o f Urban Spatial Processes
David Bernard O'Sullivan
T he B artlett School of G ra d u a te S tu d ies B artlett School of A rch itectu re a n d P la n n in g U n iv e rsity C ollege L o n d o n
U n iv e rsity of L o n d o n
All rights reserved
INFORMATION TO ALL USERS
The quality of this reproduction is dependent upon the quality of the copy submitted.
In the unlikely event that the author did not send a complete manuscript and there are missing pages, th ese will be noted. Also, if material had to be removed,
a note will indicate the deletion.
uest.
ProQuest 10016145
Published by ProQuest LLC(2016). Copyright of the Dissertation is held by the Author.
All rights reserved.
This work is protected against unauthorized copying under Title 17, United States Code. Microform Edition © ProQuest LLC.
ProQ uest LLC
789 East Eisenhower Parkway P.O. Box 1346
The impact of spatial organisation on the dynamics of spatial change is a topic of great interest in geography. The impact of spatial form is of particular interest m the context of urban systems where the associated issues are most acutely felt.
Various concepts of space and their implications are reviewed. Two existing mathematical concepts — graphs and cellular autom ata — which have been used as representations of spatial systems, are discussed. Examination of the use of these con cepts reveals that in urban models they have usually been applied separately to rep resent, respectively, structural properties, and the behaviour of dynamic processes.
It is suggested that a model which combines aspects of both approaches — the graph-based cellular automaton (graph-CA) — can be introduced. This enables re search into relations between the spatial structure and process dynamics of systems. Conceptual tools for this investigation are discussed, draw ing on previous w ork in cellular autom ata and graph theory. A measure of spatial pattern — spatial informa tion — useful for characterising dynamic behaviour, is developed. The computer im plem entation of these concepts is described, and experiments conducted using it are reported. A tentative finding is that process dynamics can be usefully distinguished according to the extent to which they are robust or fragile under spatial change.
Like m ost research, this thesis owes a great deal to the environm ent in which it was conceived. The m ost heartfelt thanks m ust therefore go to Mike Batty for fostering the collaborative, industrious and stimulating environm ent that the Centre for Advanced Spatial Analysis (CASA) has become, and for his enthusiastic encouragement as my supervisor. I also thank Bill Hillier whose contributions as a supervisor have always been thought-provoking.
Thanks are also due to collaborators, colleagues and friends at CASA: Muki Hak- lay. Bin Jiang, Mark Thurstain-Goodwin, Paul Torrens, Alasdair Turner, Alex Aurigi, Joanna Barros, Ruth Conroy, Jake Desyllas, M artin Dodge, Simon Doyle, Chiron Mot- tram, Sanjay Rana, Sarah Sheppard, N aru Shiode and A ndrew Smith. A special word of thanks also goes to Nick Green and Steve M arshall for alcohol-fuelled evenings of inspiration.
List of Figures 9
List of Tables 12
I
Contexts
13
1 Introduction 14
1.1 O v e rv ie w ... 14
1.2 Detailed outline of the t h e s i s ... 18
1.2.1 Part I: C o n te x ts ... 18
1.2.2 Part II: Model d e v e lo p m e n t... 19
1.2.3 Part III: Application ... 19
2 Space: definitions and models 21 2.1 W hat is sp a c e ? ... 22
2.1.1 Philosophical and physical science co n cep tio ns... 25
2.1.2 Absolute and relational space in geography and C IS ... 26
2.1.3 Cognitive conceptions of s p a c e ... 28
2.2 Space in the present w o rk ... 31
2.2.1 Philosophical basis: critical realism... 32
2.2.2 The proximal model of s p a c e ... 33
2.3 C onclusion... 37
3 Graphs and cellular autom ata 39 3.1 G r a p h s ... 39
3.1.1 Some d e fin itio n s ... 40
3.2 G raph m easures... 45
3.2.1 Centrality and c en tralisa tio n ... 45
3.2.2 Cohesive sub-groups... 50
3.2.3 Structural equivalence ... 53
3.2.4 Small world netw orks and their stru ctu re... 54
3.2.5 Conclusions on g r a p h s ... 55
3.3 Cellular a u to m a ta ... 56
3.3.2 Properties of cellular autom ata ... 58
3.3.3 Cellular autom ata m easu res... 64
3.3.4 Conclusions on cellular a u to m a ta ... 67
3.4 C o n clu sio n s... 67
An overview of urban morphology and micro-scale analysis 69 4.1 A n introduction to urban m o rp h o lo g y ... 70
4.2 Jacobs's polemic and A lexander's analytic critiques of p la n n in g 71
4.3 The analytical planning lite ra tu re ... 73
4.3.1 The 'Cambridge s c h o o l'... 74
4.3.2 Q -a n a ly sis ... 77
4.3.3 Space syntax ... 78
4.4 Urban morphology in geography ... 84
4.4.1 Conzenian urban m orphogenetics... 84
4.5 Recent dynamic models of urban spatial p ro c e s s e s ... 88
4.5.1 CA models and complexity theory in urban d y n a m ic s ... 94
4.6 C o n clu sio n s... 96
II Model Development
99
5 A spatial model combining graphs and cellular automata, and its implications 100 5.1 The basic concept... 1015.1.1 F o rm a lism ... 102
5.2 Two possible lines of research ... 104
5.2.1 Exploring the structure-process relationship ... 104
5.2.2 Extending the GCA m o d e l... 105
5.3 Exploring global structure-process relations in graph-CA m o d e ls 108 5.3.1 The domain of all possible graph-CAs ... 108
5.3.2 Structure-process research using graph structures and discrete d y n a m ic s ... 109
5.3.3 Difficulties of exploring the cell-space of GCA m o d e ls ... 113
5.3.4 Measures of cell space: graph stru c tu re ... 116
5.3.5 Measures of dynamic behaviour: spatial set entropy and spatial inform ation... 118
5.3.6 Summarising spatial information time-series d a t a ... 127
5.4 Discussion and c o n clu sio n s... 132
6 M odel implementation — the graphca program 134 6.1 The graphca p ro g ra m ... 134
6.1.1 Program functionality... 135
6.1.2 Program im p lem en tatio n ... 138
6.2 The graphca packages ... 140
6.2.1 Base classes — the GraphCA. su p ercla sses p a c k a g e ... 143
6.2.2 Graph-CA elements — the GraphCA. gca p a c k a g e ... 148
6.2.4 Displaying the model — the GraphCA. gu i p a c k a g e ... 151
6.2.5 Analysing the model — the G raphC A .analysis package ... 153
6.2.6 Running a m odel many times — the GraphCA. experim ent p a c k a g e ... 157
6.3 C o n clu sio ns... 159
