An improved Genetic Algorithm for Scheduling Resources in a
Hetero-Gene Cloud: IaaS
S Noureen1, P Munisekhar2
1
Department of CSE, J.N.T.U Anantapur, Tirupathi, Andhra Pradesh, India, [email protected]
2
Departments of CSE, J.N.T.U Anantapur, Hyderabad, Andhra Pradesh, India, [email protected]
Abstract
Under the rising of applications in Cloud computing platform, it's an enormous challenge of utilizing the cloud infrastructure with efficiency for work-flow apps. The Work-flow means that death penalty a sequence of actions therefore on end employment. Since we've got several recent studies on resource coming up with, solely restricted consecutive studies are created towards cloud platform. Moreover, resents studies don't tolerate suppleness and therefore the entomb profile VMs the. We tend to propose a completely unique resource allocation algorithmic rule for Requests-VM mappings in a very medium to massive cloud infrastructures. In our model we tend to contemplate all properties of the request and VMs like necessities, time, deadlines, on the market VM configurations etc., our model is predicated on the genetic algorithmic rule to produce a best resolution for work-flow apps in evaluating the simplest sequence of jobs to be allotted on VMs, the results of this work shows that the all jobs are finished among the predefined deadlines at less resource value.
Keywords: Mapping, Link Assignments, PSO, Meta -Heuristic Optimization, Qos, Workflow, IaaS.
1. Introduction
Work flows are oft accustomed model massive scale scientific issues in areas like bioinformatics, astronomy, and physics. Such scientific workflows have ever-growing information and computing necessities and thus demand superior computing surroundings so as to be dead in a very affordable quantity of your time. These workflows square measure ordinarily sculptural as a collection of tasks interconnected via information or computing dependencies. The orchestration of those tasks onto distributed resources has been studied extensively over the years that specialize in environments like grids and clusters. However, with the emergence of recent paradigms like cloud computing, novel approaches that address the actual challenges and opportunities of those technologies have to be compelled to be developed.
1.1 Existing system
1.1.1 Network Cloud Mapping
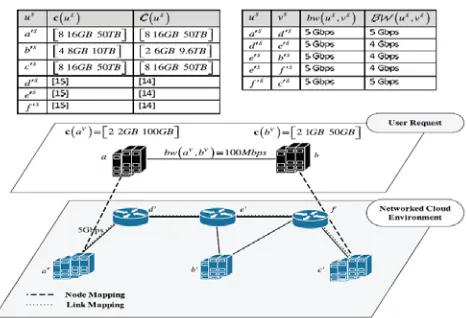
A networked cloud request is modeled as a weighted purposeless graph denoted by .Where represents the set of virtual nodes and the set of virtual links. Similarly, the substrate network is modeled as a weighted purposeless graph Gs= (Ns, Es).Non practical attributes area unit CPU capability, Memory, Storage capability, variety per sort of offered network interfaces. Of these can formulate at a node as a capability and it's pictured as where represents the node. Link between any 2 nodes (substrate or virtual) can forms a position (E) pictured as equally band dimension between the nodes n, m is pictured as .
1.1.2 Mixed Integer Programming
1.1.2.1 Resource Mapping
It includes mapping of physical resources on to the networked cloud. The physical resources accommodate substrate nodes, links, and paths [1]. Resource mapping is comprised of two phases particularly,
Node Assignment/Mapping
Link Assignment/ Mapping
1.1.3 Node Mapping
Each virtual node from an equivalent networked cloud request should be allotted to a special substrate node.
If then
If then whereas mapping virtual requested node to substrate node the requested capability shouldn’t exceed remaining capability of substrate node.
The remaining capability is calculated as a distinction of actual capability of node to the allotted capability and
S V N
N N
M : →
) ( )
( V N V
N n M m
M = V V
m
n =
) ( )
( i S
V
i n C n
therefore the remaining ought to be most once allocation in step with MIP.
1.1.4 Link Mapping
1.2 Limitations of Existing System
No Coordination between the phases.
Usage of two distinct algorithms for node and link mapping phases.
Number of comparisons is additional for mapping resource.
