R E S E A R C H
Open Access
On solving split equilibrium problems and
fixed point problems of nonspreading
multi-valued mappings in Hilbert spaces
Suthep Suantai
1*, Prasit Cholamjiak
2, Yeol Je Cho
3,4and Watcharaporn Cholamjiak
2*Correspondence:
1Department of Mathematics,
Faculty of Science, Chiang Mai University, Chiang Mai, 50200, Thailand
Full list of author information is available at the end of the article
Abstract
In this paper, we introduce and study iterative schemes for solving split equilibrium problems and fixed point problems of nonspreading multi-valued mappings in Hilbert spaces and prove that the modified Mann iteration converges weakly to a common solution of the considered problems. Moreover, we present some examples and numerical results for the main results.
MSC: 47H10; 54H25
Keywords: nonspreading multi-valued mapping; split equilibrium problem; fixed point problem; weak convergence; Hilbert space
1 Introduction
In the following, letHandHbe real Hilbert spaces with the inner product·,·and the
norm · . LetCbe a nonempty subset ofH. Theequilibrium problemis to find a point
ˆ
x∈Csuch that
F(x,ˆ y)≥ (.)
for ally∈C. Since its inception by Blum and Oettli [] in , the equilibrium problem (.) has received much attention due to its applications in a large variety of problems arising in numerous problems in physics, optimizations, and economics. Some methods have been rapidly established for solving this problem (see [–]).
Very recently, Kazmi and Rizvi [] introduced and studied the following split equilib-rium problem:
LetC⊆HandQ⊆H. LetF:C×C→RandF:Q×Q→Rbe two bifunctions. Let
A:H→Hbe a bounded linear operator. Thesplit equilibrium problemis to findxˆ∈C
such that
F(ˆx,x)≥ for allx∈C (.)
and such that
ˆ
y=Aˆx∈QsolvesF(ˆy,y)≥ for ally∈Q. (.)
Note that the problem (.) is the classical equilibrium problem and we denote its solu-tion set byEP(F). The inequalities (.) and (.) constitute a pair of equilibrium problems
which have to find the imageyˆ=Aˆx, under a given bounded linear operatorA, of the so-lution xˆ of (.) inH is the solution of (.) inH. We denote the solution set of (.)
byEP(F). The solution set of the split equilibrium problem (.) and (.) is denoted by
={z∈EP(F) :Az∈EP(F)}.
A subsetC⊂His said to beproximinalif, for eachx∈H,
x–y=d(x,C) =infx–z:z∈C.
Let CB(C), K(C), andP(C) denote the families of nonempty closed bounded subsets, nonempty compact subsets and nonempty proximinal bounded subset ofC, respectively. TheHausdorff metriconCB(C) is defined by
H(A,B) =max
sup
x∈A
d(x,B),sup
y∈B
d(y,A)
for allA,B∈CB(C) whered(x,B) =infb∈Bx–b. An elementp∈Cis called afixed point ofT:C→CB(C) ifp∈Tp. The set of fixed points ofT is denoted byF(T). We say that T:C→CB(C) is:
() nonexpansiveif
H(Tx,Ty)≤ x–y
for allx,y∈C; () quasi-nonexpansiveif
H(Tx,Tp)≤ x–p
for allx∈Candp∈F(T).
Recently, the existence of fixed points and the convergence theorems of multi-valued mappings have been studied by many authors (see [–]).
Hussain and Khan [] presented the fixed point theorems of a *-nonexpansive multi-valued mapping and the strong convergence of its iterates to a fixed point defined on a closed and convex subset of a Hilbert space by using the best approximation operator PTx, which is defined byPTx={y∈Tx:y–x=d(x,Tx)}. The convergence theorems
and its applications in this direction have been established by many authors (for instance, see [, , ]).
In , Song and Cho [] gave the example of a multi-valued mappingT which is not necessary nonexpansive, butPT is nonexpansive. This is an important tool for studying
the fixed point theory for multi-valued mappings.
Kohsaka and Takahashi [] introduced a class of mappings which is called nonspread-ing mappnonspread-ing. LetCbe a subset of Hilbert spacesH. A mappingT:C→Cis said to be
nonspreadingif
for allx,y∈C. Subsequently, Iemoto and Takahashi [] showed thatT:C→Cis non-spreading if and only if
Tx–Ty≤ x–y+ x–Tx,y–Ty
for allx,y∈C.
