530
Chapter
I
n 1935, air traffic control was conducted with a
system of teletype machines, wall-sized
black-boards, large table maps, and movable markers
representing airplanes. Today’s radar data
pro-cessing includes an automatic display of aircraft
identification, speed, altitude, and velocity vectors.
A DC-10 plane flying due west at 600 mph
en-ters a region with a steady air current coming from
the southwest at 100 mph. How should the pilot
adjust the airplane’s course and speed to maintain
its original velocity vector? This type of problem is
covered in Section 10.2.
Parametric,
Vector, and Polar
Functions
Section 10.1 Parametric Functions 531
Chapter 10 Overview
The material in this book is generally described as the calculus of a single variable, since it
deals with functions of one independent variable (usually
x
or
t
). In this chapter you will apply
your understanding of single-variable calculus in three kinds of two-variable contexts, enabling
you to analyze some new kinds of curves (parametrically defined and polar) and to analyze
motion in the plane that does not proceed along a straight line. Interestingly enough, this will
not require the tools of multi-variable calculus, which you will probably learn in your next
cal-culus course. We will simply use single-variable calcal-culus in some new and interesting ways.
Parametric Functions
Parametric Curves in the Plane
We reviewed parametrically defined functions in Section 1.4. Instead of defining the
points (
x
,
y
) on a planar curve by relating
y
directly to
x
, we can define both coordinates as
functions of a parameter
t
. The resulting set of points may or may not define
y
as a
func-tion of
x
(that is, the parametric curve might fail the vertical line test).
10.1
What you’ll learn about
• Parametric Curves in the Plane
• Slope and Concavity
• Arc Length
• Cycloids
. . . and why
Parametric equations enable us
to define some interesting and
important curves that would be
difficult or impossible to define in
the form y
f
(x).
EXAMPLE 1
Reviewing Some Parametric Curves
Sketch the parametric curves and identify those which define
y
as a function of
x
. In
each case, eliminate the parameter to find an equation that relates
x
and
y
directly.
(a)
x
cos
t
and
y
sin
t
for
t
in the interval [0, 2
)
(b)
x
3 cos
t
and
y
2 sin
t
for
t
in the interval [0, 4
]
(c)
x
t
and
y
t
2 for
t
in the interval [0, 4]
SOLUTION
(a)
This is probably the best-known parametrization of all. The curve is the unit circle
(Figure 10.1a), and it does not define
y
as a function of
x
. To eliminate the parameter, we
use the identity
cos
t
2sin
t
2
1 to write
x
2y
21.
(b)
This parametrization stretches the unit circle by a factor of 3 horizontally and by a factor
of 2 vertically. The result is an ellipse (Figure 10.1b), which is traced twice as
t
covers the
in-terval [0, 4
]. (In fact, the point (3, 0) is visited three times.) It does not define
y
as a
function of
x
. We use the same identity as in part (a) to write
3
x
22
y
21.
(c)
This parametrization produces a segment of a parabola (Figure 10.1c). It does define
y
as a function of
x
. Since
t
x
2, we write
y
x
22.
Now try Exercise 1.Figure 10.1 A collection of parametric curves (Example 1). Each point (x,y) is determined by parametric functions of t, but only the parametrization in graph (c) determines yas a function of x.
3
–3 –2
(a) y
x
(b)
4 1
– 4 –1
–3 3
1 x
y
2 1
–1 –2
3
–3
(c) y
x
Slope and Concavity
We can analyze the slope and concavity of parametric curves just as we can with
explicitly-defined curves. The slope of the curve is still
dy
dx
, and the concavity still depends on
d
2y
dx
2, so all that is needed is a way of differentiating with respect to
x
when everything
is given in terms of
t
. The required parametric differentiation formulas are straightforward
applications of the Chain Rule.
EXAMPLE 2
Analyzing a Parametric Curve
Consider the curve defined parametrically by
x
t
25 and
y
2 sin
t
for 0
t
.
(a)
Sketch a graph of the curve in the viewing window [
7, 7] by [
4, 4]. Indicate the
direction in which it is traced.
(b)
Find the highest point on the curve. Justify your answer.
(c)
Find all points of inflection on the curve. Justify your answer.
SOLUTION
(a)
The curve is shown in Figure 10.2.
(b)
We seek to maximize
y
as a function of
t
, so we compute
dy
dt
2 cos
t
. Since
dy
dt
is positive for 0
t
2 and negative for
2
t
, the maximum occurs when
t
2. Substituting this
t
value into the parametrization, we find the highest point to be
approximately (
2.533, 2).
