Point-to-Point Positioning Control Performance of a
2-DOF Robotic Finger
Mariam Md Ghazaly1,2*, Mohamad Adzeem Mohamad Yuden1,2, Aliza Che Amran1,3
1Center for Robotic and Industrial Automation (CeRIA), Universiti Teknikal Malaysia Melaka, Hang Tuah Jaya, 76100 Durian Tunggal, Melaka, Malaysia
2Fakulti Kejuruteraan Elektrik, Universiti Teknikal Malaysia Melaka, Hang Tuah Jaya, 76100 Durian Tunggal, Melaka, Malaysia
3Fakulti Kejuruteraan Teknologi Elektrik dan Elektronik, Universiti Teknikal Malaysia Melaka, Hang Tuah Jaya, 76100 Durian Tunggal, Melaka, Malaysia
Abstract— This paper investigated the positioning control performance of a two-degree-of-freedom (2-DOF) robotic finger mechanism to achieve precision motion control as an initial study towards developing a multi-fingered robotic hand system. Previous research has shown that behaviours such as instability, large steady-state error and poor transient performance often occur in the robotic hand mechanism. Therefore, this paper described the design of a 2-DOF robotic finger mechanism, which was then compared with the performance of several controllers by Point-to-Point (PTP) positioning control. The proposed controllers relied on the angular position control of each motor joint, (i.e. the position control of the 2-DOF robotic finger mechanism). The closed-loop system for an uncompensated and compensated system were used in this study with several reference angles. Three different control strategies namely; (i) Proportional Integral Derivative (PID) controller (ii) Fuzzy Logic controller (FLC) and (iii) Linear Quadratic Regulator (LQR) controller were selected for comparison via simulation and in performing the experimental work. The controller results were validated by Point-to-Point (PTP) positioning control at different reference amplitudes. From the results, the FLC was found to provide optimal performance with a higher level of adaptability for the PTP positioning control with improvements in both response time by 97.9% (0.075 s) and steady-state error by 99.5% (0.01°) compared to the uncompensated system.
Index Term— point-to-point, robotic finger, controller, closed-loop
I. INTRODUCTION
Over the past few years, researchers have shown great interest in the field of robotic hands [1]–[3]. The robotic hand itself is a mechanism that performs a vital role in operations and functions that require dexterity and precision. Therefore, designing and positioning a control system on the robotic hand is of immense value in helping to ease and reduce the workload of individuals due to repeatability, high accuracy and the ability of the robotic hand to function continuously without the need for human intervention and control [4]. Moreover, the robotic hand can be instrumental in replacing the human hand in dangerous and hazardous situations or acting as an auxiliary for precision tasks such as performing surgical procedures. Accordingly, this has helped to attract and capture the attention of many researchers over the years towards investigating the design of control systems for a robotic hand [5], [6]. In fact, the demand for high precision application performance of robotic hand systems has significantly increased in recent years. Point-to-Point (PTP) positioning is frequently used to investigate and evaluate the
performance of the control system as the robotic hand system requires a high-performance motion controller to control the precise movement of the robotic fingers. In this case, a robust controller with a simple structure and design, with approximately zero overshoot, and producing a fast response and precision for this particular industry is desired. Although, for the robotic hand system to be accepted, the system needs to demonstrate high performance regarding accuracy, consistency and overall stability, in order to carry out precise and dexterous tasks. Unfortunately, though, traditional control systems have not been able to achieve the level of accuracy required to control finger positioning [7].
Even though simple linear methods have been tested, such as using a Proportional Integral Derivative (PID) controller, many of these methods have been unsuccessful in controlling the system effectively [8]. Previous researchers [9], [10] that have investigated the application of a smart prosthetic hand have revealed that the PID controller often gave rise to overshooting and oscillation. Similarly, a neural-network-based, terminal sliding mode control system, has been recommended in several studies for robotic manipulators [11], but designing the control system was considered to be far too tedious and complex. Interestingly, a study by [12] investigating the angle tracking control of a rehabilitation robotic hand, used a Fuzzy PID controller which provided far better performance compared to using a conventional or standard PID controller. Although in this case, to move the human finger a pneumatic actuation and pulley mechanism were used. In another design, simulated for this particular purpose, used a non-conventional type of PID controller employing Fuzzy logic.