Very recently, Liu [] introduced the following class of valued mappings: a multi-valued mappingT:C→CB(C) is said to benonspreadingif
ux–uy≤ ux–y+uy–x
for someux∈Txanduy∈Tyfor allx,y∈C. He proved a weak convergence theorem for
finding a common element of the set of solutions of an equilibrium problem and the set of common fixed points.
In this paper, we introduce, by using Hausdorff metric, the class of nonspreading multi-valued mappings. We say that a mappingT:C→CB(C) is ak-nonspreading multi-valued mappingif there existsk> such that
H(Tx,Ty)≤kd(Tx,y)+d(x,Ty) (.)
for allx,y∈C.
It is easy to see that, ifTis-nonspreading, thenTis nonspreading in the case of single-valued mappings (see [, ]). Moreover, ifT is a -nonspreading andF(T)=∅, thenT is quasi-nonexpansive. Indeed, for allx∈Candp∈F(T), we have
H(Tx,Tp)≤d(Tx,p)+d(x,Tp)
≤H(Tx,Tp)+x–p.
It follows that
H(Tx,Tp)≤ x–p. (.)
We now give an example of a -nonspreading multi-valued mapping which is not non-expansive.
Example . ConsiderC= [–, ] with the usual norm. DefineT:C→CB(C) by
Tx=
{}, x∈[–, ]; [–|x|x|+| , ], x∈[–, –).
Now, we show thatTis-nonspreading. In fact, we have the following cases: Case : Ifx,y∈[–, ], thenH(Tx,Tx) = .
Case : Ifx∈[–, ] andy∈[–, –), thenTx={}andTy= [–|y|y|+| , ]. This implies that
H(Tx,Ty)= |y| |y|+
Case : Ifx,y∈[–, –), thenTx= [–|x||x+| , ] andTy= [–|y||y+| , ]. This implies that
H(Tx,Ty)= |x| |x|+ –
|y| |y|+
< <d(Tx,y)+d(x,Ty).
On the other hand,Tis not nonexpansive since forx= – andy= –, we haveTx={} andTy= [–, ]. This shows thatH(Tx,Ty) =>=|– – (–)|=x–y.
In , Mann [] introduced the following iterative procedure to approximate a fixed point of a nonexpansive mappingTin a Hilbert spaceH:
xn+=αnxn+ ( –αn)Txn (.)
for eachn∈N, where the initial pointxis taken inCarbitrarily and{αn}is a sequence in
[, ].
Motivated by the previous results, in this paper, we introduce and study the Mann-type iteration to approximate a common solution of the split equilibrium problem and the fixed point problem for a-nonspreading multi-valued mapping and prove some weak conver-gence theorems in Hilbert spaces. Finally, we give some examples and numerical results to illustrate our main results.
2 Preliminaries
We now provide some results for the main results. In a Hilbert space H, let C be a
nonempty closed convex subset ofH. For every pointx∈H, there exists a unique nearest
point ofC, denoted byPCx, such thatx–PCx ≤ x–yfor ally∈C. Such aPCis called
the metric projection fromHontoC. We know thatPCis a firmly nonexpansive mapping
fromHontoC,i.e.,
PCx–PCy≤ PCx–PCy,x–y, ∀x,y∈H.
Further, for anyx∈Handz∈C,z=PCxif and only if
x–z,z–y ≥, ∀y∈C.
A mappingA:C→His calledα-inverse strongly monotoneif there existsα> such that
x–y,Ax–Ay ≥αAx–Ay, ∀x,y∈C.
Lemma . Let Hbe a real Hilbert space.Then the following equations hold:
() x–y=x–y– x–y,yfor allx,y∈H;
() x+y≤ x+ y,x+yfor allx,y∈H ;
() tx+ ( –t)y=tx+ ( –t)y–t( –t)x–yfor allt∈[, ]andx,y∈H ;
() If{xn}∞n=is a sequence inHwhich converges weakly toz∈H,then
lim sup
n→∞ xn–y
=lim sup
n→∞ xn–z
+z–y
A spaceXis said to satisfyOpial’s conditionif, for any sequencexnwithxnx, then
lim inf
n→∞ xn–x<lim infn→∞ xn–y
for ally∈Xwithy=x. It is well known that every Hilbert space satisfies Opial’s condition.
Lemma .[] Let X be a Banach space which satisfies Opial’s condition and{xn}be a
sequence in X.Let u,v∈X be such thatlimn→∞xn–uandlimn→∞xn–vexist.If{xnk} and{xmk}are subsequences of {xn}which converge weakly to u and v,respectively,then u=v.
