Interval Type 2 Fuzzy Logic Control of Mobile Robots
Full text
Figure
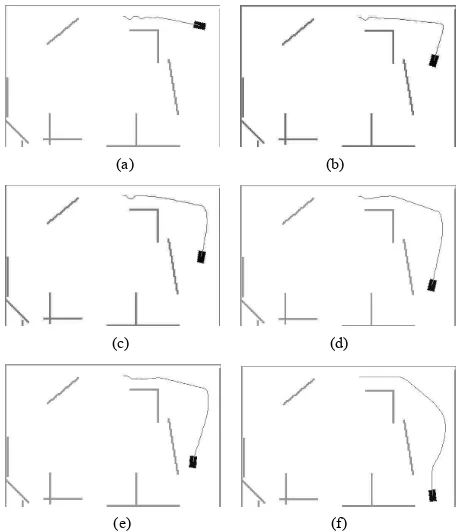
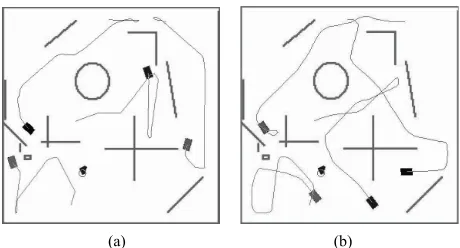
![Figure 9. Initial chosen robot position (position = [105 179]).](https://thumb-us.123doks.com/thumbv2/123dok_us/29414.502916/6.595.330.505.417.586/figure-initial-chosen-robot-position-position.webp)
Related documents
An efficient intrusion detection system based on hypergraph - Genetic algorithm for parameter optimization and feature selection in support vector
PSVM was introduced by Li, Artemiou and Li (2011) and it uses a slightly modified version of the classic Support Vector Machines (SVM) algorithm introduced by Cortes and Vapnik
The generic algorithm (for either model) takes a set of policy parameters θ and a sample size M as input, and returns an estimate of the posterior moments of the gradient of
I use a probit model to predict outcomes of spread bets and find that home teams are at a disadvantage for beating the spread, being the underdog increases a home team’s likelihood
Spectrum investors receive asset allocation, discretionary investment management and trade execution services with respect to the assets invested in the accounts (“the
Follow verification process to prevent outside entities from adjusting content Establish fluent communication process with staff to aid in verification process Promote special
Social sciences can analyse the diversity of situations, the resulting inequalities in production factor allocation and the possibilities to compensate them through relevant
