Investigation into Swarm-based Cooperative Behaviour in
Execution of Open Field Agricultural Tasks
JANANI, Alireza
Available from Sheffield Hallam University Research Archive (SHURA) at:
http://shura.shu.ac.uk/24182/
This document is the author deposited version. You are advised to consult the publisher's version if you wish to cite from it.
Published version
JANANI, Alireza (2018). Investigation into Swarm-based Cooperative Behaviour in Execution of Open Field Agricultural Tasks. Doctoral, Sheffield Hallam University.
Copyright and re-use policy
See http://shura.shu.ac.uk/information.html
Sheffield Hallam University Research Archive
Investigation into Swarm-based Cooperative Behaviour in Execution of Open Field Agricultural Tasks
Alireza Janani
A doctoral project report submitted in partial fulfilment of the requirements of Sheffield Hallam University
for the degree of Doctor of Professional Studies Doctor of Philosophy
Sheffield Hallam Univeristy
Materials and Engineering Research Institute UK
Abstract
Because of the significant drop in the number of farmers and increase in the earth
population, the use of autonomous farming units including unmanned tractors is
be-coming more and more popular. However, relying on a single autonomous farming
unit to carry out the entire task on a large field is inefficient. Using multiple
au-tonomous tractors bring more efficiency, however, without cooperation this attempt
will fail (Mataric et al., 1995). This cooperation can be achieved by an appropriate
task allocation and coordination mechanism between the participating units. The
current trend in this field is to use direct forms of communication in any form of
directional or broadcasting meaningful messages among the group. The messages
assist the group to identify the state of the task, assigned workload, collision and
congestion avoidance, and etc. These forms of approaches are fast and efficient when
units are within the communicating signal range.
In this thesis, we aim to investigate the feasibility of cooperative execution of open
field farming task including spraying and ploughing while inter-team interaction
is other than direct communication methods. For every task, an algorithm is
sug-gested and an appropriate mathematical model is presented. Then, using ROS Stage
simulation environment, each algorithm is implemented and multiple tests are
con-ducted. Finally, the simulation results and the correspondent mathematical results
Candidate’s Statement
I declare that this work has been conducted in accordance with the regulations of
Sheffield Hallam University and is the author’s own work apart from where indicated
by specific reference to other sources. The work has not been submitted as part of
any other award or presented to any other institution.
Acknowledgement
I would like to, firstly, thank my wife who supported me through thick and thin in
this journey. I couldn’t complete this program without her support and patience.
My gratitude goes to my Director of Studies, Prof. Jacques Penders, for his
contin-ued invaluable support, advice and guidance and with whom my robotic life began.
I am also grateful to Dr Lyuba Alboul, my Doctoral supervisor, who challenged my
thinking and made me realise the importance of each small achievement. Both of
you have been inspirational and this journey would not have been possible without
you. Finally, I would like thank my sister and parents, who also supported me in
Contents
Contents . . . i
List of Figures . . . vi
List of Tables . . . ix
1 AGRICULTURE AND ROBOTICS: TRENDS AND CHALLENGES 1 1.1 Agriculture: Everlasting Tension . . . 1
1.2 Agriculture: Current Trends and Methods . . . 3
1.2.1 Mechanisation . . . 3
1.2.2 Precision Farming . . . 4
1.2.3 Multi Robot Approach . . . 5
1.3 Research Question, Aim and Objectives . . . 8
1.4 Thesis Contribution . . . 8
1.5 Thesis Layout . . . 10
1.6 Research Location . . . 11
2 LITERATURE REVIEW . . . 13
2.1 From Multi Agent System to Multi Robot System . . . 13
2.2 Multi Robot System . . . 14
2.3 Application Domain of Multi Robot System . . . 15
2.3.1 Foraging . . . 15
2.3.2 Area Coverage and Exploration . . . 15
2.3.3 Multi-Target Observation . . . 16
2.3.4 Object Transportation . . . 16
2.3.6 Soccer . . . 17
2.4 Team Characteristics . . . 17
2.4.1 Control Structure . . . 18
2.4.2 Differentiation . . . 21
2.4.3 Communication Structure . . . 23
2.4.4 Representative Architecture . . . 27
2.5 Main Questions in Multi Robot System . . . 29
2.5.1 Task Partitioning and Allocation . . . 30
2.5.2 Coordination . . . 32
2.5.3 Congestion Avoidance and Clearance . . . 34
2.6 Cooperative Farming: Review and Analysis . . . 36
2.6.1 Agricultural Tasks . . . 37
2.6.2 Analysis of the Related Works . . . 38
2.6.3 The Problem of Localisation in Agricultural Robotics . . . 42
2.7 Conclusion . . . 48
3 COOPERATIVE PLOUGHING: DESIGN AND IMPLEMEN-TATION . . . 49
3.1 Ploughing Analysis . . . 49
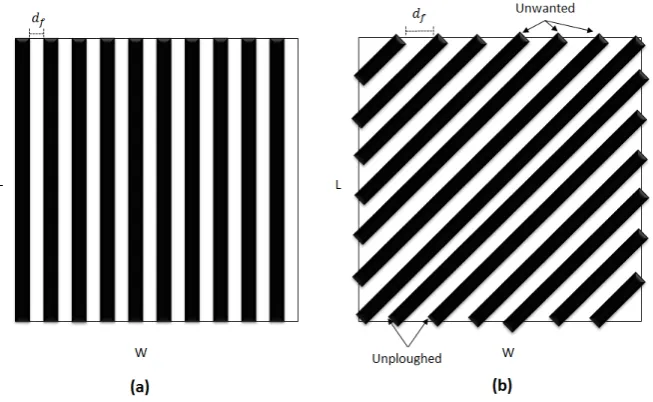
3.1.1 Ploughing Patterns . . . 50
3.1.2 Ploughing Restrictions . . . 52
3.1.3 Ploughing Mouldboards and Furrow Transitioning . . . 52
3.1.4 Ploughing Cost . . . 54
3.2 Design Requirements and Considerations . . . 56
3.3 Interaction Model . . . 58
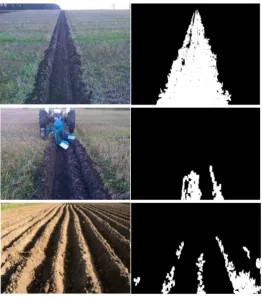
3.3.1 Furrow Detection . . . 58
3.3.2 Vision Based Furrow Detection . . . 60
3.3.3 Accuracy of the Vision Based Furrow Detection . . . 61
3.4 Points of Failure . . . 63
3.5 Congestion Clearance . . . 63
3.5.2 Proposed Solution to Spatial Resource Conflict . . . 64
3.5.3 Collision Avoidance . . . 67
3.6 Challenges in Obstacle Detection Implementation . . . 70
3.6.1 Differentiation between other team members and the rest of the obstacles in the environment . . . 70
3.6.2 Entering the Field due to Collision Avoidance . . . 78
3.6.3 Combination of Collision and Congestion Avoidance . . . 78
3.7 Team Ploughing . . . 79
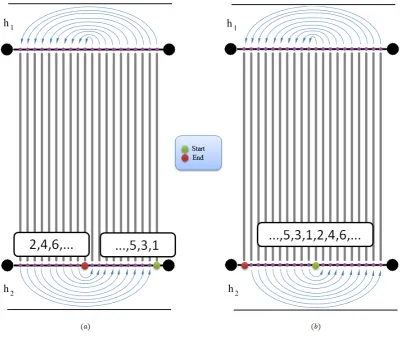
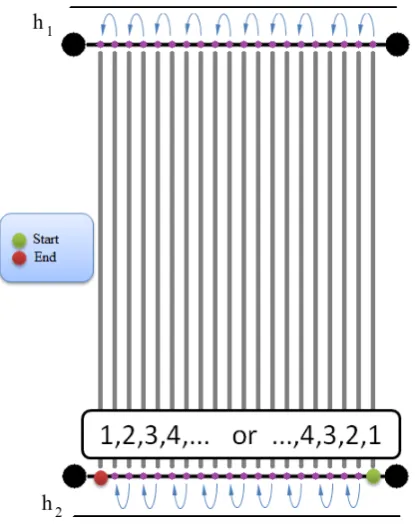
3.8 Furrow Transitioning . . . 80
3.8.1 Ploughing with a Reversible Mouldboard: First-In, First-Out . 81 3.8.2 Ploughing with a Reversible Mouldboard: Last-In, First-Out . 88 3.8.3 Comparison and Discussion . . . 94
3.9 Ploughing Optimisation . . . 99
3.9.1 Issues with FIFO and LIFO . . . 100
3.9.2 Toward Self-Organising Ploughing . . . 101
3.10 Conclusion . . . 106
4 COOPERATIVE SPRAYING: DESIGN AND IMPLEMENTA-TION . . . 107
