6065
Fuzzy Logic Based Lane And Green Time
Selector For Intersection For Smart Urban Traffic
Control
Abhay Rathore, Er. Manish Kaushal, Dr. Sandeep Singla
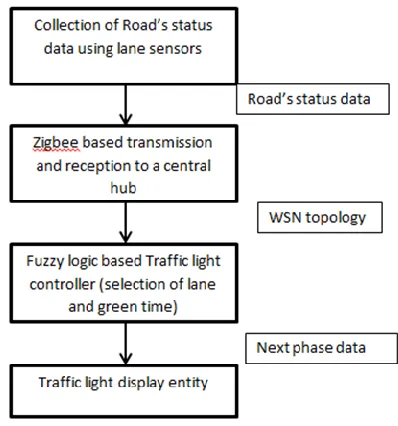
Abstract: With the rapid development of automobile industry, urban traffic congestion is becoming more prominent, effective control of traffic lights has become the most important means of control of traffic management and control of network operation. So, how effective real-time traffic signal control, protection of urban transport efficient and orderly operation of the majority of scholars is a hot issue of concern. Traffic congestion is one of the most critical transportation issues facing us, and it is only predicted to get worse during the next years. However, there are techniques and strategies to help in solving this problem. This objective of this research is to provide a methodology for designing traffic signal controllers with a new approach. This new approach uses fuzzy logic to achieve a more efficient control of traffic signals at intersections using the information and expert knowledge of the system. System constitutes of central hub for decision making, magnetic sensors on each lane for vehicle counting and zigbee transceiver system which sends and receives data from sensors and provides to central hub where data is collected from all lanes and in each round and basis of no. of vehicles and mode of traffic, fuzzy logic based lane selector selects the lane which should be green for coming round and fuzzy logic based green time selector provides the time span for which it should be green. By doing this, there is no loss by empty times and traffic runs smoothly for all the lanes. Present system can be implemented din busy and congested areas to increase the traffic flow.
Index Terms: Smart Urban Traffic control, Fuzzy logic, Green time, Smart transportation etc.
—————————— ——————————
1.
INTRODUCTION
THE knowledge of fundamental traffic flow characteristics is an essential requirement in the design, operation, and improvement of transportation systems [16]. These fundamental characteristics are flow, speed, and density. Traffic flow, q, is defined as the number of vehicles, n, passing some designated highway point in a time interval of duration t, or where q is generally expressed in vehicles per unit time [15]. Speed is defined as a rate of motion, as a distance per unit time, generally in miles per hour (mph) or kilometers per hour (kph) [3].
n q
t
(1)
Flow, average speed, and density are traffic characteristics at the macroscopic level. Headway and spacing are other variables used in traffic flow analysis, but at the microscopic level. Also, corresponding to measures of headway and spacing are two relevant parameters: clearance and gap [3]. Macroscopic and microscopic variables describe different phenomena as illustrated in Table 1 [16]. Headway is the corresponding time between successive vehicles as they pass a point on a roadway. Spacing is defined as the distance between successive vehicles in a traffic stream as measured from front bumper to front bumper. The definition of gap and clearance is similar to headway and spacing respectively. The difference lies in that parameters of clearance and gap are measured from the back bumper to the front bumper of successive vehicles, as depicted in Figure 1. The scope of this research stays at the macroscopic level.
1.1 Traffic Signal Phasing
Phasing is a technique to reduce conflicts between traffic movements at signalized intersections [22]. To eliminate misunderstandings between manufactures and purchasers, the National Electrical Manufactures Association (NEMA) has established phase numbering standards and common graphical techniques for representing phase movements.
Table 1: Microscopic and macroscopic variables of traffic flow [16]
Traffic Characteristic
Microscopic Macroscopic Flow Time headways Flow rates Speed Individual speeds Average
speeds Density Distance
headways
Density Rates
Figure 1: Illustration of the concept of clearance gap, space and headways
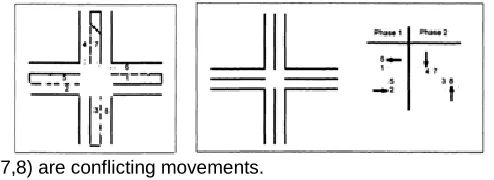
These phase numbering standards are represented graphically in Figure 2. The numbers one through eight indicate each one of the possible movements in a four leg intersection (i.e. through and left-tum movements), excluding right-tum movements. Odd numbers are assigned to the left-tum movements and even numbers are assigned to the through movements. An easy way to remember these numbering is starting with the west bound approach. The ————————————————
Abhay Rathore is currently pursuing masters degree program in department of civil engineering in RIMT University, Mandi Gobindgarh, Punjab, India.
