2018 3rd International Conference on Information Technology and Industrial Automation (ICITIA 2018)
ISBN: 978-1-60595-607-7
A Completed Method for Incompleted Motion
Trajectory of Communication Station
Jianing Shen and Lunwen Wang
ABSTRACT
Discontinuous work of communication station will lead to incomplete motion trajectory data. In order to solve this problem, we put forward a completed method for incomplete motion trajectory of communication station. This method was based on the signal features of the different communication stations and the spatiotemporal properties of the different trajectories, and then the completed data were acquired by using cubic spline interpolation algorithm. The simulation experimental results demonstrate that the criterion of finding incomplete trajectory and the algorithm of completion are effective, and the completed trajectory of communication station can
meet the demand of the cognitive behavioral.1
INTRODUCTION
The non-partner communication station on the mobile platform transmits a large amount of command and control information, and its trajectory reflects the movement behavior of the communication station, and also reflects the information on the offensive and defensive status of the combat platform.
In recent years, there are many researches on the motion trajectory of aircraft
and other carriers[1-3], but there are two difficulties: 1. If the communication station
temporarily stops working, it cannot continue to acquire the position and trajectory information, resulting in incomplete motion trajectory data; 2.The acquisition of the trajectory position information mainly adopts the direction finding positioning technology, resulting in low trajectory accuracy [4], which has higher requirements
for the interpolation recovery algorithm. In order to solve the above problems, this paper proposes a method for completing the trajectory of communication stations.
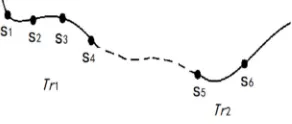
Figure 1. Incomplete motion trajectory.
INCOMPLETE TRAJECTORY JUDGMENT CRITERION
For the mission, the station in the silent state will cause the incompleteness of the acquisition trajectory. As shown in Figure. 1, track 1 and track 2 are not continuous. If the technical characteristics of their corresponding signals are the same, it is likely to be the motion track of the same station. This paper analyzes trajectory data from time, space and signal technology features to achieve detection of incomplete trajectories. Here, the criteria for judgment are defined in terms of signal technology characteristics, motion speed, and spatial distance.
Criterion 1: If the technical characteristics of the radio signals corresponding to track 1 and track 2 are the same, the stations corresponding to the two discontinuous tracks are the same, and the missing time in the middle is in the original motion mode, this makes it possible to determine that the two are incomplete tracks.
Criterion 2: If the average velocityvlosebetweens4ands5is close to the velocity of
the track 1 and the track 2, it is determined that the track 1 and the track 2 are an incomplete motion track.
Criterion 3: If the distancedlosebetweens4ands5is large, or the time interval
betweens4ands5is too long, then track 1 and track 2 are considered to be two
independent tracks.
MOTION TRAJECTORY COMPLETION METHOD
can improve the completion effect as much as possible in the case of inaccurate trajectory data.
Algorithm 1: Detection algorithm for incomplete trajectories.
Input: track 1 and track 2’s signal frequency f1, f2,amplitudeA1, A2, signal
[image:3.612.109.487.191.342.2]orientationω1,ω2; the data of track 1 and track 2.
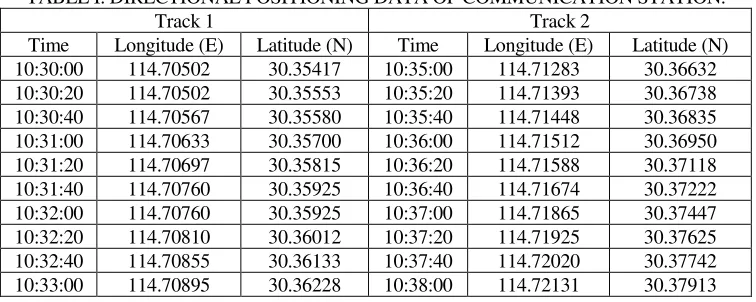
TABLE I. DIRECTIONAL POSITIONING DATA OF COMMUNICATION STATION.
