http://wrap.warwick.ac.uk/
Original citation:
Goh, W. B. and Martin, G. R. (1991) Deriving optical flow in noisy image sequences. University of Warwick. Department of Computer Science. (Department of Computer Science Research Report). (Unpublished) CS-RR-190
Permanent WRAP url:
http://wrap.warwick.ac.uk/60879
Copyright and reuse:
The Warwick Research Archive Portal (WRAP) makes this work by researchers of the University of Warwick available open access under the following conditions. Copyright © and all moral rights to the version of the paper presented here belong to the individual author(s) and/or other copyright owners. To the extent reasonable and practicable the material made available in WRAP has been checked for eligibility before being made available.
Copies of full items can be used for personal research or study, educational, or not-for-profit purposes without prior permission or charge. Provided that the authors, title and full bibliographic details are credited, a hyperlink and/or URL is given for the original metadata page and the content is not changed in any way.
A note on versions:
Research repoft
190
DERIVING
OPTICAL
FLOW
IN
NOISY
IN{AGE
SEQUENCES
WOOI
BOON GOII
GRAHAN{ R.
MARTIN
A
technique
is
presented
extracting local
image
motion
utilising
the properties of
spatiotemporal orientation in the frequency domain. This technique is based on the eigenvalue analysisof
the inertia
tensormatrix
of
the frequency domain.An
iterative
velocity
field
snroothing algorithm was developed based on the properties of a variantof
this inertia tensormatrix.
This iterative algorithm is
ableto
smooth noisy translational,rotational
and othersmoothly varying velociry
flow
fields, rx'ithin the constraints of motion discontinuities. Some results from the application of this algorithm to noisy random dot sequences are presented.Department of Computer Science
University of Warwick
N-CONTENTS
1.
Introduction
2.
Representation1.1
Motion
1.2
Motion
of
Motion
in
the
Frequency
Domain3.
Extracting Image
Motion
33.1
Spatiotemporal Orientation
Detection
...'...
33.2
Interpreting the
Eigenvalues and Eigenvectors...
64.
Cooperative Boundary Detection andVelocity
Field Smoothing ...4.1 Velocity Field
Smoothing4.2
Neighbourhood
Summation atBoundary
Points4.3 Motion
Boundarv
Detection5.
Experimental
Results
5.1
Translational
Flow
Field
5.2
Rotational
Flow
Field
l7
6.
Summary
7
.
Referencesas
Orientation
...
2
2
2
8
8
11
12
t4
15
19
Dertving
Optical
Flow in
Noisy Image Sequences
W. Roon
Coh,
GrahamR
MartinDept. of
Computer
Science, Unlversity ofWarwlck,
Coventry.July
1991l.
Introductlon
One
of
the key challenges in image sequence analysis is the estimation of instantaneous velocityvectors
for
eachsmall
region on
an image plane.The derivation
of
this two
dimensionalvelocity
vectorfield,
commonly
termed 'opticalflow'
fHorn & Shunck8/],
represents the firststage
in
many image sequence analysis problems, like extracting structurefrom
motion, objectracking
and image compression.Braddick
suggestedtwo different
motion mechanisms used by the humanvisual
system; thelong range and short range mechanismsfnraddickT4l.The long range mechanism operates over
a larger spatial extent and is generally believed to be based on identifying and tracking features.
The short range mechanism however, operates
over
a shorter spatial distances and involveslower level
visualinformation
such as image intensity. Correspondingly,over
the years, twodistinct approaches have been developed for computing motion from image sequences f,Aggorwal
& Nandhabtna,'Ed1. They are broadly classified under feature-based methods and gradient-based
methods.
The former attempts
to
estimate image
motion
by
establishing
inter-framecorrespondence between distinct features like comers and edges. Whereas the laner computes
it
directly
from
the grey-level va-lues in the image sequence.In
this report, we
will
describe a
methodfor
estimating
local
imagevelocity
which
hascharacteristics
similar
to
the
short
range
motion
mechanism.
This
method
adopts
aspatiotemporal gradient approach
which
utilises the frequency domain propertiesof
severalimage frames that are closely sampled in time. We
will
show how local image velocity could beextracted
by finding
a tilted plane thatfits
the frequency power spectrain
a least squared error manner.An
iterativevelocity
smoothing algorithm is also described. Thisalgorithm is
able to smoothnoisy
velocity flow fields while
taking into
account the presenceof
motion
discontinuities.2.
Representatlon of Motlon
2.1
Motton
as
dentatlon
Image
motion is
theresult
of
the translationof
brightness patterns across the image plane.Assuming
the changesin
imageintensity
valuesare
duesolely
to
the translationof
thesebrightness patterns over time, we have :
f
(x,
Y,
t)=f (x-r^t,
Y-rYt,
t)
(1)where
r*
and ry are the horizontal and vertical components of the imagevelocity
r.This change
in
intensity is characterised by a 3-dimensional orientationin
x-y-t
space lAdelson& Bergen S5] .