number 1 is assigned to the left-tum movement. Then the numbers 3, 5, and 7 are assigned to the other left-tum movements following a clockwise rotation. Then, the number 2 is assigned to the through movement opposed to movement 1 (east bound) and the other numbers are assigned to the other through movements, also following a clockwise rotation. In this manner it can be observed that the pairs (1,2), (3,4), (5,6), and
(7,8) are conflicting movements.
Figure 2: NEMA Phase Figure 3: Two Phase Operation.
Numbering Standard.
There are many phasing plans (sequences of phases within a cycle) that could be implemented. Two-phase signalization is the most common form in use and is the simplest in concept [17]. As shown in Figure 3, each street of the intersection receives one phase, with all left- and right-turning movements being made on a permitted basis (dotted lines). A permitted movement is one made through a conflicting opposing vehicle flow. Conversely, a protected movement is one made without these conflicts, such as turns made during an exclusive left-tum phase. Hereafter, for simplicity, the right-left-tum movements are not included in any diagram. It should be understood, however, that right-tum movements are allowed. The phasing issue is primarily a left turn issue [20]. As left-turning volumes and opposing through volumes increase, a left-tum phase may be considered. Exclusive left tum phases require that exclusive left-tum lanes be provided [17]. It is important to note that intersections with left turn lanes are not required to have left-tum protected phases. When this happen, turning vehicles do not interfere with vehicles flowing through in the same approach.
1.2 Fuzzy Systems Theory
Fuzzy systems are knowledge-based systems [23]. It is one of the principal branches of fuzzy theory, formally called fuzzy sets theory. Fuzzy theory provides the mathematics and methods necessary to design fuzzy systems. Other branches of fuzzy theory are fuzzy mathematics and fuzzy logic. In fuzzy mathematics, classical mathematical concepts are extended by replacing classical sets with fuzzy sets (sets with a continuous membership function). In fuzzy logic, approximate reasoning is introduced. Fuzzy systems include many research fields, from which one of them is fuzzy control. This is the field of interest in this research. It is important to understand that all the branches mentioned above are not independent from one another. There exist strong interconnections between them. For example, fuzzy control uses concepts from fuzzy mathematics and fuzzy logic. This is the reason why fuzzy control is often referred to as fuzzy logic based control.
Figure 4: Illustration of (a) Triangular (b) Gaussian and (c) Trapezoidal Membership Functions.
Figure 5: Linguistic Values for Linguistic Variable “Temperature”.
A fuzzy set A is characterized by a membership function which associates each element x e X with the degree of membership of x in A, fiA(x). There are many possible membership functions to describe a particular fuzzy set. For example, Figure 4 shows three different types of membership functions that could be used to describe numbers close to zero. These are (a) triangular (b) gaussian and (c) trapezoidal membership functions. The Fuzzy Logic Toolbox from MATLAB® includes 11 built-in membership function types. The type of membership function used to describe a particular fuzzy set should be selected considering its simplicity, convenience, speed, efficiency, and how well it represents the fuzzy set [11].
1.3 Linguistic Variables and Fuzzy Logic
A linguistic variable, in simple terms, is a variable whose values are words or sentences in a natural language. For example, Temperature could be a linguistic variable if its values are linguistic instead of numerical, i.e. HOT, WARM, and COLD instead of 90, 85, and 50 degrees Fahrenheit. Figure 5 shows examples of corresponding membership functions. The concept of a linguistic variable provides a mean of approximately describe phenomena which are too complex to be described in conventional quantitative terms [25]. Treating truth as a linguistic variable with values such as true, very true, not very true, untrue, etc., leads to what is called fuzzy logic. Logic is the study of methods and principles of reasoning, where reasoning is obtaining new propositions from existing propositions [23]. Fuzzy logic provides a basis to approximate reasoning ', a reasoning which is not exact nor very inexact [25]. In classical logic, the propositions are required to be true or false. In other words, the truth value of a proposition is either 1 or 0. In fuzzy logic, the truth values of the propositions are any number in the interval [Q0,1] and they are called fuzzy propositions.
