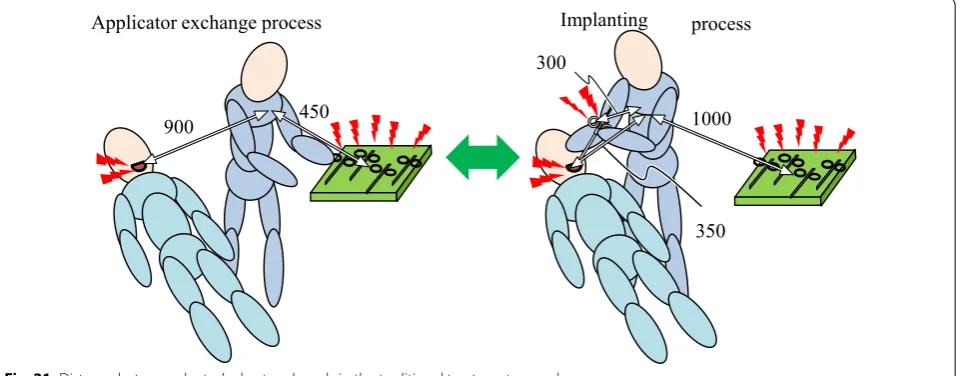
Remote radioactive seed-loading device for permanent brachytherapy of oral cancer with Au-198 grains
Full text
Figure







Related documents
3 Holding MRSK: stock price performance since 2010 This report analyses Russian electricity distribution companies (MRSKs) which have adopted the fundamentally new tariff
On the other hand, in all countries, but especially in Spain and France, the change in the identification approach (choice of k ) has far more impact upon the gap
Avancemos I : Unidad 3, Lección 1 Supplementary materials Language Lab Videos/DVDs Workbook Audio-files/CDs Teachers’ Resource Book Music/CD Teacher-made worksheets
• demonstrate understanding of the nature of language through comparisons of the target and primary languages.. • examine and explain similarities and differences between the
in part to pay for $780.00 for Quoizel light fixtures for the residence of defendants JOSEPH and MELINDA ASSELIN, 518 Old Farm Road, Amherst, MA. 185 05/25/98 Defendant RAYMOND
Following the Books Closure Date, the names of each such Entitled Shareholder as well as the relevant number of BP Distribution Shares to be distributed to such Entitled
Voice IPS is a security management system for voice networks which monitors voice traffic for multiple calling patterns or attack/abuse signatures to proactively detect and
