Scholarship@Western
Scholarship@Western
Electronic Thesis and Dissertation Repository
7-30-2019 10:00 AM
Development of a 1-Dimensional Data Assimilation to Determine
Development of a 1-Dimensional Data Assimilation to Determine
Temperature and Relative Humidity Combining Raman Lidar
Temperature and Relative Humidity Combining Raman Lidar
Backscatter Measurements And a Reanalysis Model
Backscatter Measurements And a Reanalysis Model
Shayamila N. Mahagammulla Gamage
The University of Western Ontario
Supervisor Robert Sica
The University of Western Ontario Co-Supervisor Alexander Haefele
The University of Western Ontario Graduate Program in Physics
A thesis submitted in partial fulfillment of the requirements for the degree in Doctor of Philosophy
© Shayamila N. Mahagammulla Gamage 2019
Follow this and additional works at: https://ir.lib.uwo.ca/etd
Part of the Atmospheric Sciences Commons, Meteorology Commons, Statistical Methodology Commons, and the Statistical, Nonlinear, and Soft Matter Physics Commons
Recommended Citation Recommended Citation
Mahagammulla Gamage, Shayamila N., "Development of a 1-Dimensional Data Assimilation to Determine Temperature and Relative Humidity Combining Raman Lidar Backscatter Measurements And a Reanalysis Model" (2019). Electronic Thesis and Dissertation Repository. 6356.
https://ir.lib.uwo.ca/etd/6356
This Dissertation/Thesis is brought to you for free and open access by Scholarship@Western. It has been accepted for inclusion in Electronic Thesis and Dissertation Repository by an authorized administrator of
Abstract
Water vapor is the most dominant greenhouse gas in Earth’s atmosphere. It is highly variable
and its variations strongly depend on changes in temperature. Atmospheric water vapor can
be expressed as relative humidity (RH), the ratio of the partial pressure of water vapor in
the mixture to the equilibrium vapor pressure of water over a flat surface of pure water at a
given temperature. Liquid water can exist as super-cooled water for temperatures between
0◦C to−38◦C. Thus, RH can be measured either relative to water (RHw) or to ice (RHi). RH
i
measurements are important in the upper tropospheric region, where the temperature is always
less than 0◦C, to study ice supersaturation (ISS) and its relation to the formation of cirrus
clouds.
I present three studies all using a mathematical scheme called the optimal estimation method
(OEM). The OEM is an inverse method that determines the most probable state consistent with
the measurements and a priori knowledge. These studies use parts of a large set of existing
measurements from the Raman Lidar for Meteorological Observations (RALMO) instrument
located at the meteorological observatory in Payerne, Switzerland.
I first develop an OEM retrieval for temperature using RALMO’s two pure rotational
Ra-man (PRR) channel measurements. Retrieved temperatures show excellent agreement with
coincident balloon-borne radiosonde measurements. A second OEM scheme is introduced to
retrieveRHw directly from RALMO measurements of back-scatter due to water vapor and
ni-trogen. I validate the OEM retrievals developed for temperature and RHw. I then combine
the OEM-retrieved temperature and RHw with data from the European Centre for
Medium-Range Weather Forecasts Re-analysis (ERA5) to compute a new and improved temperature
and relative humidity product. The retrieval is enhanced by assimilating it with the ERA5 data.
The quality of the RHw retrievals from the assimilated OEM scheme greatly improves over
retrievals which use less accurate a priori information.
Thirdly, I retrieve RHi to detect ISS layers. I find the frequency of ISS layers in the free
troposphere over Payerne to be about 27% using 82.5 hours of measurements.
Keywords: 1D Var Data Assimilation, Reanalysis, Optimal Estimation Method, ERA5,
Raman lidar, Rotational Raman temperature, UTLS, Water vapor mixing ratio, Relative
hu-midity, Ice supersaturation, Particle extinction
Water vapor is the most dominant greenhouse gas in Earths atmosphere that is highly
vari-able. Variations of the atmospheric water vapor strongly depend on changes in temperature.
Accurate estimates of humidity and temperature and as well as the uncertainties associated
are required for both weather and climate forecasting purposes. I present a new mathematical
and statistical approach to estimate both atmospheric humidity and temperature using Raman
lidar backscatter measurements. The new method provides full uncertainty budgets for each
estimated temperature and relative humidity profile, that represent the errors due to
instrumen-tation, estimation method and so on. I have also combined the Raman lidar measurements into
the data from the ERA5 that is the latest major global reanalysis produced by European
Cen-tre for Medium- Range Weather Forecasts (ECMWF), to enhance the quality of the humidity
and temperature estimates. My results show that the quality of the temperature and
humid-ity retrievals are greatly improved and agree best with the measurements made by coincident
radiosondes.
Co-Authorship Statement
The entire thesis is written under the supervision of Dr. Robert Sica and Dr. Alexander Haefele.
Main research ideas are generated by Dr. Sica and Dr. Hafele.
I was provided with raw Raman lidar measurements from Raman Lidar for Meteorological
Observations (RALMO) and radiosonde measurements from MeteoSwiss located in Payerne,
Switzerland. Both lidar and sonde measurements have been used in the work presented in
Chapters 2,3, and 4.
The work presented in Chapter 2 was done in collaboration with Dr. Gianni Martucci. The
traditional Raman lidar temperature analysis was performed and provided to me by Dr. Gianni
Martucci. I was provided with the RALMO data processing codes and the OEM codes written
by Dr. Sica and Dr. Haefele in their water vapor and Rayleigh temperature studies. All the
necessary MATLAB codes related to the OEM Raman temperature algorithm were written by
me. I also conducted the OEM analysis for temperature retrievals and compared the results
with the radiosonde and traditional Raman lidar temperatures.
The work done in Chapters 3 and 4 is based on the studies of OEM Raman temperature
study by me and the OEM water vapor mixing ratio by Dr. Sica and Dr. Haefele. In the work
presented in both Chapters 3 and 4, I have used the ERA5 hourly reanalysis data obtained from
the ECMWF data archive. I was responsible for providing the MATLAB codes for the OEM
relative humidity retrievals, and I performed the OEM analysis.
This work would not be possible without the guidance of my two supervisors Dr. Robert Sica
and Dr. Alexander Haefele. I would thank both for supporting me with my work and providing
me with opportunities to present my work in conferences and various other platforms. I would
like to thank MeteoSwiss in Payerne (the federal Office of Meteorology and Climatology) in Switzerland for allowing me to use the data from their Raman lidar system. Understanding of
the RALMO system and the detection of rotational Raman spectrum was possible thanks to Dr.
Valentine Simeonov of Ecole Polytechnique Federale de Lausanne. I would like to thank Dr.
Gianni Martucci for his invaluable instruction and inputs for my work. Also, I would like to
thank everyone working at MeteoSwiss for their great support and motivation.
This work is not only supported by a MeteoSwiss and Western University but also by
Na-tional Science and Engineering Research Council of Canada and the Canadian Space Agency
under the Arctic Validation and Training for Atmospheric Research in Science (AVATARS)
program.
I also thank the Western writing support center and Patricia Sica for their assistance in
editing and proofreading all my papers and my thesis. I am thankful to my colleague Ghazal
Farhani for being there for me for everything. I would also like to thank Dr. Emily McCullough,
the first person whom showed me how the lidars work and how to make things work. Also, I
am thankful for all the great inputs and support given by my purple crow lidar group members
throughout the years of my PhD.
I am appreciative toward Dr. Blaine A. Chronik and Dr. Aaron Sigut who were on my
academic committee and providing me with great advice and motivation to complete my thesis.
I also thank Dr. Kanthi Kaluarachchi for being a motherly figure to me and guiding me in
many ways to succeed. I thank all the staff at Physics department who were always helpful and supportive. I have no words to thank Rajitha, my roommate for tolerating me for all these
years and I am surely indebted for her support.
Finally, I would like to thank my parents and my sisters. I am thankful for their
uncon-ditional love and support. Everything I achieve in my life including the PhD I would like to
dedicate to my wonderful family.