2
EXISTED
WORK
6067 has been compared with the fuzzy logic controller (Zhang et al.
2005) and the fixed time controller for three-phased controlled intersections with respect to average delays. The proposed controller has been tested in two cases: with different and equal traffic volume levels at each approach. The results of the experiments indicate that the proposed approach can provide effective real-time traffic signal control at individual isolated intersections with varying traffic volume level. The simulation showed that proposed signal controller is better when traffic volumes are high. When traffic streams are low or close to medium, the results are almost the same as with the fuzzy logic controller. Chiou et al.[5] (2013) Summarizes an SGFLC model for signal control for both isolated and sequential intersections with the MCTM traffic behavior modeling. They choose traffic flow and queue length as state variables, extension of green time as the control variable, and total vehicle delays as performance measurement. The validation results of the MCTM demonstrate its capability in replicating the mixed traffic behaviors at the signalized intersection. As to the control performance, under different levels of details of state variable measurement, the proposed SGFLC model can perform better if more detailed levels of state variables are considered. Yan et al. [24] (2014) provides real-time traffic flow forecasting, reliable traffic information and dynamic traffic information to traffic control, real-time data obtained provide the best signal timing plans and splits the phase under different circumstances; choose based on typical road traffic control variables, the lights intelligent control system design based on fuzzy theory. MATLAB simulation results show that a reasonable design, effectively, to a certain extent, improve the traffic conditions, has some practical significance to better improve traffic efficiency, solve environmental pollution and traffic safety due to the congestion caused by other issues. Geng et al. [9] (2015) developed a SFM for a traffic light control problem with two coupled intersections, based on which we derive an IPA gradient estimator of a cost metric with respect to the green and red cycle lengths. The estimators are used to iteratively adjust light cycle lengths to improve performance and, under proper conditions, obtain optimal values. The analysis in the paper can be readily extended to N intersections in tandem. Dogan et al. [7] (2016) focused on optimization of FLC triangle MFs for different traffic volumes via DE. In order to calculate the green time and extension time of the traffic movement phase, a FLCRTL was developed to control an intersection. It was optimized and tested with nine different traffic scenarios based on traffic volumes and approach rates. The results show that DE significantly reduced a-dv values in all the prescribed scenarios. Thus, DE can be an effective tool to optimize FL traffic control systems. Jina et al. [12] (2017) introduces an innovative intelligent group-based traffic signal control system, FITS. The system is implemented on a single board computing device capable of applying its own control logic and taking over the decision by communicating with modern traffic signal controllers. Due to the economic and technical barriers in upgrading the signal control system based on the current architecture, the FITS system provides a great opportunity to improve the existing signal control system without changing the fundamental traffic management infrastructure. The critical capability of FITS lies in the principles of sensing and human-like reasoning as a
group based process. Using such an approach, the system has been successfully tested with an external open source traffic simulator, SUMO. Li et al.[14] (2018) proposes the concept of Left-Hand Traffic (LHT) arterial, on which vehicles drive on the left-hand-side as in England and India. The unconventional intersection where a LHT arterial intersects with a Right-Hand Traffic (RHT) arterial is named as the symmetric intersection. Experiments show that the symmetric intersection can obtain greater capacity and shorter cycle length than the conventional intersection. The symmetric intersection is an unconventional design which never be proposed before. Hartanti et al. [10] (2019) used a Fuzzy Mamdani logic to optimize traffic light control at intersections. The duration or green light period for each row can be optimized based on several real-time parameters, such as queue length in each row, number of vehicles going to the queue, vehicle speed, and width of each lane. The duration of the green light in each row may be different, based on the conditions on each path. Lines with longer lines can get longer green periods than other lines with fewer vehicles. The green light application period must reduce traffic congestion. In the graph, how to use data on the data of fuzzy mamdani calculations in this application can be seen when the green light can vary several tens of seconds, in contrast to our previous research that uses the help of infrared sensors placed in each intersection path and the use of greedy algorithms to help accelerate the duration of movement the green light for the required path, but can only add two seconds to the green light. With this research is expected to reduce the stack of vehicles to prevent traffic congestion, especially at intersections. Sabir et al.[21] (2019) observed from the obtained results that system becomes efficient on using dynamic traffic control system. The image processing makes the implementation even more reliable reducing the hardware and maintenance up to a large extent and increasing the life of the system. This project can be further improved by deploying a number of traffic squares and connecting them and the controller (FPGA) using the concept of IoT. Additionally the data from the traffic squares can be uploaded on cloud for required analysis. The image processing can be improved by identifying each vehicle which will in turn help in checking if the rules and regulations are being followed or not.
