2017 2nd International Conference on Software, Multimedia and Communication Engineering (SMCE 2017) ISBN: 978-1-60595-458-5
A New PHD Algorithm in Unknown Clutter
Environment Based on Box Particle
Shuai WEI*, Xin-xi FENG and Quan WANG
Information and Navigation College of Air Force Engineering University, Xi’an, Shaanxi 710077, China
*Corresponding author
Keywords: Multi-target tracking, Probability hypothesis density, Interval analysis, Box particle, Unknown clutter.
Abstract. In unknown clutter environment, traditional Probability Hypothesis Density (PHD) filter in multi-target tracking cannot guarantee a good performance and multitude number of particles leads to time consuming and low efficiency. Aiming at the problems, a new PHD filter tracking algorithm in unknown clutter environment based on interval analysis was proposed. Firstly, radar targets and clutter disjoint union state space modeled were established in random finite set. Next, using measurement model set up clutter model and derived to multi-target updated state function based on box particles. Additionally, the state of multi-target was recursively estimated in utilization of PHD filter box particles. Simulation reveals that the proposed algorithm is able to dramatically lower computational time with better tracking performance compared with traditional box particle filter.
Introduction
The traditional multi-target tracking algorithms need data association[1], leading to a large workload. So, Mahler proposed the theory of Random Finite Set (RFS) to solve the problem of unknown and variable number of targets, reducing the computational complexity and ensuring the tracking accuracy[2].
The traditional PHD filter establishes the clutter intensity k
z as a known Poissondistribution process[2]. But in reality, the clutter estimation and analysis will increase the time-consuming. In [3], the clutter was assumed to time-varying parameters, and estimated at each
step. [4] and [5] used the Rayleigh distribution and
distribution to make the clutter modelrespectively. In [6], it proposed a finite hybrid model to describe the density function of the clutter and estimated with Markov chain Monte Carlo algorithm [7]. In [8], the clutter model was estimated using joint state of target and clutter. In [9], it assumed that the multi-target tracking model obeys the Poisson process. In [10] [11], with an unknown prior knowledge, the estimation of the clutter led to a high complexity and much time-consuming.
So we introduce the interval analysis technique, and propose the PHD algorithm based on box particle filter in unknown clutter state.
Spatial Model Establishment
Consider the establishment of mixed space model for algorithm implementation. Defined as follows:
X
where, denotes the mixed space, X denotes the target state space and denotes the clutter
PHD Filtering Algorithm Based on Interval Analysis in Unknown Clutter Environment
The traditional algorithm SMC-PHD [2] and SMC-NPHD algorithm in [11] will cause a significant increase in the amount of computation. So we propose Box-SMC-NPHD to promote the algorithm efficiency.
(1) Initialization
At time k-1, there is a set of weighted box particles
( ), 1 , 1
11
,[ ] k
L i i
P k P k i w
x to prevent new target
producing a large number of newborn particles. According to the previous measurement random set
1
k
Z , the number of new particles will denotes:
, , / 1 , 1, 1
i
k k k k
L L m j …,m (1)
where, mk1 denotes measurements number at time k-1, and x denotes upper integer symbol.
It is generally assumed that the new target is usually present in the measurement position, with a set of uniformly distributed probability density functions, there will be:
, , 1 , 1 | k i k L i k U L
xx z x (2)
where, x i,k denotes box particles of target states,
, i k U x
x denotes uniform distribution of
, i k
x . And the weight of newborn particle is followed by:
( )
, , / , , , ,
i
k k k k k
w p x L iL …,L (3)
where, p,k
x denoted the newborn target probability. The initialized box particle state set consists of the previous momentary surviving part and the newborn part, which is:
1
,( ) ( ) ( ) ( )
1 1 , 1 , 1 , 1 , 1
1 1 1
,[ ] k ,[ ] k ,[ ] k
L L
L
i i
i i i i
k k P k P k k k
i i i
w w w
x x x (4)
And the total number of particle will be Lk Lk1L,k.
