DETERMINING PRIORITY OF THE CRITERIA FOR STRUCTURAL
OPTIMIZATION OF TECHNICAL SYSTEMS
Prof. dr. еng. Malakov I., Asist. prof. eng. Zaharinov V. Dept. ADP, Faculty of Mechanical, TU - Sofia, Bulgaria
Abstract
:
In the present paper is proposed a classification of the problems and the mathematical models for choosing optimal structural variant while designing a technical system. Algorithms and software models were developed based on known methods for determining the priority of criteria functions. The algorithms and models are implemented in a dialog system for structural optimization. Results are shown from using the software for solving a particular problem.KEYWORDS: DESIGN, TECHNICAL SYSTEMS, MULTICRITERIA OPTIMIZATION, STRUCTURAL VARIANT, MATHEMATICAL
MODELS, PRIORITY, WEIGHT COEFFICIENTS, SOFTWARE
1.
Introduction
During the design process of technical systems (TS) it is necessary to solve multiple times the problem for choosing optimal (rational, effective) structural variant. The real life conditions necessitate this choice to be made according to a set of criteria, because the objects of study are evaluated through different parameters and in the common case they are contradicting with each other.
Therefore the problem for choosing an optimal variant is a multicriteria optimization problem of discrete programming. Its practical importance lead to the creation of a significant number of methods and algorithms [2-12]. The topicality of the problem for structural optimization of TS leads to a great number of new scientific studies, the results from which are constantly published in the specialized literature.
Solving the problem leads to a number of difficulties. One of the basic difficulties is defining priority for the criteria functions. Studying the specialized literature [2-7] shows, that for a number of known methods for determining the importance of criteria there is a lack of algorithmic and software development, which makes difficult their use in practice. It is known that as many more solutions of the problem are produced with taking into account different importance for the criteria, as much increases the possibility for finding a solution which fulfills in the best way the requirements of the contractor.
The purpose of the this paper is systematization of problems for choosing optimal structural variant and development of algorithms and software for determination of the priority of criteria functions, which to be integrated in a dialog system for structural optimization of TS.
2.
Formulation and classification of the
problems for choosing optimal structural
variant
The choice of optimal structural variant of technical systems (TS) is related to solving the problem [3]:
For developed functional structure of a TS and defined alternative elementary devices executing its partial functions, must be defined such a compatible combination of elementary devices, that executes the general function of the system, which combination must satisfy predefined requirements and conditions (constraints) regarding the technical and economic characteristics of the system.
2.1.Building the set of possible structural variants
Solving the defined problem is done after developing the functional structure of the TS and filling out a morphological table, in which table for every partial function of the system are defined suitable for its execution elementary devices (building components) and the connections (relations) between them. Basic criterion for
including a given elementary device in the morphological table is the quality of execution of the corresponding partial function. A significant special feature while composing the morphological table is taking into account the compatibility between the elementary devices, i.e. their capability for joint operation in a general structure.
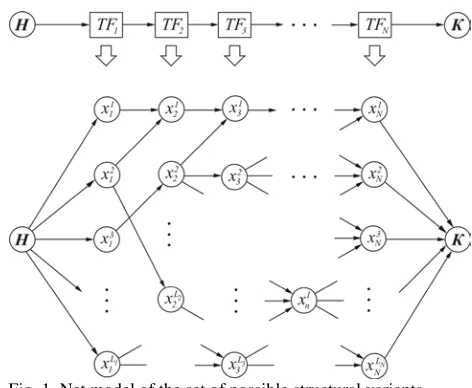
The set of structural variants for building a TS can be represented by a net model (oriented graph) [1]. Every node in the model represents a particular elementary device, and every arc - a connection between two devices. On Fig. 1 are shown an example of a functional structure of a TS and the set of its possible structural variants in the form of a net model, where N is the number of partial functions of the system; TFN – N−th partial function of the
TS; xnl – l−th elementary device, executing the n−th partial function; LN - the number of alternative elementary devices,
executing the N−th partial function.