Performs Unit Mapping of nodes.
On-demand service for grid computing for obtainable resource provisioning choice.
K-nearest neighbor’s formula was applied to predict the demand of resources.
2. Proposed System
We style associate improved Genetic rule for programming resources during a hetero-gene Cloud: IaaS that guarantees running-cost reduction, high performance, allocation controlled by deadlines, etc., in programming workflow apps in hetero-gene IaaS Cloud Computing. Our model may also tolerate variations of VM performance. We calculate the bets fitness of the VM to an invitation by all issues and sequence of VMs corporal punishment employment. Through genetic rule we discover the most effective sequence of little latency and least running- value.
2.1 Advantages of Proposed System
Because of Z-values the quantity of comparisons are reduced.
Coordination between the phases as each done at a time.
Can win Bulk Mapping.
Reduces the wastage of resources.
Allows for a versatile, structured, and comparative performance analysis.
The capability of physical resources is often multiplexed among requested resources permitting America to accommodate additional requests.
It adopts a heuristic methodology for resource allocation.
2.2 System Architecture
Fig .1 Networked Cloud environment and request mapping
3. Related Work
Workflow planning on distributed systems has been wide studied over the years and is NP-hard by a discount from the digital computer planning downside [7]. So it's not possible to get associate degree optimum answer inside polynomial time and algorithms concentrate on generating approximate or near-optimal solutions. Various algorithms that aim to seek out a schedule that meets the user’s QoS necessities are developed. a huge vary of the planned solutions target environments similar or adequate community grids. This suggests that minimizing the application’s execution time is usually the planning objective, a restricted pool of computing resources is assumed to be on the market and also the execution value isn't a priority. For example, Rahman et al. [9] propose an answer supported the workflow’s dynamic essential methods, subgenus Chen associate degreed Zhang [10] elaborate an algorithmic program supported hymenopter colony improvement that aims to satisfy completely different user QoS necessities and, finally, Yu and Buyya use Genetic Algorithms to implement a budget forced planning of workflows on utility Grids [1].
Another recent work on advancement ensemble developed for clouds is bestowed by Malawski et al. [7]. They propose varied dynamic and static algorithms that aim to maximize the quantity of labor completed, that they outline because the range of dead workflows, whereas meeting QoS constraints like point in time and budget.
S V E
P
E
M
:
→
)) ( ), ( ( ) ,
( V V S N V N V
E n m P M n M m
Their solutions acknowledge completely different delays gift once managing VMs hired from IaaS cloud suppliers like instance acquisition and termination delays. Moreover, their approach is powerful within the sense that the task’s calculable execution time could vary supported a regular distribution and that they use a price margin of safety to avoid generating a schedule that goes over budget. Their work, however, considers solely one variety of VM, ignoring the heterogeneous nature of IaaS clouds.
While the algorithms given by Mao and Humphrey[10] and Madawaska et al. [9] are designed to figure with advancement ensembles, they're still relevant to the work exhausted this paper since they were developed specifically for cloud platforms and as thus embody heuristics that attempt to introduce the platform’s model. Additional in line with our work is that the answer given by Abrishami et al. [0] that presents a static algorithmic program for programming one advancement instance on AN IaaS cloud. Their algorithmic program is predicated on the workflow’s partial vital methods and it considers cloud features such as VM heterogeneousness, pay-as-you-go and time RODRIGUEZ AND BUYYA: point in time based mostly RESOURCE PROVISIONING AND programming algorithmic program FOR SCIENTIFIC WORKFLOWS... 223 interval valuation models. They fight to attenuate the execution value supported the heuristic of programming all tasks during a partial vital path on one machine which might end the tasks before their latest end time (which is calculated supported the application’s point in time and therefore the quickest out there instance). However, they are doing not have a worldwide optimization technique in situ capable of manufacturing a near-optimal solution; instead, they use a task level optimization and thus fail to utilize the complete advancement structure and characteristics to get a stronger answer.
