California State University, San Bernardino California State University, San Bernardino
CSUSB ScholarWorks
CSUSB ScholarWorks
Theses Digitization Project John M. Pfau Library
2003
The mathematics of object recognition in machine and human
The mathematics of object recognition in machine and human
vision
vision
Sunyoung Kim
Follow this and additional works at: https://scholarworks.lib.csusb.edu/etd-project
Part of the Applied Mathematics Commons
Recommended Citation Recommended Citation
Kim, Sunyoung, "The mathematics of object recognition in machine and human vision" (2003). Theses Digitization Project. 2425.
https://scholarworks.lib.csusb.edu/etd-project/2425
THE MATHEMATICS OF OBJECT RECOGNITION IN MACHINE
AND HUMAN VISION
A Thesis
Presented to the
Faculty of
California State University,
San Bernardino
In Partial Fulfillment
of the Requirements for the Degree
Master of Arts
in
Mathematics
by
Sunyoung Kim
THE MATHEMATICS OF OBJECT RECOGNITION IN MACHINE
AND HUMAN VISION
A Thesis
Presented to the
Fa9ulty of
California State Uni~ersity,
San Bernardino
by
Sunyoung Kim
12--/4
!os
Oat~ I
December 2003
Approved by:
Chair
Peter William, Chair
Department of Mathematics
Terry Hallett,
Graduate Coordinator Department of
ABSTRACT
We present the framework of projective geometry. This
framework allows us to study the reconstruction of three
dimensional structure and motion from sequences of two
dimensional images of the available features of an object.
This theory is derived in the context of the affine camera,
which preserves parallelism and generalizes the
orthographic, scaled orthographic and para-perspective
camera models.
We derive explicit recognition polynomials for the
detection of rigid three-dimensional motion from two weak
perspective views by using Kontsevich's equation. In
addition to detection of rigid motion, these polynomials
can be used to recognize a given three-dimensional object
from two-dimensional views,. and in fact to reconstruct its
depth coordinates.
We also provide some interesting theorems in linear
algebra which arise as generalizations of theorems used in
ACKNOWLEDGMENTS
I thank God for the intellect to explore the wonderful
world of Mathematics. I thank my parents for give me a
support and opportunity to study in United State of
America. I thank Paul Amaya, who is assistant director of
International Student Services, for helped me and
understood me about my situation and legal status. Most of
all, I thank my advisor Dr. Chetan Prakash for his patient
TABLE OF CONTENTS
ABSTRACT i i i
CHAPTER FOUR: RECOGNITION OF RIGID THREE DIMENSIONAL MOTION FROM SEQUENCES OF TWO
CHAPTER FIVE: RECONSTRUCTION OF THREE DIMENSIONAL MOTION FROM SEQUENCES OF TWO
ACKNOWLEDGMENTS iv
LIST OF FIGURES vi
CHAPTER ONE: PROJECTIVE GEOMETRY 1
CHAPTER TWO: CAMERA MODELS . . . 5
CHAPTER THREE: EPIPOLAR LINES AND PLANES 15
DIMENSIONAL IMAGES . . . 20
DIMENSIONAL IMAGES . . . . 26
CHAPTER SIX: SOME THEOREMS IN LINEAR ALGEBRA 28
LIST OF FIGURES
Figure 1. Image Formation in a Pinhole Camera 5
Figure 2. The Pinhole Camera Model . 6
Figure 3. Camera Models: (a) perspective (all rays
pass through a single projection point O,
and the intersection of the ray star with
the image plane _generates the image); (b) orthographic(all rays are parallel, with the optical center Oat infinity);
(c) weak perspective(combined orthographic
and perspective projection). For (b) and
(c), parallel lines in the scene remain parallel in the image; this isn't true for
(a). 10
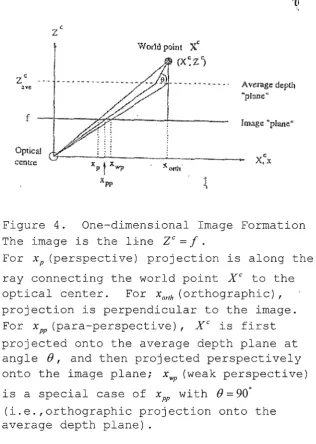
Figure 4. One-dimensional Image Formation
The image is the line
zc
=
f'.
ForxP (perspective) projection is along the
ray connecting the world point Xe to the
optical center. For xonh (orthographic) ,
projection is perpendicular to the image.