The possibilities for combining the elementary devices in structures, executing the general function of the TS, are shown by arrows. Every path connecting the beginning (H) and end (K) of the net model represents a possible structural variant.
Fig. 1. Net model of the set of possible structural variants
2.2. Characteristic special features of the problem for choosing optimal structural variant
The analysis of the formulated problem reveals some of its characteristic special features and problems, which must be taken into account when formalizing it, choosing suitable methods for optimization and development of algorithms and software.[4].
(target functions or efficiency criteria) of the TS, which depending on the particular requirements and goals of the solved problem, must have optimal (minimum or maximum) values.
2. From the physics sense of the problem it is clear, that the separate criteria can have different "importance" (weight, significance) while choosing the optimal variant of a TS, i.e. one or more criteria to have priority over the rest. The priority of the target functions render a significant influence over the choice of solution, but scientifically grounded and widely accepted methods for its determination do not exist. Solving this problem is carried out from the designers of the system together with the contractor.
3. While solving the problem it is necessary to consider the presence of constraints over the compatibility between the elementary devices. Here by the term "compatibility" is understood the possibility for combining and simultaneous "work" of the elementary devices in general structure while executing the general function of the system [3]. The compatibility depends on a number of properties of the building components - geometrical, information, functional and etc. The simplest, yet the rarest case is that in which there is full compatibility between all elementary devices. In general there is limited compatibility between the devices. Besides it is possible two devices, executing neighbouring partial functions of the system to be incompatible, as well as to be incompatible with devices, which executing not neighbouring partial functions. Also a significant special feature is the possibility some elementary device to be able to execute more than one partial function.
4. The formulated problem is characterized with high level of uncertainty, which is determined by the insufficient and incomplete information in the first stages of design, when the set of structural variants is developed and the best amongst them is chosen.
5. Solving multicriteria optimization problems is related to a number of specific problems, described in the specialized literature [2-10], which problems makes it difficult to find solution. One of the basic problems is determining priority of the criteria.
6. The great number of partial functions of today TS and the great variety of alternative elementary devices for their execution, predetermine the availability of a great number of structural variants, which have to be evaluated. For example, the number of possible structural variants of a complex TS can reach 1020 [3], and in some cases exceed this number. Therefore, choosing an optimal variant is related to significant computing procedures.
7. The formulated problem belongs to the class of problems of the discrete programming. Finding of a solution is accompanied by significant difficulties. Solving the discrete problem by substituting it with a continuous analogue and following rounding of the produced solution to a close integer solution is not possible.
8. When formalizing the problem it must be taken into account the possibility for presence of constraints over the values of some technical and economic characteristics of the designed TS. Therefore, in the general case the problem is with "resource" constraints.
2.3. Classification of the problems for optimization of the structure
In general choosing of optimal structural variant of a TS is related to solving vector (multicriteria, multigoal) optimization problems [3, 4]. They can be classified by different indications:
⇒ type of the elementary devices and constraints over the compatibility between them;
⇒ priority for some target functions;
⇒ absence or presence of uncertainty regarding the characteristics of the elementary devices and the system;
⇒ type of the vector criterion for optimization;
⇒ type of the constraints over the technical and economic characteristics and etc.
Of significant importance for the algorithmic and software development of the problem in terms of certainty are the first two indications.
► By the first indication the problems are divided into two large groups.
A) Problems, for which every elementary device executes only one partial function of the system and there is absence of constraints over the compatibility between the elementary devices. In this case:
∏
=
= × × ×
= N
1 n
n N 2
1 X X X
X
X , (1)
where X is the set of possible structural variants of the TS;
n
X - set of elementary devices, which execute the n−th partial function of the system.
In the case in hand the number L of the possible structural variants for building the TS is defined by the dependence:
∏
=
= N
1 n
n
l
L , (2)
where ln is the number of elementary devices, which
execute the n−th partial function of the system.