Contents
Abstract ii
Summary for Lay Audience iii
Co-Authorship Statement iv
Acknowledgements v
List of Figures x
List of Tables xv
1 Introduction 1
1.1 Overview . . . 1
1.2 Introduction to Earth’s atmosphere . . . 6
1.2.1 Temperature structure . . . 8
Troposphere . . . 8
Stratosphere . . . 10
Upper troposphere - lower stratosphere (UTLS) . . . 10
1.2.2 Atmospheric humidity . . . 12
Mixing ratio . . . 12
Specific humidity . . . 13
Vapor pressure . . . 13
Saturated vapor pressure . . . 13
Relative humidity . . . 15
Ice supersaturation (ISS) . . . 15
1.3 Lidars and atmospheric measurements . . . 18
General description of a lidar . . . 18
Atmospheric scattering related to lidar . . . 20
Elastic scattering and Raman lidar equations . . . 24
1.4 Raman lidar for Meteorological Observations (RALMO) . . . 29
1.4.1 Pure rotational Raman (PRR) lidar . . . 31
1.4.2 Vibrational Raman/water vapor system . . . 31
1.5 Traditional Raman lidar algorithms . . . 32
1.5.1 Temperature measurements . . . 32
1.5.2 Water vapor mixing ratio . . . 33
1.5.3 Relative humidity . . . 35
1.6 Optimal estimation method (OEM) . . . 37
1.6.1 Advantages of implementing the OEM for lidar temperature and rela-tive humidity retrievals. . . 40
List of Appendices 1 2 Application of the OEM for temperature retrievals 49 2.1 Overview . . . 49
2.2 The Raman Lidar for Meteorological Observations . . . 51
2.3 The PRR lidar equation . . . 52
2.4 Application of the OEM for PRR temperature retrieval . . . 53
2.4.1 Brief review of the optimal estimation method . . . 53
2.4.2 The forward model for a PRR lidar . . . 54
2.4.3 Implementation of the RR temperature retrieval . . . 58
2.5 Results from the temperature retrieval . . . 61
2.5.1 Case 1: Nighttime with clear conditions . . . 61
2.5.2 Case 2: Daytime with clear conditions . . . 68
2.5.3 Case 3: Nighttime with cirrus cloud . . . 70
2.5.4 Case 4: Nighttime with lower level cloud . . . 74
2.6 Discussion . . . 76
2.6.1 Conclusion . . . 80
3 Assimilated Raman lidar and ERA5 relative humidity retrievals 85 3.1 Overview . . . 85
3.2 Data used in 1DVar reanalysis . . . 87
3.2.1 RAman lidar for Meteorological Observations (RALMO) . . . 87
3.2.2 ERA5 reanalysis data . . . 87
3.3 1D Var retrieval of relative humidity from ERA5-reRH . . . 89
3.3.1 Forward model . . . 89
3.3.2 Error covariance matrices . . . 93
Measurement noise . . . 93
A priori(background) relative humidity and temperature . . . 93
Particle extinction and overlap . . . 96
Background, lidar constants, and dead times . . . 96
Forward model parameters . . . 97
3.3.3 Other 1D Var retrieval specifications . . . 98
3.3.4 Characterization of ERA5-reRH . . . 98
Case 1: Nighttime, cloudy sky, 28 August 2012 2241-2311 UT . . . 98
Case 2: Daytime, clear sky, 10 September 2011 1010 - 1040 UT . . . . 100
3.4 1D Var retrieval of relative humidity from Raman lidar and U.S. standard at-mospheric model . . . 103
3.5 Results . . . 103
3.5.1 Validation of the reanalysis against radiosonde measurements . . . 103
Nighttime . . . 104
Daytime . . . 107
3.6 Discussion . . . 110
3.7 Conclusion . . . 113
4 Detecting ice supersaturation layers over Payerne 118 4.1 Overview . . . 118
4.4 Discussion and conclusions . . . 128
5 Conclusions and future work 133 5.1 Summary . . . 133
5.2 Conclusion . . . 136
5.3 Future work . . . 139
A Jacobians of the three types of PRR temperature forward models 140 B Conventional method of Raman lidar relative humidity 141 C 1D Var retrieval of relative humidity from Raman lidar 145 C.1 Case 1: Nighttime, clear sky, 09 September 2011 2200 - 2215 UT . . . 146
C.2 Case 2: Daytime, clear sky, 10 September 2011 1000 - 1015 UT . . . 148
C.3 Temperature, relative humidity and particle extinction time series . . . 154
C.4 Summary . . . 157
D Estimated bias and the covariance for relative humidity 158
Curriculum Vitae 160
List of Figures
1.1 An atmospheric temperature profile based on the US Standard Atmosphere
val-ues showing the regions of the atmosphere based on temperature structure. . . . 9
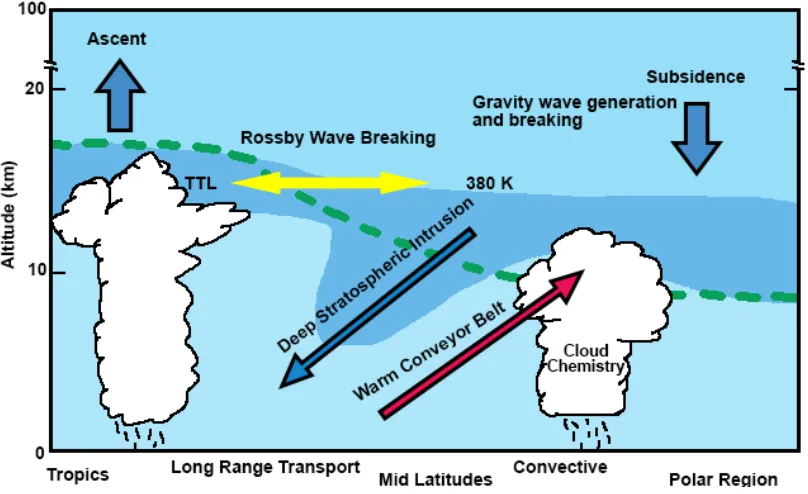
1.2 The important processes in the UTLS region . . . 11
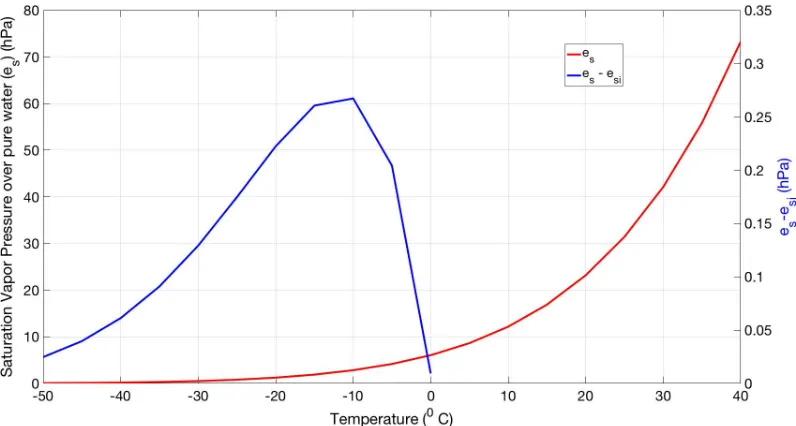
1.3 Variation with temperature of the saturation vapor pressure over a plane surface
of pure water and the difference between the saturation vapor pressure over a plane surface of water to ice . . . 14
