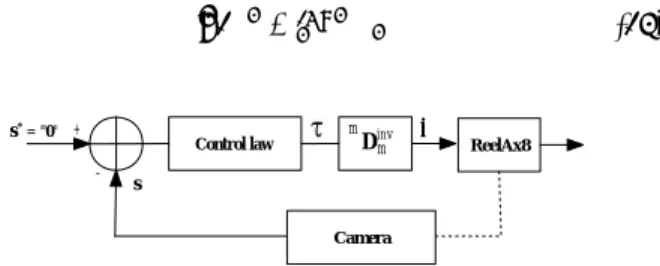
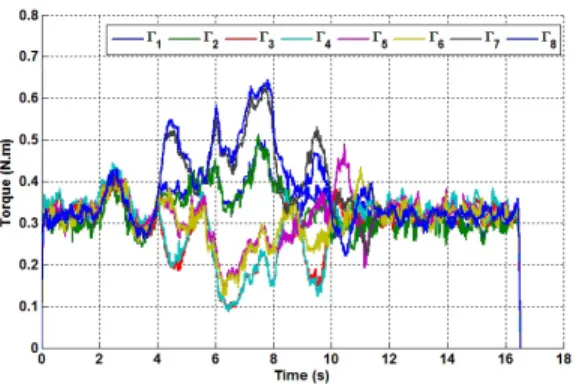
Towards vision-based control of cable-driven parallel robots
Full text
Figure


Related documents
The main purpose of this study was to develop a visualisa- tion model of contamination using linear and nonlinear mathe- matical methods that combine a sparse chemical analysis and
• Under current HIPAA requirements, a patient has a right to request to restrict the use and disclosure of his/her PHI for treatment, payment, and health
Keywords : Convex optimization, coordinate relaxation, worst-case efficiency estimates, fast gradient schemes, Google problem.. 1 Université catholique de Louvain, CORE
The negative association between age (or self-rated health) and suicidal ideation or at- tempt was also weaker for those with depressed mood than for those without such experience
The CEO and Director of Education and Programs expressed the following desires related to the board: higher attendance at board meetings, higher attendance of board members at
However, SaaS architecture reflects a paradox--SaaS clients get advantages from SaaS use, including low installation cost and switching cost, reduced uncertainty pervading tradition
Mail Fax: Undeliverable Mail: (336) 521-1409 Fax: (336) 419-4400 NO NONE NO INACTIVE NO NONE NO YES NO NO Common Authority: Contract Authority: Broker Authority: Property:
In order to compare the regional difference of tissue clearing efficiency, we measure the mean free path change due to Clear T according to brain region. After the tissue