Assumption .[] LetF:C×C→Rbe a bifunction satisfying the following
assump-tions:
() F(x,x) = for allx∈C;
() Fis monotone,i.e.,F(x,y) +F(y,x)≤for allx∈C;
() for eachx,y,z∈C,lim supt→+F(tz+ ( –t)x,y)≤F(x,y);
() for eachx∈C,y→F(x,y)is convex and lower semi-continuous.
Lemma .[] Assume that F:C×C→Rsatisfies Assumption..For any r> and
x∈H,define a mapping TrF:H→C as follows:
TF
r (x) =
z∈C:F(z,y) +
ry–z,z–x ≥,∀y∈C
.
Then the following hold: () TF
r is nonempty and single-valued;
() TF
r is firmly nonexpansive,i.e.,for anyx,y∈H, TF
r x–TrFy
≤TF
r x–TrFy,x–y
;
() F(TF
r ) =EP(F);
() EP(F)is closed and convex.
Further, assume thatF:Q×Q→Rsatisfying Assumption .. For eachs> andw∈
H, define a mappingTsF:H→Qas follows:
TF
s (w) =
d∈Q:F(d,e) +
se–d,d–w ≥,∀e∈Q
.
Then we have the following: () TF
s is nonempty and single-valued;
() TF
s is firmly nonexpansive;
() F(TF
s ) =EP(F,Q);
() EP(F,Q)is closed and convex.
Condition (A) LetHbe a Hilbert space andCbe a subset ofH. A multi-valued mapping
T:C→CB(C) is said to satisfyCondition(A) ifx–p=d(x,Tp) for allx∈Handp∈
Remark . We see thatT satisfies Condition (A) if and only ifTp={p}for allp∈F(T). It is well known that the best approximation operatorPT, which is defined byPTx={y∈
Tx:y–x=d(x,Tx)}, also satisfies Condition (A).
3 Main results
Now, we are ready to prove some weak convergence theorem for -nonspreading multi-valued mappings in Hilbert spaces. To this end, we need the following crucial results.
Lemma . Let C be a closed and convex subset of a real Hilbert space H and T:C→
K(C)be a k-nonspreading multi-valued mapping such that k∈(,].If x,y∈C and a∈Tx, then there exists b∈Ty such that
a–b≤H(Tx,Ty)≤ k –k
x–y+ x–a,y–b.
Proof Letx,y∈Canda∈Tx. By Nadler’s theorem (see []), there existsb∈Tysuch that
a–b≤H(Tx,Ty).
It follows that
kH(Tx,Ty)
≤d(Tx,y)+d(x,Ty) ≤ a–y+x–b
≤ a–x+ a–x,x–y+x–y+x–a+ x–a,a–b+a–b
= a–x+x–y+a–b+ a–x,x–a– (y–b)
≤a–x+x–y+H(Tx,Ty)+ a–x,x–a– (y–b).
This implies that
H(Tx,Ty)≤ k –k
x–y+ x–a,y–b.
This completes the proof.
Lemma . Let C be a closed and convex subset of a real Hilbert space Hand T:C→
K(C)be a k-nonspreading multi-valued mapping such that k∈(,].Let{xn}be a sequence
in C such that xnp andlimn→∞xn–yn= for some yn∈Txn.Then p∈Tp.
Proof Let{xn}be a sequence inCwhich converges weakly topand letyn∈Txnbe such
thatxn–yn →.
Now, we show thatp∈F(T). By Lemma ., there existszn∈Tpsuch that
yn–zn≤
k –k
xn–p+ xn–yn,p–zn
SinceTpis compact andzn∈Tp, there exists{zni} ⊂ {zn}such thatzni→z∈Tp. Since {xn}converges weakly, it is bounded. For eachx∈H, define a functionf :H→[,∞) by
f(x) :=lim sup
i→∞
k
–kxni–x
.
Then, by Lemma .(), we obtain
f(x) =lim sup
i→∞ k –k
xni–p
+p–x
for allx∈H. Thusf(x) =f(p) +–kkp–xfor allx∈H. It follows that
f(z) =f(p) + k
–kp–z
. (.)
We observe that
f(z) =lim sup
i→∞
k
–kxni–z
=lim sup
i→∞
k
–kxni–yni+yni–z
≤lim sup
i→∞ k
–kyni–z
.
