Formal Modeling and Verification of Context-Aware
Systems using Event-B
H
Hong Anh Le
1,∗, Ninh Thuan Truong
21Hanoi University of Mining and Geology, Duc Thang, Bac Tu Liem, Ha Noi, Viet Nam
2VNU - University of Engineering and Technology, 144 Xuan Thuy, Cau Giay, Ha Noi, Viet Nam
Abstract
Context awareness is a computing paradigm that makes applications responsive and adaptive with their environment. Formal modeling and verification of context-aware systems are challenging issues in the development as they are complex and uncertain. In this paper, we propose an approach to use a formal method Event-B to model and verify such systems. First, we specify a context aware system’s components such as context data entities, context rules, context relations by Event-B notions. In the next step, we use the Rodin platform to verify the system’s desired properties such as context constraint preservation. It aims to benefit from natural representation of context awareness concepts in Event-B and proof obligations generated by refinement mechanism to ensure the correctness of systems. We illustrate the use of our approach on a scenario of an Adaptive Cruise Control system.
Receivedon 19 October 2014;acceptedon 28 November 2014;publishedon 16 December 2014
Keywords: context awareness, refinement-based modeling, verification, Event-B
Copyright © 2014 Hong Anh Le and Ninh Thuan Truong, licensedto ICST. This isan open access article distributed under the terms of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/), whichpermitsunlimiteduse,distributionandreproductioninanymediumsolongastheoriginalworkisproperlycited. doi:10.4108/casa.1.2.e4
1. Introduction
Context awareness is a computing paradigm that makes applications responsive and adaptive with their envi-ronment. Context-aware systems potentially determine their behavior and reduces human-computer interac-tion by providing knowledge context informainterac-tion of their user’s environment. Context awareness of an application relates to adaptation, responsiveness, sensi-tiveness of the application to changes of the context [4]. In a narrow view, a context-aware system is somehow considered as an event-driven system, i.e. it receives events emitted by context changes and responds to these changes with the providing context knowledge.
Context-aware systems often use context rules to adjust the behavior if the circumstances are changed. Furthermore, the behavior of context-ware systems is often complex and uncertain. That could be unacceptable especially when context-aware systems are implemented as safety-critical systems. The results up to date have worked on modeling context awareness
HThis is the extended version of the paper published in ICCASA 2013 ∗
Corresponding author. Email:[email protected]
with various approaches such as object role modeling, ontology based modeling, logic based modeling [4,
17]. They also have proposed several frameworks for context modeling. However, to the best of our knowledge, there does not exist an approach that models context awareness in several aspects such as events of environments, context rules and uncertainty.
provided for Event-B specification and proof in the Rodin platform.
In this paper, we propose to use Event-B as a formal method to model and verify context-aware systems. Event-B is a well-suite method for modeling such sys-tems in comparison to others formal methods. The contributions of our proposal are: (1) Natural represen-tation of context-aware systems by Event-B concepts. A set of translation rules are proposed to define context awareness components formally. It is a refinement-based method allowing to construct the system grad-ually (2) After formalization, significant properties are verified via proof obligations of refinement mechanism automatically (or interactively) without any intermedi-ate transformation.
The rest of the paper is structured as follows: Section 2 provides some background of Context awareness and Event-B. In Section 3, we introduce an incremental approach to model a context-aware system by formalizing its components using Event-B notations and making use of its refinement. Section 4 presents a scenario of an Adaptive Cruise Control system in order to demonstrate our approach. Section 5 summarizes some related works. We conclude and provide future works in Section 6.
2. Backgrounds
As we use Event-B notation to formalize context-aware systems, in this section, we introduce briefly some background of Event-B and context awareness.
2.1. Event-B
Event-B [2] is a formal method for system-level modeling and analysis. Key features of Event-B are the use of set theory as a modeling notation, the use of refinement to represent systems at different abstraction levels and the use of mathematical proof to verify consistency between refinement levels . A basic structure of an Event-B model consists of MACHINE and CONTEXT.
An Event B CONTEXT describes a static part where all the relevant properties and hypotheses are defined. A CONTEXT consists of carrier sets, constants, axioms. Carrier sets, denoted by s, are represented by their names, and are non-empty. Different carrier sets are completely independent. The constantscare defined by means of a number of axiomsP(s,c) also depending on the carrier setss.