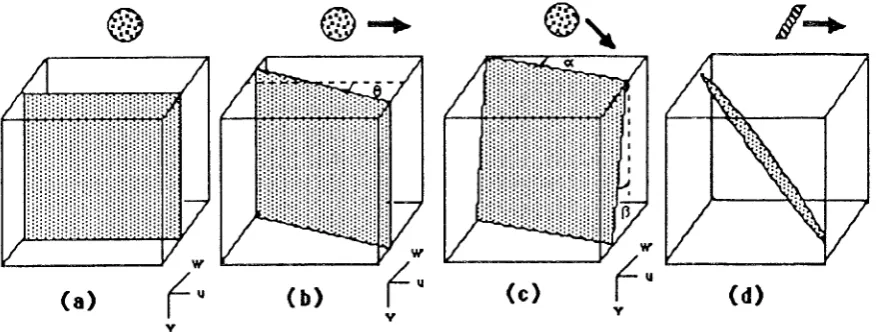
Fig
1a shows a bar which moves to theleft
with
time.In
x-y-t
spaceit
forms avolume slanted
in
the temporal axis and the degreeof
slant corresponds to the velocityof
thebar.
The
task
of
motion
detection
could thus be viewed as
a
problem
of
detectingspatiotemporal orientation.
f'
(a)
(b)
Fig.
I
- Image motion represented as spatiotemporal orienration in 3-dimensional x-y-t space2.2
Motlon
ln
the
Frequency Domaln
Spatiotemporal
orientation
has a simple representationin
thefrequency domain
fwatson &Ahumada '851. Taking the Fourier transform of equation (1) gives :
Ff
<X-rxt,
y-ryt,
t)
=
F(u,v,
w+rxu+rrv)
(2)Each temporal frequency is shifted by the amount - (r^ u +
r,
v), proportional to the local imagevelociw.
[image:5.595.115.457.395.525.2]-Fig. 2a
shows the specffumof
a stationary pattern, where energyis
concentratedin
the uv-plane.As
the pattern translates (Fig. 2b), the spectrum tilts into the temporal axis (w-axis), thelarger the
angle0,
the larger
thevelocity.
Fig.
2c
illustrates the casewhen
there are bothhorizontal
and verticalvelocity
components, where thehorizontal
componentrx
is given bytan
(cr)
andthe
vertical
componentr,
is
given
by
tan(F).
Finally, Fig. 2d
illustrates
thespectrum
of
amoving
edge. The edge, being one dimensional, produces a one dimensionalspectrum which is concentrated about a line through the origin. The plane cannot be determined
unambiguously, hence
only
the velocity component ofihogonal to the edge can be found. Thisis commonly termed the apernrre problem [Marr & Ullman'81).
@+
@1
(c)
(b)
w
u
(
w
u
(
(d)
Fig.2 - Representation of motion in ttre frequency domain (see tcxt).
3.
Extracttng
Irnage
Motlon
For the
purposesof
deriving
anoptical
flow field,
we requireonly
the
local
uanslationalinformation. This is
because non-rigid motions, rotation and scaling produce a varying twodimensional
flow field
except
at
relatively small
image
regions.
By
taking
a
smallspatioremporal
window at
eachof
these image regions andfitting
aplane to
eachof
theirfrequency spectra, we can estimate the true velocity
flow
field of the image sequence.3.1
Spatlotemporal
d.entatlon
Deteetlon
There
have been severalmethds
proposedfor
extracting spatiotemporal orientation from asequence of images. One rnethod is the use of spatiotemporal
filters
lLleeger 871. Heeger used afamily
of
Gabor-energyfilters
that were tuned to different spatial orientations and temporal frequencies.By
combining the responsesof
eachof
thesefilters
in
a least square manner andnormalising the response
from
each spatial orientation separately, he was able to resolve theaperture problem and extract the unambiguous velocity
for
a greatvariety
of
highly
texturedfanslating
patterns. [image:6.595.87.527.248.414.2]Bigun and Granlund proposed a rnethod
fordeternining
local orientation in a multidimensional space.Their approach is
analogous to the probleruof
reducing three dinrensiclltal tensors totheir
principal
axes,but
applied to the spectral energyin
the Fourier domain IBigun & Granlund'87),
As
shown
earlier
in
Fig.
2d, the
spectralenergy
of
a
linearly moving
edgeis
alwaysconcentrated
on
aline
through theorigin
in
theFourier
dornain.If
we consider the spectral energy as masses rotating about the axis ko, then the inertia about the axisko
is givenby
:I(kp)
= IF(k)
12ot
where
d(k,kp)
is
the Euclidean distance function between eachposition in
the Fourier spaceand
the
line
representedby
the axisko. (To simplify
expressions, thex-y-t
spacewill
berepresented by the vector x and the u-v-w frequency space
will
be represented by the vector k).The problem here is to
find
the axis ko that minimises the inertia functionl(kp).
This could besolved by formulating an eigenvalue problem given by
(3)
oo
l's
j
d'(k,kp)
-6
I(kp)=
kotJto
(4)(s)
where
lkpl=
I
and is orthogonal.J
is the inertja tensormatrix in
(3) whose diagonal elementsare
Jii
=j*i
oo
f^a
J
k:'
I
F(k)
l'
dk
-6
and
non-diagonal elements areJij -
J
*,
k;
I
F(k)
12dk
Finding
theminimum inertia I(kp),
corresponds toenergy
in
the least squared error sense' This is givenof
J.finding
the axisko
thatfits
the spectralIt
is possible to solve this eigenvalue problem in the spatial domain.Utilising
the differentiation propefiiesof
the Fouries transfonn , it can be shown that fBracewell '861 :r,2
In{r)
t2 =
-#
,fr,t
andk;k;
rF(k)t2
=-#,frfr,
(7)With
(7)and
Parseval's theorem, we can ffansform the integral in equations (5)&
(6) from theFourier k-space to the spatial x-space using the inverse Fourier transform.