(c)
First we compute
d
2y
dx
2.
d
d
y
x
d
d
y
x
/
/
d
d
t
t
2 c
2
o
t
s
t
co
t
s
t
d
dx
2
y
2
d
d
y
x
d
d
t
t
t
sin
t
2
t
3cos
t
2
t
A graph of
y
t
sin
t
2
t
3cos
t
on the interval [0,
] (Figure 10.3)
shows a sign change at
t
2.798386... . Substituting this
t
value into the
parametriza-tion, we find the point of inflection to be approximately (2.831, 0.673).
Now try Exercise 19.
(
sin
t
)(
t
)
(1)(cos
t
)
t
2[0, p] by [– 0.1, 0.1]
Figure 10.3 The graph of d2y
dx2 for theparametric curve in Example 2 shows a sign change at t2.798386 ... , indicating a point of inflection on the curve. (Example 2)
Parametric Differentiation Formulas
If
x
and
y
are both differentiable functions of
t
and if
dx
dt
0, then
d
d
y
x
d
d
x
y
d
d
t
t
.
If
y
dy
dx
is also a differentiable function of
t
, then
d
dx
2
y
2
d
d
x
(
y
)
d
d
y
x
d
d
[image:3.684.212.518.464.571.2]t
t
.
Figure 10.2 The parametric curve defined in Example 2.
6 1
1
– 6 0
–3 3 y
x
Arc Length
Section 10.1 Parametric Functions 533
Here is a third formula based on the same approximation.
EXAMPLE 3
Measuring a Parametric Curve
Find the length of the astroid (Figure 10.5)
x
cos
3t
,
y
sin
3t
,
0
t
2
.
SOLUTION
Solve Analytically
The curve is traced once as
t
goes from 0 to 2
. Because of the
curve’s symmetry with respect to the coordinate axes, its length is four times the length
of the first quadrant portion. We have
(
d
d
x
t
)
2(
3 cos
2t
sin
t
)
29 cos
4t
sin
2t
(
d
d
y
t
)
2(
3 sin
2t
cos
t
)
29 sin
4t
cos
2t
(
d
d
x
t
)
2(
d
d
y
t
)
29
c
o
s
2
t
s
in
2
t
c
o
s
2
t
s
in
2
t
1
9
c
o
s
2t
s
in
2t
3
cos
t
sin
t
.
Thus, the length of the first quadrant portion of the curve is
p20
3
cos
t
sin
t
dt
3
p2 0
cos
t
sin
t dt
costsint0, 0t/23
2
sin
2
t
]
p2 0
usint, ducost dt
3
2
.
The length of the astroid is 4
3
2
6.
Support Numerically
NINT
3
cos
t
sin
t
,
t
, 0, 2
6.
Now try Exercise 29. xy
yf (x)
0 (a, c)
(b, d)
c d
a
√⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯(x )k2 (y )
k2
b xk xk – 1
xk yk Q
[image:4.684.70.575.44.660.2]P
Figure 10.4 The graph of f, approxi-mated by line segments.
Arc Length of a Parametrized Curve
Let
L
be the length of a parametric curve that is traversed exactly once as
t
increases
from
t
1to
t
2.
If
dx
dt
and
dy
dt
are continuous functions of
t
, then
L
t2
t1
(
d
d
x
t
)
2
(
d
d
y
t
)
2
dt.
Cycloids
Suppose that a wheel of radius
a
rolls along a horizontal line without slipping (see
Figure 10.6
. The path traced by a point
P
on the wheel’s edge is a
cycloid
, where
P
is
originally at the origin.
[image:4.684.217.570.312.600.2]x = cos3 t, y = sin3 t, 0 ≤ t ≤ 2p
Figure 10.5 The astroid in Example 3.
y
O
P(x, y)
at
a t
C(at, a)
x
Figure 10.6 The position of P(x,y) on the edge of the wheel when the wheel has turned t radians. (Example 4)
EXAMPLE 4
Finding Parametric Equations for a Cycloid
Find parametric equations for the path of the point
P
in Figure 10.6.
SOLUTION
We suppose that the wheel rolls to the right,
P
being at the origin when the turn angle
t
equals 0. Figure 10.6 shows the wheel after it has turned
t
radians. The base of the wheel is
at distance
at
from the origin. The wheel’s center is at (
at
,
a
, and the coordinates of
P
are
x
at
a
cos
,
y
a
a
sin
.
To express
in terms of
t
, we observe that
t
3
2
2
k
for some integer
k
, so
3
2
t
2
k
.
Thus,
cos
cos
(
3
2
t
2
k
)
sin
t
,
sin
sin
(
3
2
t
2
k
)
cos
t
.