Exploring the structure-process relation using graph-CA models 160 7.1 The cell-space... 160
7.1.1 The effects of edge pair swap deform ation on graph structure . . 162
7.2 Effects of deformations of the grid on the segregation g ra p h -C A 163 7.2.1 Limited deformations of the g r id ... 163
7.2.2 Larger deformations of the g r i d ... 167
7.3 Effect of deformations of the grid on the Game of Life graph-C A 171 7.4 Two further brief stu d ie s... 175
7.5 C o n clu sion s... 179
III Application
181
8 Theories of gentrification and a model 182 8.1 The gentrification lite ra tu re ... 1828.1.1 The rent gap h y p o th e sis... 184
8.1.2 Enter gentrification... 187
8.1.3 O ther explanations of g e n trific a tio n ... 190
8.1.4 Discussion and conclusions: implications for m o d e llin g 192 8.2 Developing a graph-CA model of gentrification... 195
8.2.1 A n abstract m odel of property in v e stm e n t... 195
8.2.2 Location state variables... 195
8.2.3 Cellular transition r u l e s ... 196
8.2.4 Commentary on the m o d e l... 207
8.3 C on clu sio n s... 208
9 Exploring and 'calibrating' the Gentrification m odel 210 9.1 A n extension of graphca: the Gentrification p ro g r a m ... 211
9.1.1 M apping cap ab ility... 211
9.1.2 Generation of different model structures ... 213
9.2 'Calibrating' complex dynamic m o d e ls ... 214
9.3 Behaviour of the m odel on a simple regular s p a c e ... 215
9.3.1 Introduction and in te n t... 215
9.3.2 Simple initial param eter s e ttin g s ... 217
9.3.3 Introducing non-zero settings of kA and k o ... 220
9.4 Probabilistic variation in model b e h a v io u r... 225
9.5 Behaviour of the m odel on other spatial s tru c tu re s ... 227
10 Building a graph-CA model in a real urban setting 234
10.1 The study a r e a ... 234
10.2 'H o x to n 'o n the g ro u n d ... 241
10.3 Data sources for the m o d e l... 246
10.3.1 Spatial d a t a ... 246
10.3.2 Micro-scale property and household d a ta ... 247
10.3.3 Synthetic data sources... 249
10.4 C o n clusio n s... 250
11 Running the Gentrification model of Hoxton 252 11.1 Hoxton graph-CA model structures ... 253
11.1.1 Delaunay triangulation based g r a p h s ... 255
11.1.2 Maximum distance based graphs ... 256
11.1.3 M utual visibility based g ra p h s... 257
11.1.4 Street segment based g r a p h s ... 258
11.1.5 Implications of structural properties for dynamic behaviour . . . 260
11.2 Description of model o u tc o m e s... 261
11.2.1 The Delaunay triangulation based g r a p h ... 261
11.2.2 The maximum distance based g r a p h ... 264
11.2.3 The m utual visibility based g r a p h ... 266
11.2.4 The street segment based g ra p h ... 268
11.2.5 D iscu ssio n ... 268
11.3 Variation of stochastic events in the m o d e l... 273
11.4 Discussion and co n clu sio n s... 276
12 Discussion and conclusions 278 12.1 On 'the difference that space m a k e s '... 278
12.2 Researching complex s y s te m s ... 280
12.3 Geographical theory and geographical models ... 284
12.4 On gentrification... 287
12.5 A nd finally... 289
Bibliography 291 A Program file formats 311 A .l The graphca and Gentrification .gca file f o r m a ts ... 311
A.1.1 The version 2.0 . gca file fo rm a t... 311
A. 1.2 The version 3.0 file form ats... 314
A.2 graphca . r u l transition rule files... 316
1 Sack's conceptualisation of sp a c e ... 23
2 A simple Voronoi partition and v a ria n ts ... 35
3 Proximal models of space based on urban morphological elements . . . . 35
4 A possible spectrum of spatial c o n c e p ts ... 38
5 A typical g r a p h ... 40
6 Examples of g ra p h s ... 42
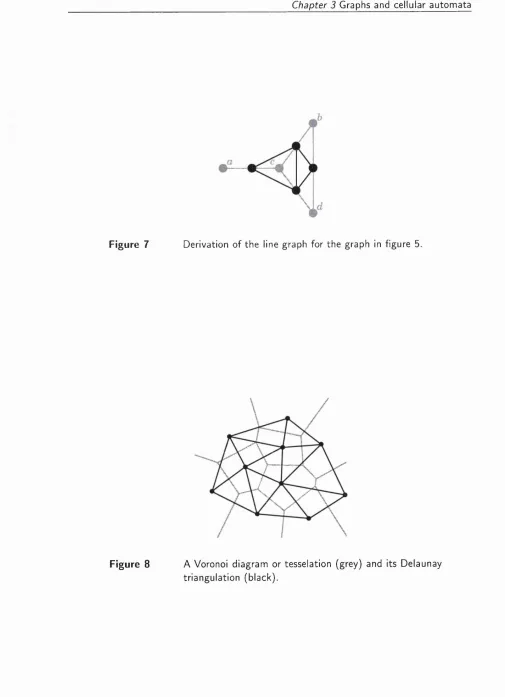
7 Derivation of the line g r a p h ... 44
8 A Voronoi diagram or tesselation and its Delaunay tria n g u la tio n 44 9 Three types of graph structural m e asu re... 46
10 The Game of Life 'glider' c o n fig u ra tio n ... 58
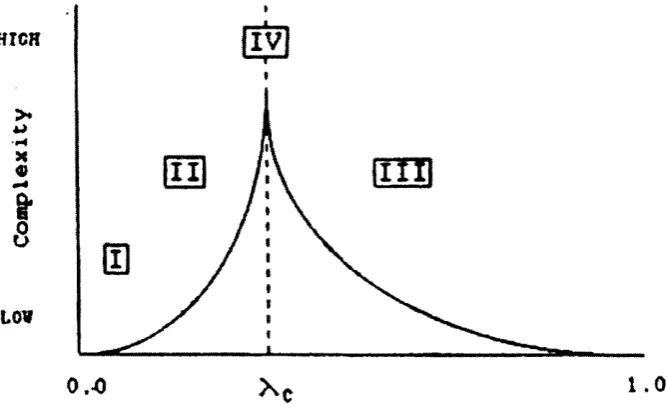
11 Phase transition in CA rule space from class 2 to class 3 behaviour . . . . 61
12 Particles and their interactions in a C A ... 63
13 Use of input entropy to detect a CA's Wolfram c l a s s ... 66
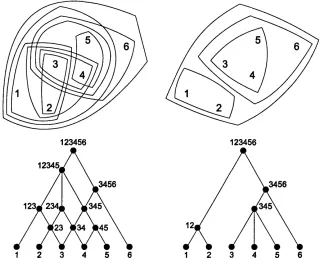
14 A semi-lattice and a t r e e ... 73
15 Typical urban built-form g r a p h s ... 75
16 Typical graphs derived from residential areas of different decades . . . . 76
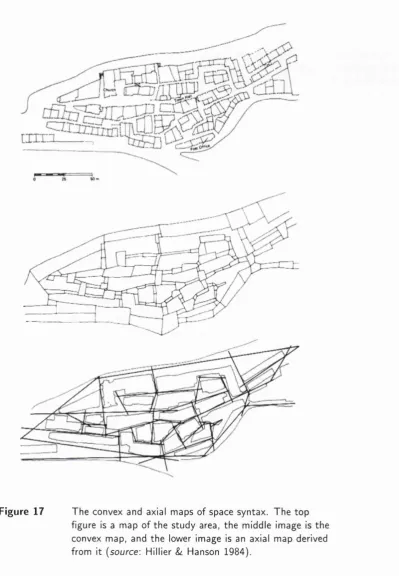
17 The convex and axial maps of space s y n t a x ... 80
18 Urban fringe b e l t s ... 86
19 The burgage c y c le ... 87
20 Land use dynamics in Cincinnati modelled using C A ... 91
21 Urban fractals ... 94
22 The proposed model s tru c tu re ... 101
23 Graph-CA models relative to other discrete m o d els... 107
24 The domain of all possible GCA models — GCA state s p a c e ... 109
25 Deformation of a regular lattice by a random process to produce a small w orld g r a p h ... 112
26 The neighbourhood-preserving edge pair s w a p ... 117
27 Typical spatial information tim e -se rie s... 125
28 The behaviour of the spatial information measure for 3 different spatial p a t t e r n s ... 126
29 Spatial information time-series for the Segregation rule C A ... 128
31 The Kolmogorov-Smimov goodness-of-fit t e s t ... 129
32 Assessment of Life CA time-series against normality ... 131
33 Mean spatial information time-series for the tw o C A s ... 131
34 The graphca p ro g ra m ... 135
35 Key for the class hierarchy d ia g ra m s... 142
36 The graph classes in the GraphCA. s u p e rc la s s e s pack ag e... 144
37 Relationships at run-time between the graph classes... 145
38 T h e G U I classes in GraphCA. s u p e r c l a s s e s ... 146
39 The Graphe A. s u p e rc la s se s thread c lasses... 147
40 Dynamic behaviour of the graphca thread c lasses... 147
41 The GraphCA. gca package class hierarchy ... 149
42 The Graphe A. ca package class hierarchy ... 150
43 The GraphCA. gui package class hierarchy ... 151
44 The Graphe A. a n a ly s is package class hierarchy... 153
45 A typical plot in use: the G C A EntropyTim eSeriesPlot... 155
46 Typical scatter plot produced by the analysis tools ... 156
47 The GraphCA. experim ent package class hierarchy... 157
48 The Experim entD ialog class in u s e ... 158
49 The toroidal grid graph represented in three-dimensional s p a c e 161 50 GCA-space trajectories in terms of characteristic path length and clus tering co efficien t... 162