1.4 Schematic drawing of lidar system. . . 19
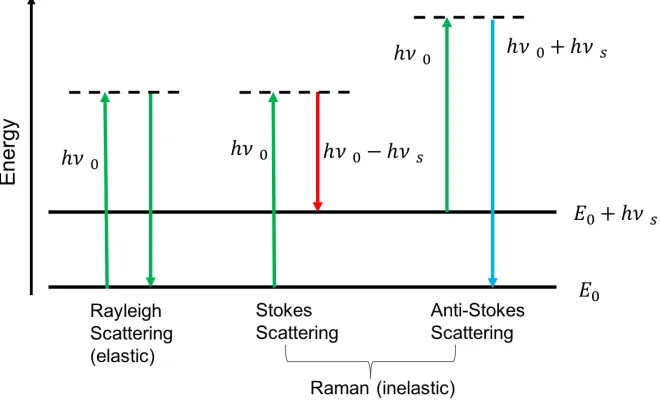
1.5 The different types of light scattering . . . 22
1.6 Raman backscatter spectrum of the atmosphere for an incident laser wavelength
of 355 nm . . . 23
1.7 Optical diagram of the transceiver of RALMO (PB - Pellin Broka prism).
Adapted from Dinoev et al. (2010). . . 30
1.8 Schematic of the OEM retrieval algorithm . . . 38
2.1 Count rate for 30 min of coadded RALMO measurements from 2300 UT on 09
September 2011, a clear night . . . 62
2.2 Difference between the forward model and clear nighttime RALMO measure-ments on 09 September 2011 . . . 63
2.3 Averaging kernels and vertical resolution for temperature retrievals from the
clear nighttime RALMO measurements on 09 September 2011 . . . 64
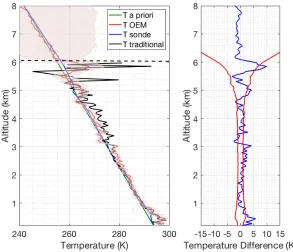
2.4 Retrieved temperature profile and the statistical uncertainty using the OEM
from the clear nighttime RALMO measurements on 09 September 2011 in
comparison with the coincident sonde measurements . . . 65
measurements on 09 September 2011 . . . 66
2.6 Retrieved geometrical overlap function from the clear nighttime RALMO
mea-surements on 09 September 2011 . . . 67
2.7 Count rate for 30 min of clear coadded RALMO measurements from 1100 UT
on 10 September 2011 . . . 68
2.8 Difference between the forward model and the clear daytime RALMO mea-surements on 10 September 201 . . . 69
2.9 Averaging kernels and vertical resolution for temperature retrievals from the
clear daytime RALMO measurements on 10 September 2011 . . . 69
2.10 Retrieved temperature profile and the statistical uncertainty using the OEM
from the clear daytime RALMO measurements on 10 September 2011 in
com-parison with the coincident sonde measurements . . . 70
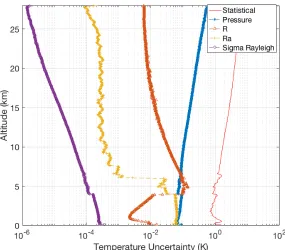
2.11 Random uncertainties and systematic uncertainties due to the forward model
parameters for the temperature retrievals from the clear daytime RALMO
mea-surements on 10 September 2011 . . . 71
2.12 Count rate for 30 min of coadded RALMO measurements from 2300 UT on 05
July 2011 with the presence of a cirrus cloud . . . 72
2.13 Difference between the forward model and the nighttime RALMO measure-ments on 05 July 2011 with the presence of a cirrus cloud . . . 72
2.14 Averaging kernels and vertical resolution for temperature retrievals from
mea-surements on 05 July 2011 with a cirrus cloud at 6 km height . . . 73
2.15 Retrieved temperature profile and the statistical uncertainty using the OEM
from the RALMO measurements on 05 July 2011 with a cirrus cloud at 6 km
height, in comparison with the coincident sonde measurements . . . 73
2.16 The OEM retrieved particle extinction, calculated Backscatter coefficient, and estimated lidar ratio profiles from the RALMO measurements on 05 July 2011
with of a cirrus cloud present at 6 km height . . . 74
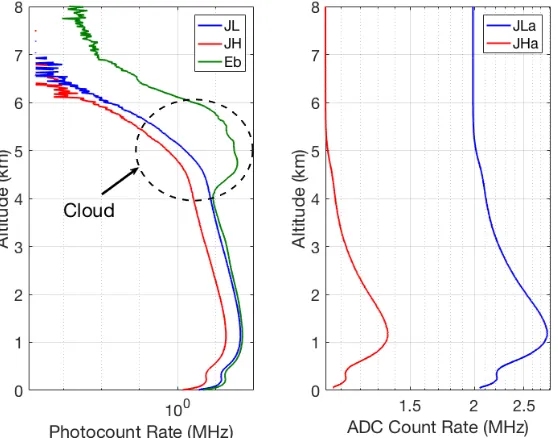
2.17 Count rate for 30 min of coadded RALMO measurements from 2300 UT on 21
June 2011, which has a cloud base at an height about 4 km . . . 75
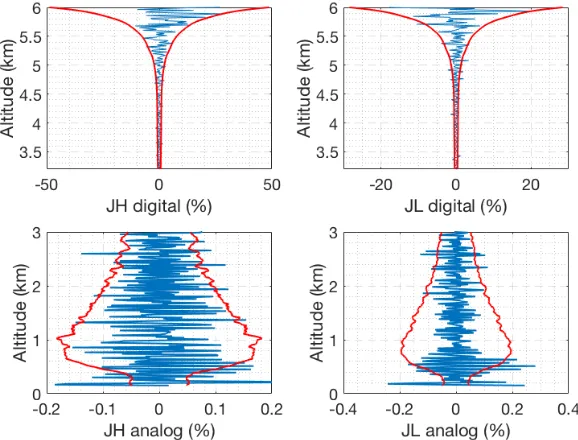
2.18 Difference between the forward model and the nighttime RALMO measure-ments on 21 June 2011 with the presence of a lower level cloud . . . 76
2.19 Averaging kernels and vertical resolution for temperature retrievals from
mea-surements on 21 June 2011 with the presence of lower level cloud . . . 77
2.20 Retrieved temperature profile and the statistical uncertainty using the OEM
from the RALMO measurements on 21 June 2011 with the presence of a lower
level cloud, in comparison with the coincident sonde measurements . . . 77
2.21 The OEM retrieved particle extinction, calculated Backscatter coefficient, and estimated lidar ratio profiles from the RALMO measurements on 21 June 2011
with the presence of a lower level cloud . . . 78
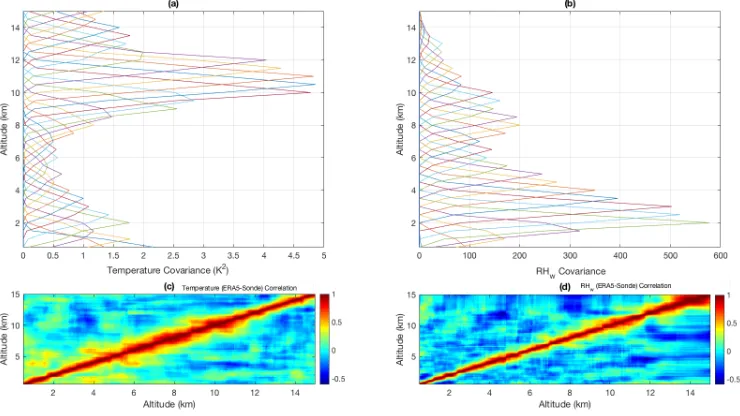
3.1 Dates and times of the sondes were launched from Payerne, Switzerland that
coincide with the ERA5 reanalysis data used to estimate the correlations of the
temperature and relative humidity . . . 94
3.2 Temperature and relative humidity biases of the ERA5 reanalysis data . . . 95
3.3 Covariance and correlation matrices for temperature and relative humidity . . . 95
3.4 The OEM-retrieved temperature and relative humidity profiles, averaging
ker-nels and uncertainty budgets from RALMO measurements on 28 August 2012
with 30 min temporal and 90 m vertical resolutions . . . 99
3.5 The OEM-retrieved temperature and relative humidity profiles, averaging
ker-nels and uncertainty budgets from RALMO measurements on 10 September
2011 with 30 min temporal and 90 m vertical resolutions . . . 102
3.6 Nighttime temperature and relative humidity differences between bias corrected ERA5, RALMO, and ERA5-reRH, with sonde measurements for 14 nights . . . 104
3.7 Nighttime temperature biases of ERA5-Sonde,RALMO-Sonde, and ERA5-reRH
-Sonde . . . 105
3.8 Daytime temperature and relative humidity differences between bias corrected ERA5, RALMO, and ERA5-reRH, with sonde measurements for 6 days . . . . 108
4.1 Thickness of the 44 individual ISS layers detected over Payerne, Switzerland
with 90 m vertical resolution. . . 122
4.2 The frequency of ISS layers that occur at temperatures below freezing point . . 124
4.3 Number of ISS layers occur at every 10 degree temperature ranges below
freez-ing temperature. . . 124
4.4 ISS layers presented at different height layers in the atmosphere . . . 125
4.5 Number of ISS layers presence at clear and cloudy sky conditions . . . 126
4.6 Elastic backscatter signal, temperature, and relative humidity retrievals from
the RALMO measurements made on 01 September 2011 from 1900-2200 UT . 127
A.1 Jacobians of the three different forward models . . . 140
C.1 Count rate for 15 min of RALMO measurements from 2200 UT on 09
Septem-ber 2011, a clear night . . . 146
C.2 Residuals between the forward model and clear nighttime RALMO
measure-ments on 09 September 2011 . . . 147
C.3 Averaging kernels for temperature and relative humidity retrievals from the
clear nighttime RALMO measurements on 09 September 2011 . . . 147
C.4 Vertical resolutions for temperature and relative humidity retrievals from the
clear nighttime RALMO measurements on 09 September 2011 . . . 148
C.5 The OEM retrieved temperature and relative humidity in comparison with
co-incident sonde measurements and a priori profiles from the clear nighttime
RALMO measurements on 09 September 2011 . . . 149
C.6 Full uncertainty budgets for temperature and relative humidity retrievals from
the clear nighttime RALMO measurements on 09 September 2011 . . . 150
C.7 Count rate for 15 min of RALMO measurements from 1000 UT on 10
Septem-ber 2011, a cloudy daytime . . . 151
C.8 Averaging kernels for temperature and relative humidity retrievals from the
cloudy daytime RALMO measurements on 10 September 2011 . . . 152
C.9 The OEM retrieved temperature and relative humidity in comparison with
co-incident sonde measurements and a priori profiles from the cloudy daytime
RALMO measurements on 10 September 2011 . . . 153
C.10 The OEM retrieved temperature profiles from RALMO measurements on 02
August 2011, from 1000-2359 UT with 15 min temporal and 90 m vertical
res-olutions. . . 154
C.11 The OEM retrieved particle extinction, RALMO back-scatter coefficient profile and estimated lidar ratio profile for 02 August 2011 . . . 155
D.1 Bias in the ERA5 relative humidity over ice measurements to the observational
measurements from sonde . . . 158
D.2 Correlation and covariance of the bias corrected ERA5 relative humidity over ice159
D.3 ERA5-reIce retrieved RHi from the RALMO measurements made from
June-November, 2011 . . . 159
1.1 Composition of Earth’s atmosphere . . . 6
1.2 Detected quantum lines from nitrogen and oxygen in PRR spectrum. . . 31
2.1 Return PRR wavelengths detected by the RALMO and the respective quantum
