arxiv: v2 [quant-ph] 19 Apr 2014
Full text
Figure

Related documents
In the first row, where the DM has perfect recall, neither classical nor quantum signals lead to any improvement in the best expected payoff that the DM can achieve.. In the second
To a given entangled state we determine the nearest separable state, calculate the corresponding entanglement witness and the Hilbert–Schmidt measure in the relevant Regions I and
So the description of quantum propositions suggested by the strong analogy between Hamiltonian classical mechanics and geometric quantum mechanics leads to a result that is connected
There is little overlap between this theoretical work and that presented below: (1) we shall not introduce anoma- lous commutators for the creation and destruction operators
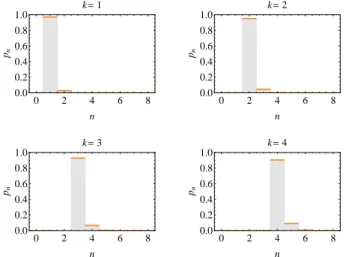
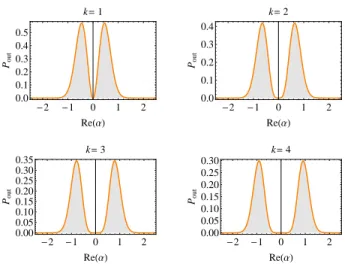
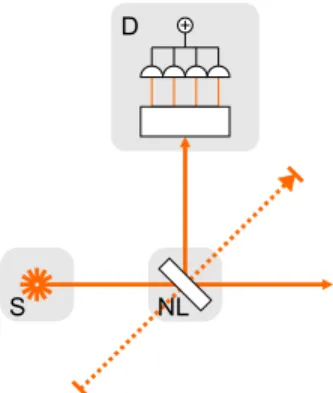
In this letter, we present a theorical scheme to cool-down an initial thermal field to the pure vacuum state through an atomic postselection of a sequence of atoms interacting with
Its special merit is to drive home the lesson that it is still possible to entertain consistently the notion of quantum particles moving on deterministic trajectories if we are
We have constructed for infinite dimensional Hilbert spaces the tomographic sets based on coherent states and Fock states, respectively, and proved decomposition of the
The weakly supervised class saliency maps (Sect. 3.1) encode the location of the object of the given class in the given image, and thus can be used for object localisation (in spite