51 Centrality and clustering coefficient u nder edge pair swap deformation 164 52 The effect of limited deformation on the spatial information time-series for the segregation G C A ... 165
53 The effect of deformation on the final value of spatial information at tained by the segregation GCA ... 166
54 A num ber of GCA-space trajectories for the segregation transition rule 167 55 Further deformation of the segregation GCA cell sp ace... 168
56 The 500 edge pair sw apped graph time-series b e h a v io u r... 169
57 The evolution of configurations 17 and 9 on the 500 edge pair sw apped g r a p h ... 170
58 Average spatial information for the Life GCA under d efo rm a tio n 172 59 Spatial information time-series w ith three different transient times . . . . 173
60 Effect of deformation on the distribution of transient times for the Life G C A ... 174
61 Summary statistics for changes in transient time as the Life GCA cell space is d e fo rm e d ... 174
62 The two graphs examined in this section ... 176
63 Typical segregation outcome on the Delaunay grid g ra p h ... 177
64 10 typical outcomes on the random Delaunay g r a p h ... 178
65 The rent gap h y p o th e sis ... 185
68 The decision to move out in the Gentrification m o d e l... 202
69 The income of new occupants in the Gentrification m o d e l ... 203
70 The decision to provide a loan in the Gentrification m o d e l... 204
71 Program code which implements the Gentrification m odel ... 206
72 The Gentrification model developm ent of the graphca p ro g r a m ... 212
73 The test m odel space used to determ ine suitable m odel param eters . . . 216
74 Model configurations at i = 50 for simple param eter settin g s... 217
75 State space diagram for simple param eter settings... 219
76 The effect of non-zero kA and k c (sta tic )... 221
77 The effect of non-zero A:a and ko (dynamic - part 1 ) ... 223
78 The effect of non-zero kA and k o (dynamic - p art 2 ) ... 224
79 Effect of changing the random num ber seed for other m odel param eters 226 80 Five different graph stru c tu re s... 228
81 Outcome at i = 50 for the five different graph structures ... 229
82 State space behaviour of the five different graph s tr u c tu r e s ... 231
83 Hackney location map ... 235
84 Hackney and its n eig h b o u rs... 236
85 Relative deprivation in H a c k n e y ... 237
86 The Hoxton study area in c o n te x t... 238
87 The model study area w ith major streets m a rk e d ... 239
88 The entrance to SPACE studios in Hoxton R o ad... 242
89 The SPACE studio building and neighbouring former furniture factory 242 90 The upw ardly mobile in Hoxton Road... 243
91 ... and the prices they're p a y in g ... 243
92 The Bean café. Curtain Road ... 244
93 The Lux cinema, Hoxton S q u a r e ... 244
94 Signs of resentment in H o x to n ... 245
95 A boarded up café in Hoxton S q u are ... 245
96 Initial distribution of values in the Hoxton m o d e l... 250
97 Small w orld measures for the various m odel graph stru c tu re s ... 254
98 The Delaunay triangulated graph s tr u c tu r e ... 255
99 The graph based on a m aximum distance c rite rio n ... 256
100 The graph based on a m utual visibility c r ite r io n ... 257
101 The graph based on street s e g m e n ts ... 259
102 Evolution from t = 0 to f = 50 on the Delaunay g r a p h ... 262
103 Evolution from f = 75 to < = 300 on the Delaunay g ra p h ... 263
104 Evolution from ^ = 50 to f = 300 on the maximum distance g ra p h 265 105 Evolution from t = 50 t o t = 300 on the m utual visibility g ra p h 267 106 Evolution from t = 50 t o t = 300 on the street segment g ra p h ... 269
107 Characteristic path lengths for the four m odel s tru c tu re s ... 271
108 The effect of varying m odel p a ra m e te rs ... 272
109 Effect of different Delaunay m odel h isto rie s... 274
1 Some spatial term inologies... 24
2 The effect of different neighbourhood sizes on a CA r u l e ... 115
3 Sample calculation of Wolfram's spatial set e n t r o p y ... 119
Introduction
"It is only shallow people w ho do not judge by appearances. The true mystery of the world is the visible not the invisible..." (Os car Wilde, quoted in Keiller 1999, page 5)
1.1
Overview
The "urban environment" now extends across distance and time to encompass (al most) the globe. The flows of financial information and of capital across time-zones and continents are managed from only a few w orld cities. M uch of the w orld's w ealth originates outside cities, in oil, mineral and agricultural resources, yet in exorably finds it w ay to them, so that perhaps fifty or a hundred cities worldw ide dom inate w orld markets, economies, politics and futures. The dramatic increases in urban sizes w itnessed in the old w orld, in the nineteenth and tw entieth centuries, are being played out on a scale orders of m agnitude greater in the developing world today. A nd just as the industrial city dom inated the tw entieth century, the "infor mational city" looks set to dominate the twenty-first. Even as that transformation changes the meaning of the w ord "city", there is little sign that the "new economy" is going to make much difference to the pre-eminence of densely populated urban regions, across many spheres of hum an activity.
well those buildings and streets w ork to prom ote and sustain the activities of urban life is vital to the welfare of any city. The relationships betw een the city as a sin gle coordinated whole, w ith a role in some w ider regional, national or global order, and the m undane pieces of 'stuff' — bricks and m ortar — which constitute its visible elements are elusive, and a constant concern of urban planners and architects. The effects which form has on function, the visible on the invisible, the spatial structure on system dynamics are im portant concerns for those w ho w ish to design cities. M oudon (1997, page 11) gives a good indication of the approaches which will concern us here:
"1. U rban form is defined by three fundam ental physical elements: build ings and their related open spaces, plots or lots, and streets.
"2. U rban form can be understood at different levels of resolution. Commonly four are recognised, corresponding to the building/lot, the street/block, the city and the region.
"3. U rban form can only be understood historically since the elements of w hich it is com prised undergo continuous transform ation and replace ment.