For xPP (para-perspective) , Xe is first
projected onto the average depth plane at
angle 0, and then projected perspectively
onto the image plane; x~ (weak perspective)
is a special case of xPP with 0=90° (i.e.,
orthographic projection onto the average
depth plane) 11
Figure 5. The Epipolar Geometry 15
Figure 6. (Ci,C2 ) is Parallel to the Plane R1 :
is oo; the epipolar lines are parallel
E1
in the plane R1 and at intersect at E2
17
Figure 7. (Ci,C2 ) is Parallel to the Planes R1
CHAPTER ONE
PROJECTIVE GEOMETRY
The study of projective geometry is related to the
sort of sensors that machines and humans use for vision.
It is known from geometric optics that any system of lenses
can be approximated by a system that realizes a perspective
projection of the world onto a plane. The simplest way to
look at such a system is to look at i t projectively. Here
is the general definition of projective space of any
dimension.
Definition: a point of an n dimensional real projective
is represented by an (n+l) vector of real coordinates
x= [ Xi,X 2 ,···,xn+I], where at least one of the xi is nonzero.
The numbers are called the homogeneous or projective
coordinates of the point, and the vector x i s called a
coordinate vector. Note that the correspondence between
points and coordinate vectors is not one to one.
Note that an (n+l) x (n+l) matrix A such that det(A)-::f:-0
defines a linear transformation on Rn+I which may be
'
interpreted as a projective isomorphism ofP11
Definition: i) (n+l)x(n+l) matrix A with detA:;cO is called
a collineation. ii) the set of collineations is a group and
this group is also known as the projective group. iii) a
projective basis is a set of (n+2) points of pn such that
no (n+l) of them are linearly dependent. Any point x of
pn can be described as a linear combination of the (n+l)
points of the standard basis:
n+I
x = Ix;e;'
i=l
where X; are the projective coordinates in this basis.
P1
For n
=
l, projective space is called the projective line;P
2is called the projective plane;
P
3is called simply
P1
projective space. The space is the simplest of all
projective spaces and many structures embedded in
higher-dimensional projective spaces have the same structure as
P1
• In P1, a point on the line can be written as x =
P2
The space is used to model the image plane as a
P2
projective plane. A point in is defined by three
numbers(xi,x2,x3 ) , not all zero. There are objects other by
and the lines form coordinate vectors x and u defined up to
3
a scale factor. The equation of the line is then 'z:u;X;
=
0 i=lP
2in the standard projective basis of • Formally, there is
no difference between points and lines in P2 • This is
known as the principle of duality. Among all possible
lines, the one whose equation is x3= 0 is called the line at
infinity of P2, denoted by
t .
Each line L= ( u1 , u2 , u3 ) in3
the projective plane of the form of 'z:u;X; = 0 intersects l"'
i=l
at the point (-u2 ,ui,O), which is the point at infinity of
the line L.
There is a structure of the projective plane that has
numerous applications, especially in stereo and motion:
P
2Definition: A pencil of lines is the set of lines in
P2
passing through a fixed point. Any pencil of lines in
is projectively isomorphic to the one-dimensional
projective space P' .
P 3
A point x in , known as the projective space, is
defined by four numbers (~'~'~'~), not all zero. There
planes. A plane is also defined as a four numbers
( u"u2,u3, u4 ) , not all zero. . The points and the planes form a
coordinate vector x and u defined up to a scale factor.
4
The equation of this plane is then
I:Uixi
= 0 in the standardi=l
projective basis ( ei,e2,e3,e4 , e5 ) of P 3 • A line is defined as
the set of points that are linearly dependent on two points
and P2 • Among all possible planes, the one whose P1
equation is x4 = 0 is called the plane at infinity or ~ 00 of
P 3 • As in the case of the projective plane, i t is often
useful to think of the points in the plane at infinity as
the set of directions of the underlying affine space. For
example, the point of projective coordinates [x1 , x2 , x3 , OJ
represents the direction parallel to the vector [x1 , x2 , x3]
and indeed i t does not matter whether.x1 , x2 and x3 are
defined up to a scale factor, since the direction does not
CHAPTER TWO
CAMERA MODELS
There is a deep relationship between camera models and
projective geometry. So I would like to look at camera
models. A simple camera model can be considered from two
sta6dpoints. One is a geometric model and the other is
physical model. In this paper, we are only interest in a
geometric model.
