International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 12, December 2015)
253
Genetic Algorithms Based PID Controller for Temperature
Control of Shell and tube Heat Exchanger System
Charanjeet Singh
1, Ashok K. Goel
21M. Tech. Student, Department of Electronics & Communication Engineering, Giani Zail Singh Campus College of
Engineering & Technology, Bathinda-Punjab, India
2Professor, Department of Electronics & Communication Engineering, Giani Zail Singh Campus College of Engineering &
Technology, Bathinda-Punjab, India
Abstract—Proportional Integral Derivative (PID) Controllers are widely used in industries to control the output of control systems. The process of calculating proportional gain (Kp), integral gain (Ki), derivative gain (Kd) is called tuning. Many techniques have been developed to tune the gain parameters of PID controller. In this paper, Genetic Algorithms (GAs) are proposed as method for PID tuning to regulate the temperature of outlet fluid of a shell and tube heat exchanger system. Shell and tube heat exchangers are most widely used in chemical processes. The heat exchanger heats up the process fluid using superheated steam supplied by the boiler. The superheated steam flows through the tubes and process fluid flows through shells of shell and tube heat exchanger. Mathematical modeling of shell and tube heat exchanger is performed using experimental data and PID controller is implemented using MATLAB. The performance of GAs based PID controller is compared with Ziegler-Nicholas (ZN) method. Simulation results show that the gains obtained by GAs provide better performance than that obtained by ZN method.
Keywords—PID Controller, Tuning, Genetic Algorithms, Zeigler-Nicholas Method, Shell and Tube Heat Exchanger.
I. INTRODUCTION
Proportional Integral Derivative (PID) controller is widely used in industry because of its effectiveness and simplicity. A PID controller calculates an error value as the difference between a measured process variable and a desired set point. The controller attempts to minimize the error by adjusting the final control element through use of a manipulating signal. The process of calculating proportional gain (Kp), integral gain (Ki) and derivative
gain (Kd) is called tuning. Tuning of PID gain parameters
(Kp, Ki and Kd) continuous to be important as these
parameters has great influence on the stability and the performance of the control system. There are many tuning methods such as Zeigler-Nicholas (ZN) method, Cohen-Coon method, Internal Model Control (IMC) and Iterative Feedback Tuning (IFT). Among these methods, the ZN method works quite well for a wide range of industrial processes.
Apart from conventional tuning methods, there are many soft computing techniques for PID controller tuning, such as fuzzy logic, neural networks and genetic algorithms (GAs).
In this paper, GAs is applied to tune the parameters of PID controller. The objective of PID controller is to control the temperature of outlet process fluid of shell and tube heat exchanger. To show the effectiveness of proposed method, step responses of closed loop system are compared with conventional tuning technique (ZN method).
II. PID CONTROLLER
A PID controller calculates an error value as the difference between a measured process variable and a desired set point. The controller attempts to minimize the error by adjusting the process through use of a manipulated variable. Proportional, integral and derivative terms are summed to calculate the output of PID controller.
A standardPID controller is represented as:
0
1
( )
( )
( ( )
( )
)
t
p d
i
de t
C t
K e t
e t dt T
T
dt
(1)Transfer function of PID controller is given by
1
1
( )
p(1
d)
p i di
C s
K
T s
K
K
K s
T s
s
2
d p i
K s
K s
K
s
(2)Where,
Kp= Proportional gain,
Ki = Integral gain,
Kd = Derivative gain,
Ti = Integral time constant and
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 12, December 2015)
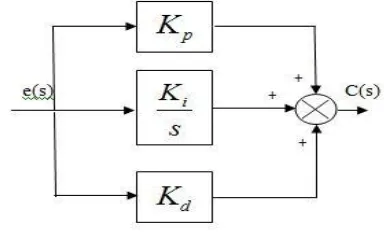
254 Figure 1 PID Controller Structure
The tuning of a PID controller is process of selecting gains Kp, Ki and Kd. For designing a PID controller these
three gains must be tuned to make the closed loop system has optimal response and the response should have minimum possible settling time with small or no overshoot in step response.
III. SHELL AND TUBE HEAT EXCHANGER SYSTEM
Shell-and-tube heat exchangers are probably the most common type of heat exchangers applicable for a wide range of operating temperatures and pressures. Shell-and-tube heat exchangers find extensive use in refrigeration, power generation, heating and air conditioning, chemical processes, manufacturing, and medical applications.
A typical interacting chemical process for heating consists of a chemical reactor and a shell and tube heat exchanger system. The process fluid which is the output of the chemical reactor is stored in the storage tank. The storage tank supplies the fluid to the shell and tube heat exchanger system using a pump and a non returning valve. The heat exchanger heats up the fluid to a desired set point using super heated steam at 180°C supplied from the boiler. The super heated steam comes from the boiler and flows through the tubes, whereas, the process fluid flows through the shells of the shell and tube heat exchanger system. The first assumption is that the inflow and the outflow rate of fluid are same, so that the fluid level is maintained constant in the heat exchanger. The second assumption is the heat storage capacity of the insulating wall is negligible. A thermocouple is used as the sensing element, which is implemented in the feedback path of the control architecture. The temperature of the outlet fluid is measured by the sensor and the output of the sensor (voltage) is sent to the transmitter unit, which eventually converts the sensor output to a standardized signal in the range of 4-20 mA. Thermocouple or Resistance Temperature Detectors (RTD) is used for temperature measurement.