"Thus form, resolution, and time constitute the three fundam ental com ponents of urban morphological research."
These issues — at this scale — increasingly concern geographers too, as new tech nologies and rich data sources enable new ways of exploring and attem pting to un derstand these relationships at scales from the local to the global.
The present w ork seeks to explore these elem ents and their relationships by com bining tw o m athem atical tools — graphs and cellular autom ata (CA) — to represent different aspects of change in cities. The resulting m odel is a suitable vehicle for inves tigating the relations betw een aspects of the visible and invisible in cities, understood as structure and dynamics. The approach also enables exploration of the effects of spa tial structure on spatial dynamics in a general sense, and this is the major focus of the thesis.
vertices ('nodes') and the pattern of relations as edges ('links'). G raph theoretical mea sures of the resulting representation allow its structural features to be determ ined and described w ith some precision. This sort of approach appears repeatedly in the ur ban m orphology literature. Alexander (1964,1965), Atkin (1974c), Hillier & H anson
(1984), Krafta (1994, 1996), Kruger {1979a,b), M artin & March (1972) and Steadman (1983) all provide examples of the use of graph-based structural measures to accu rately represent or describe various aspects of urban spatial structure, understood at the micro-scale of the elements to which M oudon refers. However, these methods remain resolutely static.
Cellular autom ata are simple — usually grid-based — formal systems, in which dynamic change is represented grid-cell by grid-cell, as a simple deterministic m ap ping from the current state of a cell and its neighbours to the state which the cell will change to next. A CA m odel of a city focuses on dynamics and can be used to investigate urban dynamics and processes of change (Batty & Xie 1996, Couclelis 1985, Xie 1996). This has become an increasingly common modelling approach, and has been used to some effect in post-dieting the grow th of urban areas (Clarke, Hop- pen & Gaydos 1997, White & Engelen 1997, are useful, near operational examples). Among the many advantages of CA models are the simplicity of their construction, their evocation of the relationship between local and global changes, and the fact that they can achieve all this w ithout calling on the whole apparatus of gravity models, spatial interaction models, and the like (Batty 1976b, see). In m ost cases, however, a CA representation does not attend to the detail of the urban spatial arrangem ent, and depends on the introduction of layers of abstraction betw een elements of the visible urban fabric, and the grid cells required by the formalism.
overall system dynamics. This can be seen as a contribution to general ideas on spatial dynamics, and as a new angle on persistent concerns in geographical modelling w ith understanding the general relationships which m ay hold betw een spatial structure, spatial dynamics, and spatial outcomes. This investigation is pursued at a general level in p art II and in relation to a specific model of a particular urban process in part III.
This same framework might also enable a more systematic developm ent of nu merous variants of the CA theme in urban modelling, in a less ad hoc m anner than hitherto. In time this may allow more systematic thinking about the relationships betw een the properties and behaviour of wholly abstract cellular urban models and their increasingly distant near-operational cousins. The potential for developing de tailed CA models which are 'aw are' of their spatial structure (through graph theoretic measures) is also promising. After all, the wholly local character of evolution in strict CA is som ewhat unconvincing — since the agents of change in urban settings, prop erty developers, retailers, commercial interests and city w ide authorities are usually free to effect change anywhere in a city as they see fit, and are not constrained solely by local considerations. By building detailed graph-CA representations of the urban structure, it may become possible to develop more subtle models of urban processes than has been attem pted hitherto. A possible benefit of this approach is that regions w ithin a city modelled in this way can be structurally described and related to each other. That is, similar regions can be identified and examined to see if they evolve in similar ways. This is one aspect of an exploration of the relationship between spatial forms or structure and system dynamics which is enabled by this model framework, although it is not a focus of this thesis. Possibly, subtle formations not previously de scribed could be found. This in turn m ight allow the developm ent of new theoretical ideas about developm ent processes in cities.
developed is described, and chapter 7 reports some experiments which demonstrate a methodology for exploring spatial dynamics using these ideas and tools. In part m this modelling environment is further developed and its application to the gen trification phenom enon is described over four chapters dealing respectively w ith the theoretical background to gentrification, m odel exploration, a description of the case study area, and a description of model outcomes. The thesis concludes in chapter 12 w ith a review of many of the findings of this work, and a discussion of some of their implications.
1.2
Detailed outline of the thesis
1.2.1 Part I; Contexts
Chapter 2 considers the "problem' of space — w hat it is philosophically, and practi cally — and how it has been represented in geography, and in geographical informa tion systems (CIS) and geographical information science (GISci), in particular.^ The intention here is to establish a theoretical and philosophical basis for the current work. The chapter finishes w ith a consideration of more recent treatments of space, partic ularly proximal space. This lays the foundations for a connection to be established between graph representations and cellular autom ata as different spatial representa tions.
Chapter 3 is an overview of both graphs and cellular autom ata w hich are classic representations of any (not necessarily spatial) system. Particular attention is draw n to how these alternative representations m ay shed light on, respectively, the 'static' (structural) and 'dynam ic' (emergent behavioural) aspects of situations.
Chapter 4 reviews the micro-scale, predom inantly technical, urban morphology and modelling literature to give an idea of the w ays in which different representa tions of space and spatial relations have been used to understand city form and func tion. Consideration of this literature dem onstrates how the static and dynamic views of urban form have often been separate, and related to, respectively, the architec tu ra l/ planning and geographical / historical approaches to the subject. This further reinforces the message of chapter 3 concerning the often separate views taken of
tial form as distinct from process.
1.2.2 Part II: Model development
Building on the material in the previous chapters, chapter 5 describes the proposed new spatial model, combining both graph and cellular autom ata ideas — the graph- CA or irregular CA — which allows the structure and dynamics of spatial processes to be examined together. This chapter also develops the methodologies used in the remainder of part II to pursue this type of investigation.
C hapter 6 is something of a digression, which describes the overall architecture of the modelling environment which has been developed for exploring the ideas of the previous chapter, and (in an extended form) for building an application of the graph-CA model in part III.
C hapter 7 reports experimental investigations of the graph-CA model, intended to uncover some general properties of dynamic spatial systems. Some tentative con clusions are draw n from this research.
1.2.3 Part III: Application
Chapter 8 is an overview of research and theory in the field of gentrification studies, which is an essential prelude to the application of the graph-CA model framework to that topic. Gentrification has only rarely been m odelled in spite of its significance in the recent urban geography literature. This review draw s out some of the more promising ideas on which a graph-CA m odel m ight be based, particularly Smith's (1979b) rent gap hypothesis. The rent gap is then operationalised as the basis for the Gentrification model, the mechanics of which are described in detail.
In chapter 9 this m odel is explored in a small abstract grid-based environment, in order to develop a feel for its spatial operation and dynamics. This leads to a 'reasonable' set of param eter settings for the model, which are used w hen it is applied to the real w orld case study.
ration, which is the current intent.
Chapter 11 describes the behaviour of the Gentrification m odel of Hoxton, for a limited range of cases. The focus here is still on the effects of spatial structure on spatial dynamics, and in particular on the different w ays in which the relevant spatial relations m ight be conceptualised. Thus, even though the application of the model remains fairly abstract, its practicability and usefulness as a vehicle for developing intuitions and raising research questions is nevertheless dem onstrated.
Space: definitions and models
W hatever else they may be, one of the m ost im portant aspects of cities is how they organise space for economic, social, political and other purposes. Harvey (1973, page 23) says that
"[a]ny general theory of the city m ust somehow relate the social processes in the city to the spatial form which the city assumes."