3
PROBLEM
FORMULATION
solved by using a controllable sensor network in which traffic density evaluation can be carried by the input from wireless sensors provided on road ways. To work the system effectively a real input has been needed from different sensors which can fed it to main control routing hub using Zigbee sensors. As Zigbee uses battery power, an effective and time limiting algorithm can be used to get the green time based on no. of vehicles on a particular lane. This can be possible with a number of RFID sensors which can communicate to a central hub through wireless sensor network. In this work, we will propose a wireless topology to simultaneously communicate different sensors in real time and to provide signal to traffic lights according to the traffic density. Different topologies i.e. star. Mesh etc. topologies can be used for communication and ultrasonic sensors etc. can be used to get the traffic density. The problem of designing the pre-timed signal timing plan for the group of intersections could be formulated in the following way: For the defined signal phasing at each intersection, determine the cycle length, the green time lengths for every intersection and the offsets in such a way to minimize the total travel time of all network users travelling through the signalized intersection.
4
PROPOSED
WORK
In this work a standard four lane traffic will be considered as shown in Figure 6. The Figure 7 shows the proposed methodology of research work.
Figure 6: Standard four-leg intersection [1]
4.1 Development of the Fuzzy Model for a Traffic Signal Control System
Figure 8 presents the steps involved in the development of a fuzzy model. The first two steps are done simultaneously. First, the input and output variables of the controller will be defined. Then, they will be interpreted as linguistic variables and fuzzy sets will be defined to describe the different linguistic terms assigned to each one of them. These linguistic terms are the values that the linguistic variables can take. With the intention to model a traffic control system, the possibilities for selecting input variables are many. They could be queue of vehicles in the approaches with red light and arrivals of vehicles in the approaches with green light [8].
Figure 7: Work methodology
Another possibility is the average density of traffic behind each green light and each red light, and the length of the current cycle time [2]. Also, cars behind red light, cars behind green light, and cycle time [13]. Although the inputs are different in all these applications, they have some things in common. It seems that the important measurements to be taken are the amount of traffic in all the approaches of the intersection and the elapsed time. Time is an important input variable because it is not desired to have a phase with a red light (green light) for a time too long or too short.
Figure 8: Steps Involved in the Development of a Fuzzy Model [6]
6069 recommendations given in [6]. To select appropriate
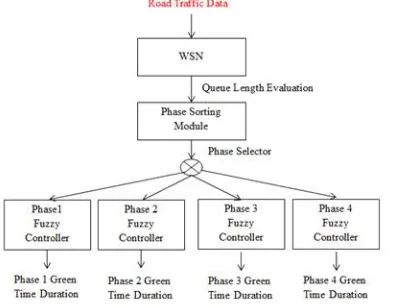
membership functions to represent these linguistic values, there are many options It is possible to use triangular, trapezoidal, gaussian or sigmoidal membership functions [11] or combinations of them, just to mention a few. It was decided to use triangular membership functions to represent all fuzzy sets. This decision is based on the properties of triangular membership functions which were established in [18]. the architecture of proposed system is shown in Figure 9.
Figure 9: Different components of the proposed traffic fuzzy controller
5
RESULTS
AND
ANALYSIS
The design of the proposed system was built using Matlab/Simulink’s fundamental components. In Simulink, the reliable complex modulation schemes can be designed cost effectively and efficiently. In this, the FLC has been designed and simulated for the selection of the lane for which the green signal needs to be on at a particular time. The figure 10 shows the membership functions for the required value of output i.e. the duration for green signal. Here, the assumption is considered that the minimum value of green signal time should be 15 seconds and no more than 60 seconds as maximum time for the green signal. So, for instance, in the case of Phase 1, Controller 1 will determine the green light duration by processing the queue length of the Lane 1 of Road A and that of the Lane 1 of Road C, respectively. Similarly, Controller 2 will determine the green time duration by processing the queue length of the Lane 1 of Road B and that of the Lane 1 of Road D, and so on. The fuzzy controller works in three steps. During the first step, called fuzzification, the input variables relevant to the two queue length values are converted from their analog value to a crisp value characterized by a certain degree of membership, from 0% to 100. In Figure 12 the membership function of the input variables of the fuzzy logic controller are depicted.