A MACHINE is defined by a set of clauses. A machine is composed of variables, invariants, theorems and events. Variablesvare representing states of the model. Invariants I(v) yield the laws that state variables v must always be satisfied. These laws are formalized by means of predicates expressed within the language of First Order Predicate Calculus with Equality extended
by Set Theory. EventsE(v) present transitions between states. Each event has the formevt= anyxwhereG(x,v) then A(x,v,v0) end where x are local variables of the event, G(x,v) is a guard condition andA(x,v,v0) is an action. An event is enabled when its guard condition is satisfied. The event action consists of one or more assignments. We have three kinds of assignments for expressing the actions associated with an event: (1) a deterministic multiple assignment (x:=E(t,v)), (2) an empty assignment (skip), or (3) a non-deterministic multiple assignment (x:|P(t,v,x0)).
To deal with complexity in modeling systems, Event-B provides a refinement mechanism that allows us to build the system gradually by adding more details to get more precise model. A concrete Event-B machine can refine at most one abstract machine. A refined machine usually has more variables than its abstraction as we have new variables to represent more details of the model. In superposition refinement, the abstract variables are retained in the concrete machine, with possibly some additional variables. In vertical refinement such as data refinement, the abstract variables v are replaced by concrete ones w. Subsequently, the connections between them are represented by the relationship between v and w, i.e. gluing invariantsJ(v,w).
In order to check if a machine satisfies a collection of specified properties, Event-B defines proof obligations (POs) which we must prove. Some of the proof obligations relevant to discussion here are invariant preservation (INV). INV PO means that we must prove that invariants hold after event’s execution. The proof obligation is as folows: I(v),G(w,v),A(w,v,v0)`I(v0),
where I(v) is invariant, G(w,v) is guard of the event, A(w,v,v0) is assignment clauses of the event.
2.2. Context-aware systems
three different approaches to achieving contextual data as follows
• Direct sensor access: The systems directly gather contextual data from built-in sensors. This approach does not require any additional layer but it is just suitable for simple cases not for distributed systems.
• Middle-ware infrastructure: It introduced layered architecture to separate business logic and user interfaces of the system. The system is extensible because it does not have to modify if sensors access changes.
• Context server: It allows multiple clients to use same resources. This approach is based on client-server architecture. Collected contextual data is stored in a so-called context-server. Clients use appropriate network protocols to access and use this data.
Figure 1.
A layered conceptual framework for
context-aware systems [
7
]
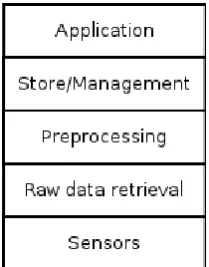
Figure1 illustrates a layered conceptual framework for context-aware systems. The first layer consists of physical or virtual sensors which are able to capture context data from the environment. The second layer is able to retrieve data from sensors using providing API. Before storing the data in the fourth layer, it can be preprocessed in the third layer which is responsible for reasoning and interpreting contextual information. Finally, the application layer actually implementing reactions to different events which are raised by context changes.
In this paper, we focus on a context-aware system which directly use contextual data from physical sensors. The system senses many kinds of contexts in its working environment such as position, acceleration of the vehicle and/or temperature, weather, humidity, etc.. Processing of the system is context-dependent, i.e it react to the context changes (for example: if the temperature is decreased, then the system starts
heating). The system’s behavior must comply with the context constraints properties (for instance: the system does not start heating, even though the operator executes heating function when the temperature is very high).
3. Formalizing context awareness
In this section, we consider a simplified context-aware system and represent its components in set theory. Base upon these definitions, we then use Event-B notations to formalize a context-aware system.
3.1. Set representation of context awareness
Firstly, we introduce a simple structure of context-aware systems consisting of five components depicted in Figure 2. A basic operation of the system is that if there is any change from the environment that can be detected using sensors, it sends events to the core context-aware service. This component then uses both context data entities and context rules to reason about the situation. Finally, it reacts to environment via its behaviors. During that process, the system still has to preserve the constraints.
Context data
Environment Context−aware service events
react
Context constraints
Context rules
Figure 2.