This is easily said, and clearly correct, bu t not so easily achieved! Hence, under standing the spatial form of cities, m ust be central to investigations into their function and growth. Furthermore, any such investigations m ust be based on some sort of con ceptualisation of the nature of space.
This chapter examines this problem in term s of the difficulties of conceptualis ing space. This is because the current w ork is prim arily concerned w ith develop ing a methodology for investigating the spatial aspects of social processes in the city. This might be described as a contribution to the developm ent of w hat Harvey terms 'spatial consciousness' in sociological thought. Hillier (1996) has used the phrase 'd e veloping tools to think w ith' (echoing the title of W addington's, 1977 book) and this seems to describe a similar process and need.
2.1
W hat is space?
W hatever space is, it is everywhere these days! Urban space, geographic space, archi tectural space, virtual space, cyberspace — that old chestnut — or information space, body space, m ental space, cognitive space, "the space of flows", geographic space, psy chological space, dream space, symbolic space... the list is potentially endless. The sheer multiplicity of spaces in contem porary academic discourse is overwhelming (Benko & Strohmayer 1997, Soja 1989, for example). Lefebvre (1991) suggests that this multiplication of spaces began after Kant"s designation of space as a synthetic a pri ori, an essential structuring framework for any knowledge, and therefore essentially ungraspable. Space was thereby left to the mathematicians and physical scientists to use as an explanatory aspect of nature — an attribute of things which may serve to explain behaviour. The mathematicians proceeded to invent ""an "indefinity" [... ] of spaces: non-EucHdean spaces, curved spaces, n-dim ensional spaces [...] and so on.'" (Lefebvre 1991, page 2).^ This "indefinity" prom pted philosophers to ponder w hat such an array of spaces might mean, and so space became a mental construct rather than a thing in itself. This also clouded the m apping betw een hum an understanding (knowledge) of phenomena, and the phenom ena themselves: if so m any spaces were possible, indeed existed, how could any of them function as a basis for the under standing of the phenom ena which unfolded in space?
Arguably, we are no further on now than then. The contem porary multiplicity of spaces is a reflection of the confusion in the concept, and, in some contexts, of its near meaninglessness. For my current purposes, this is not really a problem. The im portant step is to attem pt to classify approaches to space, and to then choose some ensemble of approaches which matches our purpose. Such a choice can then be made w ith some awareness of the chosen approach's advantages and limitations.
Sack (1980) investigates spatial concepts at some length, and produces a categori sation which is w orth examining further, before we consider the approach adopted in the current w ork in more detail. Sack's framework is useful in locating different approaches to space, and in understanding their overlaps, differences and relation ships. It also hints at which kinds of approach to space m ay be appropriate in trying to understand different kinds of spatial phenomena. Figure 1 is based on a diagram
SPACE O B J E C T Physical science Artistic domain domain I V I T Y 8 U B J E C T I V I T Y SUBSTANCE
F igure 1 Sack’s (1980) conceptual surface of space.
presented by Sack. He contends that different conceptions of space may be char acterised by the extent to which they separate space from substance, and by their location along a spectrum from objective to subjective views. He is careful to state that "the objective end of the axis should be thought of as containing elements of the subjective and vice versa." (Sack 1980, page 24), so that there is no such thing as an entirely objective, nor entirely subjective view of space.
1992, page 285, note 47) for a very abstract sort of realism, in that his rather schematic review of spatial concepts fails to relate any of the concepts to the social or political contexts in which they have been developed. This criticism seems to be well founded. However, for m y current purpose it is unim portant, since Sack's contribution is to provide a framework for organising ideas about space.
Returning to figure 1, Sack argues that the more abstract the thinking we are doing about space, then the greater the extent of the conceptual surface. Thus, ab stract conceptual systems are more reflective and more aware of their position in this framework. In contrast, unsophisticated spatial thinking — say a child's view of the world — is incapable of accommodating the more abstract thought systems of sci ence or art. Sack goes on to consider the various general positions on this surface. He describes scientific, social scientific, the childhood, the practical, and the mythi cal/m agical views of space. The picture which emerges is of a multiplicity of spatial concepts, each w ith its distinctive taxonomy of spatial elements. Couclelis (1992a) draw s on Sack's w ork to produce a useful enum eration of these taxonomies as they relate to some of the more prevalent geographic approaches to space (see table 1).
Sack and Couclelis are both particularly interested in the socio-economic con ception of space. Sack's approach draw s attention to the particular complexity of this domain, given its position in the conceptual space, encompassing both scien tific/objective and experiential/objective modes. This complexity is missing from the 'socio-economic' column in Couclelis's scheme, which focuses on more analytic accounts in socio-economic theory, but is implied by her inclusion of two further columns enum erating elements in allied domains. A lthough this taxonomy is clearly not (or could not be?) complete, it does at least give a good sense of the way in which different conceptions of space may influence subsequent analysis and discussion, and
M athematical Socio-economic Behavioural Experiential Point Line Area Plane Configuration Location Route Region Plain Distribution Landm ark Path District Environment Spatial layout Place Way Territory Domain World
are therefore significant. In the sections which follow 1 consider some of these spatial concepts in turn, before outlining a general fram ework used in the remainder of this work.
2.1.1 Philosophical and physical science conceptions
Preceding m uch of the debate in other fields of enquiry is the philosophical debate concerning space. This is not an area which 1 w ish to explore in great detail, since it has only limited relevance to space as it exists in terrestrial cases. However, it is in philosophical enquiry that the substance-space axis of Sack's conceptual space is most pertinent. The point of contention has always been w hether space exists in and of itself, external to objects (or substance) which exist in space. This debate seems to be essentially unresolvable. Indeed it remained unresolved (or at any rate, there was no philosophical consensus) until the years after N ew ton's theory of gravity and his contributions to 'natural philosophy'.
N ew ton proposed an absolute model of space, in which space is conceived as an effectively em pty container in which objects are located. Object locations can be described relative to some fixed frame of reference using a co-ordinate system. Thus,
"It is not true that a Vacuum is nothing; it is the Place of Bodies; it is Space; it hath Properties; it is extended in Length, Breadth and D epth,... " (Voltaire 1738; 1967, page 180)
Leibniz, on the other hand proposed a relational m odel of space in which space only has meaning as a way of describing relations betw een objects. Space has no ex istence independent of objects. Eventually, for the essentially pragm atic reason that N ew ton's model w orked, the absolute view of space was to dom inate scientific and philosophic conceptions of space until the tw entieth century (Gray 1989, pages 177- 178). Such absolute views of space hold a great deal of sway in Western culture and thought. As an example. Western concepts about land and land-ownership are based on the idea of the possibility of defining divisions of land w ith reference to some exter nal and fixed frame of reference — a Newtonian view. Kant's previously mentioned definition of space as a synthetic a priori, a conceptual category used by the mind to order concepts, canonised this approach (Sklar 1974).
"There is no such thing as em pty space, i.e. space w ithout field. Space time does not claim existence on its own, b u t only as a structural quality of the field." (quoted in Couclelis 1992b, page 70)
The impact of Einstein's theories and mathematical abstractions of space on phi losophy has been profound, so m uch so that the current m ainstream philosophical w isdom points to relational Leibnizian conceptions (Grunbaum 1970, Reichenbach 1958, Sklar 1974). Nevertheless, a spirited debate continues and Nerlich (1994) makes a coherent argum ent for the independent existence of space. By draw ing on ideas from topology and relativity theory, he argues that space exists and is manifest in the m anner in which 'the shape of space' constrains the kinds of spatial configurations of objects which are possible. A flavour of the argum ents is provided by thinking about w hat it is that makes a right hand different from a left hand. Those w ho argue for the relational view claim that it is the relation of the hand to the body, whereas Nerlich argues that it is the topological relations betw een parts of the hands. The argum ent then boils dow n to w hether or not it is some property of space itself which makes 'handedness' possible.
