Abstract— In most research work of wireless sensor network, several objectives concerned with node deployment are issued such as, coverage, network connectivity, network lifetime, network latency, energy consumption, energy efficiency. For redundant nature of random node deployment, realistic optimization strategy is necessary to satisfy simultaneously more than one objectives. In addition, appropriate objective functions are necessary for decision variables of certain solutions due to conflicting nature of each objective. In this work, the two objective functions are considered for maximum coverage and maximum energy efficiency in multiobjective optimization problem. For selecting appropriate objective functions, objective functions for global and local optimization are tested by genetic algorithm in multiobjective optimization problem. In simulation study, Pareto optimal solutions of genetic algorithm for two objectives are analysized for right choice of objective functions. The results illustrated in this work are feasible in accordance with Pareto Front in objective space for unconstrained multiobjective optimization.
Index Terms— Objective Function, Multiobjective Optimization, Node Deployment, Wireless Sensor Network.
1) INTRODUCTION
For random deployment of nodes in wireless sensor network (WSN), redundant deployment and active nodes scheduling are adopted to achieve maximum coverage. Diverse performance metrics of WSN are necessary to optimize in random node deployment. For example, energy efficiency is major concern in node replacement and network coverage is important for quality of service (QoS). Because of conflicting in performance metrics with each other, optimizing the performance of WSN is vital in their real applications. Among several performance metrics for WSN, more than one of these metrics are chosen as optimization objectives and the rest are constraints in optimization. To optimize two or more objective functions at the same time, several algorithms have been developed for multiobjective optimization [1] - [3]. Population based evolutionary algorithms (EAs) are appropriate to solve multiobjective optimization problem. Some components of EA are representation, fitness assignment and population. To diverse optimization performance metrics, genetic algorithms (GAs), one of major EAs, have been used in multiobjective optimization. In
Manuscript received June, 2018.
Dr. Khin Kyu Kyu Win is with the Department of Electronic
Engineering of Yangon Technological University, Gyogone, Insein PO, 11011, Yangon, Myanmar.
Phyu Phyu Thant is with the Department of Electronic Engineering of
Yangon Technological University, Gyogone, Insein PO, 11011, Yangon, Myanmar (corresponding author to provide phone: 09251167687.
solving problem, GA can deal with several objective functions whether they are stationary or transient, linear or nonlinear, and continuous or discontinuous. In most GAs, representation of each solution is a sequence of populations. Each solution is assigned a fitness value that is given by an objective function or fitness function. For solving diverse multiobjective optimization problems, multiobjective GA is implemented to be utilized Pareto optimal solution. The set of this solution provides with a set of flexible trade-offs for multiple objectives. Multiobjective GA can address for optimal node deployment to satisfy multiple objectives in WSN, such as maximum coverage, maximum energy efficiency, minimum delay, etc [4]. For optimization problem with multiple objectives in WSN, optimization algorithms and objective functions are necessary to consider. Optimization algorithms are more diverse than the types of objective functions. But, appropriate objective function is more impact than the specific choice of optimization algorithm.
In this paper, influences of different objective functions are analysized by using multiobjective GA optimization algorithm for node deployment in WSN. The rest of paper is organized as follows. Section II includes the two specific objective metrics and problem statement. Optimization strategies are discussed in Section III. Analysis of objective functions with simulated results are shown in Section IV. Section V concludes the analysis on multiobjective optimization for selection of appropriate objective functions.
2) PROBLEM STATEMENT AND OBJECTIVE MAT RICS
Different applications of WSN require specific QoS requirements. Objective Metrics used for characterizing QoS are coverage area, delay, number of active nodes, bit-error rate and network lifetime. In some case, lifetime of the network reduces when more energy is consumed by the nodes. The compromise between multiple metrics is needed without conflicting each other.
1) Coverage
The coverage in WSN corresponds to the sensing range of sensor node. The coverage quality of entire 2D region is most commonly considered in research work. In this area coverage, each point in the region is observed by at least one sensor node. Sensing disk model is normally defined for area coverage problem. All points within a disk model centered at the node are considered in node coverage [5].
Assumption is that the monitoring area A is divided into m×n points in 2D and m×n monitoring target. Given sensor nodes N is deployed in area A. For optimal coverage of whole network, local neighborhood coverage of sensor node i with coordinate (xi, yi) is computed as follow;
Selecting Objective Functions for Multiobjective
Optimization in Wireless Sensor Network
i k u i u P R N m n N
(1)ui represents special neighborhood of node i and Pk represents combined coverage of target k. Nu is the number of neighborhood. The optimization goal is maximization of neighborhood coverage of Ri of node i.
2) Energy Efficiency
Energy efficiency is closely related to network lifetime. To increase network lifetime, it is necessary to utilize sensor nodes in an efficient manner. Given communication bandwidth W, energy efficiency of node i is computed as follows; 2 log (1 i) i i W p (2) γi denotes the signal-to-interference-plus-noise ratio (SINR) at the destination receiver relative to node i and pi is transmission power of node i. The optimization goal is to adjust sensing range of node i with minimization of SINR for the sake of energy conservation.