В) Problems, for which in the set of elementary devices, executing the partial functions of the system, exist polyfunctional elements and/or constraints over the compatibility between the sets elements, i.e.:
∏
=
≠ N
1 n
n
X
X (3)
In this case:
∏
=
< N
1 n
n
l
L (4)
Here with the term polyfunctional device is meant such a device, which is executing more than one partial function of the system.
► By the second indication, the problems for choosing of an optimal structural variant are two groups:
C) According to the first group of problems all criteria are with the same relative importance when choosing a solution, i.e. the criteria are equivalent.
D) The second group of problems is characterized by different relative "importance" (weight, significance) of the target functions, i.e. one or several criteria have priority above the others when choosing a variant for the TS. The priority of the target functions has a significant influence over the chosen solution.
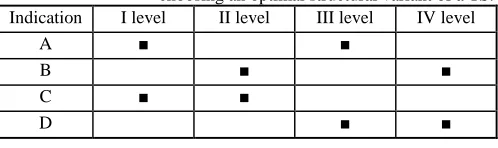
Depending on the observed two classification indications, the problems for choosing an optimal structural variant of a TS can be grouped in four hierarchical levels (Table 1).
Table 1. Classification of the problems for choosing an optimal structural variant of a TS. Indication I level II level III level IV level
A ■ ■
B ■ ■
C ■ ■
D ■ ■
First level
The problems from first hierarchical level are multicriteria optimization problems of the discrete programming with equal in value (equivalent) target functions and without constraints over the compatibility of the building elements of the TS.
The mathematical model of these problems has the following formulation:
To be found a variant
{
Nl}
l n l lx x x x
x 2* * *
* 1 *
;...; ;...; ;
= ,
, 1 ,n N L
l∈ n = ÷ optimal according to a set of criteria:
{
f x k K}
x
optF( )= k( ); ∈ , (5)
satisfying the constraints:
( )
x b ,m M1gm ≤ m ∈ , (6)
2 , )
(x b m M
gm ≥ m ∈ , (7)
{
x l L n N}
x= nl;∈ n, =1÷ , x∈X , M1 =m1, M2 =m2,
2 1 m
m
M= + , Ln =ln (8)
where F(x) is the vector of target functions (vector criterion for optimization); fk(x) -
th
k− technical and economic characteristic of the TS, for which it is sought optimal (maximum or minimum) value, k∈K ; gm(x) - m−th technical and economic characteristic of the TS, over which value there is a constraint,
M m=1÷ ; xnl -
th
l− elementary device executing the n−th partial function; f (x), gm(x) - functions of a discrete argument, x∈X , which are defined through tables.
Second level
The mathematical model of the problems from this level is analogous to the model from the first level. The difference is in the presence of polyfunctional elements and/or constraints over the compatibility between its elements, i.e. the set of possible structural variants of the TS corresponds to conditions (3) and (4).
Third level
The problems from third hierarchical level are multicriteria optimization problems of the discrete programming without constraints over the compatibility between the building elements of the TS and presence of priority for some target functions. The general mathematical model for this group of problems has the following form:
To be found a variant
{
Nl}
l n l lx x x x
x *2 * *
* 1 *
;...; ;...; ;
= ,
, 1 ,n N L
l∈ n = ÷ optimal according to a set of criteria:
{
f x k K}
x
optF( )= k( ); ∈ , (9)
which significance is predefined, and satisfying the constraints:
( )
x b ,m M1gm ≤ m ∈ , (10)
2 , )
(x b m M
gm ≥ m ∈ , (11)
and conditions (1) and (2).
The significance of the separate criteria can be defined as: - priority order (cortege) K~, which is an ordered set of indices of the criteria K~={1,2,...,k} . The indices are ordered in descending order of importance of the criteria, i.e. criteria, which indices are on the left, dominate over the criteria, which indices are on the right. The dominance is qualitative, the quantitative side of the priority is not accounted for.
- priority vector Λ={λ1,λ2,...,λk}, which components are relations, defining the degree of relative importance of two neighbouring criteria from the priority order.