II. CONSTRUCTION AND DESIGN OF THE ROBOTIC HAND
The robotic hand developed for this research was based on [13] which used a DC micromotor at each joint to move the robotic finger whereas, in contrast, the work of [13] applied a tendon-driven mechanism to actuate the robotic fingers. The developed design of the robotic hand in this research remains the same as with the previous one [13], consisting of a thumb, index finger and middle finger. However, there were some modifications to the size and dimension of this robotic hand, and consequently, it was much smaller and lighter compared to the work by [13]. The robotic hand design for this research using Solidworks software is illustrated in Figure 1. The parameter designs for the robotic hand system developed by [13] and developed in this research are listed in Table 1.
Fig. 1. The robotic hand design via Solidworks software.
TABLE I.
PARAMETERS FOR THE DESIGN OF THE ROBOTIC HAND Robotic Hand by (Jung et.al., 2007) Developed Robotic Hand
Parameter Size (L) Mass Size (LxWxH) Mass
Fingertip 90 mm 0.02 kg 25x18x61 mm 0.0110 kg
Finger link 90 mm 0.03 kg 25x18x72 mm 0.0150 kg
Thumb link 123 mm 0.07 kg 25x25x67 mm 0.0490 kg
Palm 135 mm 0.16 kg 100x20x124 mm 0.052 kg
DC micro motor with
encoder
- - - 0.0318 kg
Total mass include all the fingers
0.56 kg 0.4444 kg
III. EXPERIMENTAL SETUP
In this research paper, the developed robotic hand consisted of four active fingers in order to reduce costs and to ensure that the hand had sufficient flexibility for the intended purpose of the research. Each finger of the hand consisted of two links and a 2-DOF, while the thumb had three links and 3-DOF to allow adduction and abduction movement to occur. Therefore, in all, the developed robotic hand had 9-DOF. The two links and 2-DOF fingers applied for this research consisted of a distal flexure joint and a proximal pin joint. The basic design of these fingers was determined by the requirement for a general purpose human hand. For example, changes such as lengthening of the distal link and the use of a bevel gear at the proximal joint were chosen to improve the ability of the robotic hand to apply greater fingertip forces for object manipulation. The fingers themselves comprised of 2-DOF which in many respects, implied that with two actuators, the degree of motion was uncertain. Therefore, the fingertip was designed slightly curved to reduce the additional DOFs. Also, by extending the finger motion using three-dimensional
spaces to help extend the finger motion, only two DC micro motors were required to drive the finger.
In this research, the measurements of the designed robotic hand when wholly outstretched were; width of 100 mm, a length of 257 mm and a thickness of 20 mm. The total mass of the robotic hand was about 444 g including the weight of the circuit boards. Importantly, the selection and design of a suitable palm size of the hand was significant to prevent a reachable and/or limited working range.
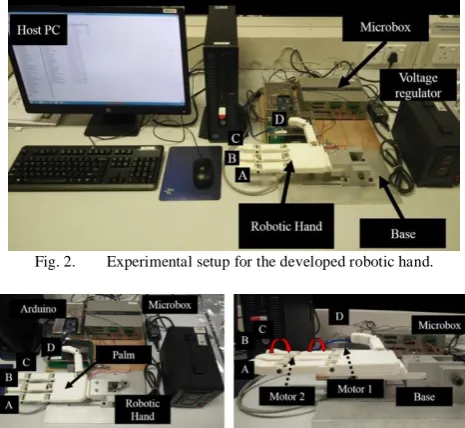
The function and operation of the robotic hand will generally rely on the performance of the actuator. Therefore, in this research, a Faulhaber DC micromotor was used to actuate every finger joint of the hand given the motor is known to be more steadfast regarding reliability, response time and efficiency. The actuation mechanism comprised of a DC micromotor, a bevel gear, planetary gearhead, and an optical encoder. Initially, it was thought that to actuate the finger, a tendon drive mechanism was needed, but the idea was soon dropped given the inability of the hand to sufficiently grasp an object. Therefore, to transmit the torque between the joints, it was decided to use a series of bevel gears which would help to provide more precise information to reduce the effect of hysteresis and elasticity of the transmission scheme. Although to produce the anticipated output torque required, the number or amount of teeth of the bevel gear needed to be selected cautiously as the different number of teeth may result in a different diameter size [of the gear], thereby impacting the complete design of the mechanism. To place the shaft correctly, bearings were also needed. Then supposing that the position of the shaft was correct, the precise angle upon opening and closing the finger will be effectively realised. Figure 2 and Figure 3 respectively illustrate the arrangement of the developed robotic hand.