~-•_-~
---/ /
/1
- - - image
object
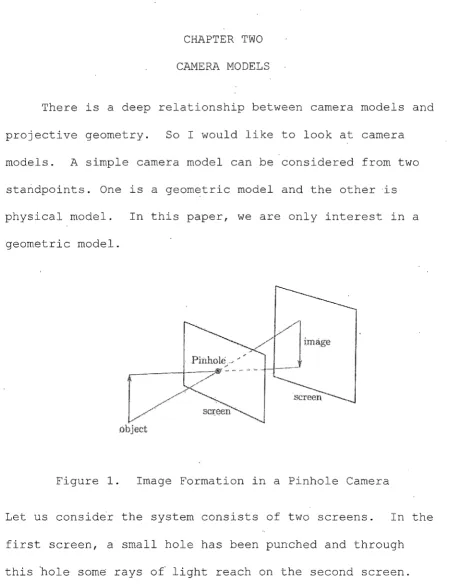
Figure 1. Image Formation in a Pinhole Camera
Let us considir the system consists of two screens. In the
first screen, a small hole has been punched and through
this bole some rays of light reach on the second screen.
---
---
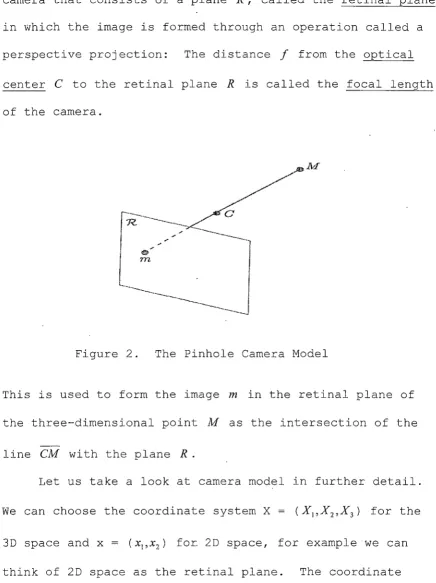
---camera that consists of a plane
R,
called the retinal planein which the image is formed through an operation called a
perspective projection: The distance f from the optical
center C to the retinal plane R is called the focal length
of the camera.
lvI
Figure 2. The Pinhole Camera Model
This is used to form the image m in the retinal plane of
the three-dimensional point M as the intersection of the
line CM with the plane R.
Let us take a look at camera model in further detail.
We can choose the coordinate system X = ( Xi,X2 ,X3 ) for the
3D space and x
= (
Xi,X 2 ) for. 2D space, for example we cansystem X = ( Xi,X2 ,X3 ) is called the standard coordinate
system of the camera. The relationship between image
coordinates x and 3D space coordinates can be written in
terms of a projection matrix P
Pi2 Pi3
lP,,
P,,
j
x,
X2(1) P2, P22 P23 P24
X3 P31 P32 P33 P34
X4
related to x and X by x
X
Thus a camera can be considered as a system that
performs a linear projective transformation from the
P3
P
2projective space into the projective plane • We
sometimes refer to the three-dimensional coordinate system
X as the world coordinate system. Also, the camera can be
considered as a system that depends upon both intrinsic and
extrinsic parameters. Intrinsic parameters are those that
do not depend on the position and orientation of the camera
scale factors a 11 and av and the coordinates u0 and v0 of the
intersection of the optical axis with the image plane.
There are six extrinsic parameters, three for the rotation
and three for the translation of the camera, which define
the transformation from the world coordinate system to the
coordinate system of the camera.
There is a special case of the projective camera
called the affine camera. This affine camera can be
written using equation (1) with P31
=
P32=
P33=
0 :Fi2 Fi3
[P.1
P,,1
pa.ff= ~ I P22 P23 P24 (2)
0 0 P34
It corresponds to a projective camera with its optical
center at the plane at infinity; consequently, all
projection rays are parallel. We can decompose PaJJ •
Gil G12 Gl3 Gl4
C12
c1,ff
0 0G21 G22 G23 G24
[c"
Paff= CP 11 G= C21 C22 c23 o 1 0
G31 G32 G33 G34
c31 C32 C33 0 0 0
~1
G41 G42 G43 G44
The 3x3 matrix C accounts for intrinsic camera parameters
and represents a 2D affine _transformation (hence
=
0) . We assume there is no shear in the camera axesC31
=
C320
f
0
where~ is the camera aspect ratio, f the focal length and
(ox,oy) the principal point (where the optic axis intersects
the image plane). The 3x4-matrix Pn performs the parallel
projection operation, and the 4x4 matrix G accounts for
extrinsic camera parameters, encoding the relative position
and orientation between camera and the standard coordinate
system. Therefore the affine camera covers the composed
effects of i) a 3D affine transformation between world and
camera coordinate system; ii) parallel projection onto the
image plane; and iii) a 2D affine transformation of the
image.
In terms of inhomogeneous image world coordinates, the
affine camera is written
x
=
MX + tp
where M=
l
MuJ
is a 2 x 3 matrix with elements Mu=
Pu and34
t
major property of the affine camera is that i t preserves
parallelism: lines that are parallel in the world remain
parallel in the image.