Figure 10: Fuzzy logic designer for lane selection
The second step of the proposed approach is described by an mechanism of interference by which the information that is fuzzified is interrelated based on a linguistic methodology of IF-THEN construct. If both the lanes of a phase are congested, i.e., their queue length is LONG, the phase needs the maximum green time duration in order to reduce the queues. On the contrary, if at least one of the two lanes is characterized by a NORMAL queue length, it is not advisable to allot the maximum green time duration to that phase. Actually, the red light of all other phases is prolongs by the duration of green time of a particular phase then there could be a phase that swould be unreasonably penalized. The last step of the fuzzy logic controller is represented by the defuzzification. In this, the controller finds a single output value from the available solutions of the fuzzy space. This output value i.e. crisp in nature is used to represent the duration of green light for the ith phase of the controller of traffic lights. The center of gravity method is used to perform the defuzzification as given by the Eq. (2).
1
1
* n
i i
i
ith n
i i
O C G r e e n T im e D u r a tio n
O
(2)
In the above equation, Oi specifies the output of the base rule
ith and Cirepresents the midpoint of the output membership
function. In the proposed approach, the time duration of yellow light is fixed because it doesn’t allow to cross the intersection despite of condition that unless the crossing have already initiated during the green signal. In case if the phase i has the green signal, then any other phase i.e. jimust have the red
The simulation has been provided by creating four lights in Simulink which takes red, yellow and green status from the outcome at each iteration as shown in Figure 11. Enumerated data has been used for three red, green and yellow signals. Enumerated data is data that is restricted to a finite set of values. An enumerated data type is a MATLAB® class that defines a set of enumerated values. Each enumerated value consists of an enumerated name and an underlying integer which the software uses internally and in generated code.
Figure 11: Number of vehicles in four lanes during simulation
Figure 12: Animated traffic light control in simulink
The numbers of cars are counted by magnetic sensors placed in the road which senses the ferrous material passes above it. These Sensors act as a counter which counts up when a vehicle pass above it. Similarly other sensors can be placed on the sides of the streets which give status of number of vehicles to the centralized control.
Table 2: Number of vehicles exit in each street Street- Number
Street-two
Street-four
Street-one
Street-three Number of
vehicles exit
804 935 908 938
6
CONCLUSION
The rising growth in development and design of the artificial intelligent systems with the ability to adapt number of
parameters in real time environment is continued to emerge. In such kind of systems, the traffic lights are designed to accurately be adjusted as per the traffic by itself at any given time including both peak and off peak time periods. To successfully run these things in real time systems, a sensor acquisition is required that can perform the calculations of required time of green signal along with the lane selection for which the vehicles need to be allowed to pass to other direction. In the proposed work, two new fuzzy logic controllers are proposed. The first controller is used for selecting the particular lane for a four cross intersection road and second controller is used to estimate the time required for that particular lane based on the number of vehicles that are currently present in that corresponding lane. For this system, the signals are fed into the central hub by using the WSN via the Zigbee based transceiver. Here, the entire simulation setup of Zigbee is prepared in MATLAB that basically shows the working of transmitter and receiver as per the Zigbee device. Therefore this proposed work recommends a new innovative system that can integrate number of technologies like fuzzy logic control and WSN in a unique manner to get a lightweight but efficient way out for controlling the traffic light and it is proven from the results that it can provide better performance as compared to other methodologies presented in the literature. It can be clearly seen form the simulation results obtained in this research work that the proposed approach outperforms in terms of reduction in the waiting time of vehicles specially, when there is heavy traffic. Furthermore, the approach of fuzzy controller is proven to be very effective for balancing the waiting time of vehicles among all the four phases, even when there is unbalanced arrival rate in the phases. The proposed designed system clearly fulfills all the targeted challenges of design, i.e., scalability, flexibility, low cost, and lightweight computation.