lines from nitrogen and oxygen PRR spectrums. . . 56
2.2 Values and associated uncertainties for the OEM retrieval and forward model
parameters. . . 57
2.3 Details of the 4 cases in different sky conditions we present to demonstrate the flexibility of our OEM temperature retrieval. . . 61
3.1 Values and associated uncertainties for the retrieval and forward model
param-eters. . . 97
4.1 Dates and hours of measurements used in the ISS study . . . 121
Chapter 1
Introduction
1.1
Overview
Earth’s climate is changing with time and in recent years, interest in better understanding the
factors affecting the climate has increased. Only over the last two centuries has measuring the Earth atmospheric parameters such as temperature and humidity, and monitoring the changes
of those parameters have become a scientific interest. Since the late 18thcentury, temperature
measurements made by thermometers and other surface instruments have been available (Riehl
et al., 1972). Balloon-borne sounding (radiosonde) measurements in the free atmosphere
be-gan after the Second World War (Riehl et al., 1972). Since the 1960s satellites have also been
employed to measure and monitor the Earth’s atmospheric parameters and the climate (Thies
and Bendix, 2011). In the recent past, most atmospheric measurements were used
primar-ily for weather forecasting purposes. Accuracy of the measurements plays a key role in both
climate and weather predictions (Chahine, 1992; Palmer, 2000). Hence, improving
measur-ing instrumentation and data analysis techniques has become a major interest in the scientific
community.
Atmospheric water vapor is a fundamental parameter in the Earth’s climate system and it is
also with atmospheric temperature. Water vapor is known as the most significant greenhouse
gas and plays a key role in thermodynamic and radiative processes in the atmosphere as well as
in many other atmospheric processes (Wallace and Hobbs, 2006; Marshall and Plumb, 1989).
The amount of water vapor is high in the atmospheric regions where the temperature is high.
High concentrations of water vapor in the atmosphere increase the absorption of long wave
radiation, inducing warmer climate. The positive feedback of water vapor is by far the strongest
feedback acting in the atmosphere (Held and Soden, 2000). Understanding the distribution and
variability of the water vapor in the atmosphere along with the temperature variations allows
for better understanding of the Earth’s weather and climate systems.
The global radiosonde network provides most of the temperature and relative humidity
in-formation required for the forecast models. Even though there are thousands of stations where
radiosondes are launched, the temporal resolution of the routine sonde measurements is rather
low, with typically two radiosondes per day (Durre et al., 2006). Typically, radiosondes can
take measurements up to about 30 km (a pressure altitude of about 11 hPa). However, it is
also well known that the radiosonde relative humidity measurements are often not reliable in
the upper troposphere (Leiterer et al., 1997; Nagel et al., 2001; Miloshevich et al., 2001; Noh
et al., 2016; Ferreira et al., 2019). Among several other techniques available for improved
water vapor measurements and temperature measurements, such as satellites and microwave
radiometers, Raman lidar has become one of the potential tools that can provide water vapor
and temperature measurements throughout the troposphere with high vertical and temporal
resolutions (Whiteman et al., 1992; V´er`emes et al., 2016; Zuev et al., 2017). The Raman lidar
technique uses the weak inelastic scattering of light by atmospheric water vapor, nitrogen and
oxygen molecules. A typical Raman lidar system either measures temperature or water vapor as
a function of height. Water vapor measurements from Raman lidars use the frequency-shifted
backscattered radiation due to the excitation of the vibrational energy of the nitrogen and
wa-ter vapor molecules to measure a mixing ratio (ratio of the number of wawa-ter vapor molecules
relative to the dry air molecules). However, for Raman lidar temperature measurements, the
frequency shifted backscattered radiation, due to the rotational energies of the nitrogen and
oxygen is considered. Among the three lidar techniques for temperature profiling (Rotational
Raman, Rayleigh, and resonance fluorescence), Rotational Raman (RR) lidar has become the
most efficient remote sensing technique for temperature profiling from the ground to the upper stratosphere. At lower altitudes, Mie scattering on aerosols prevents the use of the Rayleigh
lidar method for temperature measurements (Alpers et al., 2004). Therefore, the RR spectra of
Par-1.1. Overview 3
ticle extinction measurements are also possible with both vibrational-rotational and rotational
Raman-scattered lidar signals. One can combine Raman lidar water vapor mixing ratio and
temperature measurements to obtain a vertical profile of relative humidity. Measuring water
vapor content in terms of relative humidity, where relative humidity is defined as the relation
between the amount of water vapor present and the maximum amount that is physically
possi-ble at a given temperature, is important as it not only provides a measure of humidity but also a
measure of temperature. Also, for temperatures below 0◦C, relative humidity can be measured
relative to water or ice. The necessity of measuring relative humidity over ice is crucial for
atmospheric temperatures below -38◦C as often liquid water does not exist beyond that
tem-perature (except as super-cooled water). However, making direct measurements of water vapor
pressure relative to ice are challenging. Using a variety of mathematical extrapolations such as
GoffGratch equation (List, 1984), Hyland and Wexler (Hyland, 1983), Magnus Teten (Mur-ray, 1966), one can convert saturated vapor pressure measurements made with respect to water
into saturated vapor pressure relative to ice. Hence, an estimation of relative humidity over ice
(RHi) is possible in the atmospheric regions where the temperatures reach beyond -38◦C. The
RHi measurements are important in the upper tropospheric region to study ice supersaturation
(ISS) and formation of the cirrus clouds.
Generally, atmospheric humidity measurements are scientifically challenging to obtain due
to their high variability. Thus, detecting ISS is difficult with lack ofRHi measurements. Vari-ous aircraft-based studies have shown the existence of frequent ISS in the UT (Kr¨amer et al.,
2009; Jensen et al., 2001; Gierens et al., 2000). An aircraft-based study by Jensen et al. (2005)
has made extreme supersaturation measurements whereRHi reached up to 230% in clear sky
conditions. Another study by Popp et al. (2007) using aircraft-based measurements showed
high ISS of 230-250% in cloudy conditions. Due to the limited number of observations and
their constrained temporal and spatial resolutions, it is difficult to understand the accuracy of
RHi measurements including the extreme observations made by aircraft. The main question
that arises about the extreme observations is whether they are due to instrument artifacts or
lack of knowledge of the physics of the ISS (Peter et al., 2006). In comparison to radiosonde
and aircraft-based RHi measurements, geostationary satellites provide a better set of global
poor compared to the other instruments. Even though traditional Raman lidar techniques do
not measure directRHi, one can use the Raman lidar water vapor mixing ratio measurements
together with ancillary temperature measurements to calculateRHi. In addition to high
tempo-ral and spatial resolutions of the Raman lidar measurements, the measurements are made from
a single ground-based location. Hence, using Raman lidar water vapor measurements has
ad-vantages for studying the climate impact of water vapor, supersaturation, and cloud formation.