Furthermore,
to
limit
the determinationof
imagevelocity to
alocality
at imagepoint
xo, aweighting
fun*ion
g(x)
is utilised to control the sizeof
the effective neighbourhood The finalexpression
for
the diagonal elements of the inertia tensor matrix areJ11
(xs)
=I
(8)j*i
;
.6r.r
;
g(x-x6)
(. )'dx
J
OXjThe inertia tensor matrix J could be expressed in another form :
J=
f
trace(A)-A
and for non-diagonal elements :
oo
(
r..
/v
,)
= _ |
g(x_xs)
(
"rJr^o,
J
".
-oo
€
A;1
(xe)
=
f
91*-*o)
(5)t
o*
I
dxiand non-diagonal elements:
(
,6f
Df,
A1i
(xs)
=
J
s(x-xo)
(.*,
Un,
o*
*fr".
(e)(10)
where the trace
of matrix
A
is the sum of its diagonal elernents andA
has diagonal elements :(11)
(r2)
lt
can beshown
that both the J andA
matrices share the same eigenvectors lBigun and GranlutdFinding the eigenvector corresponding to the least eigenvalue
J
is now equivalent to hnding theeigenvector corresponding
to
the largest eigenvalueof
A.
There
are several advantages indealing
with matrix A
instead of J and thiswill
be become apparentin section 4.
The elementsof
A
associatedwith
the neighbourhoodof
the imagepoint
xo
can be evaluatedby
simplesummation
of all
the partial
derivativeswithin
theweighted
neighbourhood. These partialderivatives being
first
obtained through appropriate partial derivative f,rlters.In this work,
the weighting window g(xo)
was a5x5x5 Hamming window
and the partialderivative
filters
were designed utilising the 3x3 edge detection kernel of Wilson andBhaleroa-fWilson & Bhaleroa'90). The eigenvalues and eigenvectors
of matrix
A
were evaluated using theNAG library
routine FO2ABFfor
a symmetric matrix. This routine reduces the marrix to upper Hessenbergform atrd
uses the QR algorithm to determine all eigenvalues and eigenvectors.3.2
Interprettng the
elgenvalues
and elgenvectorg
The solution to the eigenvalue problem of matrix
A
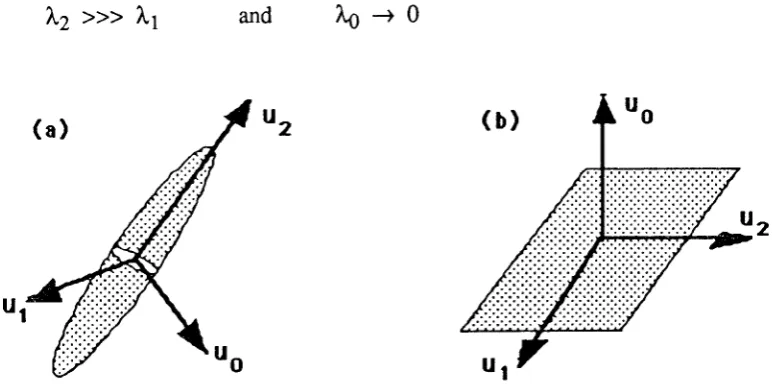
yields 3 positive eigenvalues :)'z'7l
>
h
>
0
(indescendingorder)
and their corresponding eigenvectors u2,
ut,
u6. When the grey-levels in the image sequenceare constant, we have :
ltZ=7\=h=0
(1 3)Under these
conditions,
novelocity
vectors are obtained.In
image regions wherethere
aremoving one dimensional features like lines and edges, the spectrum is concentrated about a line
through the
origin
given by the eigenvector u2r corresponding to the iargest eigenvalueIz
(seeFig. 3a). Under these conditions :
)rZ
,>, )"t
and
IO
-
0 (14)Fig. 3 - Eigenvectors corresponding
n
(a) a translating edge and (b) a translating !-D pattern [image:9.595.118.506.543.739.2]In
regions containing moving two dimensional featureslike
corners and textured surfaces, the spectrumwill
be concentrated about a plane through theorigin,
the normal to which is given bythe
eigenvector u0,
correspondingto
the
least eigenvalue L9 (seeFig.
3b). Under
theseconditions :
)tZ'
)tt
andlo-0
Using
simple
vector
geometry,it
canbe shown that the horizontal
andvertical velocity
componentsin
the direction of the image gradient are givenby
:(1s)
rr
Yx= ---)
ux utt
ux- +
uy-
and
Vy=
-o*2
*
ur2
(16)
where ux, uy, ur are the components of the eigenvector u2.
This
velocity
cannot, under most circumstances, be regarded as the true imagevelocity.
Thetrue image
velociry
can only be extracted when the spectrumfits
unambiguously about a planeand this
velocity
is given by :v*=
uxut
u
and
Vv
'ur
= (17)where u1, uy, u1 &re the components of the eigenvector ug.
Another
useful
ffteasure that can be extractedfrom
the three eigenvalues)rz,Lt
and l,gis
arealibility
measureof
the estimatedvelocity
at each image point. This certainty value C(xg ),indicates
how
well
the frequency spectrumfits
aline or
planein
a least squaredelror
sense,and is given
by
:C(xs)
=
I ( 18)1,9+l,t+7"2
The certainty measure C(xo ) is normalised and thus takes a value between 0 and 1; the closer
the value is
to
1, the more reliable is the velocity estimate.4.