Other authors have used PSO to unravel the work flow planning downside. Pandey et al. propose a PSO based mostly algorithmic rule to attenuate the execution price of one work flow whereas equalization the task loads on the obtainable resources. Whereas the price step-down objective is extremely desired in clouds, the load equalization one makes a lot of sense during a non-elastic setting like a cluster or a grid. The execution time of the work flow isn't thought of within the planning objectives and thus this price is significantly high as results of the price step-down policy. The authors don't think about the snap of the cloud and assume a set t of VMs is out there beforehand. For this reason, the answer bestowed is analogous to those used for grids wherever the schedule generated could be a mapping between tasks and resources rather than a a lot of comprehensive schedule indicating the quantity and sort of resources that require to be hired,
after they ought to be no heritable and free, and within which order the tasks ought to be dead on them.
4. Particle Swarm Optimization
Particle swarm improvement is AN organic process procedure technique supported the behavior of animal flocks. It was developed by Eberhart and Kennedy [4] in 1995 and has been wide researched and utilized ever since. The algorithm may be a random improvement technique within which the most basic conception is that of particle. A particle represents an individual (i.e., fish or bird) that has the power to move through the outlined drawback area and represents a candidate resolution to the improvement drawback. At a given point in time, the movement of particles is outlined by their velocity, that is portrayed as a vector and so has magnitude and direction. This rate is decided by the best position within which the particle has been thus far and also the best position within which any of the particles has been thus far. Based on this, it's imperative to be able to live however good (or bad) a particle’s position is; this is often achieved by using a fitness perform that measures the standard of the particle’s position and varies from drawback to drawback, depending on the context and needs.
Each particle is portrayed by its position and rate. Particles keep track of their best position pbest and also the world best position gbest; values that area unit determined supported the fitness operate. The algorithmic program can then at every step, modification the speed of every particle towards the pbest and gbest locations. What proportion the particle moves towards these values is weighted by a random term, with totally different random numbers generated for acceleration towards pbest and gbest locations [8]. The algorithmic program can still restate till a stopping criterion is met; this is often typically a such that most range of iterations or a predefined fitness price thought-about to be ok. The pseudo code for the algorithm is shown in algorithmic program one. In every iteration, the position and rate of a particle area unit updated based mostly in Equations (7) and (8) respectively:
Xi((t+1)=xi(t)+vi(t)---(7)
Vi(t+1)=w.vi(t)+c1r1(xi(t)-xi(t))---(8)
Where:
w=inertia,
ci=acceleration coefficient,i=1,2
ri=random number,i=1,2 and riꞒ[0,1]
xi*=best position of particle i
The velocity equation contains numerous parameters that affect the performance of the algorithm; furthermore, some of them have a major impact on the convergence of the algorithm. one amongst these parameters is v, that is thought as the inertia issue or weight and is crucial for the algorithm’s convergence. This weight determines what quantity previous velocities can impact the present rate and defines a tradeoff between the native psychological feature element and world social expertise of the particles. On one hand, a large inertia weight can create the rate increase and so will favor world exploration. On the opposite hand, a smaller value would create the particles decelerate and thence favor local exploration. For this reason, a v price that balances global and native search implies fewer iterations so as for the algorithmic rule to converge.
4.1 Algorithm for Practical Swarm Optimization
1. Set the dimension of the particles to d
2. Initialize the population of particles with random positions and velocities
3. For each particle, calculate its fitness value 3.1 Compare the particle’s fitness value
with the particle’s pbest. If the current value is better than pbest then set pbest to the current value and location
3.2 Compare the particle’s fitness value is better than gbest then set gbest to the current value and location
3.3 Update the position and velocity of particle according to equations 7 and 8 4. Repeat from step 3 until the stopping criterion is met.