The first known study of atmospheric ISS using Raman lidar measurements was made by
Comstock et al. (2004). A year’s worth of nighttime Raman lidar water vapor mixing ratio
measurements calibrated against microwave radiometer water vapor measurements was used
with radiosonde temperature measurements to estimate RHi. That study focused on the
fre-quency of high ISS in cirrus clouds. The results indicated thatRHi > 120% frequently occurs
at temperatures above -70◦C. The study by Comstock et al. (2004) does not provide for the
uncertainty of the calculatedRHi measurements. A study by Immler et al. (2008) also used a
combination of Raman lidar water vapor measurements with radiosonde temperature
measure-ments to investigate cirrus, contrails, and ice supersaturated regions in high pressure systems at
northern mid-latitudes. Raman lidar measurements made from August to September in 2000, in
clear sky conditions (without low and mid-level clouds) were used to estimateRHi. The results
showed that the occurrence of cirrus and ISS are closely related. They observed frequent ice
supersaturated regions in the uppermost troposphere (8 km to tropopause). Further
investiga-tions of optical depths, cirrus cloud classification, and contrails were also presented by Immler
et al. (2008). Even though studies of ISS made using Raman lidar measurements are available,
no study can be found that provides a direct retrieval ofRHi with retrieval uncertainties.
For the first time I present the application of the Optimal Estimation Method (OEM) mainly
to retrieve temperature and relative humidity over water, and, as well, as over ice from the
Raman lidar measurements. The OEM is an inverse method that has shown the potential to
retrieve atmospheric aerosol, water vapor mixing ratio, ozone, and atmospheric temperature
using lidar measurements (Povey et al., 2014; Sica and Haefele, 2016, 2015; Farhani et al.,
2018; Mahagammulla Gamage et al., 2019). The OEM requires minimization of a cost
func-tion that measures the degree of fit of estimates of the atmospheric state to the measurements
1.1. Overview 5
has several advantages over the traditional Raman lidar algorithms used to calculate
temper-ature and water vapor mixing ratios. One of the important advantages of the OEM is that it
can retrieve multiple other parameters such as overlap, particle extinction, lidar constant etc
directly from the raw lidar measurements. The OEM also provides a full uncertainty budget
including both random and systematic uncertainties on a profile-by-profile basis. The OEM
provides estimates of retrievals of the atmospheric parameters such as temperature, humidity,
and particle extinction with an estimate of a full uncertainty budget. Using the OEM-retrieved
measurements and their uncertainty estimates in the weather and climate forecasts will provide
better predictions with a well-defined uncertainty. The OEM-retrieved overlap functions, dead
times, and lidar constants allow better understanding of the instrument used.
I applied an OEM analysis in three projects, all involving existing Raman lidar
measure-ments from the Raman lidar measuremeasure-ments from the Meteoswiss/EPFL RAman lidar for Me-teorological Observations (RALMO), located in Payerne, Switzerland. The OEM-retrieved
temperature from the RALMO measurements in different sky conditions such as clear day-time, clear nightday-time, low level clouds/aerosol, and cirrus cloud showed good agreement with the coincident sonde measurements and as well as better results than the traditional Raman
temperature measurements especially in cloudy conditions. The relative humidity retrievals
using the OEM use measurements from eight Raman channels in RALMO and allow direct
retrievals of relative humidity. I further studied the time series of relative humidity over water
and validated my results with coincident sonde measurements. The relative humidity over ice
retrievals from the RALMO measurements were later used to investigate the frequency of ice
super saturated event occurring above Payerne. Thus, I have successfully shown the OEM to
retrieve relative humidity over water or ice from the Raman lidar measurements without the
need of separate temperature and mixing ratio calculations.
Chapter 1 focuses on the Earth’s atmosphere and atmospheric parameter measuring
tech-niques. The first section of Chapter 1 gives a brief introduction to the Earth’s atmosphere,
temperature structure, and atmospheric humidity. Section 1.3 gives a brief introduction to
li-dars, atmospheric scattering and the lidar equation. Sections 1.4 and 1.5 introduce the RALMO
lidar system and the traditional Raman lidar algorithm used to calculate relative humidity and
over the traditional Raman lidar algorithms are given in Section 1.6.
The focus of Chapters 2 and 3 is to introduce and to describe the implementation of the
Optimal Estimation Method (OEM) with Raman backscatter measurements to retrieve of
perature, relative humidity over water. Chapter 2 gives the results of the OEM-retrieved
tem-peratures in four sets of conditions. Chapter 3 presents the assimilation of the set of Raman
lidar measurements into European Centre for Medium-Range Weather Forecast Reanalysis
(ERA5) data set. Chapter 4 of this thesis focuses on implementing the OEM scheme to retrieve
relative humidity over ice to determine the occurrence of supersaturation events over Payerne,
Switzerland. Chapter 5 summarizes and gives conclusions from all three projects and ideas for
future work.
1.2
Introduction to Earth’s atmosphere
Our Earth is enveloped by a relatively thin gaseous layer called the atmosphere, extending
several thousands of kilometers above Earth’s surface. Approximately 99% of the mass of the
atmosphere is concentrated in the first 30 km from the surface (Wallace and Hobbs, 2006). In
the early 1800s, John Dalton was able to recognize that the atmosphere is composed of several
chemically distinct gases such as nitrogen and oxygen. He also determined the relative amounts
of each gas found within the lower atmosphere. Later, in the 1920s, with the development of the
spectrometer scientists were able to discover the atmospheric gases such as ozone and carbon
dioxide that are very low in concentration. Table 1.1 shows the atmospheric gases and their
composition (Wallace and Hobbs, 2006).
Table 1.1: Composition of Earth’s atmosphere
Constituent Molecular weight Content (fraction of the total molecules)
Nitrogen (N2) 20.016 0.7808 (75.51% by mass)
Oxygen (O2) 32.00 0.2095 (23.14% by mass)
Argon (A) 39.94 0.0093 (1.28% by mass)
Water vapor (H2O) 18.02 0.5 (% by volume)
Carbon dioxide (CO2) 44.01 325 ppm
Neon (Ne) 20.18 18 ppm
Helium (He) 4.00 5 ppm
Krypton (Kr) 83.7 1 ppm
Hydrogen (H) 2.02 0.5 ppm
1.2. Introduction toEarth’s atmosphere 7
A significant amount of atmospheric oxygen is produced by the photosynthesis reactions.
Due to a variety of chemical reactions the oxygen in the atmosphere leads to the formation
of an ozone (O3) layer in the upper atmosphere. Ozone filters the incoming solar radiation
in the ultraviolet region (Wallace and Hobbs, 2006). The nitrogenous compounds from the
metabolism of living organisms are returned to the atmosphere as nitrogen. Even though
nitro-gen is the most important component for all living beings, as DNA, RNA, and other proteins
are made up of nitrogen, the atmospheric nitrogen is not in the usable form for most living
beings. Lightning converts the atmospheric nitrogen to the usable molecules for life such as
nitrate ions (NO−3), ammonia (NH3), and urea [(NH2)2CO] (Wallace and Hobbs, 2006). Two
of the minor constituents of the atmosphere, water vapor and carbon dioxide play a key role in
controlling the warming of the atmosphere. Atmospheric water vapor is the dominant
green-house gas. It is highly variable and typically takes up to 0.5% of the volume of the Earth’s
atmosphere (Marshall and Plumb, 1989). The main source of the atmospheric water vapor is
the evaporation from the ocean’s surface. As moist air rises through the atmosphere, the air
gets cooler and the water vapor in the air parcel condenses to form clouds. The water vapor
condenses into water droplets to form clouds when it has a particle to condense upon. Such
particles are called condensation nuclei and dust, pollen, sea salt, and black carbon are a few
examples. Clouds that contain moisture are transported around the globe due to air currents
and eventually the moisture returns to the ground as precipitation. Precipitation can occur in
different forms such as rain, snow and hail. Once the water reaches the ground, a portion of it may evaporate back into the atmosphere and rest of the water may penetrate through the
surface and become groundwater. Groundwater can either seep into the oceans, rivers, and
streams, or it can be released back into the atmosphere through transpiration. Also, water runs
over land into streams and lakes which eventually forms major rivers and carries all the water
into the ocean. Then, again the water will be evaporated from the oceans. This process is
called the hydrologic cycle of the Earth. The hydrologic cycle acts as an energy transfer and
storage medium for the Earth’s climate system. Both water vapor and carbon dioxide in the
atmosphere absorb and emit infrared wavelengths of the solar spectrum (Marshall and Plumb,
1989; Wallace and Hobbs, 2006). The carbon dioxide concentration in the atmosphere is
and the atmosphere (Marshall and Plumb, 1989; Wallace and Hobbs, 2006). Carbon dioxide is
the most important of Earths long-lived greenhouse gases. Compared to water vapor, carbon
dioxide absorbs less heat but it stays in the atmosphere much longer. Even though, carbon
dioxide is less abundant and less powerful than water vapor on a molecule per molecule basis,
it absorbs wavelengths of thermal energy that water vapor does not. Thus, carbon dioxide adds
to the greenhouse effect in a unique way and increases in atmospheric carbon dioxide are re-sponsible for about two-thirds of the total energy imbalance that is causing global temperature
to rise (Lindsey, 2018).