This implies that
f(z)≤lim sup
i→∞ k
–kyni–z
=lim sup
i→∞
k –k
yni–zni+zni–z
≤lim sup
i→∞
k –k
xni–p
+ x
ni–yni,p–zni
≤lim sup
i→∞ k
–kxni–p
=f(p). (.)
Hence it follows from (.) and (.) thatp–z= . This completes the proof.
Theorem . Let H,Hbe two real Hilbert space and C⊂H,Q⊂Hbe nonempty closed
convex subsets of Hilbert spaces H and H,respectively.Let A:H→Hbe a bounded
linear operator and T:C→K(C)a-nonspreading multi-valued mapping.Let F:C×
C→R,F:Q×Q→Rbe bifunctions satisfying Assumption.and Fis upper
semi-continuous in the first argument.Assume that T satisfies Condition(A)and=F(T)∩= ∅,where={z∈C:z∈EP(F)and Az∈EP(F)}.Let{xn}be a sequence defined by
⎧ ⎪ ⎨ ⎪ ⎩
x∈C arbitrarily,
un=TrFn(I–γA∗(I–T
F
rn)A)xn,
xn+∈αnxn+ ( –αn)Tun,
(.)
for all n≥,where{αn} ⊂(, ),rn⊂(,∞),andγ ∈(, /L)such that L is the spectral
() <lim infn→∞αn≤lim supn→∞αn< ;
() lim infn→∞rn> .
Then the sequence{xn}defined by(.)converges weakly to p∈.
Proof We first show thatA∗(I–TF
rn)Ais a
L-inverse strongly monotone mapping. Since
TF
rn is firmly nonexpansive andI–T
F
rn is -inverse strongly monotone, we see that
A∗I–TF
rn
Ax–A∗I–TF
rn
Ay =A∗I–TF
rn
(Ax–Ay),A∗I–TF
rn
(Ax–Ay)
=I–TF
rn
(Ax–Ay),AA∗I–TF
rn
(Ax–Ay)
≤LI–TF
rn
(Ax–Ay),I–TF
rn
(Ax–Ay)
=LI–TF
rn
(Ax–Ay)
≤LAx–Ay,I–TF
rn
(Ax–Ay)
=Lx–y,A∗I–TF
rn
Ax–A∗I–TF
rn
Ay
for allx,y∈H. This implies thatA∗(I–TrFn)Ais aL-inverse strongly monotone mapping. Sinceγ∈(,L), it follows thatI–γA∗(I–TF
rn)Ais nonexpansive. Now, we divide the proof into six steps as follows:
Step. Show that{xn}is bounded.
Letp∈. Thenp=TF
rnpand (I–γA∗(I–T
F
rn)A)p=p. Thus we have
un–p=TrFn
I–γA∗I–TF
rn
Axn–TrFn
I–γA∗I–TF
rn
Ap
≤I–γA∗I–TF
rn
Axn–
I–γA∗I–TF
rn
Ap
≤ xn–p. (.)
It follows that
xn+–p ≤αnxn–p+ ( –αn)zn–p for somezn∈Tun
≤αnxn–p+ ( –αn)d(zn,Tp)
≤αnxn–p+ ( –αn)H(Tun,Tp)
≤ xn–p.
Hencelimn→∞xn–pexists.
Step. Show thatzn–xn → asn→ ∞for allzn∈Tun. From Lemma . andT
satisfying Condition (A), we have
xn+–p≤αnxn–p+ ( –αn)zn–p–αn( –αn)xn–zn
=αnxn–p+ ( –αn)d(zn,Tp)–αn( –αn)xn–zn
≤αnxn–p+ ( –αn)H(Tun,Tp)–αn( –αn)xn–zn
≤αnxn–p+ ( –αn)un–p–αn( –αn)xn–zn
This implies that
αn( –αn)xn–zn≤ xn–p–xn+–p.
From Condition () and the existence oflimn→∞xn–p, we have
lim
n→∞xn–zn= . (.)
Step. Show thatun–zn → asn→ ∞for allzn∈Tun. For anyp∈, we estimate
un–p=TrFn
I–γA∗I–TF
rn
Axn–p
=TF
rn
I–γA∗I–TF
rn
Axn–TrFnp
≤xn–γA∗
I–TF
rn
Axn–p
≤ xn–p+γA∗
I–TF
rn
Axn+ γ
p–xn,A∗
I–TF
rn
Axn
.
Thus we have
un–p≤ xn–p+γ
Axn–TrFnAxn,AA
∗I–TF
rn
Axn
+ γp–xn,A∗
I–TF
rn
Axn
. (.)
