Theses
Thesis/Dissertation Collections
11-18-2005
Hyperspectral sub-pixel target detection using
hybrid algorithms and Physics Based Modeling
Emmett J. Ientilucci
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Dissertation is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for
inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
Recommended Citation
by
Emmett
J.
Ientilucci
A.A.S.Monroe Community College, 1986
B.S
.
Rochester Institute of Technology
,
1996
M.S. Rochester Institute of Technology
,
1999
A dissertation
submitted
in partial fulfillment
of
the
requirements for the degr
ee
of Doctor
of
Philosophy
in the Chester F. Carlson Center for Imaging Science
Rochester Institute
of
Technology
November 18, 2005
Emmett lentilucci
Signature of the Author
_ _ _ _ _ _ _
. _ _ _ _ _ _ _ _ _ _ _ _
_
Accepted by
Name Illegible
/(
ROCHESTER, NEW YORK
CERTIFICATE OF APPROVAL
Ph.D.
DEGREE DISSERTATION
The Ph.D. Degree Dissertation of Emmett J. Ientilucci
has been examined and
approved
by the
dissertation
committee
as
satisfactory for the
dissertation required for the
Ph.D. degree
in Imaging Science
John R. Schott
Dr. John R. Schott
, Dissertation Advisor
Harvey E. Rhody
Dr. Harvey E. Rhody
John P. Kerekes
Dr. John P. Kerekes
P. 8ajorski
Dr. Peter Bajorski
/1
/;
1
/2c;J~)
7--Date
7
/
Title of
Dissert
ation:
Hyperspectral Sub-Pixel Target Detection Using Hybrid Algorithms
and Physics Based Modeling
I, Emmett J
. Ientilucci, hereby grant permission to Wallace Memorial
Library of
R.I.T
. to reproduce my
thesis in
whole or in part
.
Any
reproduction will not be for
commercial
use
or
profit.
Emmett lentil ucci
11-"
{)"O C
Signature _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
---=.
II
...
L
_-""
(2
'---=/
'--___
_
Date
by
Emmett J. Ientilucci
Submitted
to the
Chester F. Carlson Center for
Imaging
Science
in
partialfulfillment
ofthe
requirementsfor
the
Doctor
ofPhilosophy
Degree
at
the
Rochester Institute
ofTechnology
Abstract
This
thesis
develops
a newhybrid
target
detection
algorithm calledthe
Physics
Based-Structured
InFeasibility
Target-detector
(PB-SIFT)
whichincorporates Physics
Based
Modeling
(PBM)
along
with a newStructured
Infeasibility
Projector
(SIP)
metric.
Traditional
matchedfilters
are susceptibleto
leakage
orfalse
alarmsdue
to
bright
or saturated pixelsthat
appeartarget-like to
hyperspectral detection
algorithms
but
are nottruly
target.
This detector
mitigates against suchfalse
alarms.More
oftenthan not,
detection
algorithms are appliedto atmospherically
compensated
hyperspectral
imagery.
Rather
than
compensatethe
imagery,
wetake the
opposite approach
by
using
a physicsbased
modelto
generate permutations of whatthe target
mightlook like
as seenby
the
sensorin
radiance space.The
development
and status of such a method
is
presented as appliedto the
generation oftarget
spaces.
The
generatedtarget
spaces aredesigned
to
fully
encompassimage
tar
get pixels while
using
alimited
number ofinput
model parameters.Evaluation
ofsuch
target
spaces showsthat
they
can reproduce aHYDICE image
target
pixelspectrum
to
less
than
1% RMS
error(equivalent
reflectance) in
the
visible andless
The SIP is developed along
with aPhysics
Based Orthogonal Projection
Op
erator
(PBosp)
which produces a2
dimensional decision
space.Results from
the
HYDICE FR I data
set showthat the
physicsbased
approach, along
withthe
PB-SIFT
algorithm,
can out performthe
Spectral Angle
Mapper
(SAM)
andSpectral
Matched Filter
(SMF)
onboth
exposed andfully
concealed man-madetargets
found
in
hyperspectral imagery.
Furthermore,
the
PB-SIFT
algorithm performs as goodWe
allhave
milestonesin
ourlives
andpursuing my
Ph.D.
was one ofthem.
I
can rememberthe
day
that
changed all subsequentdays
like it
was yesterday.After
completionofmy
M.S.
degree,
I
wasto
askDr. John Schott
about potentialemployment opportunities.