- weight vector (weight coefficients vector). For it for every criterion fk, k∈K, a weight coefficient is assumed (coefficient of
significance) αk, k∈K, where K is the set of indices of the
criteria in the vector criterion for optimization. The coefficient αk
is a real positive number. This number αk defines the relative
"weight", “importance”, “value” of k−th criterion relative to the rest. The weight vector
} {αk
=
α , k∈K , (12)
represents a k dimensional vector, defined in the single hypercube:
} ],
, [ :
{ 0 1 1
K k
k k
k α ∈ α =
α =
α
∑
∈
(13)
Fourth level
The mathematical model of the problems from this level is analogous to this of third level. The difference is in the presence of polyfunctional elements and/or constraints over the compatibility between its elements, i.e. the set of possible structural variants of the TS corresponds to conditions (3) and (4).
3.
Algorithms of methods for defining of criteria
priority
Defining priority for the criteria is one of the basic problems when solving multicriteria optimization problems. For supporting the choice of a suitable method for evaluation of the significance of the criteria a classification of known methods has been developed, which classification includes over 70 methods, classified into 19 groups [3]. The classification represents an open structure, to which it is possible addition of new methods. In the present paper are developed algorithms of methods, which will be added to the known classification. With them a weight coefficients vector is defined after processing the a priori information about the importance of the criteria, given by experts. On the basis of the added methods a software for priority defining has been developed, which software is integrated in the dialog system for multicriteria optimization PolyOptimizer [4].
3.1 Saaty's method [8].
With Saaty's method a solution of the following matrix equation is sought:
α α nmax
A =
, където
nmax≥k,
(14)where A is the matrix of binary comparisons, α is the principal right eigenvector of A , nmax is the maximum right eigenvalue of A, and k is the number of compared criteria.
The following algorithm is used:
1. The components of the principal right eigenvector α (column matrix) is defined from:
k k
j kj k
k
j j
a a
∏
∏
= =
=
1 1
1
...
α
(15)
2. The vector α is normalized towards the sum of its components, so that:
∑
∑
= =
=
k
i i k k
i i
1 1 1
...
α α
α α
α
.
(16)The components of the normalized vector α are the calculated weight coefficients.
3. For determination of nmax first the components of vector
Σ
A (row matrix) are found from:
∑
∑
= =
Σ =
k
i ik k
i
i a
a A
1 1
1...
,
(17)4. The vector AΣ is multiplied by the vector α. The result is equal to nmax.
5. The index of compatibility CI and the compatibility ratio
CR are calculated from:
1 max
− − =
k k n
CI , (18)
RCI CI
CR=
,
(19)where RCI is the random compatibility index, given in table form (Table 2).
1 . 0
≤
CR
.
(20)If CR is greater than 10. it is recommended that a reconsideration of the evaluations of the comparisons is to be done, until condition (20) is satisfied.
Table 2. Values of the random compatibility index RCI
k 1 2 3 4 5 6 7 8 9
RCI 0 0 0.52 0.89 1.11 1.25 1.35 1.4 1.45
3.2 Pardalos' and Man's method [10].
The following algorithm is used:
1. The matrix of binary comparisons A is composed, having the following form:
1 1 1 3 2 1 2 23 21 1 13 12 k k k n n a a a a a a a a a
A=
,
(21)where j i ij w w
a = ,
ji ij
a
a = 1 ,
∈ 9 1 , 8 1 , 7 1 , , 2 1 , 1 , 2 , , 7 , 8 ,
9
ij
a , i,j=1÷k, k is the number of
compared objects.
2. The following matrix equation is composed:
b
BW= , (22)
where: 1 1 1 1 1 1 0 0 0 0 0 1 0 0 0 1 0 0 0 0 1 0 0 0 1 , 1 23 22 13 12 k k a a a a a B − − − − − − = , k w w w W 2 1 = , 1 0 0 0 = b (23)
3. The following linear least squares problem is composed according to (23):
( )
x b BWf2 = − . (24)
4. The following system of linear equations is composed:
( )
( )
( )
0 0 , 0 2 2 2 1 2 = ∂ ∂ = ∂ ∂ = ∂ ∂ n w x f w x f w x f . (25)
5. After solving the linear equations system (25) the components of vector W are found, which components are the sought weight coefficients:
n w w w W 2 1
= . (26)
6. The residual vector r is calculated:
BW b
r= −
.