A simple context-aware system
Definition 1(Context-aware system).A context-aware system is denoted by a 4-tuple, CaS=hE,R,CD,CCiwhere E
and R represent for the environment events and context rules respectively, CD denotes context data entities and its relations andCCstates the system’s constraints.
Definition 2 (Environments).Environment is a set of events stated by a set:E={e}, where e is an event that is sent to
context aware core service.
We go further for definitions of context rules and context entities. Let us assume that rules of context-awareness are in the form of ECA (event-condition-action), i.e. if an eventeoccurs in conditionCthen do actionA. Hence, we present definitions for each element r,r∈Ras follows
Table 1.
Modeling a context rule by an Event-B Event
IF (
e
)
ON (
c
)
WHEN (
e
∧
c
)
ACTION (a)
THEN (a) END
systems. It specifies the response actions when a specific event is raised at any condition. Thus, the context rule is denoted by 3-tuple r=he,a,ci, where e,c are event
and condition of the rule respectively, while a states the action of the rule. Note that, the eventeshould be included in the event setE.
Context data consists of context entities and their relations. This component takes a role as a data storage of the system.
Definition 4(Context data).Context data is denoted by a 2-tuple CD=hE,Ri, where E is a set of context entities
and R is a set of functions mapping between sets of context entities.
3.2. Modeling context-aware system
Event-B is based on classical set theory, we thus use it to model context-aware systems according to definitions given in Subsection 3.1. We present transformation rules between a context-aware system and an Event-B model as follows:
• Rule 1: Context data is presented by a set of context entities and their relations. The context entities be treated as a collection of sets and constants. Recall that, an Event-B context consists of set, constant and axioms clauses. The axioms clauses list various predicates of constants in the first order logic formulas. Hence, we can formalize directly a context data by an Event-B context.
• Rule 2: Each event that is emitted by the environment component is represented by an Event-B event. For example: A context-aware system uses a sensor for detecting Wind speed. The sensor regularly detects the environment and this event is sent to the core service. Then, it is then formalized by an event:detectWind.
• Rule 3: Since context rule structure has the form of ECA, each rule r=he,a,ci is mapping to an
Event-B event. Where e is event that the system senses or received from its environment, c is the additional conditions for reasoning. More precisely, conjunction of e and c are guards of Event-B event whileais mapped to the body of the event (see Table1). All these events are included in either Event-B abstract machines or a refined ones.
• Rule 4: A constraint of the context-aware system is a desired property that the system should maintain. That standpoint matches to the meaning of Event-B invariants, we thus model Context constraints by a set of invariants.
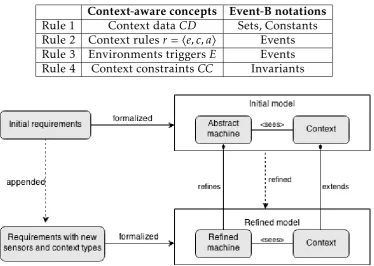
We summarize transformation rules used for model-ing in Table2
3.3. Incremental modeling using refinement
In fact, the development of context-aware systems often starts from the scratch requirements, then it is built gradually when we have new requirements about context entities and reasoning. For example, more sensors are attached in the system to get various kind of context data. The system also has more context rules to handle with these data. The updated system still has to satisfy context constraints which has been established. Therefore, it requires to have a suitable modeling method for incremental development. As we have described in Subsection 3.2, a context-aware system is translated to an abstract Event-B model. It is apparently suitable for modeling the initial stage of a context-aware system. In this subsection, we answer the question how our approach fits to incremental development of such systems.
The refinement mechanism of Event-B makes it pos-sible to model context-aware systems incrementally. We already know that Event-B provides both superposition refinement and vertical refinement. In the former, the abstract variables are retained in the concrete machine, with possibly some additional variables, hence it is suitable for modeling a context-aware system which is often extended by adding new sensors.
• Static part: For example, when a new sensor is added to the system, we may have to deal with new context data types. The context data can be an extension of the old one. Applying Rule 1, we formalize it as a new Event-B context which extends the ones in abstract model.
Table 2.