2.1.2 Absolute and relational space in geography and GIS
The academic nature of such philosophical argum ents at the terrestrial scale of ge ography, urban planning and architecture is apparent. All the same, echoes of these debates are to be heard even there.^
Concepts of space are fundam ental to geography and hence to geographical in formation systems (GIS) and geographical information science (GISci). The conceptu alisation of space was particularly contested in geography in the 'quantitative revo lution' of the 1960s. At that time, an attem pt to place geography on a more 'scientific' footing was m ade (Chorley & H aggett 1967, H aggett 1979, H aggett & Chorley 1969, Harvey 1969, for example). Geography was to move from description of the particu lar to prediction or modelling of general patterns in spatial activity. This introduced a tension into geography, between those w ho rem ained focused on understanding the
particularity of given situations or regions, and those concerned to build largely ab stract models of spatial processes, and thus to build geographical theories of general applicability. Such models were almost invariably built on mathematical — specifi cally geometric — concepts about space, and the closely related socio-economic con cepts listed in table 1.
This tension can be characterised as a conflict betw een an absolute and a re lational m odel of space. H artshom e (1961) makes the connections between m id tw entieth century geography and K ant's view of space explicit. Where history's in terest is in chronology, geography's is in 'chorography'; and where the historian fo cuses on arbitrarily defined periods in history, the geographer focuses on the region, an arbitrarily defined spatial unit, which can nevertheless be usefully examined in isolation. This approach is necessarily based on an absolute view of space, as the connection with Kant makes clear.
In contrast, the spatial processes approach of quantitative geography results in models in which distance is best represented by a variety of metrics. The appropriate metric depends on the problem under investigation (Harvey 1969, page 210). This insight arises fairly quickly in the economic-geography of location analysis where it is natural to think of distance as a cost which is clearly non-isotropic, and therefore not in principle compatible w ith an absolute m odel of space. The 'discovery', or at any rate application, of various metrics is in some ways comparable to the m athe maticians' derivation of alternatives to Euclidean geometry in the nineteenth century, and seems to have had a similarly confusing impact on geography as a discipline. As compensation, geographers started to appreciate the m ultiple w ays in which any spatial problem can be approached. These debates continue today, as can be seen in a theme issue of Environment and Planning A (Philo 1998), and in an entertaining — if depressingly bad-tem pered — exchange betw een O penshaw (1991, 1992) and Taylor & Overton (1991).
is arguable — many w ould view the raster-vector debate as being about no more than technical and pragmatic issues of system im plem entation — and in more recent work Couclelis (1997) seems to change her view, im plying that raster and vector GISs are both rooted in an absolute conception of space, as evidenced by their common re liance on the geo-referenced location. Seen from the perspective of the philosophical and scientific debates outlined in the previous section, the raster and vector views seem to be more usefully distinguished in term s of their positions relative to Sack's substance-space axis. Thus, vector models regard space as em pty w ith distinct ob jects at definable locations, whereas raster models have continuously variable space which has substance at all locations (in the sense that it has measurable attributes at all locations). It is ironic that most GISs should em body an absolute model of space, given their origins in the distinctly relational spatial concepts of the quantitative ge ography tradition. However, it is difficult to conceive of a GIS im plementation which does not rely at some (low) level on an absolute conception of space, in that it is by relating phenom ena to some metric frame that a GIS distinguishes itself from other information systems.
The real issue is w hat spatial m odel is built on top of the underlying reference frame. C urrent GISs often do little more than identify trivial topological relations betw een polygons, edges and points, thus embodying the mathematical (and, to an extent) socio-economic concepts of table 1. In the next section more recent approaches w ithin GISci research which attem pt to incorporate some of the conceptions of space tow ards the subjective end of Sack's scheme are considered.
2.1.3 Cognitive conceptions of space
lective image of the city: "There seems to be a public image of the city which is the overlap of m any individual images." (Lynch 1960, page 46)
Lynch's public images of the city were presented as maps consisting of five major elements: paths, nodes, landmarks, edges, and districts (compare Couclelis's behavioural taxonomy in table 1). Such a division of urban space is clearly at some remove from an 'objective' approach based on land parcels, buildings and administrative or census boundaries. The subsequent impact of Lynch's w ork on urban planning has proba bly been less significant than on geography, environmental psychology and artificial intelligence. Tuan (1977) presents a geographic approach to space which is sensitive to the 'the perspective of experience'. It is not clear that such an approach can be reconciled w ith any one approach to space, as the m any works on this theme in 'h u manistic geography' attest (see Entrikin 1991, for example). However, this is not the point; rather, it is that as we move towards the subjective end of Sack's conceptual surface, conceptions of space rapidly multiply.
Even from the more empirical perspective of behavioural geography it is clear that the multiplication of spaces is inevitable. Golledge & Stimson (1997, pages 224?- 266) provide a comprehensive overview of the behavioural approach in geography and the im portance of the cognitive map concept is acknowledged. Determining ways of actually draw ing individual or collective cognitive m aps was a major focus, and in some cases led to the refinement of new m ethods such as multi-dimensional scaling. A nother focus was to substitute distances as m easured on cognitive maps into behavioural models and compare the outcomes to those obtained using Eu clidean distances. A variety of relations betw een objective measures of distance and perceived distance have been found (Sadalla & Magel 1980, Sadalla & Staplin 1980, for example). This w ork clearly involves the investigation of non-Euclidean spaces, but no generally applicable alternative geometry has been found. As a result these spaces are invariably relational spaces.
Moving from perceived spatial relations to perceptual space itself, Couclelis (1992^7) outlines a taxonomy of perceptual space w hich may assist in discussing these concepts. She suggests that four spaces may be distinguished based largely on actual object scale:
1. A-spaces are those which contain everyday objects (table-top space).
2. B-spaces contain larger everyday objects, which m ust be assembled from m ulti ple views.
3. C-spaces contain landscapes perceivable from a single-point b u t "otherwise not directly accessible to sensorimotor experience." (Couclelis 1992b, page 72). 4. D-spaces are regions beyond any direct experience, and seem to be equated with
the m ental spaces of cognitive maps.
Another classification, suggested by Montello (1993), also proposes four types of space, distinguished this time by the projective size of the space relative to the observer (that is, not by the actual extent of the space):
1. a figurai space is smaller in projection than the hum an body. This has commonly been called 'table-top' space, and is a scale at which the properties of objects may be apprehended by m anipulation and examination from all angles.
2. a vista! space is larger than the hum an body bu t may be "visually appre
hended from a single location w ithout appreciable locomotion" (Montello 1993, page 315). The external form of a house (or an elephant) exists in a vistal space.
3. environmental space is projectively larger than the body, and surrounds it. It can not be fully understood w ithout moving around in it. This is the space in which neighbourhoods and cities exist.