Fig. 2. Experimental setup for the developed robotic hand.
Fig. 3. View of the developed robotic hand; (a) isometric view and (b) side view.
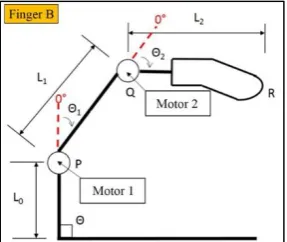
joint was fitted inside the robotic finger link and palm. The two links, (L1) and (L2), were rotated using a DC micromotor at the joints (P) and (Q) respectively. L0 was noted as the displacement between the robotic hand palm and joint (P). Figure 4 displays the schematic design of the 2-DOF robotic finger developed in this research. Similar to a human hand, every joint of the robotic finger was attached using a shaft to provide a smooth and free motion to enable each link to motion the 2-DOF robotic finger. Also, the furthest point of the fingertip was designed slightly curved to help in manipulating and grasping objects. In using the suggested mechanism, the multi-jointed robot finger was not only constructed, but the 2-DOF robotic finger was exceptionally found to be lightly weighted and compact. Table 2 describes the parameter design of single 2-DOF robotic finger mechanism in detail.
Fig. 4. Schematic diagram of the 2-DOF robotic finger (Finger B).
TABLE II.
PARAMETERS FOR THE DESIGN OF THE ROBOTIC HAND PARAMETER SPECIFICATIONS OF A 2-DOF ROBOTIC FINGER.
Parameters Value
Dimension (L x W) 133 mm x 25 mm
Mass 57.8 g
Number of link 2
Degrees of freedom 2-DOF x 1 finger Articulation sensor Optical encoder
Actuator Faulhaber DC micro motor Link rotation limitation Link 1; 0°<Θ<90°
Link 2; 0°<Θ<90°
During the PTP positioning experiment, the angular positions for (L1) and (L2) were measured where the desired position of the 2-DOF robotic finger was reliant on the (L1) and (L2) joint angles. As shown in Figure 4, ‘theta’ was the joint angle that references the robotic hand palm axis and finger link axis. Also, the angular position of the joint, ‘theta’ for every robotic finger was within a minimum range of 0° and a maximum range of 90°. Moreover, the mechanism of the links, (L1) and (L2) in this case was similar, with the only difference between these two links being the mass. The 2-DOF robotic finger mechanism for (L2) was positioned on top of (L1), and therefore (L1) needed to withstand the weight of (L2). Also, (L1) of the 2-DOF robotic finger mechanism had 1.5 times heavier load compared to (L2), given (L2) was positioned on top of (L1).
IV. CONTROLLER DESIGN PROCEDURE
A. Proportional Integral Derivative (PID) Controller In this research, the PID control method was applied to enhance the performance of the system, namely; the response
time, steady-state error and percentage of overshoot. The PID controller was first implemented, and the results were then compared with the uncompensated closed-loop system. MATLAB Simulink software was used to execute the control program. The parameters of the PID controller were then fine-tuned in order to obtain improved results of the output with respect to the response time, error and overshoot for the joint motor control. In this research, the PID controller was designed such that the output parameter responses were fast and reduced any error during position control. The schematic structure for the 2-DOF robotic finger mechanism for PID position control used in this research study is illustrated in Figure 5.
Fig. 5. The schematic structure for the compensated closed-loop system with a PID controller.