Therefore,
x
at
a
sin
t
a
t
sin
t
,
y
a
a
cos
t
a
1
cos
t
.
Now try Exercise 41.
Investigating Cycloids
Consider the cycloids with parametric equations
x
a
t
sin
t
,
y
a
1
cos
t
,
a
0.
1.
Graph the equations for
a
1, 2, and 3.
2.
Find the
x
-intercepts.
3.
Show that
y
0 for all
t
.
4.
Explain why the arches of a cycloid are congruent.
5.
What is the maximum value of
y
? Where is it attained?
6.
Describe the graph of a cycloid.
EXPLORATION 1
EXAMPLE 5
Finding Length
Find the length of one arch of the cycloid
x
a
t
sin
t
,
y
a
1
cos
t
,
a
0.
[image:5.684.40.569.97.693.2]SOLUTION
Figure 10.7 shows the first arch of the cycloid and part of the next for
a
1. In
Explo-ration 1 you found that the
x
-intercepts occur at
t
equal to multiples of 2
and that the
arches are congruent.
The length of the first arch is
20
(
d
d
x
t
)
2(
d
d
y
t
)
2dt.
continued
Huygens’s Clock
The problem with a pendulum clock whose bob swings in a circular arc is that the frequency of the swing de-pends on the amplitude of the swing. The wider the swing, the longer it takes the bob to return to center.
This does not happen if the bob can be made to swing in a cycloid. In 1673, Christiaan Huygens (1629–1695), the Dutch mathematician, physicist, and astronomer who discovered the rings of Saturn, designed a pendulum clock whose bob would swing in a cycloid. Driven by a need to make accurate determinations of longitude at sea, he hung the bob from a fine wire con-strained by guards that caused it to draw up as it swung away from center. How were the guards shaped? They were cycloids, too.
Guard
cycloid Guardcycloid
Cycloid
[0, 3p] by [–2, 4]
Figure 10.7 The graph of the cycloid
Section 10.1 Parametric Functions 535
We have
(
d
d
x
t
)
2
a
1
cos
t
2a
21
2 cos
t
cos
2t
(
d
d
y
t
)
2a
sin
t
2a
2sin
2t
(
d
d
x
t
)
2(
d
d
y
t
)
2a
2
2
c
o
s
t
.
a0, sin2tcos2t1Therefore,
20
(
d
d
x
t
)
2(
d
d
y
t
)
2dt
a
20
2
2
c
o
s
t
dt
8
a.
Using NINTThe length of one arch of the cycloid is 8
a.
Now try Exercise 43.Use algebra or a trig identity to write an equation relating xand y.
1. xt1 and y2t3 y2x1
2. x3t and y54t33 y2x33
3.xsin t and ycos t x2y21
4.xsin t cos t and ysin(2t) y2x
5.xtan and ysec y21x2
Quick Review 10.1
(For help, go to Appendix A.1.)
6.xcsc and ycot x21y2
7.xcos and ycos(2) y2x21
8.xsin and ycos(2) y12x2
9.xcos and ysin (0 ) y1x2
10.xcos and ysin (2) y 1x2
Section 10.1 Exercises
In Exercises 1–6, sketch the parametric curves and identify those which define yas a function of x. In each case, eliminate the parame-ter to find an equation that relates xand ydirectly.
1.x2t3 and y4t3 for tin the interval [0, 3]
2. xt2 and y t
4 5
for tin the interval [3, 11]
3.xtan t and ysec t for tin the interval [0,
4]4. xsin t and y2 cos t for tin the interval [0,]
5. xsin t and ycos(2t) for tin the interval [0, 2]
6.xsin 6t and y2t for tin the interval [0,
2] In Exercises 7–16, find (a) dydxand (b) d2ydx2in terms of t.7.x4 sint, y2 cost 8. xcost, y3cost
9. x t1, y3t 10. x1
t, y 2lnt11.xt23t, yt3 12. xt2t, yt2t
13. xtan t, ysec t 14.x2cos t, ycos(2t)
15. xln(2t), yln(3t)4
16. xln(5t), ye5t
In Exercises 17–22,
(a) sketch the curve over the given t-interval, indicating the direction in which it is traced,
(b) identify the requested point, and
(c) justify that you have found the requested point by analyzing an appropriate derivative.
17. xt1, yt2t, 2t 2 Lowest point
18. xt22t, yt22t3, 2t 3 Leftmost point
19. x2 sin t, ycos t, 0t Rightmost point
20. xtan t, y2 sec t, 1t 1 Lowest point
21. x2 sin t, ycos(2t), 1.5t 4.5 Highest point
22. xln(5t), yln(4t2), 0t 10 Rightmost point
In Exercises 23–26, find the points at which the tangent line to the curve is (a) horizontal or (b) vertical.