Figure 2 Control Loop for Shell and Tube Heat Exchanger
This output of the transmitter unit is sent to the controller unit. The controller compares that measured value with set point, implements the control algorithm and gives necessary command to the final control element via the actuator unit.
The heat exchanger response to the steam flow has a
gain of 50
C/(kg/sec.) and time constant of 30 sec. The heat exchanger response to the fluid flow has gain of3
C/(kg/sec.) and to the inlet temperature is 1.Transfer Function (TF) of heat exchanger
50
( )
30
1
p
G s
s
(3)TF of flow disturbance,
( )
1
30
1
Q s
s
(4)TF of temperature disturbance,
( )
3
30
1
T s
s
(5)The control valve has maximum capacity of 1.6 kg/sec of the steam, linear characteristics and a time constant of 3 sec.
The nominal pressure of the valve is 3-15 psi
Control Valve Gain,
1.6
0.13
15 3
v
K
TF of control valve,
( )
0.13
3
1
v
G s
s
(6) [image:2.612.328.556.126.307.2] [image:2.612.74.266.135.256.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 12, December 2015)
255 Sensor is calibrated in the range of 50
C to 150
C and time constant is of 10 sec.Sensor Gain,
16
0.16
(150 50)
hK
TF of Sensor,
( )
0.16
10
1
h
G s
s
(7)The process transfer function is represented as
2
5
( )
90
33
1
G s
s
s
(8)The block diagram of control loop of heat exchanger and transfer function model are shown in Figure 3 and Figure 4 respectively.
Figure 3 Block Diagram for Heat Exchanger System
Figure 4 Transfer Function Model of Heat Exchanger
IV. GENETIC ALGORITHMS FOR PID CONTROLLER TUNING
Genetic Algorithms (GAs) is a search optimization technique based on the mechanism of Darwin’s principle of natural selection. The searching process is similar to that in nature where a biological process in which stronger individual is likely to be winner in a competing environment. GAs must be initialized with set of solutions represented by chromosomes called a population.
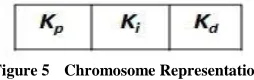
The implementation of GAs for PID tuning starts with the definition of chromosome. As shown in figure 5, chromosome is formed by three values that correspond to the three gains to be tuned in order to get satisfactory response.
Figure 5 Chromosome Representation
The objective function is required to evaluate the best PID controller for the system that gives smallest overshoot, fastest rise time and quickest settling time. Integral of Absolute Error (IAE) is considered as objective function. IAE gets the absolute value of error to remove negative error components. It is good for simulation studies.
0
( )
T
IAE
e t dt
(9)Each chromosome in the population is passed into the objective function one at a time. The chromosome is then evaluated and assigned a number to represent its fitness. The genetic algorithm uses the chromosome’s fitness value to create a new population consisting of the fittest members. Each chromosome consists of three separate strings constituting a P, I, and D term. The newly formed PID controller is placed in a feedback loop with the heat exchanger transfer function.
Basically GAs consists of three basic operations: Selection, Crossover and Mutation.
[image:3.612.380.507.294.334.2] [image:3.612.54.276.355.526.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 12, December 2015)
256
Crossover: Crossover is an operation that imitates the reproduction of living creatures.Crossover exchanges the information among the chromosomes of a population. During crossover a pair of selected chromosomes is randomly chosen. These two chromosomes act as parents. There is a predefined probability; called crossover probability which is the probability that crossover takes place between two chromosomes.
Mutation: Mutation operation imparts small changes at a random position within the chromosome. The mutation operator changes 1 to 0 and vice versa with a small mutation probability.The intention is to empower the GAs process to explore every region of search space adequately.
Figure 6 Optimization Using GAs
The parameters of GAs are taken as follows:
Table 1 Parameters of GAs
Parameter Value
Population Size 100 Bit Length of
Chromosome 10
Number of Generations 100 Crossover Probability 0.8 Mutation Probability 0.05
Selection Method Roulette wheel Crossover Type Single Point
Crossover Mutation Type Uniform
In order to analyze the performance of proposed method in this paper, simulation is conducted using MATLAB.
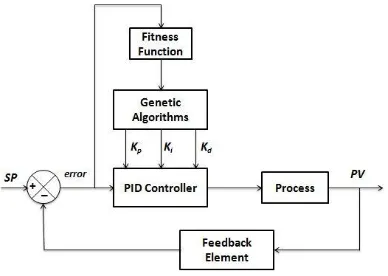
Figure 7 Block Diagram of GAs Based PID Controller
Figure 7. shows block diagram of GAs PID controller. SP stands for set point and PV stands for process variable.