4. geographical space is much larger than the body, so much so that it cannot readily be appreciated even by large scale movement. This is the space of countries and continents, which are often only appreciated by their reduction to vistal or figurai spaces by means of, respectively, vantage points or maps.
point is not to choose any one of these classifications as 'correct' bu t to note how in moving tow ards the subjective we find many alternative conceptions of space. It is clear that cities as vistal/environm ental spaces (to use M ontello's classification) are exemplars of the need for such multiple conceptions of space in social science.
As an example of where cognitive models of space m ight lead in the GIS set ting, Gold (1992) and Edwards (1993) both propose a topological model based on neighbourhoods derived using Voronoi proximity polygons (Okabe, Boots & Sugi- hara 1994). Crucially, for these writers, the resulting mathematically-based model has cognitive resonance:
"[inexperienced users] find the [spatial relations implied by the Voronoi model] to be consistent w ith their common sense. While in no way a proper psychological study, I find this easy grasp of concept suggestive of similarity w ith underlying hum an thought processes." (Gold 1992, page 227)
and
"the Voronoi model of space is closer to a 'qualitative' view of space than existing models used by GIS." (Edwards 1993, page 204)
One of the ideas behind the current w ork is to use ideas and concepts in the urban morphology literature as another source of new spatial models for GISci. This thrust will become clearer in part III where I build a spatial model in a particular application and study area. Some of the relevant concepts from urban morphology are reviewed in section 4.3 (pages 73ff.).
2.2
Space in the present work
2.2.1 Philosophical basis:
critical realism
Like Sack, I am a realist. The most persuasive account of a realist philosophy for me is Collier's (1994) presentation of Bhaskar's (1998) rather densely and obscurely explained critical realist position. The most im portant insight of critical realism is pro vided by asking — and answering — the question: 'how are experiments possible?' (Collier 1994, page 31). Bhaskar suggests the answ er is that experiments are possible because there are underlying structures and mechanisms in the w orld which have causal power. These structures are real and intransitive (that is their existence is in dependent of any investigation into their nature) so that experiments are repeatable, and become a feasible way of interrogating nature, to improve our understanding.
More crucially, experiments are necessary because the w orld is an open system in which m any structural components are always acting in concert so that no clear un derstanding of the structural causal mechanisms can be reached w ithout isolating in dividual mechanisms. An experiment helps us to understand individual causal struc tures and effects by isolating them from other effects w ith which they normally co exist. Bhaskar further argues that the mechanisms of the w orld are inherently layered, which gives rise to the distinctive hierarchy of disciplinary division in the academy from sub-atomic physics, through solid-state physics and chemistry, to biochemistry, psychology, sociology and so on. This perspective is particularly well described by Harvey & Reed (1996), who also point to the consistency of such a view w ith the notion of emergence in complex systems.^ An em ergent phenom enon is one whose existence is not readily predicted from an understanding of the mechanisms operat ing in the substrate in which it occurs. Further, such a phenom enon's behaviour may be governed by laws which, while they are consistent w ith the laws in the substrate, may be identified and have explanatory force of their own. Perhaps the best example of this is the way m which the chemical behaviour of organic molecules (DNA, RNA, amino acids, proteins) gives rise to the biological/biochemical behaviour of primitive life-forms (in chapter 3 we will encounter a more abstract example of emergence in the complex behaviour of certain cellular automata, see page 58).
From this perspective, space can be regarded as a structural property of causal mechanisms in any kind of system, physical, chemical, biological, social, economic or
whatever. Space is the m edium in which the causal mechanisms operate, and to that extent, m ay shape the particular conjunctions of forces and mechanisms which may combine in any particular situation. However, against this, many mechanisms may be relatively independent of spatial constraints, so that the structuring effect of space is likely to be weak. Writing from the same perspective, Sayer (1992) is critical of both absolute and relational approaches. He argues that absolute models of space are un satisfactory since they attribute effects (the "friction of distance") to something which is nothing b u t em pty space (vacuum). Relational models, on the other hand, lack coherence and are prone to "subjectivism" whereby relations depend on your point of view. His interesting observation is that, in general, social (and other non-spatial rela tions) are necessary, whereas spatial relations are contingent to explanation. In other words most social situations could have many spatial realisations. For example many different spatial manifestations of the organisation of a factory, or a city are possible. This is not to say that space has no effects, because the particular spatial form which some social system takes may have effects which reinforce or underm ine that social system. This may be a partial explanation of w hy more ambitious theoretical schemes (Harvey 1990, Soja 1989, for example) which seek to ""reassert space in critical social theory'" — to paraphrase the sub-title of Soja's influential book — have often failed to produce equally impressive practice. Sayer's conclusion is that in social science, relational models of space m ust be considered, b u t that there is little which can be said in general about the effects of space, which m ust be studied and understood in particular cases.
As will become clear, while I agree w ith this position in general, I think it may be possible to make some general statements about the kinds of processes (suitably defined) which can occur in particular kinds of spatial system (again, suitably de fined). C hapter 7 represents a small contribution to a research program focused in this direction.
2.2.2 Th e proximal model o f space
In the proximal conception of space (Couclelis 1997, Takeyama 1996, Takeyama & Couclelis 1997), the fundam ental element is the neighbourhood. A neighbourhood is defined by relations of nearness between spatial elements, and nearness in turn depends on both (spatial) adjacency and (functional) influence. Clearly a Voronoi con ception of space is an example of such an approach, w here adjacency is essential and neighbourhoods are contiguous. However, the proximal conception is more general, precisely because it allows non-contiguous neighbourhoods, based on relations of in fluence betw een elements. It also allows the incorporation of functional and spatial relations, and of fuzzy concepts and phenomena. This seems a rich vein w orth further exploration. That it has developed in the context of a discussion of cellular automata models for urban and regional planning is significant, and strongly influences the m ethods adopted here for developing the idea.
Allowing that a proximal conception of space represents a useful addition to ex isting approaches on w hat bases might spatial models be constructed? Various met rics seem reasonable: the Voronoi approach is one such; Okabe et al. (1994) present a large family of augm ented Voronoi-type approaches, and any of these could be used as the basis of a proximal model. Extensions of the basic Voronoi concept of proximity polygons are based on different metric systems. This is illustrated in figure 2, where a variety of spatial partitions based on different metrics are constructed based on the same set of point locations.
represent-i->
F igure 2 A simple Voronoi partition and three variants {source:
Okabe et al. 1994).
• Street vertices
o Plot vertices
ing street segments which they meet at a junction. In the second example streets and buildings are included, but only the relation b u ild in g on street' is represented. In the final example only buildings are represented, bu t each is taken to have a relation with all those other buildings with which it shares a street frontage. Thus, even this simple situation can give rise to a rich variety of proximal models. Note that there is already a whole series of decisions behind this representation as Kruger's {1979a, 1979b) work makes clear, since many other sets of spatial elements m ight be deem ed relevant. More detail might be incorporated by considering rooms in buildings or floors; for a m odel covering a larger geographical area, city blocks m ight become the most rele vant element. Having determ ined which elements are to be considered, the proximal model builder m ust determine which relations to include. All three examples shown use simple locality criteria to build the representation. Functional relations between elements might also be considered. The point is that m any representations are possi ble, and that it is not really possible, w ithout specifying our purpose, to privilege one representation over any other.