23. x2cost, y 1sint
24. xsect, ytant 25. x2t, yt34t
26. x 23 cost, y13 sint
7. (a)1
2tan t (b) 1 8sec3t 8. (a)3 (b)0
9. (a)
33t (b) t3/23
10. (a)t (b)t2
11. (a)
2t
3
t2
3
(b)6
(2
t2 t
1 3 8 )3
t
12. (a)2
2
t t
1 1
(b)
(2t
4 1)3
13. (a)sin t (b)cos3t 14. (a)2 cos t (b)1
15. (a)4 (b)0
16. (a)5t e5t (b)25t2e5t5t e5t
23. (a)(2, 0) and (2,2) (b)(1,1) and (3,1)
24. (a)Nowhere (b)(1, 0) and (1, 0)
26. (a)(2, 4) and (2,2)
(b)(1, 1) and (5, 1)
25. (a)At t 2 3
, or (0.845,3.079) and (3.155, 3.079) (b)Nowhere
In Exercises 27–34, find the length of the curve. (For an algebraic challenge, try evaluating the integrals without a calculator.)
27. xcos t, ysin t, 0t 2 2
28. x3 sin t, y3 cos t, 0t 3
29. x8 cost8tsint, y8 sint8tcost, 0t
2 230. x2 cos3t, y2 sin3t, 0t 2 12
31. x 2t
3 332
, yt t
2
2
, 0t3 21/2
32. x (8t
12 8)32
, yt2t, 0t 2 10
33. x 1
3t
3, y 1
2t
2, 0t1 22
3
1
0.609
34. xlnsecttantsint, ycost, 0t
3 ln 235. Length is Independent of Parametrization To illustrate
the fact that the numbers we get for length do not usually depend on the way we parametrize our curves, calculate the length of the semicircle y1x2with these two different
parametrizations.
(a) xcos 2t, ysin 2t, 0t
2(b) xsint, ycost, 1
2t1236. Perimeter of an Ellipse Find the length of the ellipse
x3 cost, y4 sint, 0t2.
37. Cartesian Length Formula The graph of a function yfx
over an interval a, bautomatically has the parametrization
xx, yfx, axb.
The parameter in this case is xitself. Show that for this parametrization, the length formula
L
b
a
(
ddxt
)
2(
ddyt)
2dt
reduces to the Cartesian formula
L
b
a
1
(
dd y x
)
2 dxderived in Section 7.4. Just substitute xfor tand note that dx/dx1.
38. (Continuation of Exercise 37) Show that the Cartesian
formula
L
d
c
1
(
dd x y
)
2 dyfor the length of the curve xgy, cyd, from Section 7.4 is a special case of the parametric length formula
L
b
a
(
ddxt
)
2(
ddyt)
2dt.
Exercises 39 and 40 refer to the region bounded by the x-axis and one arch of the cycloid
xatsint, ya1cost
that is shaded in the figure shown at the top of the next column.
39. Find the area of the shaded region. (Hint: dxdx
dtdt) 3a240. Find the volume swept out by revolving the region about the
x-axis. (Hint: dVy2dxy2dx
dtdt) 52a341. Curtate Cycloid Modify Example 4 slightly to find the
parametric equations for the motion of a point in the interiorof a wheel of radius aas the wheel rolls along the horizontal line without slipping. Assume that the point is at distance bfrom the center of the wheel, where 0 ba. This curve, known as a
curtate cycloid,has been used by artisans in designing the arches of violins (Source:mathworld.wolfram.com).
42. Prolate Cycloid Modify Example 4 slightly to find the
parametric equations for the motion of a point on the exteriorof a wheel of radius aas the wheel rolls along the horizontal line without slipping. Assume that the point is at distance bfrom the center of the wheel, where ab2a. This curve, known as a
prolate cycloid,is traced out by a point on the outer edge of a train’s flanged wheel as the train moves along a track. (If you graph a prolate cycloid, you can see why they say that there is always part of a forward-moving train that is moving backwards!)
43. Arc Length Find the length of one arch (that is, the curve
over one period) of the curtate cycloid defined parametrically by
x3t2 sin tand y3 2 cos t. 21.010
44. Arc Length Find the length of one arch (that is, the curve
over one period) of the prolate cycloid defined parametrically by
x2t3 sin tand y2 3 cos t. 21.010
Standardized Test Questions
You should solve the following problems without using a graphing calculator.
45. True or False In a parametrization, if xis a continuous function of tand yis a continuous function of t, then yis a continuous function of x. Justify your answer.
