finally
clause 4 is a bookkeeping clausethat
relates the behavior of (Zs,h,
Zz) on pairs of statesto its
behavior on single states.With
this
notion
of
directedKR-simulation
one can proceedto
prove analogsof
Theorems 3.5, 3.12, 3.17 and 3.18for L(KR)
by
combining the techniques and resultsof
Section 3 and[13]. The
details would take us tofar
astrayfrom the
main pointsof the
present paperto
be included here;instead, we refer the reader
to
[16].5
Non-Classical Negation
Although
in
many application areas boolean negationis
unwanted, someform
of
negationis often
calledfor.
This
motivatesthe
introduction
ofnon-classical negations. The
first
examplethat
comesto
mind
is probablyintuiti,onistic negation
In
this section we show how our directed simulations have to be amended for the results of Section 3to
carry over tointuitionistic
logic.
Recall
that
a transition systemM
:
(W,<,
V)
is called an intu'itionist'icmodel
if
<
is a partial
order,and
I/
is a valuation
that
assigns (-closed subsetsofW
to
proposition letters.We assume
that
the language ofintuitionistic
logic hasI,
A, V, and +. Conjunction and disjunction are interpreted in the boolean manner, while -Lis false at all states, and u.r