Track 1 Track 2
Time Longitude (E) Latitude (N) Time Longitude (E) Latitude (N) 10:30:00 114.70502 30.35417 10:35:00 114.71283 30.36632 10:30:20 114.70502 30.35553 10:35:20 114.71393 30.36738 10:30:40 114.70567 30.35580 10:35:40 114.71448 30.36835 10:31:00 114.70633 30.35700 10:36:00 114.71512 30.36950 10:31:20 114.70697 30.35815 10:36:20 114.71588 30.37118 10:31:40 114.70760 30.35925 10:36:40 114.71674 30.37222 10:32:00 114.70760 30.35925 10:37:00 114.71865 30.37447 10:32:20 114.70810 30.36012 10:37:20 114.71925 30.37625 10:32:40 114.70855 30.36133 10:37:40 114.72020 30.37742 10:33:00 114.70895 30.36228 10:38:00 114.72131 30.37913
①iff1= f2,
1 2
0.8≤ω ω ≤1.2,
1/ 2
0.8≤A A ≤1.2, proceed to the next step;
②ifdlose/d1≤10and tlose/∆ ≤t 10, proceed to the next step;
③if0.5≤vlose/v1≤2 and
2
/
0.5≤vlose v ≤2, proceed to the next step;
④track 1 and track 2 is an incomplete trajectory corresponding to a station
The trajectory completion algorithm is cubic spline interpolation algorithm. Compared with other complete algorithms, the cubic spline interpolation algorithm has faster operation speed and better robustness. It is closer to the real situation than other interpolation algorithms, and has certain anti-noise ability.
SIMULATION AND EXPERIMENTAL RESULT’ ANALYSIS
Experimental data: In this experiment, noise is added to the AIS data [6] to simulate the error of the direction finding positioning, as shown in Table 1.
Experiment 1: Algorithm 1 detects the incomplete trajectory. Selects 25 points in the above-mentioned simulated station trajectory data and subtracts 5 points in the middle to obtain two discontinuous trajectories, the two tracks obtained are used for the detection of incomplete tracks. According to the calculated result, it can be judged that the two tracks are one motion incomplete trajectory of the same communication station.
interpolation algorithm. The criterion for the experimental result is the sum of the absolute values of the differences between the data recovered by the complete algorithm and the original data.
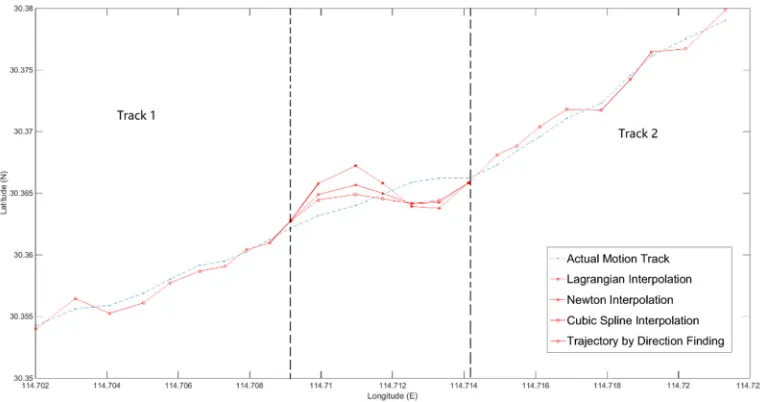
[image:4.612.106.486.209.410.2]The results using the above three algorithms are shown in Figure 2.From the experimental results, the cubic spline interpolation algorithm has the least degree of deviation, and the Newton interpolation algorithm and the Lagrangian interpolation algorithm have a certain degree of deviation.
Figure 2. Results of Three Interpolation Algorithms for Trajectory Completion.
CONLUSIONS
This paper proposes a data detection criterion and a complete method for incomplete motion trajectory of communication stations. The method combines the characteristics of the radio signal and the temporal and spatial characteristics of the motion trajectory to realize the detection of the incomplete motion trajectory, and then uses the cubic spline interpolation algorithm to recover the incomplete trajectory. The simulation results show that the method can effectively detect the incomplete trajectory, and the cubic spline interpolation algorithm is better than other algorithms in restoring the motion trajectory of the communication station.
REFERENCES
2. B. Zhu, Q. Huang, Guibas L. Urban Population Migration Pattern Mining Based on Taxi Trajectories [C]//Proceedings of the 3rd International Workshop on Mobile Sensing. Springer, 2015, 9142: 172-181.
3. Kai K., Jiabao W., Fangxin L. Anomaly Detection of Public Safety Based on Trajectory Clustering [J]. Computer Engineering and Applications, 2016, 52(14): 7-11.
4. Zhongya L., Nan X. The Multi-Sensor Joint Bearings-only Location Algorithm [J]. Journal of Signal Processing, 2015(4): 490-496.
5. Gang W. Research on Intelligent Algorithm in Ship Navigation Trajectory Recognition [J].Ship Science and Technology, 2016(8): 142-144.