(27)7. The average residual AR is calculated:
(
1)
2 2 1 2 + − =∑
= n n AR k i i ρ,
(28)where ρi is
th
i− component of the residual vector r.
3.3 Voichinskii's and Ianson's method [11].
For this method the definition of priority for the criteria is done by one expert, who consecutively makes a qualitative evaluation about the relative importance of all pairs of criteria by using the symbols: "" - more important, "≈" - with equal importance, "" - less important. The results are written down in a preference matrix
[ ]
k k ij
a
A= × . After that the expert must define how many times the importance of the compared criteria differs. Different cases are possible:
- when the criteria are differing significantly:
÷ ≈ ÷ = j i j i j i ij f f if f f if f f if a , 1 . 0 05 . 0 ; , 1 ; , 9 . 1 95 . 1 (29)
- when an average, moderate difference between the criteria exists: ≈ = j i j i j i ij f f if f f if f f if a 5 . 0 ; , 1 ; , 5 . 1 (30)
- when a slight difference between the criteria exists:
÷ ≈ ÷ = j i j i j i ij f f if f f if f f if a , 9 . 0 8 . 0 ; , 1 ; , 1 . 1 2 . 1 (31)
Determination of the weight coefficients αi is done without the participation of the expert in the following order:
1. The symbols , ≈, are replaced in the preference matrix with their corresponding values.
2. The sum
∑
= k j ij a 1is calculated for every row i=1÷k of the
preference matrix
[ ]
k k ija
A= × . The results are written as a column
vector 1 1 × = Σ =
∑
k k j ij a A .3. The values of the coefficients of significance are calculated for all criteria, which values are elements of a column vector
[ ]
×1=αi k
α , produced by multiplying the preference matrix
[ ]
aij k kA= × by the column vector
1 1 × = Σ =
∑
k k j ij aA , i.e. the value
of αi is calculated from:
∑
∑
∑
= = = + + + = k j k j kj ik k j j i j ii a a a a a a
1 1 1
2 2 1
1
α (32)
4. The values of the normalized weight coefficients of the criteria are calculated from:
3.4 Single comparisons method [7].
1. The criteria are ordered in decreasing importance (cortege). The most important criterion for the evaluation, staying in the first
place of the order, is evaluated as 1.00 1 1
=
i i
f f
and a rank of R=1.
2. Every criterion is compared to the preceding by importance and a value for the binary comparison between the two criteria is defined.
[
0.1,0.2, ,1.0]
1∈
− R j
R i
f f
, i,j,R∈
[ ]
1;k (34)4. The significance coefficient for every criterion is calculated:
[ ]
∏
∈ −
= 2
; 2k 1 R jR
R i
f f
IF (35)
5. The significance coefficients are normalized, and the weight coefficients are obtained:
∑
=
= k
j j i i
IF IF w
1
(36)
4.
Software
Based on the developed algorithms and software modules for defining of priority of the criteria in multicriteria optimization of complex technical systems, a graphical user interface has been developed, which interface is integrated in the software system PolyOptimizer.
The user interface provides the decision maker, with an easier and clear way to define and input his/her subjective preference towards a given target function (criterion). The aim during development of the graphical user interface for the priority defining modules, has been for maximum abstraction of the user from purely quantifying the priority, i.e. concrete value, instead to the user is presented a visual way, through which he/she can express his/her preference. This is achieved through interactive scales and symbols. Eliminating the deterministic nature of the priority definition, aids the decision maker when making a choice, because in most cases the user has difficulties when asked to give a concrete value for the priority of one criterion over other (or over the rest).