Transformation between context-aware systems and Event-B notations
Context-aware concepts
Event-B notations
Rule 1
Context data
CD
Sets, Constants
Rule 2
Context rules
r
=
h
e
,
c
,
a
i
Events
Rule 3
Environments triggers
E
Events
Rule 4
Context constraints
CC
Invariants
Figure 3.
Incremental modeling using refinement
can be achieved by using INV proof obligations which states that invariant preservation PO can be checked at any refinement. According to Rule 4 in Section 3.2, all constraints are represented by Invariants, therefore a new constructed context-aware system at any refined step preserves all constraints of the initial step.
The proposed incremental modeling method is illustrated in Figure3.
4. A case study: Adaptive Cruise Control system
We demonstrate our approach by modeling a scenario of an Adaptive Cruise Control (ACC) system. First, we introduce the scenario, then we apply the modeling method presented in Section 3.2 and then we verify context constraint preservation properties of the system.4.1. Initial description
ACC controls car’s speed is based on the driving conditions which are enhanced with a context-aware feature such as target detection. The ACC system use a sensor to detect target in front of the car. The car has a maximum speed which is initially set to a value. If the car does not detect a target then ACC increase the speed, other wise decreases the speed with constant amount. If
the car is stopped and there is no target detected then it is resumed with initial speed.
The ACC must conform to a context constraint such that the speed is always in safe range, i.e the speed is less or equal to the maximum speed.
4.2. Modeling ACC system
In this scenario, there are three sensors, following the approach presented in Section3, we specify the initial system with one abstract machine and one context, namelyACC M0 andTarget.
• Applying Rule 1, contextTargetrepresents context data received from the target detection sensor. More precisely, the information sent by the sensor let us know whether there is an object which is currently in front of the car. We thus formalize the context entities as a setTARGET DETECTION which is equivalent toBOOLset.
• The sensor will periodically send context data to the system by emitting events. We need to check if context data contains the information of obstacle objects. Hence, we specify two Event-B events TargetDetected,TargetUndetectedcorrespondingly.
attract three rules from the initial description and translate them to three corresponding events following Rule 3.
• Applying Rule 4, the context constraint is translated to invariantCXT CSTR.
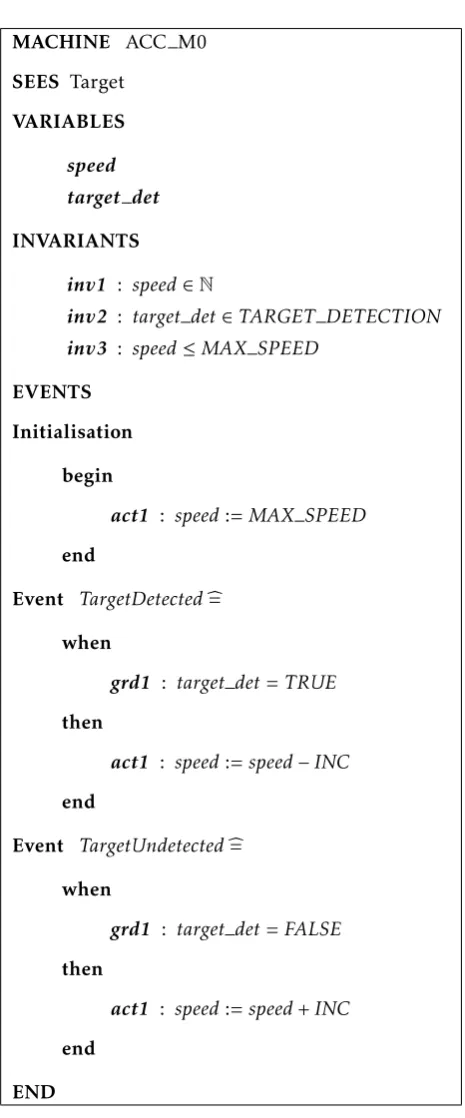
Moreover, a variablespeedin the model specifies the speed of the car. The abstract context and abstract machine Event-B specification of the ACC system are partially illustrated in Figure 4 and Figure 5 respectively.
CONTEXT Target
CONSTANTS
TARGET DETECTION MAX SPEED
INC
AXIOMS
axm1 : TARGET DETECTION=BOOL axm2 : MAX SPEED∈N
axm3 : INC<MAX SPEED axm4 : INC∈N
END
Figure 4.