The PID controller for the system was designed using the Ziegler-Nichols closed-loop tuning method to determine the PID control parameters for the motor’s joint of the 2-DOF robotic finger. In this study, the obtained ultimate gain value, Ku, was 54.6, and the period of oscillation, Pu was 0.015.
These values were then substituted into the Ziegler-Nichols closed-loop equations, and the approximated parameters were obtained. Table 3 shows the Ziegler-Nichols tuning formula method applied in this research. The PID controller comprised of proportional, integral and derivative components and the general equation of the P, PI and PID controllers are given in Equation (1).
𝐺𝑃𝐼𝐷 = 𝐾𝑝+ 𝐾𝑖
𝑠 + 𝐾𝑑𝑠 (1)
TABLE III.
ZIEGLER-NICHOLS TUNING FORMULA METHOD.
Control Type Kp Ki Kd
P 0.50 × 𝐾𝑢 - -
PI 0.45 × 𝐾𝑢 0.85 × 𝑃𝑢 -
PID 0.60 × 𝐾𝑢 0.50 × 𝑃𝑢 0.13 × 𝑃𝑢
B. Fuzzy Logic Controller (FLC)
Fuzzy logic control (FLC) is a control method founded on a linguistic approach which is obtained from acquiring expert knowledge in order to create an automated control approach. Adopting this approach, linguistic rules were used to describe and control the actions of the FLC. The FLC employed a method of quantifying ambiguous information (input Fuzzy sets) which were produced by an inference or interpretation scheme based on a knowledge base or repository of information of control positions utilised in the system. Figure 6 demonstrates the schematic diagram structure of the compensated closed-loop system with FLC.
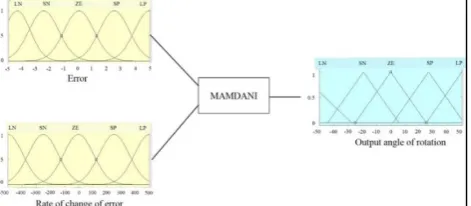
The Mamdani-type inference technique and centroid defuzzification technique were then applied in the system upon which a two input and one output system were implemented for the compensated closed-loop system with FLC. The steady-state error (e) and the rate of change error (ce) were the system inputs, and the angle of the 2-DOF robotic finger mechanism was the output. In this case, the error was defined as the reference angle subtracted by the output angle, where the rate of change of the error represented the current values subtracted by the previous error values. Also, Gaussian Fuzzifier was used for the input, and the Triangular Fuzzier used for the output. In this research, the Fuzzy set of error input was set between -5 and 5 degrees and the derivative error consisted of a vast range between -500 and 500 degrees. The range of the motor output was set between -50 and 50 degrees which were equivalent to the position that needed to be applied to each joint in order to produce the desired angle. Figure 7 displays the membership functions for the two input variables and one output variable of the FLC used in this study.
Fig. 7. All membership functions for the two input variables and one output variable of FLC.
C. Linear Quadratic Regulator (LQR) Controller
The LQR controller was based on the state space system which acquired the optimal or best control input by solving the Algebraic Riccati equation. Figure 8 displays the LQR control system employed in this study.
Fig. 8. The schematic diagram structure of the compensated closed-loop system with LQR controller.
A linear time-invariant system was also considered as given in Equation (2).
𝑥̇(𝑡) = 𝐴𝑥(𝑡) + 𝐵𝑢(𝑡) (2)
where, 𝑥̇ is the state variable, and u is the control input variable.
The objective of the LQR controller design was to establish the state-feedback control vector, 𝐾𝐿𝑄𝑅 to provide the control
vector, 𝑢(𝑡). The linear state feedback control law as given in Equation (3), was then determined by reducing a quadratic cost function, as expressed in Equation (4). The Algebraic
Riccati Equation then generated the Riccati solution, 𝑃 as shown in Equation (5). The initial purpose here was to find the state feedback control law in designing the process so that the cost function index was minimised.