(2) Target PHD prediction
Assume the posterior intensity at time k-1 will be:
1 1 ( ) 1 1 k i k L i k k iv w U
xx x (5)
So the predicted intensity can be:
, 1
, , | 1
( ) ( )
| 1 , | 1 ,
1 k k i i k P k k
k L L
i i
k k P k k k
i i L
v w U w U
x xx x x (6)
The weight expression of newborn particle can be:
,
( )
, , / k , |
i i
i
k k k k k k
w x L b x Z (7)
(3) Clutter intensity prediction
1
,
( ) ( )
| 1 1| 1 | 1 , | 1 | 1 , | 1 , | 1 ,
1 | | | [ ] k k k L L i i i i
k k k k k k P k k k k P k k k k k k
i L
v v p w p w p
x
x(4) Target update
The predicted intensity at time k can be:
| 1
| 1
( )
| 1 | 1
1 k k i k k L i
k k k k
i
v w U
x x x (9) The update intensity can be
| 1 ( ) 1 k k i k L i k k iv w U
x x x (10) The update weight can be:
| 1
,k | 1 | 1
( ) ( )
| 1 ,k | 1
0 ( )
, | 1 , | 1 | 1
1 | 1 | k k k i i
D k k k k k
i
i i
k k k D k k L
z i i
D K k k k k z k k k k
i
p g
w w p
p g v w
Zx z x
x
z x
(11) (5) Clutter intensity update
0,k | 1
0
| 1 ,k | 1 0
, | 1
| 1
| k
i
D k k k
i
k k k D k k
z D K k k k k
p g
v v p
p g v C
Z x z x z z (12) (6) Constraint box particlesThe purpose of constraining box particles is to directly remove the area without overlapping. The measurement likelihood of box particle at time k can be:
| 1 | 1
| i i , /
k k k cp k k
g z x h x z x
(13)
| 1 ,
icp k k h
x z denotes the rule to constraint and gets to the new box particle.
(7) Estimation
The number estimation can be:
1 ,
( )
1
ˆ int Lk L k i
k k i L w
(14)where, int
denotes integer rounding symbol.(8) Resampling
Assume Lk represents the number of box particle resampling. Divide the box particles
according to the number of copies of the box particles and normalize the weights. The set of box
particle will be
, ( ),
1
[ ], 1/ k
L
i i
P k P k k
i
w L
x
(9) Target state extraction
The particles are clustered by K-means algorithm and the target state is obtained from the clustering center. Select the particle with the weight greater than a certain threshold, and get the expression of the target state estimate, i.e.
( )
, [ , ] , 1, 2, , ˆ
i i
j P k P k k
i
s
w mid x j LNumeral Studies
In order to verify the effectiveness and feasibility of the algorithm, we compared algorithms of SMC-PHD, SMC-NPHD and the proposed Box-SMC-NPHD.
Parameters
Four moving targets are tracked in the monitoring area and are uniformly linearly moved. The
monitored area is [-150,200]m×[-150,200]m, time interval Ts is 1s, whole time processing is 30s.
target states are represented by x
x x y y, , ,
T. And
x y,
denotes the position and
x y,
denotes the velocity. The target state equation is followed xk Fxk1Γwk , where
1 ,
0 1
s T
Α 0
F Α
0 Α . Process noise variance is Qk diag
0.5 0.5
, the state noise input matrix isT 2
, 2
s s
T T
Β 0
Γ Β
0 Β
, and the initial states of target are x1
50,9, 40, 11
T,
T 2 25,8, 40,10
x ,
T3 10, 7, 75,9
x , x4
100, 7, 150,10
T. And target 1 has a duration of 1 to 8 seconds, target 2has a duration of 7 to 20 seconds, target 3 has a duration of 12 to 35 seconds, target 4 has a duration of 28 to 40 seconds.
The system measurement equation is zk Hxkvk, where 1 0 0 0
0 0 1 0
H , and measured noise
variance is
2 2
2.5 , 2.5 diag
R , interval measurement applies to
k
k 0.6 , k
k 0.4k h h
z x v x v where
21, 25
T, detection probability pD k, 0.98,survival probability ps,k 0.95, newborn probability p,k 0.01.