Cooperatlve
boundary detectlon
and
veloelty
freld smoothlng
Studies
of
the human motion detection system fVan Doorn & Koenderint 831 suggest that highnoise
immunity
is
achieved through spatiotemporalintegration
of
motioninformation
overextensive spatial area and time duration. However, this integration process does not
blur
outthe
visibility
of
boundaries demarcating regions movingwith
different velocities. This impliesthat spatiotemporal integration
of
motioninformation is in
some way guided by constraintssuch as the presence of motion discontinuities.
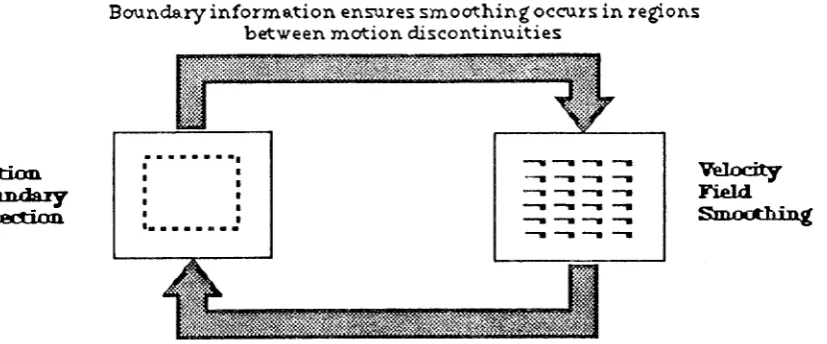
Boundary
information
en$res
sm o othin g oc(alrsin re$ons
between
motion
discontinuities
Itotim
BGDdsry
Dceci@
Rtocity
fi€td
Sn€ctbing
Smoothed
velocity field
improves rnotionboundery
detectionFig. 4 - Cooperative interaction between motion boundary detcction and velocity smoothing
A
scheme is proposed here, as shownin
Fig. 4, where both the detection of motion boundariesand the spatial integration
of
localvelocity
estimates occurin
tandem. Each process interactswith
the otherin
a manner that serves to improve both the detectionof
the motion boundaries and the smoothness of the velocityflow
field.4,1
Veloctty
field
smoothlng
This
algorithm
achieves velocityfield
smoothingin
an iterative manner, propagatingvelocity
information from each image
locality
to its spatial neighbourhood. The propagation of velocityinformation is
weightedby
its
certainty
measure, ensuringthe
suppressionof
poor
initial
velocity estimates and enhancing the influence of more reliable ones.
[image:11.595.102.516.254.426.2]As
shownearlier in
equations (11)&
(12), thenratrix
A
atpoint
xo is obtainedby
sunrnringall
partial derivativeswithin
its windowed neighbourhood.In
order to achieve more extensiveiltegration
of
ntotion information, this summation is extended to include the partial derivativesof
the
A
ntrtrices frorn
the8
imagepoints
immediately
surroundingpoint xo.
At
the kthiteration, the summed elements of the
A
matrix at image point (xo, yo) is given by :A11 (xo,y6 ;
k) =
^t
,i
F'(xo+n,yo+m
;
k-1)
A11 (xo+n,yo+m ; k-1) (1e)The
certainty
measure C(xo+n,yo*m
; k- I ) for eachof
theA
matrices in the neighbourhood isdefined
by
equation(18). Its
valueis
squaredto
increase the suppressionof
poor
velociryestintates.
After
surnmationof all
the neighbouringA
matrices, each matrix elementof
theresulting
A
rnatrix is nonnalised appropriately as shown :A1i (xo,
ye;
k)
=Ail
(xo, yo
;
k)
(20)j i
"'(xo+n,
yo*m;
k-1)
n=-l
m=-lWith
each successive iteration, the spatial extentof
motion information integration is enlargedThis occurs
becauselocal velocity
estimatesare being
progressively passedfrom
oneneighbourhood to another through the iterative neighbourhood summation process.
With
theuse
of
acertainty
weighting function C(xo), the integration process enhances the propagation of goodinirial
velociry estirnates while suppressing the effectsof
unreliable ones.Some
of
the
results of the velocity smoothing algorithm are illustrated below. Fig. 5 shows thecentre frame
of
the
image
sequence used.The
sequenceis
corrupted
with
additive
spatiotemporal Caussianwhite
noise and has asignal-tonoise ratio
of
l0dB.(a)
(b)
[image:12.595.84.516.533.725.2]The
first
sequence has thecircle
shownin Fig.
5b nroving
linearly with
avelocity
of
0.5pixeVfranre. The velocity estimates illustrated
in
the examples below are all taken from level Iof
the sparial lowpass pyrarnidof
each framein
the inrage sequence lBurt&Adelson 831.Fig.6
show,s the
effect
of
the snroothing algorithm atvarious
iterations. Goodinitial
estimates areobtained
in
areaswith
a
strongintensity gradient,
such as the edgesof
thecircle,
and areprogressively
propagatedinwards
and outwards.By
a combination
of
the propagationof
strong
motion
energy at thecircle
edge and the suppressionof
poorvelocity
estimates, therandom noise
in
thevicinity of
the circle appears to movein
a coherentfashion,
in a similarway to
thatof
the circle.This
phenomena calledmotion
capture fRamachandran&
Anstis 831 is observed by the human visual system.(a)
(b)
(c)Fig. 6 - Velocity field of circle moving rightwards. (a),O),(c) are results at iterations I,5&20 respectively.