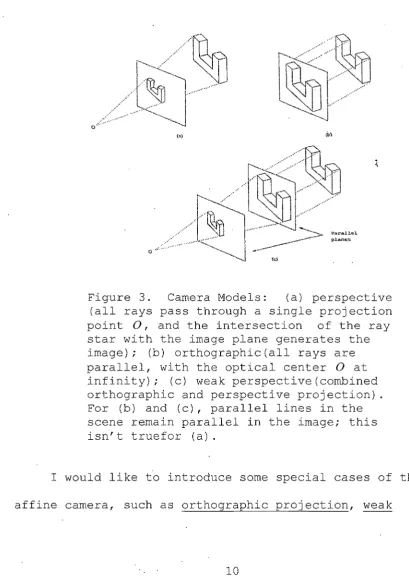
(o) (b\
Figure 3. Camera Models: (a) perspective (all rays pass through a single projection point 0, and the intersection of the ray star with the image plane generates the image); (b) orthographic (all rays are parallel, with the optical center Oat infinity) ; (c) weak perspective (combined orthographic and perspective projection). For (b) and (c), parallel lines in the scene remain parallel in the image; this isn't truefor (a).
I would like to introduce some special cases of the
perspective projection, and para-perspective projection
cameras.
The
parallel
onto the
orthographic projection camera is modeled by rays
to the optical axis projected orthographically
average depth plane
zc=
Z~.Wot1d point Xi: (X~ Z
1
Average depth '"ptn.ne'' f Image "plane" Optical cent.re ,, ; -..
Figure 4. One-dimensional Image Formation The image is the line
zc
=
f .For xP (perspective) projection is along the ray connecting the world point Xe to the optical center. For x0,.1h ( orthographic) ,
projection is perpendicular to the image. For x~ (para-perspective), Xe is first projected onto the average depth plane at angle 0, and then projected perspectively onto the image plane; x~ (weak perspective)
Next, we look at the weak perspective projection
camera. Consider the familiar camera centered perspective
equations, where each point is scaled by its individual
depth
z~
and all projection rays converge to the opticalcenter:
In above equation, Xe= (
Xe,Ye,ze)
denotes coordinates in thecamera frame. When the camera field of view is small and
the depth variation of the object ~
Zt
=
Zt -z;.,e
is smallcompared to the average distance of the object from the
camera
z;ve,
the indi victual depthszt
maybe approximated byZ~, giving a weak perspective or scaled orthographic
camera:
We can say the weak perspective camera is a combination of
the orthographic and perspective projection. Coordinates
measured in a world coordinate system (X) are related to Xe
translation vector representation the origin of the world
frame. The depth of a point Xi measured along the line of
sight in the camera frame is then Zt
=
R;Xi+ Tz. The centerof the point set is denoted
x_
and the depth variati6n ofthe object is given by jj_ZiC
=
RT 3 (Xi- Xave) • The weak perspective projection equations are thenX
y
z
1
Next, we look at para-perspective camera. The
para-perspective camera generalizes weak para-perspective case, such
that projection of the scene point onto the average depth
plane occurs parallel to the optic axis by projecting
direction. Since the average depth plane remains parallel
to the image plane, the perspective projection stage simply
introduces a scale factor. The lD case takes the form
Xpp
=
~
(Xe -/j_Zc cot0),zave
where 0 denotes the angl~ between the projection direction
and the positive X-axis. In the 2D case, the projection
in the X-Z plane and 0Y is the equivalent angle in the
Y-Z
plane. Factoring in camera calibration parameters andthe rigid transformation between the camera and world
coordinate frames gives
cot0x! cot0Y
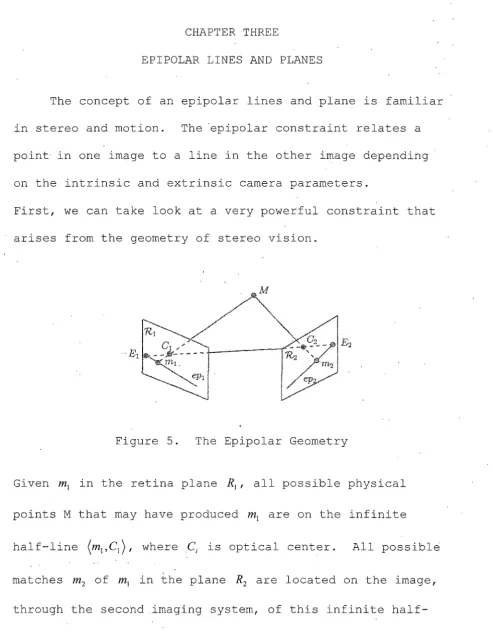
CHAPTER THREE
EPIPOLAR LINES AND PLANES
The concept of an epipolar lines and plane is familiar
in stereo and motion. The ·epipolar constraint relates a
point in one image to a line in the other image depending
on the intrinsic and extrinsic camera parameters.