Today human activities are altering key dynamic balances in the atmosphere by increasing
greenhouse gas levels in the lower atmosphere. This leads to raise the Earth’s surface
tempera-ture by increasing the amount of heat radiated from the atmosphere back to the ground. Thus,
leads to changing the Earth’s climate. Two of the most important atmospheric parameters that
alter the Earth’s climate, temperature and humidity, are discussed in the following sections.
1.2.1
Temperature structure
Temperature is a key parameter of the state of the atmosphere that varies greatly both
ver-tically and horizontally. As the vertical structure of the temperature is qualitatively similar
everywhere, it is often used in characterizing and understanding the atmosphere. The vertical
temperature structure mostly depends on atmospheric pressure, humidity, and the effects of solar radiation. The atmosphere can be divided into 4 main layers based on its temperature,
as shown in Fig. 1.1. Starting from the surface the layers are troposphere, stratosphere,
meso-sphere, and thermosphere. For the purposes of this work I only consider the lowermost two
regions of the atmosphere.
Troposphere
The troposphere is the lowest part of the atmosphere that contains about 75% of all of the
atmospheric air molecules including all most all of the water vapor and dust particles in Earth’s
atmosphere (Riehl et al., 1972). Thus, most of the weather such as clouds, rain, snow, wind,
1.2. Introduction toEarth’s atmosphere 9
Figure 1.1: An atmospheric temperature profile based on the US Standard Atmosphere values showing the regions of the atmosphere based on temperature structure.
height. The troposphere is warmest near Earth’s surface as it heated from the below and coldest
at its top, where it meets up with the layer above (the stratosphere) at a boundary region called
the tropopause. The tropopause is lowest in the poles, where it is 7-10 km above the Earth’s
surface and it is highest ( 17-18 km) near the equator. The tropopause is also an inversion layer,
where the air temperature starts to decrease with height. The inversion layers hold warmer air
above cooler air, allowing only a little mixing between the troposphere and the stratosphere.
The solar radiation that streams through the atmosphere heats the Earth’s surface, and the
surface radiates the heat back into the atmosphere warming the air molecules near the surface.
cooler air tends to form clouds, rain, and snow. This continuous process of the rising of warm
air and sinking or condensation of cool air makes the troposphere a layer with well mixed air
(Riehl et al., 1972; Wallace and Hobbs, 2006; Marshall and Plumb, 1989).
The concept ”standard atmosphere” is used by atmospheric scientists to describe an
av-erage atmosphere with no variations caused by weather, latitude, season and so on. In the
standard atmosphere model, the bottom of the atmosphere is considered to be at sea level and
the temperature at the sea level is 15◦C. The temperature at the top of the troposphere is given
as−57◦C . The rate at which the temperature changes with the height is called the lapse rate
and in the troposphere the lapse rate is about 6.5 degrees per kilometer (Atmosphere, 1976).
Stratosphere
The stratosphere extends upwards from the tropopause to about 50 km. It contains most of the
ozone in the atmosphere. The temperature in the stratosphere increases with height due to the
absorption of the ultraviolet (UV) radiation by the ozone. This means the stratosphere has a
negative lapse rate. The temperature inversion in the stratosphere suppresses convection and
damps out the vertical motions of tropospheric air. Therefore, it is significantly less turbulent
than the troposphere. Hence, almost all commercial airliners cruise inside the stratosphere.
Stratospheric temperatures are also affected by the seasonal changes, reaching particularly low temperatures in winter (Riehl et al., 1972; Wallace and Hobbs, 2006).
There are strong interactions among radiative, dynamical, and chemical processes, in the
stratosphere. This leads to more rapid horizontal mixing of gaseous components as compared
to the vertical mixing in the stratosphere. Due to the complexity of the stratospheric
circu-lations the existing global climate models and stratospheric chemistry-climate models fail to
simulate or produce temperature trends or temperature profiles that match with the
observa-tions in the stratosphere (Solomon et al., 2010). Therefore, measuring accurate stratospheric
temperatures is of particular interest in the climate science community.
Upper troposphere - lower stratosphere (UTLS)
The upper troposphere-lower stratosphere (UTLS) plays a key role in radiative forcing and
1.2. Introduction toEarth’s atmosphere 11
upper troposphere and the lower stratosphere, from roughly 5 to 22 km in height. The coupling
between dynamics, chemistry, and radiation is found to be strong in the UTLS. The
under-standing of the chemical and dynamical behavior of the tropopause region, and its long-term
variability has become one of the main interests in atmospheric science. The primary
motiva-tion is to understand the coupled processes in UTLS to identify their role in climate change,
which is a necessity for improving weather and climate model simulations of this region
(Wal-lace and Hobbs, 2006).
The UTLS processes depend crucially on the distribution of greenhouse gases (GHGs),
such as ozone and water vapor, as well as aerosols and clouds. The Fig. 1.2 illustrates some
features of the UTLS region.
Each of the three projects for this thesis provides a means to more accurately measure
temperature and relative humidity in the UTLS, and contributes to our understanding of the
important coupling processes in the UTLS region.
1.2.2
Atmospheric humidity
Water can be found in all three phases in Earth’s atmosphere - solid, liquid, and vapor. The
release of latent heat of water vapor when it condenses into the liquid or solid phase, together
with the Earth’s rotation, drives the large-scale circulation of the atmosphere. Water vapor is
the most dominant greenhouse gas in the Earth’s atmosphere that is highly variable and poorly
understood. Even relatively small changes in the atmospheric water vapor can play a significant
role in the Earth’s atmospheric energy balance (Wallace and Hobbs, 2006).
The amount of the water vapor in the atmosphere can be expressed in many different ways. In this section the various measures of variable atmospheric water vapor content are presented.
Mixing ratio
The mixing ratio is the ratio of mass of the water vapormwv to the mass of the dry airmd in a
certain volume of air and is expressed as
w≡ mwv
md
. (1.1)
The mixing ratio is often expressed in the units of grams of water vapor to kilograms of the dry
1.2. Introduction toEarth’s atmosphere 13
Specific humidity
The specific humidity,qis a measure of the mass of the water vapor with respect to the mass
of air per unit volume defined as,
q= ρwv
ρ , (1.2)
whereρ= ρd+ρwv is the total mass of the air (dry air plus water vapor) per unit volume. The specific humidity is conserved in the absence of mixing or of condensation. In other words,
specific humidity does not vary as the temperature or pressure of an air parcel changes if the
moisture in the air parcel is not removed or added. The stability of the specific humidity makes
it a useful parameter to identify the properties of a moving air mass.
Vapor pressure
The vapor pressure is the partial pressure of the atmospheric water vapor. Vapor pressure can
be expressed as,
e= w
0.622+wP (1.3)
wherePis the total air pressure, assuming water vapor behaves as an ideal gas.
Saturated vapor pressure
The saturation vapor pressure is the partial pressure of the water vapor in equilibrium with
a plane surface of pure water. It solely depends on the temperature. If the temperature is
increased, the molecules will have more internal energy and will vibrate faster. Thus, more
molecules will be able to break free and evaporate from the liquid surface. As a result, the
vapor pressure to increase. For the temperatures below−38◦C water will no longer be found
in the liquid form. Therefore, the saturation will occur over the plane surface of ice instead of
water (Gierens et al., 2000). As the bonds between adjacent molecules are stronger in an ice
surface than they are in a liquid surface, at the same temperature fewer molecules will escape
from an ice surface than from a liquid surface. Therefore, the saturation vapor pressure over
Figure 1.3: Variation with temperature of the saturation vapor pressureesover a plane surface of pure water (red line) and the difference betweenes and the saturation vapor pressure over a plane surface of icees,i (blue line)(Adapted from Wallace and Hobbs (2006)).