This
smoothingdgorithm
iseffective
notonly
for
translational motion.As
shown below inFig. 7,
the radiusof
thecircle is
now expanding at 0.5 pixeVframe. As most natural velocityflow fields
are smoothlyvarying,
except atmotion discontinuities, this
algorithm is able tointegrate neighbouring velocity estimates to produce
a
smooth velociry f,reld.(a)
(b)
Fig.1 - Velocity field of expanding circle. (a),O),(c) are resulr at iterations l, 5 & 20 respecrively.
!ill
lnirll'
f:;i
.ltl
::::
[image:13.595.79.545.247.422.2] [image:13.595.81.547.555.735.2]To avoid
integrationof
motion information
acrossmotion
discontinuities, image points that have been identified as boundary points by the motion boundary detection algorithm in section4.3,
ate not consideredin
the neighbourhood summation process. In other words,if
an imagepoint
xo
is
sunoundedby
8 neighbouring points,of
which
3 are boundary points. Then thesummarion process
in
equation(19)
will
only involve
the other5
good neighbours and theresultant A
matrixwill
be normalised accordingly.4.2
Netghbourhood
summatlotr
at
boundary
polnts
If
an
image
point
xois
a
boundary
point,
it
will
not
undergo
the certainty
weightedneighbourhood summation described
in
equation(19).
Instead,all its
8 neighbourswill
besummed
with
equal weighting irregardlessof
whether they are boundary points or pointswith
good velocity estimates. The elements of the A matrixof
a boundary point at the kth iteration isthen :
1lt
Aii
(xo,ys;
k)
=
g
^?,,J_rotj
(xo+n,yo+m;k-1)
(21)If
a boundary point actually lies on a motion discontinuiry, the equal weighted summationof
its neighbourhoodwill
ensure its certainty measue remains poor throughout the iterative process, thus maintaining a barrier whichwill
prevent motion information of different velocity regionsfrom
intermingling.In
cases where the boundarypoints
are detectedfalsely
dueto
the presenceof
noise, thissummation
of
the neighbourhoodwill
progressively improve its certainty measure, eventually4.3
Motlon boundary
detectlon
The
motion
boundary detectionalgorithm
was inspired by the n-rodels proposed by Reichardtand Poggio from their studies
of
relative motion discrimination abilitiesin flies
lReichardt andpoggio '791.
-I\ey
suggestedthat
largefield
pool cells sum informationfrom
many smallfield
motion detector cells and
it
is this summationof
motion detectors over an extensive spatial areathat allows
the largefield
cells to
detect the presenceof
motiondiscontinuities
within
that spatial extent.A
similar summation scheme is used here.The detection
of
boundaries betweentwo
regions ofdiffering
velocities relies on the fact thatthe certainty
measure at these imagelocations
is
generally much poorer thanin
areaswith
smoothly varying
velocity
fields.
By
summing
over
a
large spatial
area
at
motion
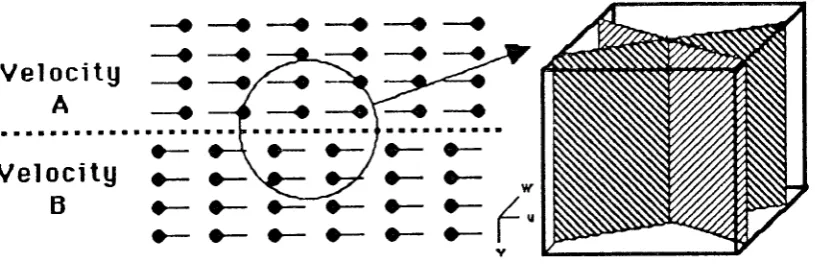
discontinuities, we would obtain a frequency spectra similar to that shown in
Fig.
8. Since thespectral energy is concenffated in two different planes, attempting a least square error
fit
of this spectra into a single planewill
resultin
large errors. This is shown upin
the eigenvalues of thematrix
A.
Eigenvalues 1"2, 1,1 and 1,gwill
all
be much greater than0, resulting
in
a low
certainty measure.
-a
--a
Vel
oci
tg
__{
---a
-{
l-Vel oci
tg
o-B
;-Fig. 8 - The frequency spectra at a motion discontinuity contains spectral energy ftat is concentrated about two
Jiff"r.nt planei corresponding to two distinct velocity regions. Poor certainty measures are obtained in this
region because an opdmal plane fit results in large errors.
Similar
neighbourhood summation ofA
matrices as in equation (19) is used here, except over alarger
spatial
neighbourhood.In
our
implementation,
an 8x8
neighbourhood was
used.Another
variance from equation (19)is
the normalisationof
each elementof
matrixA
by
thetotal
sum of allis
elements. This reduces the bias in the frequency specfra that may arise due toa non-uniform intensity gradient
within
the neighbourhood'A
circular
windowfunction is
used to reduce the influenceof
regions that are further awayfrom
the centre.-{
--a
o-
O-
o--o--
o-o- O-
u/O- O- ,/
;-
>-
r'
[image:15.595.95.503.394.531.2]'fhe
ele rlcnts of the sumrned matrixA
at point (xo, yo) on the kthiteration
is given by :A11 (xs, ye
;
k)
=1!11l!1".",
v"..