In the software system PolyOptimizer are integrated four modules for defining priority of the target functions during multicriteria optimization: module Eigenvalue.py (Saaty's method), module HumanApproach.py (Pardalos' and Man's method), module MVJ.py (Voichinskii's and Ianson's method) and module SingleComparisons.py (Single comparisons method).
The user interface giving access to the methods for priority definition is integrated in the window for solving of multicriteria optimization problems shown on Fig. 1.
Fig. 1: User interface for finding an optimum
Access to the methods for defining criteria priority is granted by pointing with the cursor and pressing the left mouse button on
. On Fig. 2 is shown the user interface after the check button is selected.
Fig. 2: User interface after selecting the check button
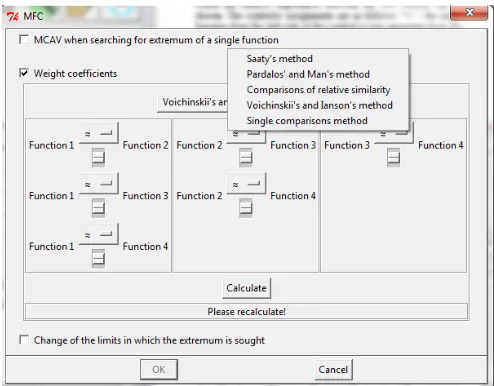
By default the Voichinskii's and Ianson's method is selected. For choosing of other method the following actions must be performed: pointing with the cursor over
, and pushing the left mouse button, after which a menu is displayed with a list of all available methods. The cursor is pointed over the desired method and the left mouse button is pressed. On Fig. 3 is shown the interface with the menu including the list with all available methods.
Fig. 3: Menu with list of available methods for defining criteria priority
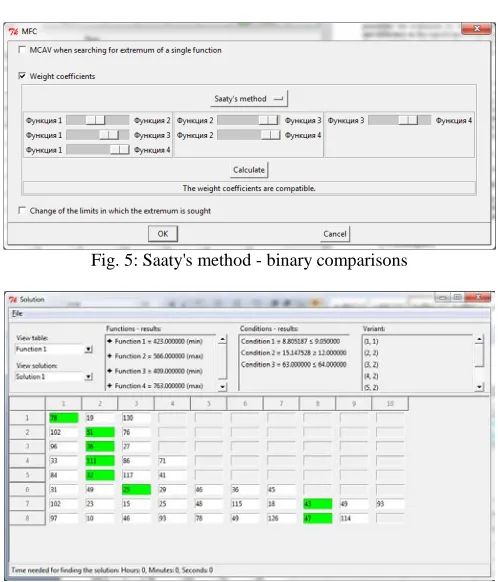
After input of the binary comparisons solving the problem for
defining criteria priority is done by pushing the button . Saaty's method checks for compatibility of the matrix of binary comparisons. The purpose is to remove any contradiction in the input information. When compatibility is lacking, i.e. there is contradiction, Saaty's method proposes change of certain priorities, so that the problem becomes compatible.
When there is a contradiction in the input information in the
frame of the button a message is shown reading
. In that case the decision maker must reconsider the evaluated by himself binary comparisons and change them. After the change, the newly entered information
must be recalculated by using the button . This procedure is repeated until in the frame can be read the message
.
The Pardalos' and Man's method can be used for the same number of functions, as Saaty's method. The user interface is identical with that used with Saaty's method and the working principle is the same.
Voichinskii's and Ianson's method offers to the user a possibility for evaluation by two indications: relative importance and difference in the significance of the criteria. On Fig. 3 is shown the user interface when using this method.
For input of the relative importance the user uses the button
. When this button is pressed a menu appears , from which the relative importance between the two criteria can be chosen. The symbolic assignments are as follows: "<" - the target function from the left side of the symbol is less important from the function that is on the right side of the symbol; "≈" - the two target functions are equally important; ">" - the target function from the left side of the symbol is more important from the function that is on the right side of the symbol.
The difference in the significance of the compared target
functions is assigned through the vertical scales . Position of
the indicator means "significantly differing criteria"; position of
the indicator means "moderately differing criteria"; position of the indicator means "slightly differing criteria".