4.1 Motivation Behind Further Investigation . . . 107
4.2 Spraying Analysis . . . 111
4.2.1 Single Robotic Sprayer . . . 112
4.3 Cooperative Spraying: Design Description . . . 115
4.3.1 Task Partitioning Analysis . . . 117
4.3.2 Task Allocation Analysis . . . 118
4.3.3 Task Initiation Analysis . . . 121
4.3.4 Spraying Time Analysis . . . 121
4.3.5 Design Limitations . . . 122
4.4 Implementation and Testing . . . 126
4.4.1 Mathematical Results . . . 126
4.5 System Optimisation . . . 132
4.5.1 Dynamic vs Static Checkpoints . . . 132
4.5.2 Optimum Team . . . 132
4.5.3 Large Team and Fewer Checkpoints . . . 133
4.6 Conclusion . . . 138
4.7 Critiques and Future Work . . . 140
5 Discussions, Conclusions and Future Works . . . 141
5.1 Research Recap . . . 141
5.2 Region-based vs Self-organised, FIFO, LIFO . . . 145
5.2.1 Execution Time Comparison . . . 146
5.2.2 Scalability, Flexibility and the Required Coordination . . . 147
5.2.3 Resilience Toward Failure . . . 149
5.3 Application Scope . . . 152
5.3.1 Seeding . . . 152
5.3.2 Harvesting . . . 153
5.3.3 Multi-Robotic De-mining and Mine Field Mapping . . . 157
5.3.4 Cooperative Beacon Distribution . . . 158
5.4 Conclusion and Future Directions of Research . . . 160
5.4.1 Recovering from Failure During Task Execution . . . 163
5.4.2 Hybrid Approaches . . . 163
References . . . 165
Appendix A Spraying Optimum Team Size . . . 190
Appendix B C++ Code for Artificial Potential Field Using ROS . 195 Appendix C C++ Code for Cluster Class . . . 200
Appendix D C++ Code for Cluster Finding . . . 202
Appendix G C++ Code for FIFO Task Handler . . . 218
Appendix H C++ Code for LIFO Task Handler . . . 228
Appendix I C++ Code for Self-organised Task Handler . . . 236
Appendix J C++ Code for Region-based Task Handler Using ROS 242
List of Figures
3.1 Ploughing in action . . . 50
3.2 Ploughing Patterns . . . 50
3.3 Furrow Transitioning in Action . . . 51
3.4 Ploughing Mouldboards . . . 53
3.5 Ploughing Patterns Using Conventional Mouldboards . . . 54
3.6 Ploughing Patterns Using Reversible Mouldboards . . . 55
3.7 Furrow Detection Results . . . 61
3.8 Congestion Demonstration . . . 65
3.9 Congestion From Different Direction . . . 65
3.10 Division of Field of View . . . 66
3.11 Artificial Potential Field(APF) Demonstration . . . 68
3.12 Demonstration of Local Minima Issue in APF . . . 69
3.13 QR-code Tracking . . . 73
3.14 Flickering Pixel Effect . . . 75
3.15 RGB-LED Feature Localisation . . . 76
3.16 RGB-LED Feature Based Localisation Camera View . . . 77
3.17 RGB-LED Feature Based Localisation Noise Removal . . . 77
3.18 Field View for Combining Collision and Congestion Avoidance . . . . 79
3.19 Ideal Position of the Robot for Ploughing . . . 81
3.20 FIFO Furrow Transitioning Demonstration . . . 83
3.21 Ploughing with a Reversible Mouldboard FIFO - Flow Chart . . . 87
3.22 LIFO Furrow Transitioning Demonstration . . . 91
3.23 Ploughing with a Reversible Mouldboard LIFO - Flow Chart . . . 93
3.25 FIFO vs LIFO Processing Time Comparison . . . 96
3.26 FIFO vs LIFO Travelled Distance Comparison . . . 97
3.27 Software System Diagram for Ploughing . . . 98
3.28 FIFO and LIFO Difference between Simulation and Mathematical Results . . . 99
3.29 The Self-Organised Approach Demonstration . . . 102
3.30 Furrow Transitioning in the Self-Organised approach . . . 102
3.31 Self-organised ploughing flowchart . . . 104
3.32 Self-Organised Ploughing Required Travelling Distance . . . 105
3.33 Time Analysis of Ploughing Methods . . . 105
4.1 Shortcoming of Ploughing Interaction Method in Spraying . . . 108
4.2 Excessive Spraying Demonstration . . . 109
4.3 Shortcoming of Static Task Allocation in Spraying . . . 110
4.4 Spraying in Action . . . 112
4.5 Irrigation Robot . . . 113
4.6 Hortibot Robot . . . 114
4.7 Spraying Task Allocation Demonstration . . . 116
4.8 Spraying Task Initiation Demonstration . . . 117
4.9 Spraying Time Analysis . . . 119
4.10 Spraying Time Analysis Checkpoint Occupation . . . 120
4.11 Spraying Task Allocation Breaking Point Demonstration . . . 123
4.12 Spraying Successful Task Initiation Condition Demonstration . . . 124
4.13 Spraying Task Allocation Failure Demonstration . . . 124
4.14 Detection Range Issue with Spraying Approach . . . 125
4.15 Team Size for Different Field Size . . . 127
4.16 Spraying Time Comparison . . . 128
4.17 Spraying Software Diagram . . . 129
4.18 Region-based Task Handler Flowchart . . . 130
4.19 Region-based Simulation vs Mathematical Results Comparison . . . . 131
4.21 Spraying Task Initiation with Patrol Robot . . . 135
4.22 Patrol Robot Excessive Execution Prevention . . . 136
4.23 The Effect of Patrol Robot on the Rest of the Team . . . 136
4.24 Spraying Task Completion . . . 137
5.1 Execution Time Comparison for Different Team Sizes . . . 147
5.2 Seeding Patterns . . . 153
5.3 Harvesting Carrot . . . 154
5.4 Different Harvesting Machines . . . 154
5.5 Single Harvester in the Region-based Approach . . . 156
5.6 Single Harvester in Self-organising Approach . . . 156
List of Tables
3.1 Variation in tag position and observer position vs Distance to the tag 74
CHAPTER 1
AGRICULTURE AND ROBOTICS: TRENDS AND
CHALLENGES
This chapter presents the research motivation and background, and the research aim and objectives. The main aim of this chapter is to assure that the reader comprehends the urge for human inde-pendent approaches to perform agricultural tasks. A global and epidemic issue in agriculture which jeopardizes the future of food industry is discussed in 1.1. The current trends aiming to compen-sate the raised issue are presented in 1.2. The direction of research and aim and objectives of the research are listed 1.3. Finally, the thesis layout is explained in 1.5
1.1
Agriculture: Everlasting Tension
Agriculture is defined as domestication of animals and plants. There are various
tasks to consider in the field of agriculature. Chandrasekaran et al. (in 2010)
classi-fied agricultural branches into various categories including, Crop Production
(deal-ing with production of various food crops), Horticulture (deal(deal-ing with production
of flowers, fruits, and vegetables), Forestry (dealing with large scale cultivation of
perennial trees for supplying wood), Animal Husbandry (dealing with maintenance
of various types of livestock for direct energy), Fishery Science, and Home Science.