;
k-lt
*ftO
N4(xo+n, yo*m ; k-1)
where the normalising
factor
:N6(xo+n,
yo*rlt
; k-1)lAli
(xo+n,yo*m
;k-1)
Iand the rvindorving function :
44
IT
n=-4 m=4
(22)
(23)
(24)
133
=oI t
' i=l
j=l
w(n,m)
=
6.66 {/ .
t'?
After
neighbourhood summationof A
marricesfor
every imagepoint, their
corresponding eigenvalues are evaluated and their cerrainty nleasureC(xd
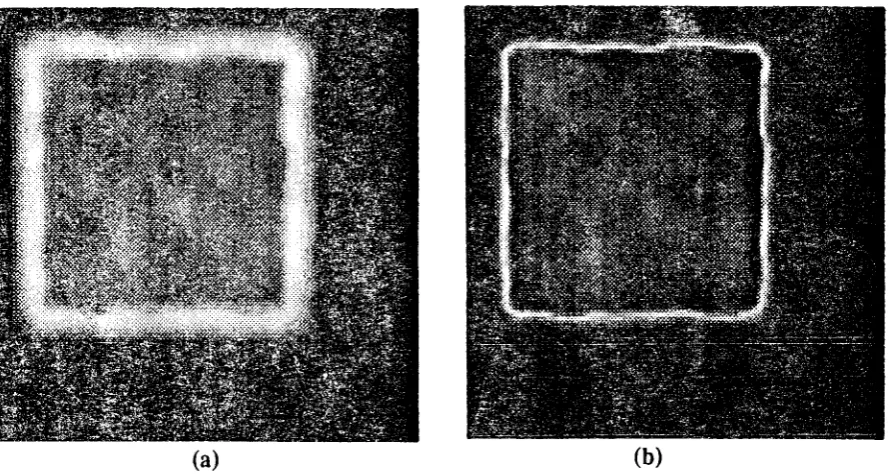
found using equation (18). Fig. 9ashows a scaled
plot of
the certainty measurefor
a random dot image sequence. As a resultof
surrrmatingover
a large neighbourhood, the motion boundary isfairly
wide. [n order to detectthe motion
boundariesmore precisely, boundary thinning
mustflrst
be performedon
thecertainty image in Fig. 9a.
Fig. 9 - A noise free random dot image of a moving square. (a) shows a linearly scaled plot of is certainty
[image:16.595.86.531.472.709.2]Boundary
thinning
is donein
thefollowing
nranner. Firstly the gradient,C'(xo)
at each pointof
the certainty imageC(xd
is obtained :C(xo)
=The boundary image is then obtained
from
the expression :B(xo)
=
C(xo)(
C'(xs)max
-
C'(xq)
)2ru{}r'.
tDSi'
(2s)
(26)
where C'(xs)rneu( is the largest gradient
value
in
the certainty image andis
used to scale theboundary image B(xo).
Boundary points are selected by setting a threshold value on the scaled boundary image B(xo).
The selection
of
a suitable threshold valueis
not toocirtical.
If
the thresholdis
set too high,q'eak
motion
boundariesmay
not
be
detected and 'leakage'may occur
betweendifferent
nrorion regions.
When
neighbourhoodsummation is
donein
theseregions, the
resultingcertainty measure
of
the summedA
matrix
will
deteriorate (see Fig. 8). This progressive dropin the certainty value
will
eventually'plug
up' the leak. This is a benefrtof
the adaptive natureof
thevelocity
smoothingalgorithm;
as the certainty measure at thekth
iterationis
obtainedfrom
the neighbourhood summedA
matrix
generated during the(k-1)th iteration.
However,the resulring motion boundary
will
beslightly
biased towards the region rvhich had a poorerinirial
certainty
measure.An
effective
techniqueto
prevent leakageis to
start
with
a low
threshold value and progressively raise this threshold with each iteration.The
position
of
boundarypoints found
by this
algorithmis
fed
backto
thevelocity field
smoothing algorithm. l,ocationsof
new boundarypoins
are updated before proceeding to thenext iteration
of
snloothing. Likewise,
boundary points that havefallen below
the
new threshold valuewould
revert back to points having good velocity estimates.5.
Experlmental
Results
All
results presentedin
this
sectionwere
computed usingthe
lowest
level
of
the
spatiallowpass pyramid.
Additive
spariotemporal Gaussian white noise was addedto
all
test imagesequences to obtain a signal-to-noise
ratio
(SN,R)of
i0dB. The SNR isdefined by
:;r
where
o;2
andon2
are the
variances
of
the
clean image
sequenceand
added
noise respectiVely.5.1
Translatlonal flow
field
A
square was extracted from a static random dot image and made to translatediagonally with
each consecutive
image frame. The moving
square'shorizontal and
vertical velocity
contponents were both 0.5 pixeVframe. The velocityflow
fields are shown below inFig.