46. True or False If fis a function with domain all real numbers, then the graph of fcan be defined parametrically by xt and
yf(t) for t . Justify your answer.
47. Multiple Choice For which of the following parametrizations of the unit circle will the circle be traversed clockwise? B
(A) xcos t, ysin t, 0t2
(B) xsin t, ycos t, 0t2
(C) x cos t, y sin t, 0t2
(D) x sin t, ycos t, 0t2
(E) xsin t, y cos t, 0t2
2ap x
y
2a
22.103
38.Use the parametrization xg(y),yy,
cyd, substitute yfor tand note dy/dy1.
xatbsin tand yabcos t (0ab)
xatbsin tand yabcos t (ab2a)
45.False. Indeed,ymay not even be a function of x. (See Example 1.)
Section 10.1 Parametric Functions 537
48. Multiple Choice A parametric curve is defined by xsin t
and ycsc t for 0 t
2. This curve is C(A) increasing and concave up.
(B) increasing and concave down.
(C) decreasing and concave up.
(D) decreasing and concave down.
(E) decreasing with a point of inflection.
49. Multiple Choice The parametric curve defined by xln(t),
ytfor t 0 is identical to the graph of the function C
(A) yln x for all real x.
(B) ylnx for x0.
(C) yex for all real x.
(D) yex for x0.
(E) yln(ex) for x0.
50. Multiple Choice The curve parametrized by
x6 sin t3 sin(7t) and y6 cos t3 cos(7t), as shown in the diagram below, is traversed exactly once as t
increases from 0 to 2. The total length of the curve is given by
(A)
20
(6 sint3 sin(7t)) 2(6 cos t3 cos(7t))2dt(B)
20
(6 cost3 cos(7t)) 2(6 sin t3 sin (7t))2dt(C)
20
(6 cost21cos(7t)) 2 (6 sint21sin(7t))2dt(D)
20
(6 cost21cos(7t)) 2 (6 sin t21 sin(7t))2dt(E)
20 7
(6 cost3 cos (7t)) 2(6 sin t3 sin (3t))2dtthe string is tangent to the circle at Q, and tis the radian measure of the angle from the positive x-axis to the segment OQ.
(a)Derive parametric equations for the involute by expressing the coordinates xand yof Pin terms of tfor t0. xcos t
(b)Find the length of the involute for 0t2. 22
52. (Continuation of Exercise 51) Repeat Exercise 51 using the
circle of radius acentered at the origin, x2y2a2.
In Exercises 53–56, a projectile is launched over horizontal ground at an angle with the horizontal and with initial velocity v0ft
sec. Its path is given by the parametric equationsxv0cost, yv0sint16t2.
(a)Find the length of the path traveled by the projectile.
(b)Estimate the maximum height of the projectile.
53. 20°, v0150 54. 30°, v0150
55. 60°, v0150 56. 90°, v0150
Extending the Ideas
If dx
dtand dydtare continuous, the parametric curve defined by (x(t),y(t)) for a t bis called smooth. If the curve is traversed exactly once as tincreases from ato b, and if yis a positive function of x, then the curve can be revolved about the x-axis to form a solid of revolution (see Section 7.3). The surface areaof such a solid is given byS
b
a
2y
(
d d x t)
2(
ddyt)
2dt.
Apply this formula in Exercises 57–60 to find the surface area when the parametric curve is revolved about the x-axis.
57. xcos t, y2sin t, 0t2 82
58. x2t, y(2
3)t32, 0t2 14.21459. xt22, yt1, 0t3 178.561
60. xln(sec ttan t)sin t, ycos t, 0t
3 10–10 –10
2 10
2 –2
x y
x y
O t
P(x, y)
(1, 0) String
1 Q
Explorations
51. Group Activity Involute of a Circle If a string wound around a fixed circle is unwound while being held taut in the plane of the circle, its end Ptraces an involute of the circle as suggested by the diagram below. In the diagram, the circle is the unit circle in the xy-plane, and the initial position of the tracing point is the point 1, 0on the x-axis. The unwound portion of
D
tsin t, ysin ttcos t
(a)xa(cos ttsin t),ya(sin ttcos t) (b)2a2
(a) 461.749 ft (b) 41.125 ft
(a) 840.421 ft (b)16,875/64263.672 ft (a)703.125 ft
(b)5625/16351.5625 ft
(a) 641.236 ft (b)5625/6487.891 ft
Vectors in the Plane
Two-Dimensional Vectors
When an object moves
along a straight line
, its velocity can be determined by a single
num-ber that represents both magnitude and direction (forward if the numnum-ber is positive, backward
if it is negative). The speed of an object moving on a path
in a plane
can still be represented by
a number, but how can we represent its direction when there are an infinite number of
direc-tions possible? Fortunately, we can represent both magnitude and direction with just two
numbers, just as we can represent any point in the plane with just two coordinates (which is
possible essentially for the same reason). This representation is what two-dimensional vectors
were designed to do.