First, we can take look at a very powerful constraint that
arises from the geometry of stereo vision.
Figure 5. The Epipolar Geometry
Given m1 in the retina plane R1 , all possible physical
points M that may have produced m1 are on the infinite
half-line (mi,C1) , where .Ci is optical center. All possible
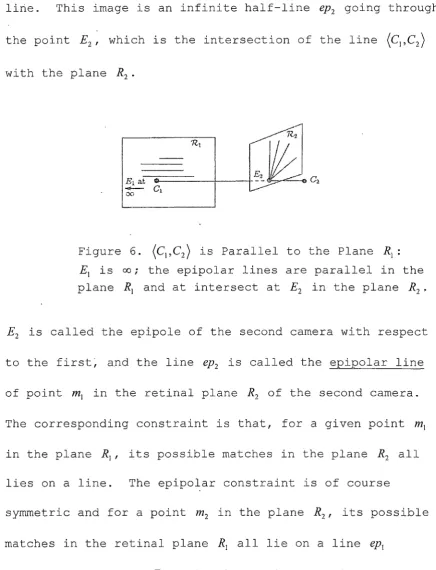
half-lirie. This image is an infinite half-line ep2 going through
the point E2 , which is the intersection of the line (Ci,C2 )
with the plane R2 •
Figure 6. (Ci,C2 ) is Parallel to the Plane R1 :
is oo; the epipolar lines are parallel in the E1
plane R1 and at intersect at E2 in the plane R2 ,
is called the epipole of the second camera with respect
E2
to the first~ and the line ~ 2 is called the epipolar line
of point m1 in the retinal plane R2 of the second camera.
The corresponding constraint is that, for a given point m1
in the plane
R
1, its possible matches in the planeR
2 alllies on a line. The epipolar constraint is of course
symmetric and for a point m2 in the plane R2 , its possible
matches in the retinal plane R1 all lie on a line ep1
line (Ci,C2 ) with the plane R1 • The lines ep1 and ePz are the
intersections of the plane C1MC2 , called the epipolar plane
defined by M, with the planes R1 and R2 , respectively.
E2 at
00
Figure 7.
(c
1,C2 ) is Parallel to the PlanesR, and R2 : E1 and E2 are at oo; the epipolar lines are parallel in both planes R1 and R2 •
When the plane
R
1 or the planeR
2 , or both, are parallel tothe line (Ci,C2 ) , one or both epipoles go to infinity and the
epipolar lines in one plane or both become parallel. The
situation where both planes are parallel to the line (C1,C2)
is often assumed because of its simplicity. Let's compute
the epipolar geometry. In this section, the notation~ is
to indicate projective quantities. For example, x denotes
multiplicative nonzero scalar, and x denotes a vector of
Rn. Let mi'= P1 M and m2
=
P2 M be two cameras. Thecoordinates of the two optical centers, C, (i= 1,2), in the
world reference frame, are obtained by solving the
following two systems of linear equations: P,M= 0, where
i
=
l,2.Since each epipole E1 is the image by the ith camera of the
other camera's optical center C1 ( j
*
i), the imagecoordinates of the epipoles Ei are obtained by applying
matrices PI to the vectors C 1 ( i, j = l , 2 , i
*
j ) .Now, I like to show how, for a given point m1 in the plane
R1 , the corresponding epipolar line ep1 can be computed. We
need to points to determine a line. One of them is the
- - [ P,-1 ]
epipole E2 , which is given by e2
=
P2 - \ Pi , and anotherpoint is the point at infinity of the optical ray
(C
1,m1) .The image m2 of this point in the second retinal plane is
- ~
written a Fm1 where Fis a 3x3 matrix. If we let E2 be
the 3x3 antisymmetric matrix representing the cross product
with e2 • We have F
=
E2 P2f>i.-1
• Any pixel m2 on the epipolar
~ T
line ep2 of m1 satisfies the equation m2 F m1
=
0. It showsin particular that the roles of m1 and m2 are symmetric and
that the epipolar line of a pixel m2 in the first retinal
CHAPTER FOUR
RECOGNITION OF RIGID THREE DIMENSIONAL MOTION FROM
SEQUENECS OF TWO DIMENSIONAL IMAGES
A recognition polynomial is a polynomial in the image
data (i.e., the coordinates of the points in the given
view) that evaluates to zero when the image data are
consistent with those from.rigid motions of a given 3-D
object. Using a Kontsevich's approach, we can derive
explicit recognition polynomials for the detection of rigid
3-D motion from two weak-perspective views. I would like
to introduce Kontsevich's derivation of the two-view
rigidity constraint in weak perspective projection.