10.(a)
(b)
(d)
Fig.
l0
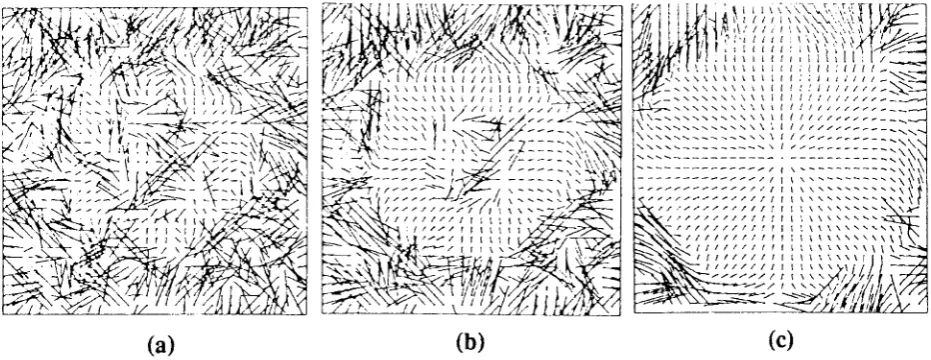
- Moving random dot square. Each vector in the flow field is depicted by a line whose length anddirection is proportional to the velocity estimated at that image point. (a) I frame from the image se.quence with
a SNR of t0OS. (b),(c)&(d) Velocity flow field at iterations 1,5 and I
l
respectively. The boundary points seenas light grey dots reveal the slructure of the moving square patch. False boundary points at image regions badly affected by noise are progressively removed with each itcration.
r r'ii
\\'
\\'
\\'
\\:
\\;
\\:
\\t'\\
\ \11
\ \ii \\i '_-!'
\\\\\\\\\\\
\\\\\\\\\\\
\\\\\\\\\\\
\..\\\\\\\\
\
\
\,\\\\\\\\\
\\\\\\\\\\\
\ \\\\\\\\\
\\\\\\\;
\\\
\\\\ \\\\\\\
\\\\\\\\\\\
\\\\,\\\\\\\
\\\\'-\\\\\\
\\\\\\\\\\\
\\\\\\\\\\\
;'\\\\\\\\\\
\\\
\\\\\\\\
\\\\\\\\\\
\\\\ \\\ \\\ \
\
\ \ \._\.\.\._\.:.\.\ ^\ \\.\.\'
\
\\':: \\
\\\\\ \
\.\\\\\
),,\\.\.\.\.'"
.:::::.--=:\\\\\\\\\\\\\rrrrr$
\\ \\\\\\\\\\\
\\
\\\\:'
\\\\ \ \\ \ \ \\\\ \\\\ \]i'
\
\\\\
\ \ \ \ rrr\.
r r r \' r $.'\\\\\\\\\\\\\\\\\\X'
\\\\\\\\\\\\\\\\\\\'
\\\\\ \\\\ \\\\\\\\
\ \_:\\\\\\\\\\\\\\\\\\\:
\ \ \\\ \\\\ \ \\ \ \ \\\ \ \ji
\\\\\\\\\\\\\\\\\\\i
\\\\\\\\
\\\\\\\\\\v
\ \\\\\\\\\
\\
\ \
\\\
\ \j'\\\\\\\\\
\\\\
\\\\\v
\
\\\\\\\\
\\\\ \\\\ \i'
\
\\\\\\\\\\\\
\ \\\\\-\\\\\\\\\\\\\\\\\\\i\ \ \\\\\\\\\\\ \ \ \ \ \ \i
\\\\\\\\\\\\\\rrrrf
[image:18.595.89.551.202.668.2]At
the 1Oth iteration, the nrean horizontal and vertical velocity componentsrvithin
the ntovingsquare
patch were
estimated
at
0.534 pixel/frame
(V^)
and 0.538 pixeVframe (Vr)
respectively.
Their
respective variances were 0.0004 and 0.0004. The ntean percentage erroresrimated
for
V*
was
6.9Voand
7.17ofor
Vr.
This
accuracyis
comparableto
the
resultsobtained
by
Heeger flteeger'87).The boundary images for the same
moving
random dot square at various smoothing stages a-reshown
below.
The positionof
themotion
boundary has a tendency to be biased towards the sideof
the region wirh poorerinitial
certainty measure, they are usually areaswith
a weakerFig. I
I
- Boundary images of the moving random dot square $Querrce. (a) shows the estimated molion boundaryorlerlaid over tie actual motion boundary of the centre image frame. (b),(c)&(d) are boundary images at iterations
l,
5&
II
respectively. Observe how the weak motion boundaries (eg: top left edge, just below t}re corner) wereprogressively reinforced wirh each iteration. Regions within the moving square patch that were significantly
conupted by added noise were gndually smoothed oul
intensity gradienr
[image:19.595.86.553.235.685.2]5.2
Rotatlonal
flow
fleld
A
rorarionalvelocity
flow field
was generatedby
applyingrotational
transforntationto
theranclom dots
u,ithin
a circleof
radius50
pixels, centred at the ntiddleof
a static randont dot inrage. This rotation has an angularvelocity
of
1 deg/frame. The rotationalvelocity
flow
fieldobtained
by
applicationof
the cooperative boundary detection andvelocity
field
smoothingalgorithm
is shown below inFig.
12.Fig. 12
-
Rotating random dot circle with SNRof l0dB. (a)
Shows one frame from the sequence- Thero6tional transforiration was done on an image twice the size and was then spatially lowpass subsampled to die required size for generating the roradng sequence. This was Lo reduce ermrs caused by the discrete nature of
the transformation a-igorithm. (u),(c)a(d) Srrows rhe rorational velocity flow field at iterations 1,5 and 20 respectively.
