108 Available online at www.ijiere.com
International Journal of Innovative and Emerging
Research in Engineering
e-ISSN: 2394 – 3343 p-ISSN: 2394 – 5494
FABRICATION OF ANDROID CONTROLLED FIRE
FIGHTING VECHILE
Maddu sireesha1
aAssitant professor, mechanical engineering
Vitam college of engineering , mindivaniaplem, Anadapuram mandal , Visakhapatanam,India.
ABSTRACT:
The main aim of the project is to decrease the human efforts to save their life in extreme conditions. There are times when the rescue team is unable to enter the scene of the accident due to various shortcomings that might endanger the rescuers lives. In order to overcome these possible obstacles, a lot of researchers have built various robots that can enter these dangerous sites in place of the rescuers. The main role in the project is to develop a network surveillance of a weapon robot which consists of surveillance system developed by a microcontroller. By using this system, the supervisor can control the robot by android app. There are many more applications present in this project, which are mentioned below Camera surveillance, Shooting, Firing, Stopping the fire and Robot Runner surveillance is done through the portable cameras which can be monitored by the operator and various applications can be controlled through it.
Keywords: Android app and Bluetooth, Arduino, Relay, DC Motors.
I. INTRODUCTION
A robot is an automatic mechanical device often resembling a human or animal. Modern robots are usually an electro-mechanical machine guided by a computer program or electronic circuitry. Military robots are autonomous robots or remote-controlled devices designed for military applications. MIDARS, a four-wheeled robot outfitted with several cameras, radar, and possibly a firearm, that automatically performs random or pre-programmed patrols around a military base or other government installation. It alerts a human overseer when it detects movement in unauthorized areas, or other programmed conditions. The operator can then instruct the robot to ignore the event, or take over remote control to deal with an intruder, or to get better camera views of an emergency. The robot would also regularly scan radio frequency identification tags placed on stored inventory as it passed and report any missing items. The applications involved in the robot surveillance, fire, shooting, and Bluetooth app and stop the firing. Surveillance robot is to recognize and detect motion automatically around a robot's environment. The robot design has been partitioned into control, and planning subsystems. Robotic surveillance appliance is built on a moving platform designed for surveillance and security tasks. This robot can be operated in “remote eyes” or “automatic trip” modes. Fire produced with spray and by energizing the graphite lead with battery supply which leads to produce spark on lead. Then the spray is been activated by the motor and it is sprayed on to the lead which produces a bunch of flames till the gas inside the spray bottle last’s. Shooting is been produced by the pressurized gas stored in the tank. With the help of solenoid ball wall which is been opened and closed with the help of a motor & when it is been opened the pressure runs out for escape and it is directed to flow through the PVC pipe and that pressure from the pipe shoots the object inside the pipe. The control of the complete process is done with the help of micro- controller (AT mega 328p) which is known as Arduino and it is been controlled wirelessly through Bluetooth
109 II. COMPOENTS ARE REQUIRED FOR FABRICATION OF ANDRIOD CONTROLLED FIRE
FIGHTING VEHICLE
Table 1. Components required for fire fighting vehicle
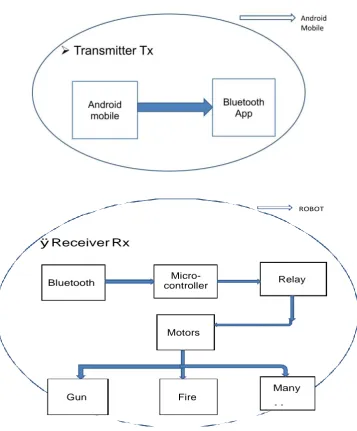
III. BLOCK DIAGRAM OF FIRE FIGHTING VEHICLE
Fig 2. Block Diagram of Fire Fighting Vehicle. Bluetooth name: HC-05
Micro-controller : ATmega328
Type of Relay : A four relay module
DC Motor : Power Supply:12V Rpm, Torque : 5kg
Hit spray, graphite lead, submersible pump, submersible motor with water bottle
ROBOT
ÿ Receiver Rx
Bluetooth controller
Micro-roller
Relay
Motors
Gun Fire
Many
110 IV. HARDWARE DESCRIPTION OF ANDRIOD CONTROLLED FIRE FIGHTING VECHILE
A. Circuit diagram of fire fighting vehicle
Fig 3. Circuit Diagram of android controlled fire fighting vehicle.
The above circuit diagram which simply shows the connections from the Bluetooth to Arduino and to the relay board which drives the motors.
Firstly HC05 Bluetooth is connected to the analog pins of the Arduino.
Vcc is the supply for the Bluetooth, ground is given to the GND & D11 RX,D10 TX are the receiving and transmission ports which are connected to the digital pins side of the Arduino because RX&TX is done through digital pins of Arduino.