While the pair (
a
,
b
) determines a point in the plane, it also determines a
directed line
segment
(or
arrow
) with its tail at the origin and its head at (
a
,
b
) (Figure 10.8). The length of
this arrow represents magnitude, while the direction in which it points represents direction. In
this way, the ordered pair (
a
,
b
) represents a mathematical object with both magnitude and
di-rection, called the
position vector of (
a
,
b
)
.
10.2
What you’ll learn about
• Two-Dimensional Vectors
• Vector Operations
• Modeling Planar Motion
• Velocity, Acceleration, and
Speed
• Displacement and Distance
Traveled
. . . and why
The jump from one to two
dimen-sions (and eventually higher) is
easier than one might think,
thanks to the mathematics of
vectors.
(a, b)
a, b y
x O
O
(a, b) y
x
Figure 10.8 The point represents the ordered pair (a,b). The arrow (directed line segment) represents the vector a,b.
The distance formula in the plane gives a simple computational formula for magnitude.
DEFINITION
Two-Dimensional Vector
A
two-dimensional vector v
is an ordered pair of real numbers, denoted in
component
form
as
a
,
b
. The numbers
a
and
b
are the
components
of the vector
v
. The
standard
representation
of the vector
a
,
b
is the arrow from the origin to the point (
a
,
b
).
The
magnitude
(or
absolute value
) of
v
, denoted
v
, is the length of the arrow, and the
direction of v
is the direction in which the arrow is pointing. The vector
0
0, 0
,
called the
zero vector
, has zero length and no direction.
Direction can be quantified in several ways; for example, navigators use bearings from
compass points. The simplest choice for us is to measure direction as we do with the
trigonometric functions, using the usual position angle formed with the positive
x
-axis as
the initial ray and the vector as the terminal ray. In this way, every nonzero vector
deter-mines a unique
direction angle
satisfying (in degrees) 0
360 or (in radians)
0
2
. (See Figure 10.10 for an example.)
Magnitude of a Vector
Section 10.2 Vectors in the Plane 539
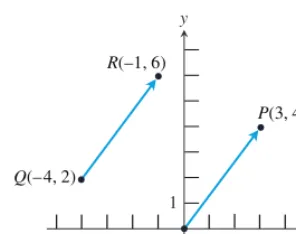
Figure 10.9 The arrows QRand OP
both represent the vector 3, 4, as would any arrow with the same length pointing in the same direction. Such arrows are called
equivalent.
P(3, 4)
O R(–1, 6)
Q(–4, 2)
1 1
x y
Head Minus Tail (HMT) Rule
If an arrow has initial point (
x
1,
y
1) and terminal point (
x
2,
y
2), it represents the
vector
x
2x
1,
y
2y
1.
EXAMPLE 1
Finding Magnitude and Direction
Find the magnitude and the direction angle
of the vector
v
1,
3
(Figure 10.10).
SOLUTION
The magnitude of
v
is
v
(
1
0)
2(
3
0)
22. Using triangle ratios, we see
that the direction angle
satisfies cos
1
2 and sin
3
2, so
120º or 2
3
radians.
Now try Exercise 5.
EXAMPLE 2
Finding Component Form
Find the component form of a vector with magnitude 3 and direction angle 40º.
SOLUTION
The components of the vector, found trigonometrically, are
x
3 cos 40º and
y
3 sin 40º
(Figure 10.11).
The vector is
3 cos 40º, 3 sin 40º
2.298, 1.928
.
Now try Exercise 13.Vector Operations
The algebra of vectors sometimes involves working with vectors and numbers at the same
time. In this context, we refer to the numbers as
scalars
. The two most basic algebraic
opera-tions involving vectors are
vector addition
(adding a vector to a vector) and
scalar
multiplica-tion
(multiplying a vector by a number). Both operations are easily represented geometrically.
v
(
–1, √−3)
u
–2
–2 2
2 x
[image:10.684.54.190.410.539.2]y
Figure 10.10 The vector vin Example 1 is represented by an arrow from the origin to the point
1,3.Why Not Use Slope for Direction?
Notice that slopeis inadequate for de-termining the direction of a vector, since two vectors with the same slope could be pointing in opposite directions. More-over, vectors are still useful in dimen-sions higher than 2, while slope is not.
y = 3 sin 40˚ 40˚
3
x = 3 cos 40˚
–1
3 x y
Figure 10.11 The vector in Example 2 is represented by an arrow from the origin to the point (3 cos 40º, 3 sin 40º).