𝑢(𝑡) = −𝐾𝐿𝑄𝑅𝑥(𝑡) = −𝑅−1𝐵𝑇𝑃𝑥(𝑡) (3)
𝐽 = ∫ [𝑥∞ 𝑇(𝑡)𝑄𝑥(𝑡) + 𝑢𝑇(𝑡)𝑅𝑢(𝑡)]𝑑𝑡
0 (4)
𝐴𝑇𝑃 + 𝐴𝑃 − 𝑃𝐵𝑅−1𝐵𝑇𝑃 + 𝑄 = 0 (5)
Where the diagonal weight matrix, 𝑄 is positive definite
(𝑄 > 0), and the weight factor, 𝑅 is positive semi-definite
𝑅 ≥ 0 . The LQR controller design was based upon
minimising the quadratic performance index, 𝐽 at which point the values of 𝑄 and 𝑅 were selected with suitable weightings for the system. The best 𝑄 matrix for the system was [8 0, 0 8]. The gains summation of the 𝑄 matrix was determined to be 9.0 V which was the upper limit of the digital signal processing unit. Subsequently, the designed 𝑄 diagonal weight and the 𝑅 weight factor were converted using MATLAB in order to obtain the state-feedback control gains,
𝐾𝐿𝑄𝑅. The MATLAB commands are shown in Equation (6).
𝐾 = 𝑙𝑞𝑟(𝐴, 𝐵, 𝑄, 𝑅) (6)
In this paper, the optimum diagonal 𝑄 matrix was found to be equal to [8 0, 0 8] with the 𝑅 value equal to 1. According to these designed weight parameters, the state-feedback control gains, 𝐾𝐿𝑄𝑅 were obtained as [0.9233 1.7346] for Motor
(1) and [2.0927 208299] for Motor (2).
V. RESULTS AND DISCUSSIONS
Initially, the step signal was given as the reference signal, and the output graph was observed to verify whether the output signal followed the selected reference signal. According to previous studies, the reference signal is important in the positioning performance of the controller; as the reference signal must be able to ensure that the system moves and decelerates smoothly. A step input signal of amplitude 15°, 30° and 40° respectively were chosen as the reference signal for the PTP positioning control [14] which represented the movement of the finger during manipulation and grasping an object. Table 4 shows the parameters fixed and varied for the compensated closed-loop PTP control experiments.
TABLE IV.
PARAMETERS FOR THE PTP TRAJECTORY CONTROL EXPERIMENTS [14].
Parameter Numerical Value
Reference type Step input
Reference angle 15 °, 30 °, 40 °
Simulation time 10 s
Starting time 0.5 s
Sampling time 0.001 s
(a) (b)
Fig. 9. Experimental step response between the PID, FLC and LQR controllers with the reference angle of 15° (a) Motor (1) (b) Motor (2).
(a) (b)
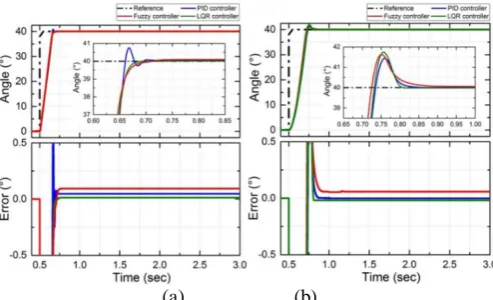
Fig. 10. Experimental step response between the PID, FLC and LQR controllers with a reference angle of 30° (a) Motor (1), (b) Motor (2).
(a) (b)
Fig. 11. Experimental step response between the PID, FLC and LQR controllers with a reference angle of 40° (a) Motor (1) (b) Motor (2).
The experimental results presented in this paper indicated that all three control approaches were implemented successfully, where FLC offered better results compared to the PID and LQR control methods in PTP control performances. Also, significant differences were found between the results of the uncompensated closed-loop system and the proposed controllers. For instance, in comparison with the FLC, the PID and LQR controllers presented a higher steady-state error. Moreover, the PID controller produced faster rise time, and a minimum steady-state error was only observed for motor (2) for the input angle of 15° and 30° respectively. Although, the FLC performed better for motor (1).
TABLE V.