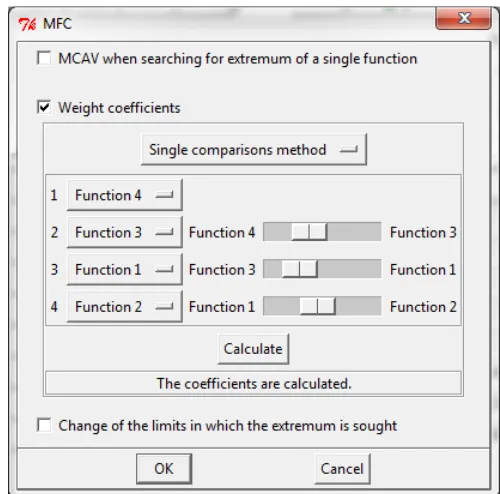
The user interface when using the single comparisons method is shown on Fig. 11.
5.
Example
5.1 Test problem
The following test problem has been solved using the four methods with equivalent input information:
( )
x f1min , min f2
( )
x , min f3( )
x , min f4( )
x , satisfying the constraints:( )
9.05 1 x ≤g , g2
( )
x ≥12, g3( )
x ≤64where x∈X; n=1÷8; L1 =3, L2 =3, L3 =3, L4 =4, 4
L5 = , L6 =7, L7 =10, L8 =9.
The components of the priority vector obtained by every method, are the values calculated by these methods. The information entered through the interface is equivalent and corresponds to the following ordering of the target functions:
2 1 3 4 f f f
f .
5.2 Solution for priority vector
{
1.00;1.00;1.00;1.00}
=
I
P (solution with equal value
for every target function)
The compromise solution is:
{
8}
8 7 7 3 6 4 5 2 4 3 3 1 2 2 1 *
; ; ; ; ; ;
,x x x x x x x x
x = , w* =0.2549
( )
* 390 1x =f , w1=0.2775
( )
687* 2 x =
f , w2 =0.3313
( )
* 437 3 x =f , w3=0.2549
( )
626* 4 x =
f , w4=0.3444
( )
* 8.849 1x ≈g , g2
( )
x* ≈12.174,( )
58* 3 x =
g
Fig. 4: Compromise solution
5.3 Solution with priority vector
{
0.07;0.04;0.26;0.63}
=
II
P (Saaty's method)
The found optimal solution is:
{
8}
8 8 7 3 6 2 5 2 4 2 3 2 2 2 1 *
; ; ; ; ; ;
,x x x x x x x x
x = , w* =0.0907
( )
* 423 1 x =f , w1=0.2775 f2
( )
x* =566, w2 =0.5128( )
* 409 3 x =f , w3=0.2092 f4
( )
x* =763, w4 =0.0907( )
* 8.805 1x ≈g , g2
( )
x* ≈15.148, g3( )
x* =63Fig. 5: Saaty's method - binary comparisons
5.4 Solution with priority vector
{
0.06;0.03;0.19;0.72}
=
III
P (Pardalos' and Man's
method)
The found optimal solution is:
{
4}
8 8 7 3 6 2 5 2 4 2 3 2 2 2 1 *
; ; ; ; ; ;
,x x x x x x x x
x = , w* =0.0556
( )
* 410 1 x =f , w1=0.3103 f2
( )
x* =468, w2 =0.6597( )
* 432 3 x =f , w3 =0.2467 f4
( )
x* =782, w4 =0.0556( )
* 8.899 1x ≈g , g2
( )
x* ≈13.7, g3( )
x* =58Fig. 7: Pardalos' and Man's method - binary comparisons
Fig. 8: Pardalos' and Man's method - optimal solution
5.5 Solution with priority vector
{
0.15;0.10;0.31;0.44}
=
IV
P (Voichinskii's and
Ianson's method)
The found optimal solution is:
{
8}
8 8 7 3 6 4 5 2 4 2 3 2 2 2 1 *
; ; ; ; ; ;
,x x x x x x x x
x = , w*=0.1407
( )
* 373 1 x =f , w1=0.2496
( )
510* 2 x =
f , w2 =0.5967
( )
* 405 3 x =f , w3=0.2026
( )
736* 4 x =
f , w4 =0.1407
( )
* 8.827 1x ≈g , g2
( )
x* ≈14.539,( )
58* 3 x =
g
Fig. 9: Voichinskii's and Ianson's method - binary comparisons
Fig. 10: Voichinskii's and Ianson's method - optimal solution
5.6 Solution with priority vector
{
0.04;0.02;0.22;0.72}
=
V
P (Single comparisons
method)
The found optimal solution coincides with the solution found in paragraph 5.3:
6.