3) OPTIMIZATION STRATEGIES
In this paper, multiobjective optimization problem is determined the problem of finding a vector of two decision variables which optimizes a vector function. The elements of vector function represent the objective functions as computable functions of decision variables. Given n variables and m (m>1) objectives, multiobjective optimization problem can be formulated as
min ( )f x min[ ( ),f x1 f x2( ),...,fm( )]x (3)
with inequality constraints g xi( )0,i1, 2,...,mie or equality constraints h xi( )0,j1, 2,...,meq. It is noted
that n
xR with Rn
being decision space and ( ) m
f x R with m
R representing objective space. For the minimization of m objectives f x1( ),f x2( ),...,fm( )x , it is important to a
achieve feasible solution. When this solution is not dominated by any other solutions in feasible space Ω, it is Pareto optimal solutions of objective functions [6].
Definition (Pareto Optimality): A point *
x is Pareto Optimal if for every x and I{1, 2,..., }k either,
*
( ( ) ( ))
i I f xi f xi
Or, there is at least one iI such that
*
( ) ( )
i i
f x f x 3) Multiobjective Genetic Algorithm
In general, genetic algorithms are based on genetic and evolutionary theory and can be used for solving diverse
optimization problems. By operating on
generation-by-generation basis, a number of Pareto Optimal solutions can be found throughout the evolution generations. The Pseudo code for multiobjective genetic algorithm is as follow [7].
Step 2: Evaluate Objective Values
Step 3: Assign Rank Based on Pareto Dominance Step 4: Compute Niche Count
Step 5: Assign Linearly Scaled Fitness Step 6: Assign Shared Fitness
Step 7: For i=1 to G
Selection via Stochastic Universal Sampling Single Point Crossover
Mutation
Evaluate Objective Values
Assign Rank Based on Pareto Dominance Compute Niche Count
Assign Linearly Scaled Fitness Assign Shared Fitness
End Loop
4) SIMULATED RESULTS AND DISCUSSIONS
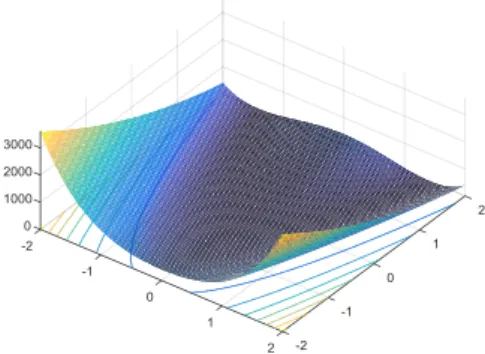
In this analysis of multiobjective optimization problem, solver is gamultiobj from optimization toolbox of Matlab. To identify right objective functions for defined objective metrics, two functions are used as a standard such as De Jong’s function 2 and Rastrigin’s function. First function, De Jong’s function 2 is a classic optimization problem and global minimum is inside a long, narrow, parabolic shape flat valley. This function is with slow convergence when trying to minimize. It has a unique minimum at the point (1, 1) when the function value is zero. Visualization of this function is shown in Fig. 1.
Figure 1. Plot of De Jong’s Function 2
The second function, Rastrigin’s function is highly multimodal with cosine modulation to produce many local minima. The location of minima is regularly distributed with a global minimum at (0,0). This function can be visualized in Fig. 2.
Suppose the function of objective 1 is taken as De Jong’s function 2, it is necessary to determine the objective function for second objective to compromise two objectives. In this work, second objective function is randomly selected and determined its appropriateness by using Pareto optimal solutions. If the pattern of points (Pareto Front – PF) given from Pareto optimal solutions of these two objective functions in objective space are according to the illustrated curve in Fig. 3, tradeoffs between objective 1 and objective 2 can be clearly seen.
Figure 3. Pareto Front of Unconstrained Multiobjective Optimization
Based on ideal solution in Fig. 3, a square indicates the joint minimum of two objective functions. The remaining solutions marked as solid circles are non-dominated and dominated by at least one solution of the PF. If both objective functions obtain ideal solution as an illustrated in PF curve, standard function for objective 1 and selected function for objective 2 is appropriate for decision making of multiobjective optimization problem. Fig. 4 illustrated the PF of De Jong’s function 2 and selected objective function. The selected objective function is defined as follow.