The clutter is uniformly distributed in the observed area, and the number of measured clutter is
expressed as the mean
of the Poisson distribution. A denotes the monitoring area anddenotes clutter intensity. Clutter detection probability pd0 0.3 , newborn probability
| 1 | 0.05
k k
p x . And the state box particles has the interval values are 6m, 7m and the speed of
1m / s.
Results and Analysis
[image:4.595.209.382.606.741.2]Choose optimal sub-mode distribution (OSPA) as the evaluation criterion. Select the parameter c = 50, p = 2. For each interval, the number of continuous particles is 2000, the number of new particles is 50, the number of continuous particles is 40, and the number of new particles is 1. The simulation carried out 100 Monte Carlo experiments were respectively, and the running time results were analyzed. Interval analysis tools use the INTLAB toolbox.
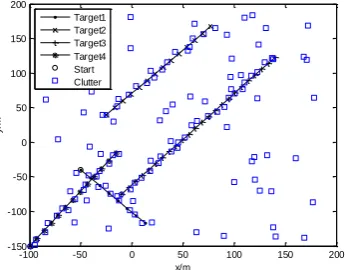
Figure 1. Target trajectory and interval measurement with clutters.
Figure 1 shows the four trajectories of the targets in a clutter environment. The clutter density
values are 3×10-5, 1.5×10-4, 3×10-4 respectively. Assume that the clutter density remains
-100 -50 0 50 100 150 200
-150 -100 -50 0 50 100 150 200
x/m
y/
m
substantially constant over the time interval in which the tracking is performed.
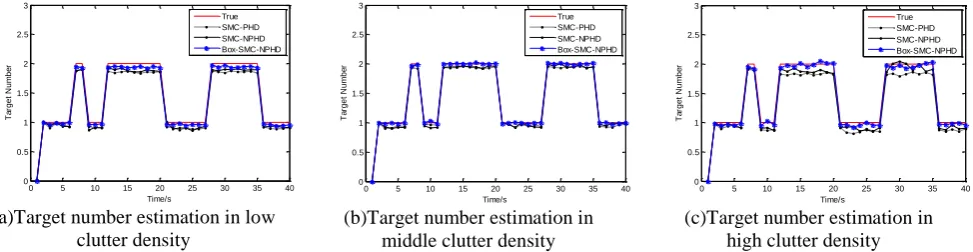
It can be seen from Figure 2 (b), the three algorithms can estimate the number of targets better because the medium clutter density is matched with the traditional PHD filter prior clutter model.
In comparison with Figure 3, the OSPA mean of the first two is basically the same, but at high density clutter, the former is 5.81% lower than the latter. This is because the high density clutter environment is a more pronounced inaccurate measurement.
(a)Target number estimation in low clutter density
(b)Target number estimation in middle clutter density
[image:5.595.63.550.159.285.2](c)Target number estimation in high clutter density
Figure 2. Three filter simulation comparison on target number estimation in different clutter situations.
(a)OSPA distance in low clutter density
(b)OSPA distance in middle clutter density
[image:5.595.68.545.308.413.2](c)OSPA distance in high clutter density
Figure 3. Three filter simulation comparison on OSPA distance in different clutter situations.
[image:5.595.186.407.596.659.2]Table 1 shows the complexity of the three filtering algorithms. It can be seen that the SMC-NPHD is about 20% more than the SMC-PHD, while the box-SMC-NPHD based on the interval analysis is about 1/6 of the SMC-NPHD run time. This is because the number of box particles required for this improved algorithm is much smaller than the remaining two particle filter algorithms. The latter two algorithms based on particle filtering require 2050 particles, because the number of new particles to capture new targets, resulting in a large number of time consumption. Although the improved algorithm based on box particle filtering can take part of the time in interval analysis, only 41 boxes of particles can achieve similar precision to the particle filter algorithm. The large number of particles is reduced so that the algorithm achieves the running time of the significant reduction, thus improving the timeliness and applicability.