There are several existing formulations that allow the estimation of saturation vapor
pres-sure over both water and ice. For this thesis, I use the saturation vapor prespres-sure equations from
(Hyland, 1983).
The saturation vapor pressure over liquid water (es,w) for temperatures below 0◦ is given
by:
loges,w =
−0.58002206×104
T +0.13914993×10
1−0.48640239×10−1×T
+0.41764768×10−4×T2−0.14452093×10−7×T3
+0.65459673×101×log(T).
(1.4)
The saturation vapor pressure over liquid ice (es,i) for ice is given by (Hyland, 1983):
loges,i =
−0.56745359×104
T +0.63925247×10
1−0.96778430×10−2×T
+0.62215701×10−6×T2+0.20747825×10−8×T3
−0.94840240×10−12×T4+0.41635019×101×log(T).
1.2. Introduction toEarth’s atmosphere 15
Relative humidity
Relative humidity is expressed as a ratio of the vapor pressure to the saturation vapor pressure.
Thus, relative humidity can be estimated over water or ice. The general formulation of the
relative humidity is
RH = e es
×100. (1.6)
whereesis the saturated vapor pressure over water or ice. Relative humidity is the most popular
scale in both meteorology and atmospheric science as it has certain advantages over absolute
measures of water vapor concentration. It is usually in the range of 0% (completely dry) and
100% (saturation) where an absolute scale must be much wider because the concentration of
water molecules decreases from the ground to the tropopause by roughly a factor of 10 000
(Gierens et al., 2012). However, there is nothing to forbid relative humidity from exceeding
100%. Such conditions where the relative humidity exceeds 100% are called supersaturation.
Supersaturation is an unstable state if there is no condensed phase. Another advantage is that
cloud formation is controlled by relative humidity, not by absolute humidity (Gierens et al.,
2012).
Ice supersaturation (ISS)
Ice supersaturation is a frequent atmospheric phenomenon that occurs mainly in the UTLS
region where the temperature reaches below the freezing point. In the upper troposphere,
tem-peratures easily go below −40◦C (Gierens et al., 2012). Thus, the super-cooled pure water
droplets would freeze spontaneously. However, if the water droplets are not pure (contain
aerosol particles, etc.) or are highly diluted they will not freeze spontaneously even at
temper-atures below−40◦C. In order for the droplets to freeze, they need to gain more water molecules from the ambient air. That requires ambient water vapor concentration corresponding to
rela-tive humidity with respect to ice to be more than 145%. Ice formation in these relarela-tively high
supersaturation levels are called ISS. ISS can last for hours or even days and the thickness of
such formations can be from 100 m to 3-4 km. The horizontal extensions of the ISS layers
are not well known yet. ISS is often found within cirrus clouds (ice clouds) and contrails, but
atmospheric radiation flow (Gierens et al., 2012). However, it was found that as soon as thin
cirrus clouds form within ISS regions, the radiation effects double by two orders of magnitude (Fusina et al., 2007). Thus, ISS plays an important role in cloud formation and as well as in
Earth’s weather and climate.
1.2.3
Instruments and techniques to measure relative humidity
As discussed in the Overview in Section 1.1, measurements from Raman lidars, typically
ground-based, provide an excellent way to obtain vertical temperature and relative humidity
profiles, and I use the Raman lidar technique in this thesis. Details will be discussed in the
fol-lowing sections. In this section I will provide a brief discussion on other humidity measuring
instruments such as radiosondes, microwave radiometers, and weather satellites.
Radiosonde is the most common atmospheric humidity measuring technique and has been
in use since the late 1930s (DuBois, 2002). Radiosondes play an important role in providing
long-term high-quality time series of climatology trends of various parameters. There are about
1,300 radiosonde launch sites all over the globe and most countries share data with the rest of
the world through international agreements. Almost all routine radiosondes are launched 45
minutes before the official observation times of 0000 UTC and 1200 UTC (Seidel et al., 2011). This provides an instantaneous snapshot of the atmosphere. The radiosonde is a small package
consisting of multiple instruments including sensors that measure pressure, temperature, and
relative humidity, and a GPS that returns position information. The radiosonde is suspended
below a large balloon inflated with hydrogen or helium gas and as the balloon rises at about
5 ms−1 the radio transmitter sends the measurements obtained by the sensors to the ground
station. Radiosondes can provide continuous and detailed profiles from the ground to altitudes
of 30 km and above. The hygristor is the relative humidity sensor employed in the radiosondes
located at a place where the outside air passes can reach. A hygristor consists of a glass
slide or plastic strip covered with a moisture sensitive film of lithium chloride (LiCl) and a
binder; metal strips are located along the edges. The electrical resistance of the LiCl changes
with a change in the atmospheric humidity. The hygristor on most radiosondes is designed to
1.2. Introduction toEarth’s atmosphere 17
Hygristors do not provide accurate measurements of relative humidity at temperatures below
the freezing point. When the radiosonde passes through a cloud or a layer of ice, the humidity
sensor can freeze and it will then either not provide any measurements or measure the humidity
inaccurately. To prevent water condensing on the sensors during the ascent of the balloon,
some radiosonde products now occupy two sensor elements that include heating of the of a
sensor elements (Hopkins). However, the radiosonde technique is still not developed enough
to measure relative humidity over ice in regions below freezing. In Chapters 3 and 4 of this
thesis I use the radiosonde measured relative humidity profiles to compare the relative humidity
retrieved from the Raman lidar measurements. For more details of the radiosonde humidity
measurements and their accuracy refer to Miloshevich et al. (2001); Peixoto and Oort (1996);
Sapucci et al. (2005); Bock et al. (2013), and Dirksen et al. (2014).
Weather satellites are outfitted with various types of sensors that can measure atmospheric
water vapor from space (Jones et al., 2009). The operational meteorological observational
sys-tems use nadir sounding (down-looking) instruments to measure the tropospheric water vapor.
Vertical resolution of the nadir microwave humidity sounders is typically several kilometers
and the horizontal resolution is about 10-15 km at nadir. Nadir observations cover
approxi-mately the entire globe (mostly on polar orbits) and the observations are made in both day and
nighttime. Some of the limitations of nadir observations are: limited altitude information from
pressure broadening, only sensitive to region with largest water abundance (troposphere), and
sensitivity to tropospheric clouds (large ice particles or water drops) (Urban, 2013). Satellites
use the limb sounding technique to measure the trace amounts of water vapor in the upper
troposphere and throughout the entire middle atmosphere with resolution of typically only a
few kilometres. The limb observations in the troposphere and lowermost stratosphere are often
limited by the water, cloud, or aerosol absorption depending on wavelength. Further details
of satellite instruments measuring atmospheric water vapour and observation techniques are
available in Urban (2013).
Microwave radiometer is another instrument that is used to measure atmospheric water
vapor. It can be used as a ground-based instrument to measure humidity from the surface
and it can also be used in satellites to measure humidity from space. Microwave radiometers
Most commercial microwave radiometers operate in the 2060 GHz frequency range, where the
atmospheric thermal emissions are influenced by atmospheric temperature and humidity. A
microwave radiometer consists of an antenna system, microwave radio-frequency components
and a signal processing unit. When appropriate detection frequencies are used, the emission of
microwave radiation from the atmospheric trace gases of liquid water and of ice crystals can
be measured. The emissivity of the substances and their radiative temperature depends on the
substance concentration, pressure, and temperature in the atmosphere. Thus, each substance
can be estimated by measuring its radiative temperature in appropriate frequency bands. The
absorption band of water vapour is located between the frequencies of 20 and 30 GHz. Thus,
measurements of the radiative temperatures in water vapor absorption band allow us to estimate
the integrated water vapour (IWV) content and a profile of absolute humidity. More details of
microwave radiometers are given in L¨ohnert et al. (2009); Hewison (2007), and Liljegren et al.
(2005).
Raman lidars are another potential tool that provides atmospheric humidity measurements
with high spatial and temporal resolution. In this thesis I use the Raman lidar measurements to
retrieve relative humidity and details will be discussed in Section 1.3.