Kontsevich used some of the same geometric ideas as in
Koenderink and van Doorn, notably the decomposition of
rigid rotation into a rotation about the viewing direction
and a rotation about an axis in the image plane. The
motions we consider are rigid rotations in 3-D space or
translations along the viewing direction that followed by
uniform scaling so we can ignore translations parallel to
Suppose we have an object that has five distinguished
points, labelled "0, 1, 2, 3, and 4." Let
0
be thedisplacement in
R
3 between pointO
and point j, in thefirst view (with j =1, 2, 3, 4) . Then
r;
is thecorresponding displacement, in R3 , in the second view. And
let ff be the orthographic projection to the image plane,
then the projected displacement can be written
R3 The fact is given an image plane, any rigid rotation in
can be thought of as a composition of two rotations. The
first is.a rotation about a unit axis vector v parallel to
the image plane and second is a rotation about an axis
vector perpendicular to the image plane. The second
rotation takes the first axis vector v to a new unit vector
v1 in the image plane. If the uniform scaling factor is s,
1
1 1
then we can let V = - V .
s
Consider the first of the decomposed rotations, around the
axis v. Then the respective projections of
0
and p1 ontov are equal and the second rotation takes v to v1• If we
denote 7z-(r))
=
p),
then the respective projections of r) and1
p}
onto v are equal, and that these projections are thesame as those rigid of~ and p1 onto v. Thus p1 ·v=p1 I ·v. I
Finally, consider the scaling. Since 7l" is orthographic,
the scaling factor of s results in p~=~} and, in equation
v'=!v
1, we can arrive at the linear Kontsevich equations:
s
0
P1 ·V-P1I ·VI
= '
with
llvll =l, llv'JJ =
M,
IIP'JI =silPII ·
s
The equation p1 -v-p~·v'=0 is a homogeneous system of four
linear equations in the four unknown coordinates c1, c2 ,
c;,
whereIf we let p1 =
[;J ,
p; = [ ; ] ·, the condition for there to be a nontrivial solution to equation p1 •v-p~ ·v'=
0 is that thecoefficient matrix have rank less than 4. Thus v and v' can
be known only up to an overall scale factor; choosing a
factor s from the equation
llv'II
=
M.
This completes thes
exposition of Kontsevitch's two-view derivation.
Now, take look at how a recognition polynomial arises
for the two-view weak perspective recognition of rigid
motion. This is a polynomial in the 16 data values
{ x1 ,y1 ,x:,y:} J=l, ...,4 which must evaluate to zero for there to be
a rigid interpretation. The condition that equation
p1 · v-p: · v'
=
0 has a nontrivial solution is then that thedeterminate of the coefficient matrix vanish. Ignoring the
negative signs in the last two columns of this matrix, we
get:
X1
Y1
x'I y;X2
Y2
X2 IY2
Idet =0
X3
Y3
X3 I y; X4Y4
x'4 y~Therefore the two-view recognition polynomial is the
determinant in above.
The recognition polynomial is a polynomial in 16 variables,
corresponding to the image plane coordinates of the weak
perspective projections of four feature points in each of
the two views. To use the polynomial for the detection of
actual object with, say, five feature points, an observer
can choose one of the points. Then, if the image
coordinates of the four remaining feature points in the two
views satisfy the recognition polynomial, we may infer that
the 3-D motion is rigid with probability one. To use the
polynomial for the recognition of a given object, suppose
we know the image plane coordinates of five feature points
on the object. We can use these coordinates to assign
numerical values to those variables in the polynomial which
correspond to the first view. This gives a reduced
polynomial in eight variables. Then, given a view of a
novel object with four feature points, we can plug the
image plane coordinates of these points into the reduced
polynomial, and if the result is 0, we may infer that the
novel object coincides with the memory object with
probability one.
Theorem: Let A be a 4x4 matrix with rank 3. Let A be the
3x4 matrix obtained from A by deleting the last row. Let
A; be the ith column of A.
cI
= -
det(A 2 , A 3 , A 4 )I - -
-cI
= -
det(A 1 , A 2 , A 4 )is a nontrivial solution to Ax= 0. Moreover, if both of
the 2x2 diagonal minors of A are nonsingular, then in this
I I
solution both vectors ( c"c2 ) T and ( c1 ,c2 ) T are nonzero.