On the other hand, we have
γAxn–TrFnAxn,AA
∗I–TF
rn
Axn
≤LγAxn–TrFnAxn,Axn–T
F
rnAxn
=LγAxn–TrFnAxn
(.)
and
γp–xn,A∗
I–TF
rn
Axn
= γA(p–xn),Axn–TrFnAxn
= γA(p–xn) +
Axn–TrFnAxn
–Axn–TrFnAxn
,Axn–TrFnAxn
= γAp–TF
rnAxn,Axn–T
F
rnAxn
–Axn–TrFnAxn
≤γ
Axn–T
F
rnAxn
–Axn–TrFnAxn
= –γAxn–TrFnAxn
. (.)
Using (.), (.), and (.), we have
un–p≤ xn–p+LγAxn–TrFnAxn
–γAxn–TrFnAxn
=xn–p+γ(Lγ – )Axn–TrFnAxn
It follows that, for allzn∈Tun,
xn+–p =αnxn+ ( –αn)zn–p
≤αnxn–p+ ( –αn)zn–p
=αnxn–p+ ( –αn)d(zn,Tp)
≤αnxn–p+ ( –αn)H(Tun,Tp)
≤αnxn–p+ ( –αn)un–p
≤αnxn–p+ ( –αn)
xn–p+γ(Lγ– )Axn–TrFnAxn
≤ xn–p+γ(Lγ – )Axn–TrFnAxn
.
Therefore, we have
–γ(Lγ– )Axn–TrFnAxn
≤ x
n–p–xn+–p.
Sinceγ(Lγ – ) < andlimn→∞xn–pexists, by (.), we obtain
lim
n→∞Axn–T
F
rnAxn= . (.)
SinceTF
rn is firmly nonexpansive andI–γA∗(T
F
rn –I)Ais nonexpansive, it follows that
un–p
=TF
rn
xn–γA∗
I–TF
rn
Axn
–TF
rnp
≤TF
rn
xn–γA∗
I–TF
rn
Axn
–TF
rnp,xn–γA
∗I–TF
rn
Axn–p
=un–p,xn–γA∗
I–TF
rn
Axn–p
=
un–p+xn–γA∗
I–TF
rn
Axn–p–un–xn–γA∗
I–TF
rn Axn ≤
un–p+xn–p–un–xn–γA∗
I–TF
rn Axn =
un–p+xn–p–
un–xn+γA∗
I–TF
rn
Axn
– γun–xn,A∗
I–TF
rn –I
Axn
,
which implies that
un–p≤ xn–p–un–xn+ γ
un–xn,A∗
I–TF
rn
Axn
≤ xn–p–un–xn+ γun–xnA∗
I–TF
rn
Axn. (.)
It follows from (.) that
xn+–p
≤αnxn–p+ ( –αn)d(zn,Tp)
≤αnxn–p+ ( –αn)H(Tun,Tp)
≤αnxn–p+ ( –αn)un–p
≤αnxn–p+ ( –αn)
xn–p–un–xn+ γun–xnA∗
I–TF
rn
Axn.
Therefore, we have
( –αn)un–xn≤γun–xnA∗
I–TF
rn
Axn+xn–p–xn+–p.
From Condition () and (.), we have
lim
n→∞un–xn= . (.)
From (.) and (.), we have
un–zn ≤ un–xn+xn–zn → (.)
asn→ ∞.
Step. Show thatxn+–xn → asn→ ∞. From (.) and (.), we have
xn+–un =αnxn+ ( –αn)zn–un
≤αnxn–un+ ( –αn)zn–un → (.)
asn→ ∞. From (.) and (.), we also have
un–un+ ≤ un–xn++xn+–un+ → (.)
asn→ ∞. It follows from (.) and (.) that
xn+–xn ≤ xn+–un+un–xn → (.)
asn→ ∞.
Step. Show thatωw(xn)⊂, whereωw(xn) ={x∈H:xnix,{xni} ⊂ {xn}}. Since{xn} is bounded andHis reflexive,ωw(xn) is nonempty. Letq∈ωw(xn) be an arbitrary element.