Table 1. Three filters comparison on complexity in different clutter situations.
Clutter Intensity
Time/s
PHD NPHD Box-NPHD
3×10-5 15.453 18.516 2.954
1.5×10-4 17.152 20.583 3.287
3×10-4 19.038 23.243 3.976
Conclusion
In this paper, a PHD algorithm based on box particle filtering in unknown clutter environment is proposed. The algorithm uses the box particle weighting method to establish the unknown clutter model by measurement data, derive the target state updating equation, and recursively estimate the target state with box particle PHD filter, which greatly reduces the number of required particles. The simulation results show that the algorithm can effectively reduce the computation time of the algorithm while ensuring the target tracking performance compared with the multi-target particle filter algorithm when the clutter environment does not match the prior model.
0 5 10 15 20 25 30 35 40 0
0.5 1 1.5 2 2.5 3
Time/s
T
a
rg
e
t
N
u
m
b
e
r
True SMC-PHD SMC-NPHD Box-SMC-NPHD
0 5 10 15 20 25 30 35 40 0
0.5 1 1.5 2 2.5 3
Time/s
T
a
rg
e
t
N
u
m
b
e
r
True SMC-PHD SMC-NPHD Box-SMC-NPHD
0 5 10 15 20 25 30 35 40 0
0.5 1 1.5 2 2.5 3
Time/s
T
a
rg
e
t
N
u
m
b
e
r
True SMC-PHD SMC-NPHD Box-SMC-NPHD
0 5 10 15 20 25 30 35 40 0
20 40 60 80
Time/s
O
S
P
A
/m
SMC-PHD SMC-NPHD Box-SMC-NPHD
0 5 10 15 20 25 30 35 40 0
20 40 60 80
Time/s
O
S
P
A
/m
SMC-PHD SMC-NPHD Box-SMC-NPHD
0 5 10 15 20 25 30 35 40 0
20 40 60 80
Time/s
O
S
P
A
/m
Acknowledgement
This research was financially supported by the National Science Foundation (61571458).
References
[1] C. Hue, J.L. Cadre, P. Perez. Sequential Monte Carlo methods for multiple target tracking and
data fusion[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 309-325.
[2] Mahler R. Statistical Multi-source multi-target Information Fusion[M]. Boston: Artech House
Publishers, 2007.
[3] B.T. Vo, B.N. Vo, A. Cantoni. Analytic implementations of the cardinalized probability
hypothesis density filter[J]. IEEE Transactions on Signal Processing. 2007,55(7): 3553-3567.
[4] D. Musicki, M. Morelande, B. L. Scala. No parametric target tracking in non-uniform clutter.
The 8th International Conference on Information Fusion[C]. Philadelphia, USA, 2005, 1-6.
[5] M. G Rutten, N. J. Gordon, S. Maskell. Recursive track-before-detect with target amplitude
fluctuations[J]. IEEE Proceedings: Radar, Sonar and Navigation. 2005,152:345-352.
[6] Lian Feng, Han Chongzhao, Liu Weifeng. Estimating Unknown Clutter Intensity for PHD
Filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010,46(4):2066-2078.
[7] Vo B N, Singh S, Doucet A. Sequential Monte Carlo methods for multi-target filtering with
random finite sets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005,41(4): 1224-1245.
[8] Mahler R, Vo B T, Vo B N. CPHD Filtering with Unknown Clutter Rate and Detection
Profile[J]. IEEE Transactions on Signal Processing, 2011,59(8):3497-3513.
[9] Streit R. Poisson Point Processes: Imaging, Tracking, and Sensing[M]. Heidelberg: Springer,
2010.
[10]Schikora M, Gning A, Mihaylova L, et al. Box-particle Intensity Filter[C]. 9th IET Data Fusion
and Target Tracking Conference. Stevenage: IET, 2012: 1-6.
[11]Li Cunyun, Jiang zhou, Ji Hongbing. Novel PHD filter in unknown clutter environment [J].