Abstract context of initial ACC system
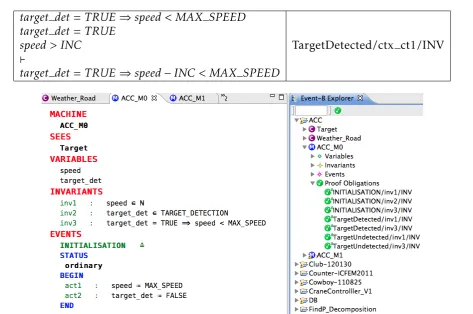
Strengthen guards: With the initial description, the generated INV POs of the translated Event-B model are failed to prove. More precisely, with event TargetDetected, PO TargetDetected/CXT CSTR/INV is generated as follows:
speed<MAX SPEED∧target=FALSE`
speed+INC SPEED<MAX SPEED
It is failed if MAX SPEED+INC SPEED<speed<
MAX SPEEDbefore event execution.
To make the model more precise, we strengthen the context rules by adding more conditions. i.e. the event guards have more clauses (Figure6)
4.3. Refinement: Adding weather and road sensors
At this stage, the system has more sensors to be aware more precisely of the current context situations. Weather and road sensors are attached to the system. Similarly to target detection sensor, they send the context data periodically to the system. Context rules of the system are also extended for reacting to new added sensors as follows: “When a car travels in a raining condition or sharp bend, ACC reduces car’s speed". With new sensors, the system need to fulfil
MACHINE ACC M0
SEES Target
VARIABLES
speed target det
INVARIANTS
inv1 : speed∈N
inv2 : target det∈TARGET DETECTION
inv3 : speed≤MAX SPEED
EVENTS
Initialisation
begin
act1 : speed:=MAX SPEED
end
Event TargetDetectedb=
when
grd1 : target det=TRUE
then
act1 : speed:=speed−INC
end
Event TargetUndetectedb=
when
grd1 : target det=FALSE
then
act1 : speed:=speed+INC
end
END
Figure 5.
Abstract machine of initial ACC system
the constraint such as “The speed can not be equal to maximal speed if it is raining or the road is sharp".
EVENTS
Event TargetDetectedb=
when
grd1 : target det=TRUE grd2 : speed>INC
then
act1 : speed:=speed−INC
end
Event TargetUndetectedb=
when
grd1 : target det=FALSE
grd2 : speed<MAX SPEED−INC
then
act1 : speed:=speed+INC
end
END
Figure 6.
Events with strengthened guards
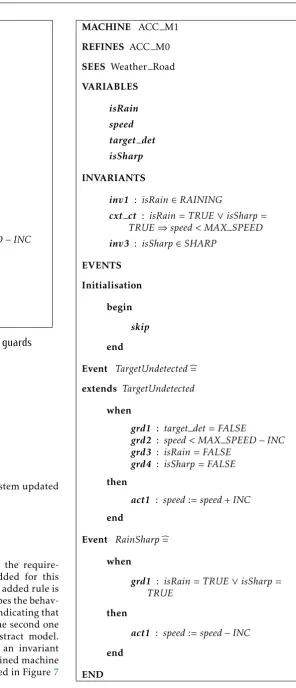
machine specifying the behavior of the system updated with new requirements.
Since two new rules are appended to the require-ments, two corresponding events are added for this machine. The first one representing a new added rule is not extended. This eventRainSharpdescribes the behav-ior of the system when sensors send data indicating that it is raining or the road is sharp. While the second one TargetUndetected refines event of the abstract model. The context constraint is formalized as an invariant cxt ct. The Event-B specification of the refined machine and extended context is partially illustrated in Figure7 and Figure8respectively.