The relay control pin from resistor is been connected to the digital pins so they receive the command from the software through Bluetooth which runs the motor’. The common port the motor is been connected and the VCC supply of the relay to drive motor's are taken from the 12v battery this is description of above circuit diagram.V. WORKING OF ANDROID CONTROLLED FIRE FIGHTING VEHICLE
The first device is the Android mobile phone which is use to controls the different tasks of the robot with the help of the self designed application. The command from the phone is transferred to the microcontroller wirelessly interfacing HC-05 Bluetooth between them. After receiving the command wirelessly to the arduino, the relay which is connected to the arduino by the given 0,1 conditions it operates the specific task by the given command.
A. Applications
Firing
Shooting
Watering
Surveillance111 Fig4. Components are involved in working of android controlled Fire Fighting Vehicle
In this one of the application like fire thrower which helps to distract or to injure the enemies for some extent. The other application is shooting which also plays an important role in the multi tasking robot because in tough conditions. In the terrorist attacks when the situation goes under control by the human then the robots are been used to tackle the enemies by shooting with their guns without putting human life into risk. So the above two applications are already in use by the military and police forces. The next application watering which also plays an important role in the fire department. This type of robot helps the fireman or any rescue people to enter into the scenario. These are mainly used because for the typical places where no one can reach. Surveillance is must for any kind of multi tasking robots because the any action or the application which is going to implement by the robot, such applications should be monitored and controlled by the controller. So the visualization is must for every robot for knowing its progress by the human being.
VI.RESULTS A. OUTPUT IMAGE OF WATERING
By the pump on command the water has been released when ever needed, which is shown in fig.6.1
Fig5.Output Image of Watering.
Bluetooth
112
B. OUTPUT IMAGE OF FIRING
By the fire on command the fire is been produced when ever needed, which is shown in the fig 6.2
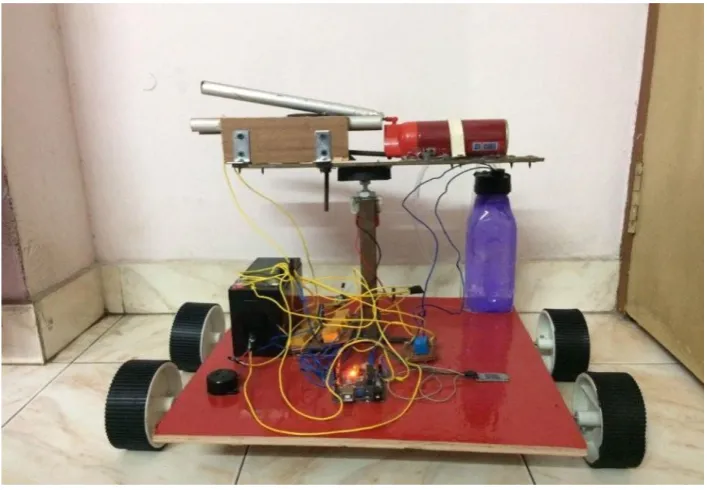
Fig 6. Output Image of Firing. C. FINAL IMAGE
Fig 7. Android Controlled Fire Fighting Vehicle.
VII. CONCLUSIONS
Fire causes tremendous damage and loss of human life and property. It is sometimes impossible for the fire fighter personnel to access the sight of fire because of explosive materials, smoke and high temperature. Through this we can conclude that robot can be placed where human lives are at risk. The robot can operate in the environment which is out of human reach in very short time. In such environments, fire fighting robots can be useful for extinguishing fire. These robots should be controlled remote operators who are located far away from the fire site using remote Communication systems. The robot accurately and efficiently finds the fire within minimum time after the fire is detected.
ACKNOWLEDGMENT
I would also like to express my sincere gratitude to Dr.B.S.Subramanyam, Head of the Department of
Mechanical Engineering for giving me this opportunity to work on this topic and guiding me constantly throughout the project work and for his valuable guidance and co-operation.
113 I would like to express my sincere thanks to the Management, VITAM, Visakhapatnam, for providing such a platform for implementing the ideas in our mind. I also grateful to the Teaching and Non-Teaching staff members of The Department of Mechanical Engineering for their valuable suggestions and co-operation.
REFERENCES
[1] HP.SINGH.”Control Of An Autonomous Industrial Fire Fighting Mobile Robot”, DU Journal of Undergraduate Research and Innovation. (2007)
[2] KRISTI KOSASIH, E.MERRY SARTIKA, M.JIMMY HASUGIAN, DANMULIADY, “The Intelligent Fire Fighting Tank Robot”, Electrical Engineering Journal Vol. 1, (2010)
[3] POONAM SANSALE is developed by Intelligent Fire Extinguisher.
[4] RATNESH MALIK, “Fire Fighting Robot : An Approach” , Indian Streams Research Journal Vol.2,Issue.II/March.(2008)
[5] SARAVANAN.P has designed and developed an Integrated Semi- Autonomous Fire Fighting Mobile robot. The Penguin press. New York, United states.(2009)