TRANSIENT ANALYSIS OF THE PID,FLC AND LQR CONTROLLERS AT DIFFERENT ANGLES OF MOTOR (1).
Reference Angle (°)
Performance index Controller
PID FLC LQR
15
Rise time, Tr (s) 0.043 0.005 0.057 Settling time, Ts (s) 0.079 0.075 0.091 Overshoot, OS (%) 4.15 0.01 0.10 Steady-state error, SSE
(°)
0.02 0.01 0.02
30
Rise time, Tr (s) 0.091 0.094 0.095 Settling time, Ts (s) 0.130 0.126 0.131 Overshoot, OS (%) 2.13 0.03 0.14 Steady-state error, SSE
(°)
0.02 0.01 0.05
40
Rise time, Tr (s) 0.124 0.123 0.122 Settling time, Ts (s) 0.168 0.162 0.163 Overshoot, OS (%) 1.88 0.04 0.23 Steady-state error, SSE
(°)
0.04 0.01 0.09
TABLE VI.
TRANSIENT ANALYSIS OF THE PID,FLC AND LQR CONTROLLERS AT DIFFERENT ANGLES OF MOTOR (2).
Reference Angle (°)
Performance index Controller
PID FLC LQR
15
Rise time, Tr (s) 0.081 0.086 0.084 Settling time, Ts (s) 0.135 0.140 0.210 Overshoot, OS (%) 2.74 0.13 2.53 Steady-state error, SSE
(°)
0 0.02 0.05
30
Rise time, Tr (s) 0.122 0.131 0.133 Settling time, Ts (s) 0.193 0.200 0.210 Overshoot, OS (%) 5.12 0.63 4.69 Steady-state error, SSE
(°)
0 0.02 0.01
40
Rise time, Tr (s) 0.156 0.146 0.156 Settling time, Ts (s) 0.243 0.232 0.238 Overshoot, OS (%) 0.36 4.06 4.36 Steady-state error, SSE
(°)
0 0.06 0.02
Regarding the performance parameters, the FLC exhibited far better results compared to the PID and LQR controllers. Indeed, the real experiments indicated that FLC had a faster settling time with respect to the PID and LQR controllers and was able to reduce the level of overshoot. Notably, the overshoot percentage obtained by the PID controller for motor (1) and motor (2) was considerably high and was therefore unacceptable whereas the FLC provided better performance. Even though the FLC gave slightly slower response time, it was better in overshoot. The closed-loop step response also compared the error and settling time at an angle of 15° for Motor (1) with (0.02°, 0.079 s) for the PID controller, (0.01°, 0.075 s) for the FLC controller and (0.02°, 0.091 s) for the LQR controller respectively. Whereas, for Motor (2), the error and settling time showed (0°, 0.135 s) for the PID controller, (0.02°, 0.140 s) for the Fuzzy controller and (0.05°, 0.210 s) for LQR controller respectively.
schemes. For instance, the FLC demonstrated improvements in both response time by 97.9% (0.075 s) and steady-state error by 99.5% (0.01°) over the uncompensated closed-loop system in a series of experimental step response tests. Therefore, in summary, the FLC control method proposed produced good results especially for the reduction of settling time, overshoot and steady-state error in the PTP positioning control experiment.
VI. CONCLUSIONS
This paper designed and compared the performance of different controllers for position motion control of a 2-DOF robotic finger mechanism and to evaluate the effectiveness of the proposed controllers for Point-to-Point (PTP) positioning control. The proposed controllers included: (i) PID controller (state of the art classical control); (ii) Fuzzy Logic controller (FLC) (one of the best for intelligent control) and (iii) LQR controller (state of the art for optimal control). These proposed controllers were designed and compared for the 2-DOF robotic finger mechanism to achieve fast and precise positioning performances. The results of this study demonstrate that the positioning PTP control of the 2-DOF robotic finger mechanism can be satisfactorily controlled via the FLC control approach. Also, through the experimental results, the transient response and steady-state error of the output scheme were improved through replacing the PID and LQR controllers with the FLC which demonstrated improvements in both the response time by 97.9% (0.075 s) and steady-state error by 99.5% (0.01°) over the uncompensated closed-loop system in a series of experimental step response tests. In conclusion, the FLC proved to be the best controller compared to the PID and LQR controllers as the transient response and steady-state error were minimised.