5. Literature Survey
5.1 Study about A particle swarm optimization for reactive power and voltage control considering voltage stability
This paper presents a particle swarm optimization for reactive power and voltage control considering voltage stability. The proposed method determines a control strategy with continuous and discrete control variables such as AVR operating values, OLTC tap positions, and the amount of reactive power compensation equipment. The method also considers voltage stability using a continuation power flow technique. The feasibility of the proposed method is demonstrated on model power systems with promising results. Reactive power and voltage management (Volt/Var Control: VVC) determines AN on-line management strategy for keeping voltages of target
power systems considering variable masses in every load purpose and reactive power balance in target power systems. Conventionally, VVC is sometimes accomplished supported power flow sensitivity analysis of the operation purpose considering execution time and out there information from the actual target facility. Recently, voltage stability problem has been dominating and therefore the thought of the stability has been needed in VVC downside. Since quick computation of voltage stability is needed for VVC, continuation power flow (CPFLOW)[3] is suitable for the calculation. The authors has been developed a sensible CPFLOW And verified it with an actual facility [4].
5.2 Study about The use of particle swarm optimization for dynamical analysis in chemical processes
Particle Swarm Optimizers square measure inherently distributed algorithms wherever the answer for a problem emerges from the interactions between several easy individual agents known as particles. This article proposes the employment of the Particle Swarm Optimizer as a replacement tool for data processing. In the initial section of our analysis, 3 totally different Particle Swarm data processing Algorithms were implemented and tested against a Genetic rule and a Tree Induction rule (J48). From the obtained results, Particle Swarm Optimizers established to be an acceptable candidate for classification tasks. The second section was dedicated to rising one in every of the Particle Swarm optimizer variants in terms of attribute sort support and temporal complexness. The data sources here used for experimental testing square measure normally used and regarded as a de facto standard for rule discovery algorithms responsibility ranking. The results obtained in these domains seem to point that Particle Swarm data processing Algorithms square measure competitive, not only with different organic process techniques, however additionally with business commonplace algorithms like the J48 algorithm, and may be with success applied to a lot of strict drawback domains
.
5.3 Study about An ant colony optimization approach
to a grid workflow scheduling problem with various QoS requirements
necessities is difficult and it considerably influences the performance of grids. By now, there are some algorithms for grid progress pragramming; however most of them will solely tackle the issues with one QoS parameter or with small scale workflows. during this frame, this paper aims at proposing associate hymenopterans colony optimization (ACO) rule to schedule large-scale workflows with varied QoS parameters. This rule permits users to specify their QoS preferences also as outline the minimum QoS thresholds for an explicit application. the target of this rule is to seek out an answer that meets all QoS constraints and optimizes the user-preferred QoS parameter. supported the characteristics of workflow programming, we have a tendency to style seven new heuristics for the ACO approach associated propose an adjective theme that enables artificial ants to pick heuristics supported secretion values. Experiments are worn out 10 progress applications with at the most one hundred twenty tasks, and the results demonstrate the effectiveness of the planned rule.
6. Simulated Result
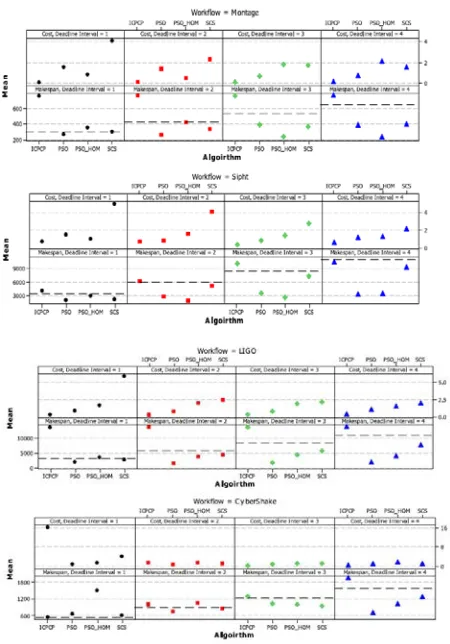
The performance of IC-PCP for the LIGO progress is that the same as for the SIPHT application; it achieves very cheap average cost in each case however produces the schedules with the longest execution times, that area unit well higher than the point value for the four intervals. PSO and SCS on the opposite hand meet on the average the point on each case with PSO producing the foremost economical schedules with shorter makespans and lower costs. Overall, we have a tendency to found that IC-PCP is capable of generating low value schedules however fails to fulfill the point in these cases. SCS is incredibly economical once generating schedules that meet the point however as a result of it's a dynamic and heuristic based approach, its value optimization isn't nearly as good as that obtained by our answer. we have a tendency to found that in each case in which each algorithms meet the point, our approach incurs in cheaper prices, in some cases generating not solely cheaper however quicker solutions. for sure, PSO performs better than PSO_HOM.