The archaeological excavations date back agriculture to 10,000 years ago. Since then,
human beings have used agriculture mainly to provide food. However, nowadays
agricultural products are demanded by various industries including pharmaceutical,
As population increases, the demand for food increases too. Between 1960 and
2000 the population of the earth was doubled. In return, agricultural productivity
improved by 2.4% annually between 1969 and 1989, but this fell to only 2% between
1989 and 2000 (Fao, 2002). By 2050, it is estimated that the population of the earth
will reach 9.15 billion by which time the overall demand for agricultural products is
expected to grow at 1.1% per year (Alexandratos and Bruinsma, 2012). To satisfy
this level of demand, the agricultural productivity has to be improved by 25% of
the current rate (Fao, 2009).
This everlasting tension has always forced farmers to invent more efficient cultivation
methods. However, recent researches are suggesting that the future improvements
may not be easily achievable. The main reason is the shortage of input labour force.
In Japan, the number of farmers is decreasing, and every year more rice paddies are
abandoned, while the average age of the farmers is increasing (Noguchi and Barawid,
2011). In addition, studies reveal that the younger generations are not interested in
agricultural activities. According to Bloss (2014), 60% of the farmers in Japan are
over 65 years of age.
The shortage in input labour force is a global issue, and it is not limited to a
particular region. For instance, in United States of America, less than 1% of people
are engaged in agricultural activities (Bloss, 2014), and in Europe (EU-27), 24.9%
of agricultural labour dropped(Eurostat, 2015) since 2000.
The main reason is that agriculture is a labour intensive activity with mediocre to
low level income. In addition, traditional and conventional farming methods, for
example relying on seasonal rain for watering the crop, endangers the end products
(Golait, 2007). In this era where demand for food is continuously increasing, the
methods much more difficult.
1.2
Agriculture: Current Trends and Methods
Over the years, more efficient tools and techniques have been developed to improve
productivity of agricultural processes. However, the proposed methods require one
common parameter: Human Labour. In recent decades, various approaches have
been developed to minimise dependency to human input labour force. As a result,
two main trends have been identified: (I) Mechanisation and (II) Precision Farming
(Zhang et al., 2002).
1.2.1 Mechanisation
Mechanisation in agriculture refers to “the application of tools, implements, and
powered machineries as inputs to achieve agricultural production” (Clarke, 1997).
The main advantage of agricultural mechanisation is that the technology satisfies
the real need of the farmers while the prices are affordable (Houmy et al., 2013).
Generally, agricultural machineries can be powered from three sources of energy:
manpower (or manual), animal, and motorised (using fossil fuel or electric power).
A manpower source produces 0.1 Hp (Horsepower) over a limited period. However
by harnessing power of animals, the productivity increases by 6 to 7 fold per animal.
By invention of combustion engine, the productivity was increased even more, up
to 10 fold. Today, agricultural tractors boost this efficiency up to 450 kW (612 Hp)
or more (Shearer and Pitla, 2013). But, even with the introduction of tractors still
a human is required for operation. A human has to drive the machineries through
a large field for various purposes during cultivation period.
larger portions of the field at a time. This requires the machines to become larger
and heavier, and this will lead to occurrence of soil compaction.
Soil compaction occurs whenever an external stress or pressure exceeds the internal
soil strength, also known as pre-compression stress value (Horna et al., 1995). Soils
level of stress depends on the soil type, the climate, and varies from one location
to another. Soil compaction results in reduction of soil pore volume which causes
reduction in space for air and water in the soil, and consequently reduction in soil
water infiltration (Graves et al., 2015). As a result, less rainwater can penetrate
into the compacted soil which either increases the potential of erosion and runoff,
or may cause the water to remain on the soil surface for longer period of time,
especially in wheel tracks (Wolkowski and Lowery, 2008). Other impacts of soil
compaction are limited root growth, reduction in nutrient uptake by roots, and
re-duction in micro-organism and earthworm activity (Graves et al., 2015). Recovering
from soil compaction is time consuming, and it increases the cost of cultivation by
90% (Blackmore, 2012).
1.2.2 Precision Farming
Even though by mechanisation the productivity is boosted significantly, the need
for a human as an operator constrains further progress. However in recent decades,
progress in search for human independent approaches has led to invention of
au-tonomous unmanned robotic vehicles.
The search for autonomous robots in agriculture started in 1920 when furrows
were used to guide tractors across the fields with reduced effort from the operator
(Mousazadeh, 2013), (Shearer et al., 2010). However the concept of fully autonomous
agricul-tural vehicles navigated throughout the field using leader cable guidance (Ming
et al., 2009). Today, autonomous agricultural robots are applied for various tasks.
Grift et al. (2008) classified advancement in agricultural robotics into four main
ar-eas: (1) Plant Oriented Robotics, (2) Animal Robotics, (3) Controlled Environment
Robotics, and (4) Field Robotics. Significant advances have been made in recent
decades in each of these application areas.
Even though robotic systems are slow in speed, they can operate consistently with
high precision for a long period of time in different weather conditions while reducing
the labour cost. In fact, autonomous dedicated farming units increase efficiency and
yield (Sukkarieh, 2012). This has convinced many countries to invest in autonomous
agricultural approaches (Tarannum et al., 2015). For instance in 2014, the Japanese
government announced plans to fund the development of unmanned farm tractors
(Bloss, 2014).
Although unmanned autonomous robotic approaches have succeeded at reducing
the labour force, they still require human observation for maintenance and failure
recovery (Noguchi and Barawid, 2011). Moreover, the current autonomous tractors
are costly, and only a narrow margin of farmers can afford them.
1.2.3 Multi Robot Approach
The idea of true human independent farming (not even as a supervisory role) led
to the invention of a new approach: multi robot system. Multi robot system is a
well-known topic in the robotics community in which a team of low-cost robots is
deployed into the field to cooperatively execute the given task.
Multi robotic approaches have several potential advantages over single robotic
cost of the system can be reduced (Jones and Mataric, 2005). In addition, a team
of robots can increase system flexibility and robustness by taking advantage of
in-herent parallelism and redundancy (Liu and Wu, 2001). Furthermore, multi robotic
approaches have better system reliability and scalability (Yan et al., 2013). Finally,
they have the potential to become completely human independent (Noguchi and
Barawid, 2011).
However, the main drawback of this approach is system complexity. Deploying
mul-tiple robotic units, which do not interact with each other, in a field to execute the
same task is insufficient, and often it results in complete failure (Jones and Mataric,
2005). The key parameter to an effective and successful team of robots is
coop-eration. Cooperation emerges from individual cooperative behaviour. Cooperative
behaviour of robots has to be planned and designed accurately so that unwanted
competition among robots is prevented (Jones and Mataric, 2005).