Direction Angle of a Vector
The
direction angle
of a nonzero vector
v
is the smallest nonnegative angle
formed with the positive
x
-axis as the initial ray and the standard representation
of
v
as the terminal ray.
This textbook uses boldface variables to represent vectors (for example,
u
and
v
) to
dis-tinguish them from numbers. In handwritten form it is customary to disdis-tinguish vector
variables by arrows (for example,
u
and
v
). We also use angled brackets to distinguish a
vector
x
,
y
from a point (
x
,
y
) in the plane, although it is not uncommon to see (
x
,
y
)
used for both, especially in handwritten form.
It is often convenient in applications to represent vectors with arrows that begin at points
other than the origin. The important thing to remember is that
any two arrows with the same
length and pointing in the same direction represent the same vector
. In Figure 10.9, for
ex-ample, the vector
3, 4
is shown represented by
QR
, an arrow with
initial point
Q
and
terminal point
R
, as well as by its standard representation
O
OP
. Two arrows that represent
the same vector are said to be
equivalent
.
The quick way to associate arrows with the vectors they represent is to use the following
rule.
The vector
v
v
is a vector of magnitude 1, called a
unit vector
. Its component form is
cos
, sin
, where
is the direction angle of
v
. For this reason,
v
v
is sometimes called
the
direction vector
of
v
.
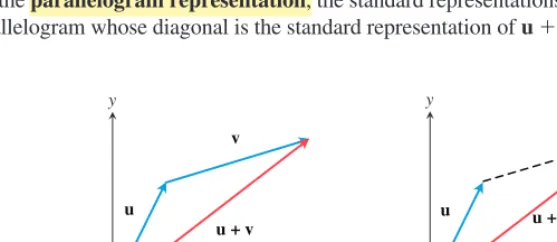
The sum of two vectors
u
and
v
can be represented geometrically by arrows in two ways.
In the
tail-to-head representation
, the arrow from the origin to (
u
1,
u
2) is the standard
repre-sentation of
u
, the arrow from (
u
1,
u
2) to (
u
1v
1,
u
2v
2,) represents
v
(as you can verify by
the HMT Rule), and the arrow from the origin to (
u
1v
1,
u
2v
2) then is the standard
repre-sentation of
u
v
(Figure 10.12a).
In the
parallelogram representation
, the standard representations of
u
and
v
determine
a parallelogram whose diagonal is the standard representation of
u
v
(Figure 10.12b).
v
u u + v
v u
(a) (b)
u + v
x y
[image:11.684.207.566.57.301.2]x y
Figure 10.12 Two ways to represent vector addition geometrically: (a) tail-to-head and (b) parallelogram.
–2 u
u u
2 u
1 _ 2
Figure 10.13 Representations of uand several scalar multiples of u.
The product
k
u
of the scalar
k
and the vector
u
can be represented by a stretch (or shrink)
of
u
by a factor of
k
. If
k
0, then
k
u
points in the same direction as
u
; if
k
0, then
k
u
points in the opposite direction (Figure 10.13).
EXAMPLE 3
Performing Operations on Vectors
Let
u
1, 3
and
v
4, 7
. Find the following.
(a)
2
u
3
v
(b) u
v
(c)
1
2
u
SOLUTION(a)
2
u
3
v
2
1, 3
3
4, 7
2
1
3
4
, 2
3
3
7
10, 27
continued
DEFINITION
Vector Addition and Scalar Multiplication
Let
u
u
1,
u
2and
v
v
1,
v
2be vectors and let
k
be a real number (scalar).
The
sum
(or
resultant
)
of the vectors u and v
is the vector
u
v
u
1v
1,
u
2v
2.
The
product of the scalar
k
and the vector u
is
k
u
k
u
1,
u
2ku
1,
ku
2.
The
opposite of a vector v
is
v
(
1)
v
. We define vector subtraction by
[image:11.684.255.534.375.496.2](b) u
v
1, 3
4, 7
1
4, 3
7
5,
4
(c)
1
2
u
1
2
,
3
2
(
1
2
)
2
(
3
2
)
21
2
1
0
Now try Exercise 21.
Vector operations have many of the properties of their real-number counterparts.
Section 10.2 Vectors in the Plane 541
Modeling Planar Motion
Although vectors are used in many other physical applications, our primary reason for
introducing them into this course is to model the motion of objects moving in a
coordi-nate plane. You may have seen vector problems of the following type in a physics or
mechanics course.