V. SIMULATION RESULTS
This section evaluates the performance of proposed method of PID controller tuning. Simulation has been performed for the evaluation of the PID controller tuning method with plant (Shell and Tube Heat Exchanger system) which is described by equation (8).
2
5
( )
90
33
1
G s
s
s
Following step response parameters are used for performance evaluation:
Rise Time: It is the time required for a signal to reach from 10% to 90% of the final value.
Overshoot: It is the normalized difference between the time response peak and steady output. The maximum percent overshoot is defined as:
( ) ( )
% 100
( ) p p
C t C M
C
[image:4.612.348.542.166.304.2] [image:4.612.76.263.288.417.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 12, December 2015)
257 Figure 8 Step Response of ZN Method Based PID Controller
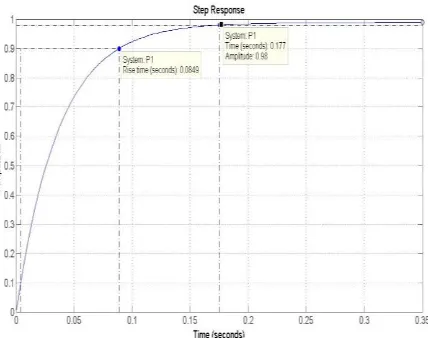
Figure 9 Step Response of GAs Based PID Controller
Figure 7 and 8 shows the step responses of ZN method based PID controller and GAs based PID controller.
[image:5.612.58.279.138.321.2]Table 2 shows the comparison of performance and optimal parameters of PID controller using ZN and GAs method.
Table 2
Comparison of PID Controller Tuning Method
Parameter ZN-PID GAs-PID
Kp 25.7 24.9
Ki 5.86 0.069
Kd 27.8 483.8
Rise Time (sec.) 0.8560 0.0848
Settling Time (sec.) 5.3019 0.1752
Settling Min (sec.) 0.9197 0.9023
Settling Max (sec.) 1.1676 0.9886
Overshoot (%) 16.7598 0
Peak Time (sec.) 2.2821 1.1328
VI. CONCLUSION
This paper has proposed a PID controller tuned using GAs for shell and tube heat exchanger. From simulation results it is concluded GAs based PID tuning method gives superior performance than that of conventional ZN tuning method. Rise time, settling time and peak overshoot are three main parameters for analyzing the performance of PID controller. The objective of PID controller is to regulate the temperature of outlet fluid of shell and tube heat exchanger in shortest possible time and small or no overshoot. ZN based PID controller shows 16.7598% overshoot and 5.3019 sec. settling time whereas GAs based PID controller shows 0% overshoot and 0.1752 sec. settling time. GAs provides 100% improvement in overshoot.
REFERENCES
[1] Kiam Heong Ang and Gregory Chong “PID control system analysis, design, and technology”, IEEE Transactions on Control Systems Technology, Vol. 13, No. 4, 2005.
[2] M. K. Tan, Y. K. Chin, H. J. Tham and K. T. K. Teo, “Genetic Algorithm Based PID Optimization in Batch Process Control”, IEEE International Conference on Computer Applications and Industrial Electronics, 2011.
[image:5.612.62.276.344.513.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 12, December 2015)
258 [4] Mehmet Korkmaz, Omer Aydogdu and Huseyin Dogan, “Design and
Performance Comparison of Variable Parameter Nonlinear PID Controller and Genetic Algorithm Based PID Controller”, IEEE Innovations in Intelligent Systems And Applications, 2012
[5] Abhishek Singh and Dr. Veena Sharma, “Concentration Control of CSTR Through Fractional Order PID Controller by Using Soft Techniques”, IEEE Computing, Communication and Networking 2013.
[6] Subhransu Padhee, “Controller Design for Temperature Control of Heat Exchanger System: Simulation Studies” WSEAS Transactions on System and Control, Vol. 9, 2014.
[7] A. Jayachitra and R. Vinodha, “Genetic Algorithm Based PID Controller Tuning Approach for Continuous Stirred Tank Reactor” Hindawi Publishing Corporation, Advances in Artificial Intelligence, 2014, Article ID 791230.
[8] Jaison John, C. Sathish Kumar, “A Comparative Study of Genetic Algorithm and Particle Swarm Optimization based Optimization of PID Controller Parameters” International Journal of Soft Computing and Engineering, Vol. 4, Issue-5, November 2014.
[9] Subhadip Samanta, “Genetic Algorithm: An Approach for Optimization (Using MATLAB)” International Journal of Latest Trends in Engineering and Technology, Vol. 3 Issue 3, 2014. [10] S.Abirami, Zahir Husain, A. Saravana, Aravind Kumar,
“Performance Comparison of Different Controllers for a Level Process”, International Journal of Engineering Research and Applications, Vol. 4, Issue 3, 2014.