In order to have a cooperative team of robots, first characteristics of the team have
to be identified. These characteristics define robots’ limitations and capabilities,
and sometimes are referred to as group architecture (Uny Cao et al., 1997). These
characteristics are as follows:
• Communication or Interaction Structure: explicit vs implicit.
• Control Structure: centralised vs decentralised.
• Differentiation: homogeneous vs heterogeneous.
Next, three main questions have to be answered:
1. How to divide the complex global task into smaller manageable subtasks (i.e.
2. How to distribute and assign each subtask to each participating robot (i.e. task
allocation)?
3. How robots can attend their assigned task in a shared environment without any
collision and congestion (i.e. coordination)?
Consequently, by answering these three questions, cooperation could emerge from
a team of robots. The emerged cooperation can be scaled and quantified with
the following parameters: scalability, robustness, self-organisation, andcoordination
strength (Barca and Sekercioglu, 2013), (Farinelli et al., 2004). These terminologies
will be discussed in more details in Chapter 2.
The current trend in multi robotic approaches in the field of agriculture is to achieve
cooperation through a dedicated coordinator via explicit forms of interaction. In
ex-plicit forms of interaction, each robot deliberately broadcasts its intentions to other
members or an individual in the team. These messages could be transmitted via
Wi-Fi, Bluetooth, or via any other types of signalling including blinking LED,
ul-trasounds, vibration, and etc (Uny Cao et al., 1997). With explicit forms of
interac-tion, “robots’ behaviours can be planned according to a complete prior knowledge”
Barca and Sekercioglu (2013). However, these approaches are susceptible to the loss
of communicating signal while the computational cost increases with the increase
in the number of participating robots. In addition, they have limited scalability,
robustness, and self-organisation (Parker, 1993) (Lumelsky and Harinarayan, 1997).
However, in implicit forms of interaction, robots intentions are observed and
inter-preted either by changes in the environment created as a result of robots movement
or task execution or local interaction among robots (Uny Cao et al., 1997). This
form of interaction is unintentional, and hence it is referred to as indirect form of
system can become scalable, robust, and highly self-organised. Besides, the loss of
communicating signal can no longer affect the success of the team.
1.3
Research Question, Aim and Objectives
To this date, there have been no approaches in the field of agriculture in which
coop-eration is achieved through implicit forms of interaction. This research is conducted
to investigatethe feasibility of cooperation via implicit forms of interaction
in a large team of robots for various agricultural tasks which are executed
in an open field.
The main aim of this research isto develop cooperative behaviour mechanism
by which a team of robots can execute an agricultural task (e.g.
plough-ing, sprayplough-ing, and harvesting) in a large environment without the use of
explicit forms of communication or central organiser.
To obtain this aim, the following objectives have been foreseen:
• Description of the team architecture and the cooperative model.
• Review and analysis of related works.
• Analysis of the targeted tasks.
• Description and modelling of cooperative approaches.
• Simulation of the proposed approaches.
• Implementation and Validation of the designed approaches.
1.4
Thesis Contribution
To this point, there have been no attempt in open field farming in which a
coopera-tive behaviour emerges in a team of robots as a result of implicit interaction. All of
the related works in the application of open field farming have been accomplished
using explicit forms of communication. In this thesis, the proposed approaches are
based on implicit forms of communication. In other words, robots do not transmit
their intentions intentionally using explicit forms of interaction.
Spatial Congestion Clearance Using Implicit Form of Interaction In
gen-eral, when operating in a shared environment, robots may aim to navigate to a
shared coordinate in space. In this situation, congestion is inevitable. Normally, a
central unit coordinates the robots to prevent congestion. Alternatively, a
conges-tion is resolved between two robots using some form of signalling. Both approaches
require explicit form of interaction. In this thesis, an approach is suggested that
1.5
Thesis Layout
The layout of this thesis are as follows:
Chapter 1: This chapter presents the research motivation and background, and
the research aim and objectives. The main aim of this chapter is to assure
that the reader comprehends the urge for human independent approaches to
perform agricultural tasks. In the first section, a global and epidemic issue in
agriculture which jeopardizes the future of food industry is discussed. Next,
current trends aiming to compensate the raised issue are presented. Finally,
the direction of research and aim and objectives of the research are listed.
Chapter 2: In this chapter, the terminology introduced previously are discussed.
Next, with the defined terminology, the architecture of the team which is
considered in this thesis is introduced. Finally, similar works are described
and analysed.
Chapter 3: In this chapter, ploughing with a team of robots is discussed. First,
the task of ploughing is analysed to determine the design considerations and
requirements. Next, the recognised problems are addressed, and two
coopera-tion models are presented. Further, the results obtained from analysing these
models are presented, compared, and criticised. Finally, to improve the system
and compensate the identified drawbacks, an optimised method is presented,
analysed, and compared with the previous cooperation models.
Chapter 4: In this chapter, spraying with a team of robots is discussed. This
includes analysis and identification of design consideration and requirements
cooper-ative model, implementation and discussion regarding the obtained simulation
results.
Chapter 5: This chapter presents conclusions and discussions over the obtained
results. Moreover, it aimed to identify the future research axis to this research.
1.6
Research Location
The research is carried out in Sheffield Hallam University, Materials and Engineering
Research Institute (MERI), Centre for Automation and Robotics Research (CARR).
Numerous robotic researches have been conducted in this centre in variety of robotic
fields from human robotic interaction to multi robotic systems and swarm robotics.
The related projects in multi robotics and swarm robotics include GUARDIAN
(Guardian, 2010) and I-SWARM (ISwarm, 2006). In the GUARDIAN project, a
team of robots provide vital environmental information (including obstacles,
partic-ular toxic gas level, and etc) to a fire fighter who is surrounded by the team through
the modified oxygen mask. On the other hand, the aim of I-SWARM is the
real-isation of collective intelligence of swarm of microrobots, in terms of cooperation
and collective perception using knowledge and methods of pre-rational intelligence,
machine learning, swarm theory and classical multi-agent systems (ISwarm, 2006).
In addition to swarm related projects, the research centre hosts projects from other
areas in the field of robotics. In human robot interaction area, CARR hosts
En-gineering and Physical Sciences Research Council (EPSRC) funded project called
REINS (REINS, 2011). In REINS, the focus is to develop a semi-autonomous
mo-bile robot with sensory capabilities that transfer environmental information to the
attached fire fighter via haptic and tactile interaction methods in a smoked filled
The supervisory team, Prof Jacques Penders and Dr. Lyuba Alboul, were involved
in the mentioned projects along with other related research projects which are not
CHAPTER 2
LITERATURE REVIEW
The main aim of this chapter is to demonstrate that the current approaches in the agricultural robotics are not reliable and sufficient for future development and expansion. The relevant definitions in multi robot system are discussed in 2.1 and 2.2. The application domain in multi robot system is reviewed in 2.3. Multi-robotic team characteristics are reviewed in 2.4 and design questions in any multi-robotic team is mentioned in 2.5. Finally, the previous contributions in multi-robotic farming is reviewed in 2.6.