Lemma: Let A(k) be the 3 x 4 matrix obtained from A by
deleting the kth row. Let·C(k) be the vector (c1,c2 ,c1 ,c2 )T
I I
obtained from A(k) as C = (c"c2 ,c1 ,c2 ) T is from A . Then C is a
CHAPTER FIVE
RECONSTRUCTION OF THREE DIMENSIONAL MOTION FROM SEQUENCES OF TWO DIMENSIONAL IMAGES
Kontsevich performed a change of.coordinates so as to
simplify the depth reconstruction. To this end, define
A - ~ I
ev,
=
(c/ + c~) 2(c1
A A A A
Thus eu,ev,ez (where ez is the unit vector perpendicular to
the image plane) forms an orthogonal coordinate system, as
A A A
does e11,,ev',ez.
A I A
Now define the u coordinates in the new systems:
11 -C2XJ +C1Y1
Note that the v,v I
coordinates, defined similarly, are equal
for corresponding points. Now let the z-coordinate of the
edge r be r1,z • For each angle
a,
we have1
. ) (P1,11J
P~,11,
= (
cosa -smarJ,=
=
PJ,u cosa- r1,z smaHence
r1,z
=
p J,u cota - P~,11, csca , \/a .Letting ,1,
=
cota,µ=
csca, we have:CHAPTER SIX
SOME THEOREMS IN LINEAR ALGEBRA
Euler's Theorem: Any RE S0(3) can be written R = R;RJ'R;,
where (¢,0,lf/) are Euler angles of R and R: is a rotation
through angle¢ around the·positive Z-axis.
S2
Proof: Let n be the north pole of • If BE S0(3) with
Bn =Rn, set C
=
RB-1 • Then CE S0(3) and R =CB; CBn = Bn .i.e., C is a rotation about Bn (and Rn).
Now 30 such that R%n has the same latitude as Rn and 3¢
such that R;, (R%n) = Rn . (:.we can set R;,R%=B)
i.e. , R
=
CR¢R% where C is a rotation about Rn= Bn .I\ I\ I\
Lemma: If A is a rotation about r and Br= u, for some
I\
rotation B then BAB-1 is a· rotation about u.
I\
Proof: (BAB-1)u = BAB-1Br
I\
=BAJr
I\
=BAr
I\
=Br
I\
As a consequence, we can say that any rotation C about
u
=
Br is of the form BAB-1, where A is a rotation about r,since by the lemma, A= B-1CB is a rotation about r
=
B-1u.Then C
=
BAB-1 •Now with R =CB, ( B
=
R;R%) and C is a rotation aboutBn(= Rn), we have that C
=
BDB-1 with D=
R;.Finally R
=
BDB-1B
=BD
Theorem: Let A be a 3x3 matrix with rank 2. Let A be the
3x3 matrix obtained from A by deleting the last row. Let
A; be the ith column of A.
Then the vector C = ( c1 , c2 , c3 ) T defined by
c1 = -det ( A 2 , A 3 )
c2 = det ( A 1 , A 3 )
is a nontrivial solution to A x
=
0 and C; =/:- 0 .Proof: Expanding the determinant of A off the nth row, we
-a31det(A 2,A 3J + a 32 det(A 1,A 3 J - a 33 det(A 1,A 2 l= 0,since A has
rank less than n. That is, a31 c1 +a32 c2 +a33 c3 = 0.
Thus the vector C
= (
c1 , c2, c3) T is orthogonal to the row A3 •By the theory of determinants C is orthogonal to all the
rows of A, i.e., is a solution to Ax= 0.
Moreover, since A has rank exactly 2, C can not be the zero
vector. I.I
Let's check if AC= 0.
12 13 a11c1 + a c 2 + a c 3
l-a21C1+
a22C2+
a23C3-a31C1 + a32C2 + a33C3
l
all a12 a13
a21 a22 a23
n,
C2=
0 C3a31 a32 a33
- 2 - 3 -1 - 3 - \ - 2
- a11 det(A ,A )+a12 det(A ,A ) - a31 det(A ,A )
- 2 - 3 - \ - 3 -1 - 2
- a21 det(A ,A )+a22 det(A ,A ) - a32 det(A ,A)
- 2 - 3 - 1 - 3 - J - 2
- a 31 det(A ,A ) + a 32 det(A ·, A )-a 33 det(A , A )
If 2x2 minors of A are nonsingular than in this solution
vectors c;'s are nonzero.