ACKNOWLEDGMENT
The authors wish to express their gratitude to Motion Control Research Laboratory (MCon Lab), Center for Robotics and Industrial Automation (CeRIA) and Universiti Teknikal Malaysia Melaka (UTeM) for supporting the research and publication. This research is supported by Universiti Teknikal Malaysia Melaka grant no. JURNAL/2018/FKE/Q00006, Center for Robotics and Industrial Automation (CeRIA) and Center for Research and Innovation Management (CRIM).
REFERENCES
[1] N. Thayer and S. Priya, “Design and implementation of a dexterous anthropomorphic robotic typing (DART) hand,” Smart Mater. Struct., vol. 20, no. 3, 2011, pp. 35010-35012.
[2] A. M. Zaid and M. A. Yaqub, “UTHM HAND: Kinematics behind the dexterous anthropomorphic robotic hand,” in Communications in
Computer and Information Science, vol. 330, 2012, pp. 119–127.
[3] Z. Xu, V. Kumar, and E. Todorov, “A low-cost and modular, 20-DOF anthropomorphic robotic hand: Design, actuation and modeling,” in
IEEE-RAS International Conference on Humanoid Robots, 2015, pp.
368–375.
[4] X. T. Le, W. G. Kim, B. C. Kim, S. H. Han, J. G. Ann, and Y. H. Ha, “Design of a flexible multifingered robotics hand with 12 D. O. F and its control applications,” in 2006 SICE-ICASE International Joint
Conference, 2006, pp. 3461–3465.
[5] T. Yoshikawa, “Multifingered robot hands: Control for grasping and manipulation,” Annu. Rev. Control, vol. 34, no. 2, 2010, pp. 199–208. [6] J.-Y. Nagase, N. Saga, T. Satoh, and K. Suzumori, “Development and control of a multifingered robotic hand using a pneumatic tendon-driven actuator,” J. Intell. Mater. Syst. Struct., vol. 23, no. 3, 2011, pp. 345–352.
[7] H. Zhao and L. Li, “Sliding mode control on the position for a multifingered hand,” in ICCSE 2010 - 5th International Conference on Computer Science and Education, Final Program and Book of
Abstracts, 2010, pp. 1287–1290.
[8] A. Polotto, F. Modulo, F. Flumian, Z. G. Xiao, P. Boscariol, and C. Menon, “Index finger rehabilitation/assistive device,” in Proceedings of the IEEE RAS and EMBS International Conference on Biomedical
Robotics and Biomechatronics, 2012, pp. 1518–1523.
[9] C. H. Chen, D. S. Naidu, A. Perez, and M. P. Schoen, “Fusion of hard and soft control techniques for prosthetic hand,” in Proceedings of the
IASTED International Conference on Intelligent Systems and Control,
2008, pp. 120–125.
[10] G. H. Chen, D. Subbaram Naidu, A. Perez-Gracia, and M. P. Schoen, “Hybrid control strategy for five-fingered smart prosthetic hand,” in
Proceedings of the IEEE Conference on Decision and Control, 2009,
pp. 5102–5107.
[11] L. Wang, T. Chai, and L. Zhai, “Neural-network-based terminal sliding-mode control of robotic manipulators including actuator dynamics,” IEEE Trans. Ind. Electron., vol. 56, no. 9, 2009, pp. 3296– 3304.
[12] J. Wu, J. Huang, Y. Wang, K. Xing, and Q. Xu, “Fuzzy PID control of a wearable rehabilitation robotic hand driven by pneumatic muscles,”
in 20th Anniversary MHS 2009 and Micro-Nano Global COE - 2009
International Symposium on Micro-NanoMechatronics and Human
Science, 2009, pp. 408–413.
[13] S.-Y. Jung, S. Kang, M. Lee, and I. Moon, “Design of Robotic Hand with Tendon-driven Three Fingers,” 2007, pp. 83–86.