2.1
From Multi Agent System to Multi Robot System
The modern approach to artificial intelligence is centred around the concept of
au-tonomous agents (Vlassis, 2003). According to Wooldridge and Jennings (1995), an
entity can be counted as an agent if it has the following properties:autonomy: to
make decisions without the direct intervention of others, reactivity: to perceive
the surrounding environment (e.g. the physical world or a graphical user interface)
and to provide appropriate response. pro-activeness: to exhibit goal-directed
be-haviours by taking the initiative. social abilities: to interact with other entities
via some kind of agent-communication language. Inter-agent communication has
utmost importance in multi agent systems in which multiple autonomous agents
aim to solve a problem cooperatively.
The concept of an agent in computer science, generally is applied to software as it
act upon that environment through actuators in a goal-directed behaviour while
they can communicate with other robots in the environment (Russell and Norvig,
2003). Therefore, the existing concepts and solutions in agent-based systems can be
applied (if applicable) to robotic-based and multi robotic-based problems.
2.2
Multi Robot System
In the past decades, single robot systems have been applied to numerous application
domains. As tasks become more and more complex, the robotic units are designed
more complex to fit the given task. However, there are tasks which a single robot,
regardless of how sophisticated the robot design is, is either incapable to carry out
successfully or it requires a long time to complete the process. Consider a search and
rescue scenario in which a robot is given a map of the environment and it is required
to search for injured human beings and to act appropriately upon detection. Clearly,
time is an important asset in this example, and it is preferred to perform the task
as fast as possible. If a single robotic unit is deployed, despite how fast it performs
at every single point on the map, the maximum efficiency cannot be reached. In
addition, the success of the task is susceptible to the loss of the single robot. In
other words, if the robot fails in the middle of the operation, the task cannot be
completed and the robot has to be recovered.
These weaknesses of single robotic units have led to the deployment of multiple
robots. In this approach, a group of robots functions together to complete a shared
goal. The key to success of the given task is the presence of some form of cooperation
among the individuals in the group. In other words, it is not possible to achieve
2.3
Application Domain of Multi Robot System
The concept of multi robot systems is being applied to various new tasks every year.
In this section, we provide a brief overview of the current application domains for
multi robot systems.
2.3.1 Foraging
In foraging, the aim is to pick up and gather objects which are scattered in the
environment (Farinelli et al., 2004). This application domain is inspired by the
behaviour of ants that search for food sources distributed around their nest Sahin
et al. (2008). The main challenge in this domain is to implement an optimised
search strategy to maximise the ratio of the returned food. There are various tasks
which require foraging including search and rescue (Beck et al., 2016), toxic waste
cleaning, mine cleaning, and service robots (e.g. (Jung and Zelinsky, 2000);(Jeon
et al., 2016)).
2.3.2 Area Coverage and Exploration
Similarly to foraging, in area coverage, the aim is to visit or analyse all the free
points in space as efficiently as possible (Choset, 2001). Various tasks including
demining (Santana et al., 2005), snow ploughing (Saska et al., 2013), line searching
(Marjovi et al., 2010), open field processing (Noguchi et al., 2004); (Batalin and
Sukhatme, 2002), beacon distributing (Howard et al., 2002), lawn mowing (Zheng
et al., 2005), and car-body painting (Graca et al., 2016) are categorised in area
coverage application domain.
In a slightly different area of application, robots are aimed to explore and analyse
difference between exploration and area coverage application domains is that in area
coverage the map of the environment may or may not be given to the robots prior
to execution, whereas in area exploration the field is completely unknown to the
robots. Therefore, the main issue in area exploration is to generate a global map of
the environment cooperatively and use the map for further navigation or processing
(e.g. (Simmons et al., 2000); (Thrun and Liu, 2005); (Koch et al., 2015)).
2.3.3 Multi-Target Observation
In multi-target observation, also known as CMOMMT: Cooperative Multi-robot
Observation of Multiple Moving Targets (Farinelli et al., 2004), first introduced by
Parker (1999), a team of robots are required to detect and track a group of moving
targets cooperatively. Multi-Robot Target Observation has many connections with
security, surveillance and recognition problems (Werger and Mataric, 2000) where
targets moving around in a bounded area must be observed.
2.3.4 Object Transportation
In this application domain, robots are required to transport objects from point A
to point B. Depending on the size of the objects and capabilities of the robots, the
approaches could further be classified into (i) cooperative pulling/pushing and (ii)
individual object transportation. In cooperative pulling/pushing, individuals are
incapable to transport an object from A to B. Instead, they cooperatively push or
pull (sometimes the combination of both) the object (e.g. (Mataric et al., 1995);(Jose
and Pratihar, 2016);(Weber et al., 2015);(Vig and Adams, 2006);(Yamada and Saito,
1999)). In object transportation, however, the robots are capable to pick up and
carry an object from one location and deliver it to another location individually (e.g.
2.3.5 Flocking
In the flocking task, the goal is to navigate together while particular formation is
maintained in the team. This application domain is inspired by formation control
of a flock of flying birds. Cooperation among the individuals is also used to localise
each other, and to fuse information acquired from the environment. Similar to
exploration, map building of unknown environments is a common task tackled in
this application domain, though the difference is that in exploration, there may or
may not be a particular formation among the team. The problem of exploration
and flocking is related to several applications such as transshipment operations in
harbours, airports and marshalling yards (Arbanas et al., 2016), motion coordination
in industrial applications and exploration of dangerous environments (Solovey et al.,
2015).
2.3.6 Soccer
In recent decades, robotic soccer has become an interesting test bed for research
in cooperative multi agent and multi robot system (Kitano et al., 1997). This is
because the environment in which the robots operate is dynamic, and hostile by
which coordination becomes extremely challenging (Farinelli et al., 2004).
2.4
Team Characteristics
Before proposing any design or approach, the characteristics of the team have to be
identified. These characteristics determine the individual and the team level control
structure, strategies or steps to distribute the subtasks and to allocate the required
2.4.1 Control Structure
The most fundamental decision that has to be made in defining characteristics of a
multi robotic team is how individuals in the team perform decision making. Decision
making is referred to as a “cognitive process resulting in the selection of a course
of action among several alternative scenarios” (Yan et al., 2013). In a multi robot
system, decision making is carried out incentralised ordecentralised manner.
Centralised: In a centralised team of robots, there must be at least one robot
or computer which has a complete global information of the environment, other
robots, and the state of the task. This centralised unit is needed to perform task
allocation and coordination among the participating robots in the team (Barca and
Sekercioglu, 2013).
The centralised approach has been studied extensively in various fields of
applica-tion. Tang and Parker (2005) developed a centralised based system by which a
collection of heterogeneous robots reorganise into subteams as needed depending
upon the requirements of the application tasks and the sensory, perceptual, and
effector resources available to the robots. Tang and Parker then applied the system
to the task of box pushing and object transportation. The reason that robots have
to form particular formation at the beginning of the task is that not all robots in the
team have localisation system. The formation will assist the robots without
locali-sation to navigate. Khan et al. (2016) proposed a centralised system for formation
control of nonholonomic mobile robots for obstacle avoidance in a cluttered
envi-ronment. Khan et al. tackled the problem by using “proportional-integral average
consensus estimators”, whereby information from each robot diffuses through the
control for multi robot exploration application. In this approach, robots connect to
the base station only when making new observations so the communication is
per-formed more effectively. In exploration in known environment application, Yan et al.
(2010) developed an online sampling-based graph, by which the optimal path is
cal-culated for the robots. Wurm et al. (2008) proposes a coordination mechanism
for a team of exploring robots using segmentation of the environment to determine
exploration targets for the individual robots. The central unit assigns each robot to
a separate segment, thus a balanced distribution of the robots over the environment
is achieved. Yan et al. (2012) developed an empirical-based heuristic planning
strat-egy for the goods transportation by multiple robots. In here, the focus is to plan the
transportation task for each robot by estimating the production rate of goods based
on multi-robot coordination. The centralised approach is also used for multi robot
path planning. Luna and Bekris (2011) present an efficient and complete approach
for multi-robot path planning problems using graph-theory. In there, the central
unit performs the calculations and assigns the paths to each robot.