EXAMPLE 4
Finding Ground Speed and Direction
A Boeing
®727
®airplane, flying due east at 500 mph in still air, encounters a 70-mph tail
wind acting in the direction 60º north of east. The airplane holds its compass heading due
east but, because of the wind, acquires a new ground speed and direction. What are they?
SOLUTION
If
u
the velocity of the airplane alone and
v
the velocity of the tail wind, then
u
500 and
v
70 ( Figure 10.14).
We need to find the magnitude and direction of the
resultant vector
uv. If we let the
positive
x
-axis represent east and the positive
y
-axis represent north, then the
compo-nent forms of
u
and
v
are
u
500, 0
and
v
70 cos 60º, 70 sin 60º
35, 35
3
.
Therefore,
u
v
535, 35
3
,
u
v
5
3
5
23
5
3
2
538.4,
and
tan
135
5
35
3
6.5º.
Interpret
The new ground speed of the airplane is about 538.4 mph, and its new
direction is about 6.5º north of east.
Now try Exercise 25.Properties of Vector Operations
Let
u
,v
,w
be vectors and
a
,
b
be scalars.
1. u
v
v
u
2.
u
v
w
u
v
w
3. u
0
u
4. u
u
0
5.
0
u
0
6.
1
u
u
7.
a
b
u
ab
u
8.
a
u
v
a
u
a
v
9.
a
b
u
a
u
b
u
E N
u v
u + v 30
˚
70
500
[image:12.684.213.439.51.128.2]NOT TO SCALE
Figure 10.14 Vectors representing the velocities of the airplane and tail wind in Example 4.
Recall that if the position
x
of an object moving along a line is given as a function of time
t
,
then the velocity of the object is
dx
dt
and the acceleration of the object is
d
2x
dt
2. It is
al-most as simple to relate position, velocity, and acceleration for an object moving in the
plane, because we can model those functions with vectors and treat
the components of the
vectors as separate linear models
. Example 5 shows how simple this modeling actually is.
EXAMPLE 5
Doing Calculus Componentwise
A particle moves in the plane so that its position at any time
t
0 is given by (sin
t
,
t
22).
(a)
Find the position vector of the particle at time
t
.
(b)
Find the velocity vector of the particle at time
t
.
(c)
Find the acceleration of the particle at time
t
.
(d)
Describe the position and motion of the particle at time
t
6.
SOLUTION
(a)
The position vector, which has the same components as the position point, is
sin
t
,
t
22
.
In fact, it could also be represented as (sin
t
,
t
22), since the context would identify it as
a vector.
(b)
Differentiate each component of the position vector to get
cos
t
,
t
.
(c)
Differentiate each component of the velocity vector to get
sin
t
, 1
.
(d)
The particle is at the point (sin 6, 18), with velocity
cos 6, 6
and acceleration
sin 6, 1
.
You can graph the path of this particle parametrically, letting
x
sin(
t
) and
y
t
22. In
Figure 10.15 we show the path of the particle from
t
0 to
t
6. The red arrow at the
point (sin 6, 18) represents the velocity vector (cos 6, 6). It shows both the magnitude and
direction of the velocity at that moment in time.
Now try Exercise 31.Velocity, Acceleration, and Speed
We are now ready to give some definitions.
EXAMPLE 6
Studying Planar Motion
A particle moves in the plane with position vector
r
(
t
)
sin (3
t
), cos (5
t
)
. Find the
velocity and acceleration vectors and determine the path of the particle.
continued
[–2, 2] by [0, 25]
0 ≤ t ≤ 6
cos 6 6
Figure 10.15 The path of the particle in Example 5 from t0 to t6. The red arrow shows the velocity vector at t6.
A Word About Differentiability
Our definitions can be expanded to a
calculus of vectors, in which (for ex-ample) dv
dta(t), but it is not our in-tention to get into that here. We have therefore finessed the fine point of vec-tor differentiability by requiring the path of our particle to be “smooth.” The path can have vertical tangents, fail the vertical line test, and loop back on itself, but corners and cusps are still problematic.DEFINITIONS
Velocity, Speed, Acceleration, and Direction
of Motion
Suppose a particle moves along a smooth curve in the plane so that its position at
any time
t
is (
x
(
t
)),
y
(
t
), where
x
and
y
are differentiable functions of
t
.
1.
The particle’s
position vector
is
r
(
t
)
x
(
t
),
y
(
t
)
.
2.
The particle’s
velocity vector
is
v
(
t
)
d
d
x
t
,
d
d
y
t
.
3.
The particle’s
speed
is the magnitude of
v
, denoted
v
. Speed is a
scalar
, not a
vector.
4.
The particle’s
acceleration vector
is
a
(
t
)
d
dt
2
x
2
,
d
dt
2y
2