REFERENCES
[1] Ascia, G., Ficili, G., & Panno, D. (1995). Design of a VLSI fuzzy processor for ATM traffic sources management. In Proceedings of 20th Conference on Local Computer Networks (pp. 62-71). IEEE
[2] Bisset, K. R., & Kelsey, R. L. (1992). Simulation of traffic flow and control using conventional, fuzzy, and adaptive methods (No. LA-UR-92-1157; CONF-9206165-1). Los Alamos National Lab., NM (United States).
[3] C. Jotin Khisty (1990). Transportation engineering an introduction. Englewood Cliffs, N.J Prentice Hall
[4] Chiang, T. C., & Wang, W. J. (2011). Highway on-ramp control using fuzzy decision making. Journal of Vibration and Control, 17(2), 205-213.
[5] Chiou, Y. C., & Huang, Y. F. (2013). Stepwise genetic fuzzy logic signal control under mixed traffic conditions. Journal of advanced transportation, 47(1), 43-60.
[6] Cox, E. (1992). Fuzzy fundamentals. IEEE spectrum, 29(10), 58-61.
[7] Doğan, E., & Akgüngör, A. P. (2016). Optimizing a fuzzy logic traffic signal controller via the differential evolution algorithm under different traffic scenarios. Simulation, 92(11), 1013-1023.
6071 Second IEEE International Conference on Fuzzy
Systems (pp. 506-511). IEEE.
[9] Geng, Y., & Cassandras, C. G. (2015). Multi-intersection traffic light control with blocking. Discrete Event Dynamic
Systems, 25(1-2), 7-30.
[10] Hartanti, D., Aziza, R. N., & Siswipraptini, P. C. (2019). Optimization
of smart traffic lights to prevent traffic congestion using fuzzy logic. Telkomnika, 17(1), 320-327.
[11] Jang, J. S. R., & Gulley, N. (1995). Fuzzy logic toolbox user’s guide. The Mathworks Inc, 1(995), 19.
[12] Jin, J., Ma, X., & Kosonen, I. (2017). An intelligent control system for traffic lights with simulation-based evaluation. control engineering practice, 58, 24-33.
[13] Kaur, D., Konga, E., & Konga, E. (1994). Fuzzy traffic light controller. In Proceedings of 1994 37th Midwest Symposium on Circuits and Systems (Vol. 2, pp. 1507-1510). IEEE.
[14] Li, X. (2018). The symmetric intersection design and traffic control optimization. Transportation Research Part C: Emerging Technologies, 92, 176-190.
[15] Mannering, F., Kilareski, W., & Washburn, S. (2007). Principles of highway engineering and traffic analysis. John Wiley & Sons.
[16] May, A. D. (1990). Traffic flow fundamentals.
[17] McShane, W. R., & Roess, R. P. (1990). Traffic engineering.
[18] Pedrycz, W. (1994). Why triangular membership functions?. Fuzzy sets and Systems, 64(1), 21-30.
[19] Pranevičius, H., & Kraujalis, T. (2012). Knowledge based
traffic signal control model for signalized intersection. Transport, 27(3), 263-267.
[20] Rodriguez, E. (1995). Traffic Signal Control Based on Fuzzy Logic, M.S.E.E. thesis, University of Puerto Rico, Mayagiiez Campus.
[21] Sabir, A., Jain, A., Nathwani, Y., & Neema, V. (2019, July). Intelligent Traffic Light Controller: A Solution for Smart City Traffic Problem. In International Symposium on VLSI Design and Test (pp. 764-772). Springer, Singapore. [22] United States. Federal Highway Administration.
(1985). Traffic control systems handbook. Rev. Apr. 1985. [Washington, D.C.]: The Administration.
[23] Wang, L. X., & Wang, L. X. (1997). A course in fuzzy systems and control (Vol. 2). Upper Saddle River, NJ: Prentice Hall PTR.
[24] Yan, X. B. (2014). Research of traffic signal control strategy based on the fuzzy control. In Applied Mechanics and Materials (Vol. 651, pp. 486-490). Trans Tech Publications.
![Table 1: Microscopic and macroscopic variables of traffic flow [16]](https://thumb-us.123doks.com/thumbv2/123dok_us/8643652.1433360/1.612.319.573.437.623/table-microscopic-macroscopic-variables-traffic-flow.webp)