Decentralized A decentralized architecture is categorized as either distributed or
hierarchical (Uny Cao et al., 1997). In a distributed approach, there is no central
agent to perform decision making, and individuals are equal from the control the
point of view, and each participating individual performs decision making completely
autonomously. In a hierarchical architecture, robots are divided into smaller groups,
and decision making in each group is carried out by local decision makers (Uny Cao
et al., 1997). Yan et al. (2013) refers to this approach as hybrid since it has
properties of both the centralised and decentralised approaches.
Decentralised systems are applied in various multi robot applications. In search
of homogeneous robots by which a fire-fighter is guided through a smoked field
environment. In this example, robots always maintain their distance toward the
fire-fighter and each other. All the decision making is carried out individually and robots
utilise only the information collected by their sensors. In area coverage application
domain, Ranjbar-Sahraei et al. (2012) presents an intelligent approach by which
a team of robots covers an area cooperatively. In this example, robots mark their
territory by dispensing pheromone-like materials at the border of the claimed area.
Upon detection of another robots’ pheromone, they perform simple navigational
movement (e.g. turn left/right). In formation control application domain,
Lopez-Gonzalez et al. (2016) proposes a formation scheme, based on Lyapunov techniques,
if the orientation and distance information for each robot is available locally.
Discussion Although, with a centralised system, an optimal plan based on the
global knowledge can be planned, the efficiency drops significantly as the size of the
team increases. Besides, it is not robust in relation to dynamic environments or
failure in communications and other uncertainties (Yan et al., 2013). Moreover, a
centralised architecture is a leader dependent approach which means with failure of
the central unit the system will be incapable of operating (Parker, 1993).
On the other hand, using a decentralized system carries advantages including the
decrease in delay and impracticalities associated with centralized processing,
inde-pendence of computational complexity and size of the team, increase of robustness
toward the loss of the leader, and efficient use of parallelism. The only drawback
of a decentralized architecture is limited awareness of individuals about the global
2.4.2 Differentiation
It is important to decide whether the individuals in a team of robots have the same
capabilities or not since this will greatly affect how the underlying control schemes
will operate (Barca and Sekercioglu, 2013).
A team of robots could be either homogeneous or heterogeneous. In a homogeneous
team, individuals are identical meaning that they have the same hardware and
control software (Uny Cao et al., 1997). Various examples involving homogeneous
team of robots are in cooperative path planning (Habibi et al., 2016), cooperative
localisation (Tsai et al., 2015), search and rescue (Balta et al., 2015); (Couceiro,
2015), cooperative exploration in an unknown environment (Wang and Olson, 2016),
and target tracking (Zheng and Tan, 2015); (Senanayake et al., 2016).
In a heterogeneous team of robots, individuals have different designs and
functional-ities which compliment each other Barca and Sekercioglu (2013). Like homogeneous
teams of robots, heterogeneous teams of robots have been deployed in various
ar-eas of application including topological map-building (Ramaithitima et al., 2016),
search and rescue (Beck et al., 2016);(Gunn and Anderson, 2015), cooperative area
coverage (Pierson and Schwager, 2016), formation control (Sen et al., 2016),
cooper-ative exploration in an unknown environment (Dai et al., 2016), foraging (Castello
et al., 2016); (Prorok et al., 2016),and target tracking (Robin and Lacroix, 2016).
It is important to note that heterogeneity introduces more complexity to the system
due to (1) highly complex task allocation and (2) more dependency on modelling
other robots in the team (Uny Cao et al., 1997). Individuals in a heterogeneous team
of robots have different capabilities. To quantify this, a concept calledtask coverage
is introduced. Task coverage (in individual level) measures “the ability of an agent or
coverage determines the level of cooperation in the team. When the task coverage
is high, task can be accomplished without cooperation, but otherwise, cooperation
is necessary. In the homogeneous teams of robots, the task coverage is maximal
and decreases as the group becomes more heterogeneous. Unlike homogeneous, in
the heterogeneous team of robots task coverage is determined based on individual
capabilities hence more parameters should be considered in the calculation of task
coverage (Uny Cao et al., 1997).
One common trend for task allocation in a homogeneous team of robots is through
role assignment which will be allocated either at design-time or arises dynamically
in real-time (Uny Cao et al., 1997). Numerous researches have been conducted
in this field and different task allocation and role assignment algorithms and
tech-niques have been developed for homogeneous teams of robots including Contract Net
Protocol (Smith, 1980), Dynamic token generation (Cottefoglie et al., 2004), Game
theoretic approach (Arslan et al., 2007), etc. There are also approaches which
do not rely based on any well-known algorithm. Mendoza et al. (2016) applied
role assignment-based task allocation to a homogeneous team of robots deployed in
ROBOCUP 2015 soccer competition. In this particular example, robots task, which
is covering particular zone in the field, is carried out by a dynamic zone selection
algorithm in which robots select specific zones in the field according to the flow of
the game.
But is it possible for a team of homogeneous robots to turn into a heterogeneous
one? In theory, a homogeneous team of robots is a team in which individuals are
identical in terms of software and hardware. However, in various scenarios in which
robots have learning and self-designing algorithms (e.g. (Li et al., 2002), Luke et al.
suggested definition, a homogeneous team becomes heterogeneous. In this scenario,
the task allocation could be carried out in both ways depending on the application.
2.4.3 Communication Structure
Another important characteristic in any team of robots is how the team share their
knowledge about the task and the environment. This is referred to as communication
structure or interaction structure. Over the past decades, various classifications
are proposed. Uny Cao et al. (1997) classified multi robot communication into
three categories: (i)interaction via environment, (ii) interaction via sensing, and
(iii) interaction via communication.
Later, a more abstract classification was used to describe interaction models. In
this classification, interactions are either implicit, which encompasses interaction
through sensing other robots and through the shared environment, orexplicit, which
encompasses interaction through communication, (Yan et al., 2013).
Interaction via environment In this approach, robots utilise the available hints
in the shared environment created by other robots as a result of their execution to
extract necessary information. This form of interaction is inspired by the complex
nest building behaviours in ants and termites first described by Grass´e (1959).
More-over, since the information is perceived and not intentionally transmitted, this form
of interaction is categorised as an indirect form of interaction.
This form of interaction is extremely popular in the multi robotic and swarm
com-munity, and there are several examples in which cooperation among robots is merged
as a result of their indirect interaction. Parker et al. (2003) presents a robust
al-gorithm for collective robotic construction. In here, the robots, which are equipped
of any rubbles with an algorithm called blind bulldozing. In this three state finite
state machine algorithm, the robots wander around the field and plough the existing
rubbles into the field borders. When the material that the robot is pushing exerts
a force which is beyond certain threshold, the robot reorient its heading and
con-tinues as before. The similar reorientation occurs if the robot collides with another
robot. Willmann et al. (2012) presents another scalable and robust cooperative
team using only indirect form of communication. In this example, the autonomous
flying vehicles are given the blueprint of the structure and the location where they
can pick the building materials. In this sequential construction, robots place the
building materials right next to the last placed building block. In this way, robots
interaction is through the constructed building.