Fig. 2 Line plot of mean make span (ms) and mean value (USD) for every work flow and point in time interval. The reference line on every panel indicates the deadline price of the corresponding point in time interval.
7. Conclusion
undefeated in meeting deadlines as SCS, which may be a dynamic formula. Also, within the best situations, when our heuristic, SCS and IC-PCP meet the deadlines, we are able to turn out schedules with lower execution prices.
8. Future work
As future work, we'd prefer to explore completely different options for the choice of the initial resource pool because it has a significant impact on the performance of the algorithmic rule. We would conjointly prefer to experiment with completely different improvement strategies like genetic algorithms and compare their performance with PSO. Another future work is extending the resource model to contemplate the info transfer value between knowledge centers so VMs is deployed on completely different regions. Extending the algorithmic rule to incorporate heuristics that guarantee a task is appointed to a VM with ample memory to execute it'll be enclosed within the algorithmic rule. Finally, we aim to implement our approach in an exceedingly progress engine thus that it is used for deploying applications in world environments.
References
[1] G. Juve, A. Chervenak, E. Deelman, S. Bharathi, G. Mehta, and K. Vahi, “Characterizing and profiling scientific workflows,” Future Generation Comput. Syst., vol. 29, no. 3, pp. 682–692, 2012.
[2] P. Mell, T. Grance, “The NIST definition of cloud computing recommendations of the National Institute of Standards and Technology”
Special Publication 800-145, NIST, Gaithersburg, 2011.
[3] R. Buyya, J. Broberg, and A. M. Goscinski, Eds., Cloud Computing: Principles and Paradigms, vol. 87, Hoboken, NJ, USA: Wiley, 2010.
[4] J. Kennedy and R. Eberhart, “Particle swarm optimization,” in Proc. 6th IEEE Int. Conf. Neural Netw., 1995, pp. 1942–1948. [5] Y. Fukuyama and Y. Nakanishi, “A particle swarm optimization for reactive power and voltage control considering voltage stability,” in Proc. 11th IEEE Int. Conf. Intell. Syst. Appl. Power Syst., 1999, pp. 117–121.
[6] C. O. Ourique, E. C. Biscaia Jr., and J. C. Pinto, “The use of particle swarm optimization for dynamical analysis in chemical processes,” Compute. Chem. Eng., vol. 26, no. 12, pp. 1783– 1793, 2002.
[7] T. Sousa, A. Silva, and A. Neves, “Particle swarm based data mining algorithms for classification tasks,” Parallel Comput., vol. 30, no. 5, pp. 767–783, 2004.
[8] M. R. Garey and D. S. Johnson, Computer and Intractability: A Guide to the NP-Completeness, vol. 238, New York, NY, USA: Freeman, 1979.
[9] M. Rahman, S. Venugopal, and R. Buyya, “A dynamic critical path algorithm for scheduling scientific workflow applications on global grids,” in Proc. 3rd IEEE Int. Conf. e-Sci. Grid Comput. 2007, pp. 35–42. 234 IEEE TRANSACTIONS ON CLOUD COMPUTING, VOL. 2, NO. 2, APRIL-JUNE 2014 [10] W. N. Chen and J. Zhang, “An ant colony optimization approach to a grid workflow scheduling problem with various QoS requirements,” IEEE Trans. Syst., Man, Cybern., Part C: Appl. Rev., vol. 39, no. 1, pp. 29–43, Jan. 2009.
S.Noureen received the B.Tech Degree in Computer Science and Engineering from Chadalawada Ramanamma Engineering College, University of JNTUA in 2012.She is currently working towards the Master’s Degree in Computer Science and Engineering, in Shree Institute of Technology & Sciences University of JNTUA. She interest lies in the areas of Web Development Platforms, SQL, and Cloud Computing Technology.