4 2 4 2 2
1 10 1 1 2 2 1 2
f x x x x x x x R m
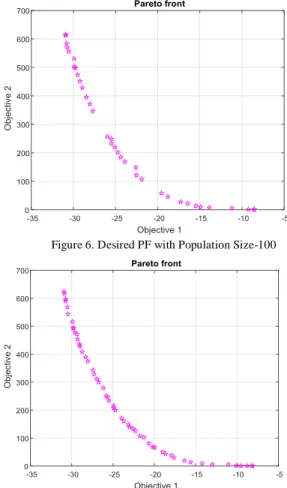
When simulation is used with multiobjective GA solver, results in Fig. 5 illustrates the PF of Rastrigin’s function for objective 1 tested with selected function for objective 2. Comparing these two PFs in Fig. 4 and Fig. 5, the right choice of De Jong’s function 2 and selected objective function can satisfy simultaneously multiobjective optimization problem using specific optimization algorithm GA. When testing the simulation, the solver is gamultiobj, desired variables is two, population size is default value 50, and population fraction is also default value 0.35. After selecting appropriate objective functions, the desired PF is tested at different population size from 50 to 200. Fig. 6, Fig. 7, and Fig. 8 show the results with different population sizes. It shows that the PF cannot guarantee minimization of two objectives at large dense in population size.
The performance tests in Fig. 9, Fig. 10 and Fig. 11 illustrated with different population fraction of objective 1 and objective 2. Range of population fraction can be tested from 0 to 1. From these results, no additional parameters are required for Pareto converging using Genetic algorithm such as different sizes of population. Fig. 12 and Fig. 13 demonstrated characteristics of desired PF when using multiobjective optimization with genetic algorithm. These figures show the ranking of genes and a set of solutions span the entire Pareto optimal solution.
Figure 4. PF of Rastrigin’s Function and Defined Function
Figure 5. PF of De Jong’s Function 2 and Defined Function
Figure 6. Desired PF with Population Size-100
Figure 7. Desired PF with Population Size-150
Objective 1 Objective 2
dominated Non-dominated
Figure 8. Desired PF with Population Size-200
Figure 9. Desired PF with Population Fraction-0.5
Figure 10. Desired PF with Population Fraction-0.75
Figure 11. Desired PF with Population Fraction-0.95
Figure 12. Desired PF and Rank based on Pareto Dominance
Figure 13. Pareto Distance and Spreading of Desired PF
5) CONCLUSION
Based on reasons of maximum coverage and maximum energy efficiency in node deployment of WSN, multiojective optimization problem was considered in this paper. Maximizing coverage and minimizing overlap between each sensor node results large number of relay nodes for communication. Therefore, depletion of energy at these sensor nodes will be sooner and network lifetime will be shorter. Such conflicting of multiple objectives can be solved by using specific optimization algorithms or right choice of objective functions. Thus in this work, selecting appropriate objective functions are analysized by using genetic algorithm for multiobjective optimization problem. Analysis on optimization of two objectives in 2D network and illustrated results are confirmed by using Pareto optimal solutions and Pareto Front. Future research will be on implementing optimal node deployment with selected objective functions and specific algorithm in heterogeneous network.
REFERENCES
1) Z. Fei, B. Li, S. Yang, C. Xing, H. Chen, and L. Hanzo, “A survey of multi-objective optimization in wireless sensor networks: metrics, algorithms and open problems,” IEEE Communications Survey and Tutorials, September, 2016.
2) M. Michat, “A survey of multi-objective deployment in wireless sensor networks,” Journal of Telecommunications and Information Technology, March, 2010.
3) S. Mnasri, N. Nasri, T. Val, “The deployment in the wireless sensor networks: methodologies, recent works and applications,”
International Conference on Performance Evaluation and Modeling in Wired and Wireless Networks, Sousse, Tunisia, November, 2014.
4) I. Giagkiozis, R. C. Purshouse, and P. J. Fleming, “An overview of population-based algorithms for multi-objective optimization,” Internal Journal of System Science, vol. 46, issue. 9, 1572-1599, 2013.
5) C. Wang, E. Sun and F. Tian, “Optimal overage algorithm of wireless sensor networks based on particle swarm optimization with coherent velocity,” International Journal of Grid and Distributed Computing, vol. 9, no. 9, 293-306, 2016.
6) E. Zitzler. K. Deb, and L. Thiele, “Comparison of multiobjective
evolutionary algorithms: empirical results,” Technical Report, Institute of Technical Information and Communications, Zurich, Switzerland, December, 1999.
7) A. Messac, “Optimization in practice with Matlab for engineering
students and professionals,” Cambridge University Press, New York, USA, 2015.
Khin Kyu Kyu Win received her BE(Electronics) degree from Yangon Technological University, Yangon, Myanmar. She did postgraduate study for M.Eng (Research) at school of Electrical and Electronic Engineering, Nanyang Technological University, Singapore. Her PhD degree was received from Electronic Engineering Department, Yangon Technological University. Her research work is in the area of wireless communication engineering. She is currently a lecturer at Yangon Technological University and also a member of Myanmar Engineering Association.
Phyu Phyu Thant received her BE(Electronics) degree from Technological University (Thanlyin), Yangon, Myanmar. She is currently doing postgraduate research for her master degree at Electronic Engineering Department, Yangon Technological University. Her research work is concerned wireless sensor network. She is also an instructor at Technological University (Thanlyin).