Conclusion
The problem for choosing of optimal structural variant of technical systems is analyzed and its characteristic special features are defined. A classification of the multicriteria problems for structural optimization of TS by chosen indicators is proposed and their corresponding mathematical models are built.
Methods for defining priority of the criteria for multicriteria optimization are examined, with which methods a known classification will be further expanded. On the basis of the examined methods corresponding algorithms are developed. They are implemented in the form of software modules, integrated in the dialog system for multicriteria optimization PolyOptimizer.
For testing the developed software a multitude of problems have been solved, one of which is shown in the present paper. It has been solved with the same input information. The examined methods for defining priority of the criteria offer different solutions (priority vectors with different values of the corresponding components - weight coefficients), which is due to the different principles used when defining the components of the priority vector. Independently from the different values of the corresponding components the cortege (importance order) of the target functions remains unchanged, which follows from the identical input information. This is a predisposition of the possibility, which give the developed software modules, namely, deep study of the possible variant solutions of the problem, while changing the priority vectors components, without changing the priority order of the target functions.
References
[1] Boyadjiev, I.; Boyadjiev, B. & Malakov, I. (1996) Rechnerunterstuetzte systemvorgehenweise zur variantenauswahl beim konstruieren. Proceedings of the 7th
International DAAAM Symposium, ISBN 3-901509-02-X,
Katalinic, B. (Ed.), TU Vienna, Austria, 17÷19.10. 1996, pp 059-060, Published by DAAAM International, Vienna. [2] Efrani, T., Utyuzhnikov, S.V., Directed search domain: a
method for even generation of the Pareto frontier in multiobjective optimization. Engineering Optimization, Vol. 43, No. 5, 2011, 467-484..
[3] Malakov, I. Methodology for choice of optimal assembly structural variant. (in Bulgarian) Research work qualifying to receive the title of Professor, Sofia, 2009.
[4] Malakov, I. & Zaharinov, V. Interactive Software System for Multicriteria Choosing of the Structural Variant of Complex Technical Systems, Annals of DAAAM for 2012 & Proceedings of the 23rd International DAAAM Symposium, ISBN 978-3-901509-91-9, ISSN 2304-1382, pp 0199 - 0204, Editor B[ranko] Katalinic, Published by DAAAM International, Vienna, Austria 2012.
[5] Mihalevich, V. & Volkovoch V. (1982) Computational methods for study and design of complex systems. (in Russian) Nauka, ISBN , Moscow.
[6] Nogin V.D. Decision making in a multicriteria environment: quantitative approach. (in Russian) FIZMATLIT, Moscow, 2002. [7] Rinza, P., H. Schmitz. Nutzwert-Kosten Analyse. VDI Verlag
GmbH, Duesseldorf, 1977.
[8] 10Saaty, T.L. Eigenvector, and logarithmic least squares. Eur. J. Oper. Res. 1990. V. 48, №1, pp. 156÷160.
[9] Stoyanov, S.K. Optimization of technological processes. (in Bulgarian) Sofia, Tehnika, 1993.
[10] Triantaphyllou, E. Multi-criteria decision making methods. A comparative study. Kluwer Academic Publishers, Dodrecht, 2000.
[11] Voichinskii, A.M., E. J. Ianson. Technology of products for measuring equipment. (in Russian) Leningrad, Mashinostroenie, 1988.