Then there exists a subsequence{xni} ⊂ {xn}converging weakly toq. From (.), it follows
thatuniqasi→ ∞. By Lemma . and (.), we obtainq∈F(T). Next, we show thatq∈EP(F). Fromun=TrFn(I+γA∗(I–T
F
rn)A)xn, we have
F(un,y) +
rn
y–un,un–xn–γA∗
I–TF
rn
Axn
≥
for ally∈C, which implies that
F(un,y) +
rn
y–un,un–xn–
rn
y–un,γA∗
I–TF
rn
Axn
for ally∈C. By Assumption .(), we have
rni
y–uni,uni–xni– rni
y–uni,γA
∗I–TF
rni
Axni
≥F(y,uni)
for ally∈C. Fromlim infn→∞rn> , from (.), (.), and Assumption .(), we obtain
F(y,q)≤
for ally∈C. For any <t≤ andy∈C, letyt=ty+ ( –t)q. Sincey∈Candq∈C,yt∈C,
and henceF(yt,q)≤. So, by Assumption .() and (), we have
=F(yt,yt)≤tF(yt,y) + ( –t)F(yt,q)≤tF(yt,y)
and henceF(yt,y)≥. SoF(q,y)≥ for ally∈Cby (.) and henceq∈EP(F). Since
Ais a bounded linear operator,AxniAq. Then it follows from (.) that
TF
rniAxniAq (.)
asi→ ∞. By the definition ofTF
rniAxni, we have
F
TF
rniAxni,y
+ rni
y–TF
rniAxni,T
F
rniAxni–Axni
≥
for ally∈C. SinceFis upper semi-continuous in the first argument and (.), it follows
that
F(Aq,y)≥
for ally∈C. This shows thatAq∈EP(F). Henceq∈.
Step. Show that{xn}and{un}converge weakly to an element of. It is sufficient to
show thatωw(xn) is single point set. Letp,q∈ωw(xn) and{xnk},{xnm} ⊂ {xn}be such that xnkpandxnmq. From (.), we also haveunk pandunmq. By Lemma . and (.), it follows thatp,q∈F(T). Applying Lemma ., we obtainp=q. This completes
the proof.
If Tp={p} for allp∈F(T), thenT satisfies Condition (A) and so we can obtain the following result.
Theorem . Let H,H be two real Hilbert spaces and C⊂H,Q⊂H be nonempty
closed convex subsets of Hilbert spaces H and H, respectively. Let A:H→H be a
bounded linear operator and T:C→K(C)a
-nonspreading multi-valued mapping.Let
F:C×C→R,F:Q×Q→Rbe bifunctions satisfying Assumption.and Fis upper
semi-continuous in the first argument.Assume that=F(T)∩=∅and Tp={p}for all p∈F(T),where={z∈C:z∈EP(F)and Az∈EP(F)}.Let{xn}be a sequence defined
by
⎧ ⎪ ⎨ ⎪ ⎩
x∈C arbitrarily,
un=TrFn(I–γA∗(I–T
F
rn)A)xn,
xn+∈αnxn+ ( –αn)Tun,
for all n≥,where{αn} ⊂(, ),rn⊂(,∞),andγ ∈(, /L)such that L is the spectral
radius of A∗A and A∗is the adjoint of A.Assume that the following conditions hold: () <lim infn→∞αn≤lim supn→∞αn< ;
() lim infn→∞rn> .
Then the sequence{xn}defined by(.)converges weakly to p∈.
SincePTsatisfies Condition (A), we also obtain the following results.
Theorem . Let H,H be two real Hilbert spaces and C⊂H,Q⊂H be nonempty
closed convex subsets of Hilbert spaces H and H, respectively. Let A:H→H be a
bounded linear operator and T:C→P(C)a multi-valued mapping.Let F:C×C→R,
F:Q×Q→Rbe bifunctions satisfying Assumption.and Fis upper semi-continuous
in the first argument.Assume that PTis-nonspreading multi-valued mapping and I–T
is demiclosed atwith=F(T)∩=∅,where={z∈C:z∈EP(F)and Az∈EP(F)}.
Let{xn}be a sequence defined by
⎧ ⎪ ⎨ ⎪ ⎩
x∈C arbitrarily,
un=TrFn(I–γA∗(I–T
F
rn)A)xn, xn+∈αnxn+ ( –αn)PTun,
(.)
for all n≥,where{αn} ⊂(, ),rn⊂(,∞),andγ ∈(, /L)such that L is the spectral
radius of A∗A and A∗is the adjoint of A.Assume that the following conditions hold: () <lim infn→∞αn≤lim supn→∞αn< ;
() lim infn→∞rn> .
Then the sequence{xn}defined by(.)converges weakly to p∈.