In (Ranjbar-Sahraei et al., 2012), a team of robots mark their territory by dispensing
particular pheromone. Upon detection marks of another robot, the robot deviates
its path. In this way, robots can cover the entire area cooperatively. Zedadra
et al. (2016) demonstrates a multi agent foraging algorithm named Cooperative
Switching Algorithm for Foraging (C-SAF) inspired from the classical ant system.
In this approach, robots, while searching for food, mark their trail by dispensing
detectable forms of pheromones. In the meantime, “robots create simultaneously
and synchronously a pheromone wave front expansion from the nest to the food and
can use the negative gradient to go back to nest”(Zedadra et al., 2016).
Interaction via sensing In an alternative approach, the necessary information is
perceived by sensing other robots in the team. This approach is inspired by
forma-tion control in flocking birds described by Reynolds (1987). This form of interacforma-tion
is also classified as an indirect form of interaction since there is no intention in
to differentiate and recognise other robots from other objects in the environment
which demands a modelling. The main application is those that require some form
of formation control for example cooperative guidance of a firefighter in smoke filled
environment (Saez-Pons et al., 2010). Saez-Pons et al. presents a cooperative team
of robots that surrounds the firefighter and provide environmental information back
to the firefighter. In this approach, robots aim to maintain their formation while
navigating using the attached range sensors. In (Saska et al., 2013), the robots,
which are performing snow ploughing the roads at the airport, monitor each others’
behaviour and trail with the attached range sensor to adjust their trajectory.
Interaction via communication In this approach, robots transmit their
inten-tions directly to another robot or broadcast via explicit forms of communication
including RF messages (e.g. Bluetooth, Wi-Fi), visual signals (e.g. blinking LED,
RGB LEDs), and other methods including ultrasound messages (Uny Cao et al.,
1997). This often requires a dedicated onboard communication module (Yan et al.,
2013). An interesting taxonomy based on communication presented by Dudek et al.
(1996) classifies multi robotic teams according to their communication range,
com-munication topology, and comcom-munication bandwidth. Since conveying information
is intentional, this form of interaction is referred to as a direct form of interaction.
Extensive works have been carried out in this form of interaction in various
ap-plication domains. Simmons et al. (2000) demonstrates how a team of robots can
cooperatively create a global map of the environment. In this example, the mapping
problem is decomposed in a modular, hierarchical fashion: Each robot maintains its
own local map. A central module receives the local maps and combines them into
a single, global map. Rao et al. (2016) presents an algorithm for cooperative
than a central module. In this approach, Utility Based Return (UBR) is used to
perform collaborative exploration. All vehicles start moving from a unique base
sta-tion and spread out by performing frontier-based explorasta-tion. Frontiers are selected
based on a utility value which is a trade-off between the expected information gain
at the frontier and the cost to get to it. The vehicles in the vicinity of each other
assign these frontiers among themselves based on the utility value so as to maximise
the total utility of the exploration. The vehicles sense obstacles and map the area
according to the obstacles found, while detecting new frontiers to decide where to
move. When in range with other vehicles, the exploration decision is collaborative
and each vehicle chooses a different frontier to explore in order to avoid more than
one vehicle exploring the same area.
Discussion Although with explicit forms of communication high level of
accu-racy can be achieved, the overall computational cost of the system increases as the
number of participating robots increases. With implicit forms of communication,
although perception and interpretation of information are more complex, the
sta-bility, flexista-bility, and fault tolerance of the system are better than with explicit
forms of communication. However, various researches suggest that systems in which
interaction is carried out by the combination of both implicit and explicit forms
of communication simultaneously can have both approaches’ advantages. Various
pieces of literature refer to this form of interaction as a hybrid form of interaction
including (Barca and Sekercioglu, 2013);(Yan et al., 2013);(Sahin et al., 2008) to
2.4.4 Representative Architecture
Any multi robot system inevitably needs to define the aforementioned parameters
prior to system level design or individual behaviour design. In fact, these axes
determine the type of behaviours required for individuals. For instance, if a team of
robots is homogeneous, individuals can model each with unified dimensions. Over
the past decade, several architectures have been developed for different applications.
Few of these architectures are so well-defined that they are adopted as sub-categories
and directions in multi robot system. In this section, few of these architectures are
reviewed.
CEBOT (Cellular roBOTics system): First introduced by Fukuda and Kawauchi
(1990). It is a decentralised hierarchical architecture. A CEBOT team is divided
into smaller groups with local leaders. The leader robots are responsible to
allo-cate subtasks and communiallo-cate with other leaders. A distinctive characteristic of
CEBOT is that robots dynamically reconfigure their formation by changes in the
environment as the architecture is inspired by the cellular organisation of biological
entities (Cao et al, 1997).
SWARM: It is a distributed, decentralised, autonomous large groups of robots
(n > 10) that normally interact with each other through the environment. Swarm
robotics inspired mostly by swarm intelligence. Swarm intelligence is defined as
col-lective intelligence that emerges from interactions among large groups of autonomous
individuals (Barca and Sekercioglu, 2013). Sahin (2004) defines “Swarm robotics as
the study of how a large number of relatively simple physically embodied agents can
be designed such that a desired collective behaviour emerges from the local
inter-actions among the agents and between the agents and the environment”. In swarm
et al., 2008). Robustness, flexibility, and scalability are built in characteristics of a
swarm.
GOFER: It is first developed by Caloud et al. (1990) to study distributed problem
solving in indoor environment in a team of mobile robots (Uny Cao et al., 1997).
In this approach, a central unit, which has a global view of the given task and the
rest of the robots, generate a plan structure which contains task distribution and
team scheduling. The GOFER architecture was successfully used with three physical
robots for tasks such as following, box-pushing, and wall tracking in a corridor.
ACTRESS (ACTor-based Robot and Equipment Synthetic System): First
intro-duced by Asama et al. (1989), and inspired by Universal Modular ACTOR
Formal-ism (Hewitt et al., 1973). This architecture consists of three heterogeneous robots
each responsible for different task along with three workstations. In the deployed
application domain, individuals are not capable to perform the given task (e.g.
push-ing a box) alone, and they have to cooperate with each other. The cooperation and
coordination are achieved through negotiation among robots, hence the focus of this
approach is to improve the efficiency of the communication among robots.
ALLIANCE: Introduced by Parker (1994b), ALLIANCE is developed originally
to study cooperation in a heterogeneous, small-to-medium-sized team of robots.
ALLIANCE is a hybrid in communication architecture since the information is
per-ceived from the environment as well as broadcast messages in the environment.Although
with explicit forms of communication high level of accuracy can be achieved, the
overall computational cost of the system increases as the number of participating
robots increases. With implicit forms of communication, although perception and
interpretation of information are more complex, the stability, flexibility, and fault
How-ever, various researches suggest that systems in which interaction is carried out by
combination of both implicit and explicit forms of communication simultaneously
can have both approaches’ advantages. Numerous pieces of literature refer to this
form of interaction as hybrid (Barca and Sekercioglu, 2013);(Yan et al., 2013);(Sahin
et al., 2008).
2.5
Main Questions in Multi Robot System
The multi robot system is a group of autonomous agents which have a shared goal
and work together to achieve the given task. From the psychological point of view,
robots are selfish, utility-driven agents (Uny Cao et al., 1997) which only aim to
succeed at the given task. In this situation, competition rather cooperation emerges
in a group of single robot systems to access the shared resources in the environment
(Jones and Mataric, 2005). It could be said that the key element that separates
multi robot teams from a group of single robot systems is cooperation (Jones and
Mataric, 2005).