(b)
[image:20.595.85.556.189.644.2]Error estirnates
for
the rotationalvelocity field
were obtained at the 15th iteration. The nteanpercentage
error for
thevelocity
componentsV^
andV,
were 12.87o and 15.07a respectively(only
non-boundary points and pointswith velocity
components exceeding 0.01 pixeVframer,r'ere conside red in evaluating the nlean percentage error).
The boundary images
for
the same rotating random dot circle at various smoothing stages areshown below.
Fig. l3 - Boundary images of rorating random dot sequencel (g) 1n9ys the estimated motion boundary overla.id
on"the actual *otion uounoary of thE centre image frame.(b),(c)&(d) are boundary images at iterarions
l,
5 &20, respectively.
18
-'i
7 I
{
;/
I
T'
t:
i1 l: I
I
I
[image:21.595.87.551.201.656.2]6.
Summary
This
report
has describeda
techniquefor deriving
the
optical
flow field
in
noisy
image sequenceswhich
contain motion discontinuiries.It
has been shown howlocal
image nrotion can be characterised as spatiotemporal orientation, and this orientation can be detectedin
thespatiotemporal frequency
domain
as spectral energy concentrated abouta plane
or
a linethrough the
origin.
A
technique analogous to an eigenvalue analysisof
theinertia
tensor wasused to determine this orientation.
This
technique wasfurther
extendedto
smoothvelocity
flow
fields
by
integrating
motioninformation at each
locality with
thatof
its immediate neighbourhood.An
iterative algorithmwas developed that
ensuredthis
smoothing
was constrainedby
the detection
of
motiondiscontinuities.
A
further
strengthof
this algorithm
is its ability to
propagategood
initial
velocity
esrimareswhile
suppressing unreliable ones.This
has theeffect
of
improving
theoverall accuracy of the optical
flow
field
obtained, even underfairly
noisy conditions.The cooperative motion boundary detection and velociry
field
smoothing algorithm was shown toperform well
on both translational and rotational random dot image sequences. The meanpercentage error
of
thevelocity
estimates for translational motion was less that 87o, which iscomparable
to
existing motion
estimation techniques appliedto
similar noisy
random dotsequences moving at subpixel velocities flleeger'871.
The present
work
described here has only taken into account the spatial integrationof
motioninformation. Further improvement
in
noise immunity could be attained through the combinedspatial and temporal integration of motion information. There is also a need to combine in some
meaningful way, the
velocity
estimates at various levelsof
the lowpass spatial pyramid. Thiswill
enable the detectionof
a greater rangeof
velocitieswithin
the image sequence withoutunduly sacrificing the detection resolution of motion boundaries at regions
moving
with
slower7.
References
IEH
Adelson
&
JR
Bergen'S5]
-
"Spatiotemporal energy__modelsfor
the
perception
of
motion",
J. Opt. Soc.Am
A/Vol
2, No.2, Feb '85, pp 284-299.IJK Aggarwal
&
N
Nandhakumar '881-
']On_computation
of
motion from
sequencesof
imagei-
areview",
Proc.of
IEEE
Vol.76, No. 8Aug
'88 ,pp 917-935.IO
Braddick'74
]
-
"A
short range processin
apparentmotion", Vision
Res.14,
pp
519-527.
IJ
Bigun
&
GHGranlund'87] - "aptimal
orientation detectionof
linearsymmetry",
Procof
IEEE
ICCV
,Jun'87,
pp
433-438.IJ
Bigun
&
GH Granlund SS]
-
"Opticalflow
basedon
the inertiamatrix
of
the frequencydomain",
Procof
SSAB on Image processing,Mar'88.
IRN
Bracewell'86
]
-
"The Fourier transform and itsapplication",
McGrawHill
books.IPI
Burt
&
EHAdelson'83
I -
"The Laplacianpyramid
as a compact imagecode",
IEEE Trans.COM,
Apr'83,
pp 532-540.IDJ Heeger
'8n
- "Opticalflow
using spatiotemporalfilters",
J. Opt. Soc.Am
A/Vol
4, No.8,Aug
'87,pp
1454-1471.1BKP
Horn &
BGSchunck'8Il -
"Determining opticalflow",
AI, Vol.
17Aug
'81,pp
185-203.
lD
Marr &
SUllman'81)
-
"Direcfional
selectivity andits
usein
early visual
processing", Proc.R.
Soc.Lond.
B
2i1
'81,pp
151-180.IVS Ramachandran
&
SM
Anstis8fl
-
"The perceptionof
apparentmotion",
Sci.Am.
Jun'86,
pp
80-87.IW
Reichardt
&
TPoggio '79)
-
"Figure-grounddiscrimln1iign
byrelative
movementin
thevisual system
of
thefly",
Bio.
Cyber.Vol.
35,'J9,pp
81-100.IAJ VanDoorn & JJ
Koenderink'83)
- "The structureof
the human motion detection system",ipEE
Trans.SMC
13,No. 5, Sep'83, pp918-922
IAB
Watson&
AJAhumada
S5l -
"Model
of
humanvisual motion
sensing",
J.Opt.
Soc.Am
A/Vol
2, No.2, Feb '85,pp
322-341.IRG Wilson
&
ABhalerao '90f
-
"Kernel 49rig.nfor efficient multiresolution
edge detectionand orientation