MACHINE ACC M1
REFINES ACC M0
SEES Weather Road
VARIABLES
isRain speed target det isSharp
INVARIANTS
inv1 : isRain∈RAINING
cxt ct : isRain=TRUE∨isSharp=
TRUE⇒speed<MAX SPEED
inv3 : isSharp∈SHARP
EVENTS
Initialisation
begin
skip
end
Event TargetUndetectedb=
extends TargetUndetected
when
grd1 : target det=FALSE
grd2 : speed<MAX SPEED−INC
grd3 : isRain=FALSE grd4 : isSharp=FALSE
then
act1 : speed:=speed+INC
end
Event RainSharpb=
when
grd1 : isRain=TRUE∨isSharp=
TRUE
then
act1 : speed:=speed−INC
end
END
CONTEXT Weather Road
EXTENDS Target
CONSTANTS
RAINING SHARP
AXIOMS
axm1 : RAINING= BOOL
axm2 : SHARP=BOOL
END
Figure 8.
Extended context for ACC system
4.4. Verifying the system’s properties
The system should always satisfy context constraint preservation properties. It means that the context con-straint is preserved before and after using the context rules to adapt context changes. With proposed method, context constraints are translated to invariant clauses. Consequently, we prove the system’s correctness by proving proof obligations of such invariants.
The proof obligations (PO) for these invariants of both abstract and refined machines as follows:
• Machine ACC M0: “TargetDetected/ctx ct1/INV" (Figure3) and “TargetUndetected/ctx ct1/INV"
• Machine ACC M1: “TargetUndetected/ctx ct/INV" and “RainSharp/ctx ct/INV"
These POs are generated and proved automatically with the Rodin tool as illustrated in Figure9. Hence, the ACC system always satisfies predefined context rules.
5. Related work
Many papers have been proposed for modeling and verifying context-aware systems with various approaches. Key-value data structure [13, 15] has been used in early works as the simplest method for modeling context awareness. This method exposes many problems since it lacks of interoperability, representation and reasoning mechanism.
Most research efforts that are based on mark-up scheme model have defined and extended markup languages. Henricksenet al.[10] proposed to represent contextual data by Comprehensive Structure Context Profiles (CSCP). Indulska et al. [11] extended CC/CP model to define a set of CC/PP components and attributes to express a various types of context
information and context relationships.
Some researchers following the graphical model approach to model contextual data. Mostefaoui [14] presented a three-layered data model for context. Benselim and Hassina [5] recently presented an UML extension for representing and modeling context by creating some stereotypes that are described by several tagged values and some constraints.
Almost all ontology-based approaches have used high-level ontologies to formalize context information and models. Shehzad et al. [16] introduced a formal modeling method in context aware systems using OWL. Ejigu et al.[9] also proposed ontology based reusable context model that providing structure for contexts, rules and their semantics. The problem with these two pieces of work is that there was no verification mechanism presented.
Besides, Kjaergaardet al.[12] proposed a CONAWA calculus that provides mechanism for modeling and interwovenning sets of context-information. However, this approach has some limitations such as probabilistic context information modeling and verification of the system is not discussed yet.
More recently, Tran et al. [18] introduced a ROAD4Context framework which is based on Role-Oriented Adaptive Design (ROAD) [8] to model context-aware systems. However, in order to verify the system, it takes more intermediate steps to translate a ROAD4Context model to a Petri net model and then use SPIN to check the system’s behaviors. Furthermore, the transformation rules are not presented generally.
In comparison to these works, our method is different as we use Event-B as a modeling method. The advantages of our method are that a context-aware system can be modeled naturally by Event-B notations because the ECA form of context rules is mapped directly to an event. The Event-B refinement allows to develop a context-aware system gradually and ensures the correctness in each refinement stage. After the modeling, the verification process does not require any more translation step. Context constraints are proved mathematically by proving proof obligations which are automatically generated and proved in the supporting tool Rodin.
6. Conclusions and Future Work
Table 3.
Proof of context constraint preservation
target det
=
TRUE
⇒
speed
<
MAX SPEED
target det
=
TRUE
speed
>
INC
TargetDetected/ctx ct1/INV
`
target det
=
TRUE
⇒
speed
−
INC
<
MAX SPEED
Figure 9.
Checking properties in Rodin
the use of invariant preservation proof obligations generated by refinement mechanism in Event-B to verify the correctness of the system. However, in this paper, we just consider a simple case of context awareness. Limitation of data types in Event-B method is also a weak point when modeling complex context data.