Proof By the same proof as in Theorem ., we haveun→zn∈PTun. This implies that
d(un,Tun)≤d(un,PTun)≤ un–zn → (.)
asn→ ∞. SinceI–Tis demiclosed at , we obtain this result.
4 Examples and numerical results
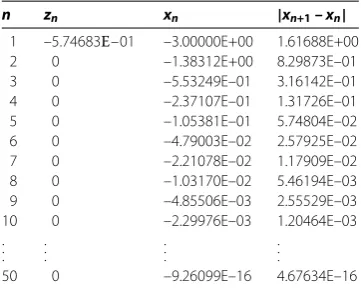
In this section, we give examples and numerical results for supporting our main theorem.
Example . LetH=H=R,C= [–, ], andQ= (–∞, ]. LetF(u,v) = (u– )(v–u)
for allu,v∈CandF(x,y) = (x+ )(y–x) for allx,y∈Q. Define two mappingsA:R→R
andT:C→K(C) byAx= xfor allx∈Rand
Tx=
{}, x∈[–, ]; [–|x|x|+| , ], x∈[–, –).
Chooseαn=nn+,rn=nn+, andγ=. It is easy to check thatFandFsatisfy all conditions
Table 1 Numerical results of Example 1.1 being randomized in the first time
n zn xn |xn+1– xn|
1 –5.74683E–01 –3.00000E+00 1.61688E+00 2 0 –1.38312E+00 8.29873E–01 3 0 –5.53249E–01 3.16142E–01 4 0 –2.37107E–01 1.31726E–01 5 0 –1.05381E–01 5.74804E–02 6 0 –4.79003E–02 2.57925E–02 7 0 –2.21078E–02 1.17909E–02 8 0 –1.03170E–02 5.46194E–03 9 0 –4.85506E–03 2.55529E–03 10 0 –2.29976E–03 1.20464E–03 .
. .
. . .
. . .
. . .
50 0 –9.26099E–16 4.67634E–16
Step. Findz∈Qsuch thatF(z,y) +ry–z,z–Ax ≥ for ally∈Q. Noting thatAx= x,
we have
F(z,y) +
ry–z,z–Ax ≥ ⇐⇒ (z+ )(y–z) +
ry–z,z– x ≥ ⇐⇒ r(z+ )(y–z) + (y–z)(z– x)≥ ⇐⇒ (y–z)( +r)z– (x– r)≥.
By Lemma ., we know thatTF
r Axis single-valued. Hencez=x+–rr.
Step. Finds∈Csuch thats=x–γA∗(I–TF
r )Ax. From Step , we have
s=x–γA∗I–TF
r
Ax=x–γA∗Ax–TF
r Ax
=x–γ x–(x– r) +r
= ( – γ)x+ γ
+r(x– r).
Step. Findu∈Csuch thatF(u,v) +rv–u,u–s ≥ for allv∈C. From Step , we
have
F(u,v) +
rv–u,u–s ≥ ⇐⇒ (u– )(v–u) +
rv–u,u–s ≥ ⇐⇒ r(u– )(v–u) + (v–u)(u–s)≥ ⇐⇒ (v–u)( +r)u– (s+r)≥.
Similarly, by Lemma ., we obtainu=s++rr=(–+γr)x+r+γ(+(xr–)r).
Step. Findxn+∈αnxn+ ( –αn)Tun, whereun=(–+γ)rxnn+rn+γ((+xnr–rn)
n) . From
Tx=
{}, x∈[–, ]; [–|x|x|+| , ], x∈[–, –),
andαn=nn+,rn=nn+, andγ=, we have
xn+=
n n+
xn+ –
n n+
Table 2 Numerical results of Example 1.1 being randomized in the second time
n zn xn |xn+1– xn|
1 –1.26779E–00 –3.00000E+00 1.91548E+00 2 0 –1.08452E+00 6.50711E–01 3 0 –4.33808E–01 2.47890E–01 4 0 –1.85918E–01 1.03288E–01 5 0 –8.26300E–02 4.50709E–02 6 0 –3.75591E–02 2.02241E–02 7 0 –1.73350E–02 9.24532E–03 8 0 –8.08965E–03 4.28276E–03 9 0 –3.80690E–03 2.00363E–03 10 0 –1.80327E–03 9.44568E–04 .
. .
. . .
. . .
. . .
50 0 –7.26163E–16 3.66677E–16
where
zn∈
{}, un∈[–, ];
[– |un|
|un|+, ], un∈[–, –).