HATPRO Radiometers, dropsondes, and aircraft based instruments are a few other
atmo-spheric humidity measuring techniques. Further details of these instruments and comparisons
of measurements made by each instrument are available in Soden and Lanzante (1996),
Wal-lace and Hobbs (2006), and Buehler et al. (2004).
1.3
Lidars and atmospheric measurements
General description of a lidar
The lidar (light detection and ranging) technique is an active remote sensing technique. It is
one of the tools that has the ability to measure the atmosphere at ambient conditions with high
temporal and spatial resolution, and the potential of covering large altitude ranges in the
atmo-sphere. A typical lidar system (shown in Fig. 1.4) consists of a transmitting system (laser) and a
receiving system (telescope, optical analyzer, etc). Lidars emit light pulses into the atmosphere
1.3. Lidars and atmospheric measurements 19
that is scattered back is collected by the lidar telescope. Using the lidar’s photon detecting
sys-tem the amount of backscattered light can be measured as a function of altitude. Depending on
the type of interaction processes of the emitted light with the atmospheric constituents, diff er-ent atmospheric parameters and conditions such as temperature, humidity, ozone, particulates,
cloud and wind can be detected (Weitkamp, 2006). To improve the precision of the detection
Figure 1.4: Schematic drawing of lidar system.
the lasers used in the lidars are monochromatic (i.e. one colour /one wavelength), collimated (i.e. very small divergence over large distances), intense (i.e. lots of energy in a small area) and
polarized (i.e. energy is aligned in one direction). There are different types of lidars depending on the laser used and the type of scattering studied. Different types atmospheric scattering are discussed in the next section. The main 5 basic lidar techniques are, elastic-backscatter lidar,
differential absorption lidar (DIAL), Raman lidar, fluorescence lidar, and Doppler lidar. For all three projects in this thesis I am interested in the measurements from Raman lidars and
atmospheric Raman scattering processes.
As shown in Fig. 1.4, the lidar receiving system consists of a telescope that collects all the
backscattered light, an optical analyzer where the signal is spectrally separated, amplified and
and stored in a computer unit. The diameter of the telescope depends on the purpose of the
lidar and it can vary from 0.1 m to a few meters. The optical analysis of the backscattered light
is often done before the detection. In most cases interference filters are placed in front of the
detector to allow only a certain pass-band around the wavelength of interest enter the detector
(Kovalev and Eichinger, 2004).
Signal detection is typically realized with photomultiplier tubes (PMTs). PMTs are very
sensitive and is used when the backscatter signal is weak ( <10 MHz). PMTs store only the
number of photon counts per time interval after emission of the laser pulse. The efficiency of a PMT to measure and record pulses depends on the time taken up by all components of
the signal processing. The number of photons detected by the PMTs can be measured using
a photon counting system. There are two types of counting systems, nonparalyzable systems
that require a fixed recovery time and paralyzable systems that don’t. The fixed recovery time
of a counting system is called the dead time of the system. In a paralyzable system if the
time gap between two signals reaching the detector is larger than dead time then the event
will be recorded. Thus, the observed rate is equal to the rate at which time intervals occur
that exceed dead time. The main difference between the two types of counting systems is that nonparalyzable detector systems are not effected if the signal is not processed whereas paralyzable detector systems are effected (Wandinger, 2005a).
In lidars for strong backscatter signals typically the measurements in lower altitudes are
recorded using analog recorders where the average current produced by the photo pulses is
measured. Then analog-to-digital signal conversion and digital signal processing need to be
performed (Wandinger, 2005a).
Atmospheric scattering related to lidar
Atmospheric scattering is the redirection of the original path of electromagnetic (EM) radiation
(i.e. an incident light ray) traveling through the atmosphere due to particles or gas molecules
present in the atmosphere. As the EM wave interacts with the atmospheric particles or gas
molecules the electron’s cloud within the atmospheric constituent starts to oscillate periodically
with the same frequency as the incident EM wave. This oscillation later induces a dipole
1.3. Lidars and atmospheric measurements 21
of EM radiation, thereby resulting in scattered light. The atmospheric scattering depends on
the wavelength of the incident radiation and also on the size of the atmospheric constituent that
scatters the radiation. In this section, I will briefly discuss three main atmospheric scattering
processes: Mie scattering, Rayleigh scattering, and Raman scattering.
Rayleigh scattering is the most dominant scattering mechanism in the upper atmosphere
and it is a type of an elastic scattering, meaning Rayleigh scattered radiation has the same
frequency as the incident radiation. Rayleigh scattering occurs when particles are very small
compared to the wavelength of the radiation. These could be particles such as small specks of
dust or nitrogen and oxygen molecules (Kovalev and Eichinger, 2004).
The intensity of Rayleigh scattering varies inversely with the fourth power of the
wave-length (λ−4). Rayleigh scattering is the phenomenon behind the sky appearing blue during the
day and red/orange during sunrise and sunset. As sunlight travels through the atmosphere, the shorter wavelengths (i.e. blue) of the visible spectrum scatter more than the longer
wave-lengths. At sunrise and sunset, the light has to travel farther through the atmosphere than
daytime. Hence, the scattering of the shorter wavelengths is more complete and this allows a
greater proportion of the longer wavelengths of the visible spectrum to penetrate through the
atmosphere (Kovalev and Eichinger, 2004).
For the atmosphere, assuming that the scattering is from a spherically symmetric molecule
the total Rayleigh scattering cross-section can be approximated (Kovalev and Eichinger, 2004):
σ' 32π
3
3λ4
n−1
N
!2
(1.7)
whereNis the number density of the molecules andnis the refractive index.
When using Rayleigh scattering for diagnostics usually the scattered light is collected over
a limited solid angle. Therefore, it is useful to define a differential cross-section for Rayleigh scattering such that
∂σ ∂Ω '
4π2
λ4
n−1
N
!2
sin2φ, (1.8)
whereφis the scattering angle andΩis the solid angle (Kovalev and Eichinger, 2004).
Mie scattering is an elastic scattering that occurs due to the particles that are about the
vapor molecules, and other large atmospheric molecules cause Mie scattering. The Mie
sig-nal is proportiosig-nal to the square of the particle diameter and is much stronger than Rayleigh
scattering.
Raman scattering is an inelastic process where monochromatic light or photons is scattered
offa molecule at a different wavelength than the incident. Thus, the scattered photons energy will be different than the incident photon. The change in energy is proportional to the rotational or vibrational energy levels of the atom or the molecule that the photon scattered off(Kovalev and Eichinger, 2004). As shown in Fig. 1.5, the scattered photon can either gain energy from
Figure 1.5: The different types of light scattering: Rayleigh scattering (no exchange of en-ergy: incident and scattered photons have the same energy), Stokes Raman scattering (atom or molecule absorbs energy: scattered photon has less energy than the incident photon) and anti-Stokes Raman scattering (atom or molecule loses energy: scattered photon has more energy than the incident photon).
the interaction and shift to a higher frequency (red-shift) or lose energy from the interaction and
shift to a lower frequency (blue-shift). The processes of gaining and losing energy are known
as Stokes and anti-Stokes shift respectively. The frequency shift for the scattering molecules is
given by,
∆v˜= v˜i−v˜s=
∆E
hc (1.9)
1.3. Lidars and atmospheric measurements 23
between the molecular energy levels involved,his the Planck’s constant, andcis the speed of
light in a vacuum.
Figure 1.6: Raman backscatter spectrum of the atmosphere for an incident laser wavelength of 355 nm, normal pressure, a temperature of 300 K, an N2 and O2 content of 0.781 and 0.209, respectively, and a water-vapor mixing ratio of 10 g/kg. The curves for liquid water and ice are arbitrarily scaled. (Figure 9.2 in Wandinger (2005b))
Since the scattering targets of interest are mostly diatomic molecules in the atmosphere such
as nitrogen and oxygen, I expect that there will be an energy shift due to both the vibrational and
rotational transitions as shown in Fig. 1.6. The vibrational energy transition levels for diatomic
molecules can be approximated using the model of a freely rotating harmonic oscillator:
Evib,v =hc0vvib(˜ v+1/2), for v=0,1,2, .... (1.10)
where vvib is the specific vibrational wave-number of the molecule and v is the vibrational
quantum number (Behrendt, 2005). For the energy levels for the rotational quantum numbers
is approximated by,