Our future research will concentrate on elaborating the modeling systems with various kinds of context data which can be done by incorporating new theory plug-ins [6]. We are working on extending this approach with modeling uncertainty in context-awareness. Developing a tool that allows to translate context-aware systems to Event-B model automatically is also one of our future aims.
Acknowledgments
This work is partly supported by the project no. QG.12.50 granted by Vietnam National University, Hanoi (VNU).
References
[1] B method web site. http://www.bmethod.com, 2013.
[2] Event-b and the rodin platform. http://www.event-b.org, 2013.
[3] G. D. Abowd, A. K. Dey, P. J. Brown, N. Davies, M. Smith, and P. Steggles. Towards a better understanding of context and context-awareness. In Proceedings of the 1st International Symposium on Handheld and Ubiquitous
Computing, HUC ’99, pages 304–307, London, UK, UK,
1999. Springer-Verlag.
[4] M. Baldauf, S. Dustdar, and F. Rosenberg. A survey on context-aware systems.Int. J. Ad Hoc Ubiquitous Comput., 2(4):263–277, jun 2007.
[5] M. Benselim and H. Seridi-Bouchelaghem. Extended uml for the development of context-aware applications. In R. Benlamri, editor, Networked Digital Technologies, volume 293 of Communications in Computer and
Information Science, pages 33–43. Springer Berlin
Heidelberg, 2012.
[6] M. Butler and I. Maamria. Practical theory extension in event-b. InTheories of Programming and Formal Methods, volume 8051, pages 67–81. Springer Berlin Heidelberg, 2013.
[7] H. Chen.An Intelligent Broker for Context-Aware Systems. PhD thesis, University of Maryland, 2004.
[8] A. W. Colman.Role oriented adaptive design. PhD thesis, Swinburne University of Technology, 2006.
in pervasive computing. In Pervasive Computing and Communications Workshops, 2007. PerCom Workshops ’07. Fifth Annual IEEE International Conference on, pages 14– 19, 2007.
[10] K. Henricksen, J. Indulska, and A. Rakotonirainy. Modeling context information in pervasive computing systems. In Proceedings of the First International Conference on Pervasive Computing, Pervasive ’02, pages 167–180, London, UK, UK, 2002. Springer-Verlag. [11] J. Indulska, R. Robinson, A. Rakotonirainy, and K.
Hen-ricksen. Experiences in using cc/pp in context-aware systems. InProceedings of the 4th International Conference
on Mobile Data Management, MDM ’03, pages 247–261,
London, UK, UK, 2003. Springer-Verlag.
[12] M. B. Kjaergaard and J. Bunde-Pedersen. Towards a Formal Model of Context Awareness. In First International Workshop on Combining Theory and Systems Building in Pervasive Computing 2006 (CTSB 2006), 2006. [13] C. L.-P. Michael Samulowitz, Florian Michahelles. Capeus: An architecture for context-aware selection and execution of services. In K. ZieliÅĎski, K. Geihs, and A. Laurentowski, editors, New Developments in Distributed Applications and Interoperable Systems, vol-ume 70 ofIFIP International Federation for Information Processing, pages 23–39. Springer US, 2002.
[14] S. Mostefaoui. A context model based on uml and xml schema representations. InComputer Systems and Applications, 2008. AICCSA 2008. IEEE/ACS International Conference on, pages 810–814, 2008.
[15] B. Schilit, N. Adams, and R. Want. Context-aware computing applications. In In Proceedings of the Workshop on Mobile Computing Systems and Applications, pages 85–90. IEEE Computer Society, 1994.
[16] A. Shehzad, H. Q. Ngo, K. A. Pham, and S. Y. Lee. Formal modeling in context aware systems. InIn Proceedings of The 1 st International Workshop on Modeling and Retrieval of Context (MRCâĂŹ2004), 2004.
[17] T. Strang and C. Linnhoff-Popien. A context modeling survey. InIn: Workshop on Advanced Context Modelling, Reasoning and Management, UbiComp 2004 - The Sixth International Conference on Ubiquitous Computing, Nottingham/England, 2004.
[18] M. H. Tran, A. Colman, J. Han, and H. Zhang. Modeling and verification of context-aware systems.
In Proceedings of the 2012 19th Asia-Pacific Software
Engineering Conference - Volume 01, APSEC ’12, pages