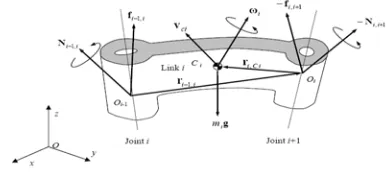
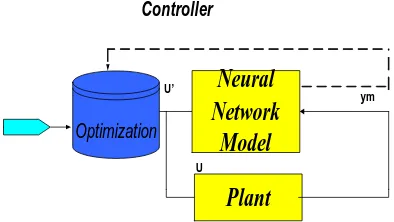
Neural Network Controller for Two links- Robotic Manipulator Control with Different Load
Full text
Figure


Related documents
“Analysis on Naguib Mahfouz’s Novel The Beginning and the End and Arturo Ripstein’s Movie Principio y fin.” Co-presented with José Antonio Valdés for the Instituto Nacional de
In Transition: 2010 CIFO Grants & Commissions Program Exhibition , The Cisneros Fontanals Art Foundation, Miami, US. Vectors of the Possible , BAK, Utrecht, NL
Results: In our study, we found MCM2 expression was increased in LUSC tissues compared with paired adjacent normal lung tissues or lung adenocarcinoma tissues through analyzing
Length frequency distribution of Queensland east coast Spanish mackerel collected from commercial and recreational catches in all regions during the 2004–05 sampling season
Metallocene and other single site catalysts are able to copolymerize ethene and propene with short and long chained a-olefins, cyclic olefins, or polar vinyl monomers such as ethers,
To further increase the frequency of delirium assessments, the delirium screening tool was standardised and a critical care progress note was implemented that included a section
For the championship the IKF had devised a rather unique formula: to make the tournament more interesting for the teams, the media and the spectators 8 of the 10 teams (all but