It is im portant at this stage to note that a proximal m odel of space entails a departure from the apparently self-evident assum ption that space is uniform, since neighbourhoods are not necessarily defined according to a simple distance criterion or indeed, according to any universally applicable metric. For example, the approach m ight lead us to regard London and Tokyo as more meaningfully related to one an other than London and Swansea. Stated in this way, it is perhaps obvious that it is the spatial unformity assum ption which is actually unreasonable, in many socio economic and hum an geography cases! There are clearly some processes, weather patterns and governance, for example, u nder which London and Swansea are closely related and London and Tokyo only distantly related, if at all (notwithstanding the flap of the famous butterfly's wings). But there are other contexts and processes, the movement of large scale capital flows, air-travel, un d er which the relative standings of the London-Swansea and London-Tokyo relations are very different. It is evi dent from the discussion earlier in this chapter th at the disciplinary context (spatial analytic, cognitive, planning, economic, or whatever), as well as the subject under investigation, will influence which types of relations at w hat level are regarded as relevant.
guishes a proximal model from a relational one. In a relational model, everything is related to everything else — which may in the end not tell us very much. In the proximal case, decisions about which relationships m atter restrict the representation to just those relationships, thus structuring the model, and (hopefully) giving it more explanatory worth. The explicit recognition of the modelling process itself means that particular subsets of the possible elements and possible relations betw een those ele ments are selected in any particular case. In geographical models, it is likely that the resulting model will exhibit a certain "spatial coherence", so that near elements are more likely to be related than distant ones, bu t this is strongly dependent on the scale (spatial and temporal) of the representation. It is also possible to imagine building a model in which there is a hierarchy of relations betw een and across different scales of investigation, an approach which seems particularly suited to Bhaskar's notion of the layering of reality, and to current geographical ideas about netw orks of world cities, trading blocs, nation states, economic regions and so on (Byrne 1998, pages 91-94).
In view of my emphasis on the model builder choosing a representation, and being conscious of the choices made, it m ight be (somewhat optimistically) thought that this approach stands up to the criticisms of postm odern relativist accounts of representation. But, of course, no representational approach can ever do that.^ Once a particular representation is chosen, it is "privileged" over the others which have not been chosen. To the extent that the representation is of a system of relationships and not of individual elements there may be some scope for a reconciliation with post m odern views (Cilliers 1998). Ultimately, however, in the best m odernist tradition, the choice of representation will rely for its validity on the extent to which the re sulting model can provide a plausible account (not necessarily a prediction) of what happens (past, present or future) in the w orld itself.
2.3
Conclusion
Figure 4 presents a possible way of thinking about the proximal models explored in more detail elsewhere in this thesis. There are m any conceptions on which spatial models may be based from the mathematical or physical conceptions of science to
Spatial c o n c e p t s as a basis for spatial models
Geom etric Topological Proximal Cognitive Mystical
(Euclidean) Mathem atical Morphological (Intuitive)
F igu re 4 A possible spectrum of spatial concepts.
mystical concepts such as magic. Proximal m odels of space m ay result from spatial
adjacencies which are entirely mathematical (the Voronoi proposal), but they may
also be constructed on other bases such as urban m orphology, where functional or
perceptual relations are involved. The presentation of these ideas as a spectrum is
appropriate, since there are no obvious dividing lines betw een the conceptions m en
tioned. N ote that the location of proximal m odels on this spectrum is local (as it
were) to this thesis, since there is no reason, in principle, w h y proximal m odels of
cognitive-m ystical space could not be constructed.
It should be clear from the foregoing that any typology of space and spatial con
cepts m ust necessarily be partial (in both senses of the word) and for som ething. It
is introduced here as a basis for m odel building that seeks to exam ine the com plexi
ties of spatial phenom ena in cities. G iven the philosophical heritage of debates about
space it w o u ld be arrogant to claim any more. This approach is inform ed by pragma
tism, and an interest in tackling problems, not by the abstract ideas of philosophers,
so that G ould (1997, page 128) captures the intent w h en he says:
Graphs and cellular automata
In pursuit of Gould's pragmatic program m e we now turn to an examination of the tw o abstract mathematical tools on which the present investigation is founded. This chapter describes tw o widely used abstract mathematical representations for investi gating systems of relations between elements — graphs and cellular automata. Both representations are applicable to a m uch w ider range of problem domains than those where spatial relations are significant, which allows us to benefit from a great deal of earlier w ork across m any disciplines. Attention is draw n to the particular aspects of problem domains which are emphasised by each approach. In the next chapter this emphasis is retained, w hen I examine some examples of the application of these rep resentations to the urban morphology domain. The location of each representation in the conceptual scheme of chapter 2 is also briefly discussed.
The presentation in this chapter is necessarily fairly formal in order to avoid ver bose descriptions. This definition of terms lays the necessary ground w ork for later material based on graph theoretic m easures and cellular autom ata properties.
3.1
Graphs
3.1.1 Some definitions
A graph G consists of a finite non-em pty set V( G) = {vj} of vertices and a finite non em pty set E{G) = {si) of distinct unordered pairs of distinct elements in V, called edges. The num ber of elements in V , n, is the degree of G. The num ber of edges in G is denoted by m. The edge Vj} m ay be denoted by ViVj or eij. Figure 5 shows a typical small graph w ith V( G) = {a, 6, c, d}, E{G) = {ac, be, bd, cd], n = 4, and m = 4.
Loops ViVi and m ultiple edges m ay be allowed if we drop the requirement that vertices in edges are distinct, or that edges be distinct. Directed graphs {digraphs) consist of a set of vertices V( D) , and a set of arcs A( D) each of which consists of an ordered pair of vertices in V.
If e = ViVj is an edge of G then e joins the vertices Vi and vj, and these vertices are adjacent. We say that e is incident w ith V i and V j and that V { is a neighbour of V j . The
neighbourhood N{vi ) of V{ is the set of vertices in G adjacent to Vi. Two edges incident w ith the same vertex are said to be adjacent edges. In figure 5, N{b) = {c, d], and edges be and bd are adjacent.
Figure 5 A typical graph.
discussion of spatial models presented in the preceding chapter, graph representa tions of spatial situations combine aspects of both absolute and relative spatial m od els. The vertices typically represent well defined objects located in absolute space, while edges m ay represent spatial relations of adjacency, nearness or whatever. Of course, the graph itself is aspatial and the relations m ay be completely non-spatial or some combination of non-spatial and spatial relations.
Vertex degree
The num ber of edges incident w ith a vertex is its degree denoted deg(fi), and often denoted ki. The maximum degree in G is sometimes denoted by A. A vertex of degree 0 is isolated, and a vertex of degree 1 is an end-vertex. The degree list of G is the set of degrees of the vertices of G often arranged in non-decreasing order. If all vertices in G have the same degree k, it is regular of degree k, or k-regular. The density of a graph is m / Q ) , that is the fraction of all the possible edges which could exist betw een vertices, which do exist. In figure 5, deg(6) = 2, and A = deg(c) = 3; a is an end-vertex, the
degree list of the graph is {1,2,2,3} and its density is | .
M atrix representations
The adjacency matrix of G is the matrix A(G) = where = 1 if V{ and vj are neighbours, and 0 if not. Thus the graph of figure 5 w ould be represented by the adjacency matrix
A(G) =
(a) (b) (c) i d) 0 0 0 0 1 1 0 1 1 0 1 1 0 1 1 0 (3.1)
Note that the row order is meaningless, bu t that the row and column ordering m ust be the same. The incidence matrix of G is the n x m matrix B(G) w here bij = 1 if is
incident w ith vi, and 0 if not. The incidence matrix of the graph in figure 5 is
B(G) =
(o)
(b)
( c )
i d)
(ac) (be) ( bd) ( cd)
1 0 0 0
0 1 1 0
1 1 0 1
0 0 1 1