Cooperation requires three main elements: task partitioning, task allocation, and
coordination. In any multi robot application, the global task has to be analysed,
and if necessary the global task has to be divided into manageable portions referred
to as sub-tasks. This process is referred to as task partitioning. Next, each subtask
is distributed to one or more individuals in the team. This process is referred to
astask allocation. Finally, robots attending sub-tasks require resources (including a
point in space) which have to be accessed while any probable congestion is avoided.
This process is referred to as coordination. In this section, these research elements
2.5.1 Task Partitioning and Allocation
The problem of task allocation is to respond to the question of“which robot is doing
which task?”. In order to answer this question, the global task has to be decomposed
into two or more sub-tasks. Task allocation and task partitioning are strongly
inter-twined together. According to Dias et al. (2006), there are two common approaches
for the aforementioned question. In one approach, the task is first decomposed and
then sub-tasks are allocated to the robots (also refer to as decompose-then-allocate)
(Caloud et al., 1990), or the global task is given to all individuals, and each robot
individually decomposes it to smaller manageable pieces (also known as
allocate-then-decompose) (Botelho and Alami, 1999);(Pini et al., 2011).
Task partitioning (or decomposition) also depends on the characteristics of the task
and the capabilities of the robots. According to the taxonomy provided in (Gerkey
and Mataric, 2004), a team of robots and a task can be classified based on few
characteristics:
(I) Single Task robots versus Multi Task robots: Multi Task refers to robots
which are capable of executing multiple tasks at a time, and Single Task refers
to robots which are capable of executing only one task at a time.
(II) Single Robot task versus Multi Robot task: A Single Robot task refers
to a task which require only one robot, whereas a Multi Robot task refers to
a task which require more than one robot to be completed.
(III) Instantaneous Assignment versus Time extended Assignment:
Instan-taneous Assignment means that the task can be allocated to individuals
in-stantaneously and without any extra information. Time Extended refers to
envi-ronment, the team, or the completion state of the task.
There are various methods that the global task can be divided and distributed among
a team of robots. In here, the reviewed task allocation methods are divided into two
main approaches: (I) Static Task Allocation, and (II) Dynamic Task Allocation.
In static task allocation, prior to task execution, the task is divided into smaller
man-ageable sub-tasks and distributed to each individual in the team at the design time.
For instance in applications related to processing an open field, the environment is
first divided and distributed among robots in a way so that robots’ navigation are
minimised using various theories and algorithms including graph theory (Sungjun
et al., 2015), (Fazeli et al., 2010), and (Ahmadi and Stone, 2006). Although static
allocation is fast and efficient, it does not tolerate any real-time changes that could
occur in the environment.
In dynamic task allocation, the task will be distributed among robots during the task
execution. According to Karla and Martinoli (2006) The dynamic task allocation
can further be classified into two sub-categories: threshold-based and market-based
task allocation. In threshold-based approaches, the robots utilise the changes in the
environment to identify the state of the global task and what is required to be done
next. A robot resumes its search for hints in the environment until it reaches the
conclusion that the global task is completed. Threshold-based task allocation has
been applied to various application domain including foraging (Krieger et al., 2000)
and aggregation (Agassounon and Martinoli, 2002).
In market-based approaches, robots act as self-interested agents in pursuit of
indi-vidual profit. Tasks often are distributed through auctions held by an auctioneer.
The auctioneer is either a supervisor agent or one of the robots. “Each robot
and encapsulate the cost in the bids” (Dias et al., 2006). Depending on the task,
the auctioneer selects the highest or the lowest bidder (Karla and Martinoli, 2006).
Sometimes, instead of allocating particular task, such as shoot the ball or cover
a specific area, roles are assigned to the robots. Roles define a collection of
re-lated actions or behaviour (Dias et al., 2006). Auction-based task-allocations have
been applied to cooperative exploration (Zlot et al., 2002) and object manipulation
(Gerkey and Mataric, 2002).
2.5.2 Coordination
Coordination is the core element of a multi robot system by which the overall
perfor-mance of the system is affected directly (Yan et al., 2013). Various works have been
carried out in this area. In here, we review the available two important categories
of coordination systems in multi robot systems: Dynamic and Static.
Dynamic vs Static In one classification, coordination can be carried out
stati-cally, or dynamically. In static coordination, which is also known as deliberative or
offline coordination (Todt et al., 2000);(Iocchi et al., 2000), robots adapt series of
conventions prior to engaging in the task (Yan et al., 2013). Kato et al. in (Kato
et al., 1992) coordinates a team of robots by simply applying few navigational rules
(e.g. “keep right” or “stop at an intersection”, etc). Although coordination can be
achieved efficiently and quickly, it requires detailed analysis of the given task, and
it can easily fail by radical changes in the given task or the environment.
Dynamic coordination, which is referred to as online or reactive coordination (Todt
et al., 2000);(Iocchi et al., 2000), is carried out during execution of a task and is
based on “analysis and synthesis” of information which can be obtained by means of
robots is conveyed explicitly or implicitly. Accordingly, dynamic coordination is
performed either by transferring intentional messages (i.e. explicit coordination
(Gerkey and Mataric, 2004)) or as a result of robots local interacting with the other
robots or the shared environment (i.e. implicit coordination). Dynamic coordination
can well adapt to changes in the environment in real-time, however, coordination is
becoming more complex by the increase in complexity of the task.
Taxonomy Based on Individual Knowledge and Awareness In another
clas-sification introduced by Farinelli et al. (2004), coordination in the team can be
cat-egorised according to individuals’ knowledge and awareness. In this classification, a
multi robot system is one of the following:
Unaware in which individuals have no information about other robots in the team
while they execute their share of the task. Since robots have no knowledge about
each other, the communication among the robots cannot be direct. Unaware teams
are easily scalable, thus they are adopted for swarm robotic applications.
Aware, not coordinate systems in which robots of the team have the knowledge
of the presence of other robots in the environment, and act together in order to
accomplish the same global goal. However, a robot may not take into account the
actions performed by other robots in order to accomplish its task.
Weakly coordinated systems in which individuals follow explicit predefined
co-ordination protocols. In here, coco-ordination protocols refer to the explicit predefined
rules that select particular
Strongly coordinated, strongly centralized systems in which a robot plays the
role of the leader and it coordinates other robots in the environment. This method
requires explicit messages to be transferred among robots. This method suffers from
Strongly coordinated, weakly centralized systems in which the leader is
se-lected in prior, and it will be sese-lected during execution time. In weakly centralised
approaches, the interaction architecture is hybrid. This means that the robots
ex-change information via explicit and implicit forms of communication. Noreils (1993)
and Simmons et al. (2001) are two examples in which the coordination is achieved
by means of hybrid interaction architecture.
Strongly coordinated, distributed systemsin which each individual in the team
executes a coordination protocol, and takes its decision completely autonomous.
These systems are generally more robust to communication failures and robot
mal-functioning, even though these problems may affect the overall performance of the
team in the accomplishment of the task. “The strongly coordinated distributed
approach entails that some kind of communication has to be used, and leaves
un-constrained the other System Dimensions” (Farinelli et al., 2004).
2.5.3 Congestion Avoidance and Clearance
The goal of coordination is to prevent or resolve probable congestions during task
execution. There are two sources of congestion in a multi robot system: collisions
and resource conflicts. Resource conflicts occurs when multiple requests targeting
the same resource arrive simultaneously (Yan et al., 2013). The problem of
re-source conflict is not specific to robotic applications. In distributed computing and
multi-access networking, where a single resource is accessed by different processes,
a resource conflict occur