Step. Compute the numerical results. Choosingx= – and taking randomlyznin the
above interval, we obtain Tables and .
From Table and Table , we see that is the solution in Example ..
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Author details
1Department of Mathematics, Faculty of Science, Chiang Mai University, Chiang Mai, 50200, Thailand.2School of Science,
University of Phayao, Phayao, 56000, Thailand. 3Department of Mathematics Education and the RINS, Gyeongsang
National University, Jinju, 660-701, Republic of Korea.4Department of Mathematics, King Abdulaziz University, Jeddah,
21589, Saudi Arabia.
Acknowledgements
The first author would like to thank the Thailand Research Fund under the project RTA5780007 and Chiang Mai University. The third author thanks the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science, ICT and future Planning (Grant Number: 2014R1A2A2A01002100). W Cholamjiak and P Cholamjiak would like to thank University of Phayao.
Received: 13 August 2015 Accepted: 27 February 2016
References
1. Blum, E, Oettli, W: From optimization and variational inequalities to equilibrium problems. Math. Stud.63, 123-145 (1994)
2. Ceng, LC, Yao, JC: A hybrid iterative scheme for mixed equilibrium problems and fixed point problems. J. Comput. Appl. Math.214, 186-201 (2008)
3. Combettes, PL, Hirstoaga, SA: Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal.6, 117-136 (2005) 4. Peng, JW, Liou, YC, Yao, JC: An iterative algorithm combining viscosity method with parallel method for a generalized
equilibrium problem and strict pseudocontractions. Fixed Point Theory Appl.2009, Article ID 794178 (2009) 5. Tada, A, Takahashi, W: Strong convergence theorem for an equilibrium problem and a nonexpansive mapping. In:
Takahashi, W, Tanaka, T (eds.) Nonlinear Analysis and Convex Analysis. Yokohama Publishers, Yokohama (2005) 6. Kazmi, KR, Rizvi, SH: Iterative approximation of a common solution of a split equilibrium problem, a variational
inequality problem and a fixed point problem. J. Egypt. Math. Soc.21, 44-51 (2013)
7. Assad, NA, Kirk, WA: Fixed point theorems for set-valued mappings of contractive type. Pac. J. Math.43, 553-562 (1972)
8. Nadler, SB Jr.: Multi-valued contraction mappings. Pac. J. Math.30, 475-488 (1969)
10. Shahzad, N, Zegeye, H: Strong convergence results for nonself multimaps in Banach spaces. Proc. Am. Math. Soc.136, 539-548 (2008)
11. Shahzad, N, Zegeye, H: On Mann and Ishikawa iteration schemes for multi-valued maps in Banach spaces. Nonlinear Anal.71, 838-844 (2009)
12. Song, Y, Wang, H: Convergence of iterative algorithms for multivalued mappings in Banach spaces. Nonlinear Anal. 70, 1547-1556 (2009)
13. Hussain, N, Khan, AR: Applications of the best approximation operator to *-nonexpansive maps in Hilbert spaces. Numer. Funct. Anal. Optim.24, 327-338 (2003)
14. Jung, JS: Convergence of approximating fixed pints for multivalued nonself-mappings in Banach spaces. Korean J. Math.16, 215-231 (2008)
15. Zegeye, H, Shahzad, N: Viscosity approximation methods for nonexpansive multimaps in Banach space. Acta Math. Sin.26, 1165-1176 (2010)
16. Song, Y, Cho, YJ: Some note on Ishikawa iteration for multi-valued mappings. Bull. Korean Math. Soc.48, 575-584 (2011)
17. Kohsaka, F, Takahashi, W: Fixed point theorems for a class of nonlinear mappings relate to maximal monotone operators in Banach spaces. Arch. Math.91, 166-177 (2008)
18. Iemoto, S, Takahashi, W: Approximating common fixed points of nonexpansive mappings and nonspreading mappings in a Hilbert space. Nonlinear Anal.71, 2082-2089 (2009)
19. Liu, HB: Convergence theorems for a finite family of nonspreading and nonexpansive multivalued mappings and nonexpansive multivalued mappings and equilibrium problems with application. Theor. Math. Appl.3, 49-61 (2013) 20. Kohsaka, F, Takahashi, W: Existence and approximation of fixed points of firmly nonexpansive-type mappings in
Banach spaces. SIAM J. Optim.19, 824-835 (2008)
21. Mann, WR: Mean value methods in iteration. Proc. Am. Math. Soc.4, 506-510 (1953)