Let c1
=
0, then from AC= 0 we inf erSince C =J:. 0 and we are assuming c1
=
0,nontrivial solution to 3x3 system. This contradicts 2x2
minors of A are nonsingular. Therefore c1 =J:. 0. A similar
argument holds for c2= 0 and c3 = 0. Thus c;'s are nonzero
Theorem: Let A be a nxn matrix with rank n-1. Let A be
the (n-l)xn matrix obtained from A by deleting the last
row. Let A; be the i th column of A . Then the vector C =
... , en) T defined by
c1 = -det (
A
2, A 3 , A 4 , ••• , A 11 )
A 11
=
det ( A 1, A 3 , A 4 , ••• , )
C 2
c3
=
-det ( A 1 , A 2 , A 4 , ••• , A 11 )CI. = (- 1) ; d et ( A
1
f A
2
f ••• f A i-1 f A i+l f ••• f A)
A 2 , A n-1)
en= (-1) ndet ( A 1 ' A 3'
,
...is a nontrivial solution to A x
=
0.Proof: Expanding the determinant of A off the nth row, we
get
- 2 - 3 An A' A3
n A I A 2 A n-1
(-1) anndet( , , .•. I )= 0, since A has rank less than n .
That is, a111c,+an2C2+ •.. +a1111cn= 0.
Thus the vector C
= (
c1 , c2 , c3 , ... , en) T is orthogonal to therow A11 • By the theory of ~eterminant C is orthogonal to
all the rows of A, i.e., is a solution to Ax= 0.
Let's check if AC= 0.
0
G11C1 + G12C2
+
G13C3 •••+
alnCnG21C1 + G22C2 + G23C3 • • • + Gz,,C11
- 2 - 3 - 1 1 - I - 3 - n - J - 2 -n-1
det(A ,A , ... ,A )+a12 det(A ,A , ... ,A )+ ... +(-1)11
det(A ,A , ... ,A )
-a11 a111
- 2 - 3 - n - I - 3 - n - I - 2 -n-1
-a21 det(A ,A , ... ,A )+a22 det(A ,A , ... ,A )+ ... +(-1)11
det(A ,A , ... ,A ) a211
- ? - 3 - n - I - 3 - n - I - ? -11-I
det(A-,A , ... ,A )+a det(A ,A , ... ,A )+ ... +(-l)"a det(A ,A-, ... ,A )
-a111 112 1111
=
(0,0, ... ,0) T .Theorem: Let A be a 4x4 matrix with rank 2. Then we
provide a general algorithm for finding a basis of the null
Proof: Let B be the row-reduced matrix obtained from A .
Rearrange if necessary so that the last two rows of B are
zero.
all Ql2 G13 al4
G21 G22 G23 G24
0 0 0 0
0 0 0 0 X1
X2
X3
X4
=
Let B be the 3x4 matrix obtained from
- ;
last row. Let B be the ith column of
0
0
0
0
B by deleting its
B. The null set of
A and B are identical (subject to the rearranging
described above), so i t suffices to find solutions to
Bx= 0 . Solutions can be found as follows.
If we let x4 =0, then the solution will be
-2 -3
= det(B ,B ) =
x1 a12 a23 -a13a22 -1 - 3
= -det(B ,B ) = -(aua23
x2 -a13 a21 )
- ] - 2
x3 = det(B ,B ) = aua22 -aI2 a21 )
If we let x3 =0, then the solution will be
- 1 - 2 =-det(B ,B) =
If we let x2 =0, then the solution will be
- 3 - 4
=
-det(B , B )=
x1 a13 a24 -a14 a23
- I - 3
=
-det(B ,B )=
x4 a11 a23 -a13 a21
If we let x1 = 0, then the solution will be
- 3 - 4
=
-det(B ,B )=
x2 a13 a24 -a14 a23
In each case it is verified by direct computation that the given vector is a solution.
The question is: are any of these vectors non-trivial?
Since B has rank 2, at least one 2x2 sub-matrix of the
matrix consisting of the first two rows has to be nonzero
(since the matrix has rank 2 and any other 2x2 sub-matrix
has automatically zero determinants).
By inspection of the solutions given above, we see that
this particular 2x2 determinant, whatever i t is, appears in
two distinct vectors, both of which are therefore non
trivial.
Furthermore, these two vectors must be linearly
other. Thus they form a basis of the two-dimensional
REFERENCES
1. Oliver Faugeras, Three-dimensional computer vision: a geometric viewpoint. Massachusetts Institute of Technology press, 1999
2. M. Brady, L. s. Shapiro, and A. Zisserman, "Three dimensional motion recovery via affine epiploar
geometry." Internation Jounal of Computer Vision, 16, 147-182 (1995)
3. B. M. Bennett, D. D. Hoffman, and C. Prakash,