Since
I
neededto stay
local
atthe time
and no one washiring,
he
suggested wetalk
about other endeavorsin
his
car on ourway to
Toys
"R"Us,
Inc. That's
whenhe
suggestedentering the
doctoral
program,
whichI
(previously)
neverconsidered.I
took the
weekendto think
aboutit
and some number of yearslater,
here I
amwriting this commentary
in
my
completeddissertation. That
10
minute conversation changedthe
rest ofmy life. Thanks Dr. Schott for
your years ofinput
andmentoring
onboth
personaland academicissues.
I
wouldalsolike
to
acknowledgemany
ofmy
colleges andfriends
who sat with me overthe
yearsto
discuss
such matters relatedto
this
body
of work.Specifically,
these
these
include Alex
Tyrrell,
Dave
Messinger,
Rolando
Raqueno,
andScott Brown.
Thanks for
lending
me your ears.Thanks
goesto
Cindy
Schultz
whopretty
much runs ourdepartment
and provided general support.
Thanks for
helping
me with allthe
logistical
organization of committeemeetings,
etc.Getting
them
together
onthe
samedate
waslike
herding
abunch
ofstray
cats!A
specialthanks to my
girlfriendSherry
for supporting
methroughout this
dissertation.
Finally,
I
wouldlike
to thank my
committeemembers;
Dr.
Peter
Bajorski,
Dr.
John Kerekes
andDr.
Harvey Rhody
who provided additionalinsight
andtook the
time to
readmy dissertation.
You
allhad
something
valuableto
offer.Thanks.
Symbol
Description
a
Abundance
orfractional
weight scalara
Abundance
orfractional
weight vectord
Un-target-like
vector_E[x]
Expected
valueof xK(x)
Exoatmospheric irradiance
FA
False
alarmGLR
Generalized likelihood
ratio.Ho
Null
hypothesis
Dai
Alternative hypothesis
INF
Infeasibility
Ld(X)
Spectral downwelled
radianceLS(X)
Spectral
radianceLu(\)
Spectral
upwelled radianceL
Radiance
vector(x)
Likelihood
ratioA
Diagonal
matrixLR
Likelihood
ratioM
Miss
MTMF
Pb
Pt
N(fi.E)
P
Pxr(A)
ROC
E
S
at
T_4CE
2~_4MF
Tad
TpBosp
TcEM
Tftmf
Tglr
tGosp
-t GospsTmf
t MFjmc t MFjntyrmTmfwn
Mixture
tuned
matchedfilter
Background
mean vectorTarget
mean vectorNormal distribution
with mean vectorp
and covarianceE
Projection
operatorOrthogonal
projection operatorSpectral
reflectanceReceiver
operating
characteristic(ROC)
curveCovariance
matrix(population)
Covariance
matrixSolar
zenith angleTarget
spectrum(bold
for
vector)
Adaptive
coherence estimatorAdaptive
matchedfilter
Anomaly
detector
Physics based
orthogonal subspace projectorConstrained
energy
minimizationFinite
tuned
matchedfilter
Generalized likelihood
ratiodetector
Generalized
orthogonal subspace projectorGeneralized
orthogonalsubspaceprojector,
for
singlevectorMatched filter detector
orFisher's linear
discriminant
Matched filter detector
on mean-centereddata
Normalized
matchedfilter detector
Tqd
Quadratic
detector
Tsip
Structured
infeasibility
projectorTsmf
Spectral
matchedfilter
x
Pixel
spectrum(bold
for vector)
Ti(A)
Spectral
atmospherictransmission
sun-to-target path72(A)
Spectral
atmospherictransmission target-to-sensor
pathw
Image
vectorin
normalized, mean-centered,
whitened spacew
Vector
of residualsto
accountfor
noise andlack
offit
wt
Target
vectorin normalized, mean-centered,
whitened spaceLists
ofFigures
xxviiiLists
ofTables
xxix1
Introduction
1
1.1
Remote
Sensing
andSpectroscopy
1
1.2
Hyperspectral Application Areas
4
1.3
Hyperspectral Target Detection:
Considerations
4
1.4
Research
Overview: Work
Statement
6
2
Background
8
2.1
Signal Detection
Theory
9
2.1.1
Hypothesis
Testing
andthe
Likelihood Ratio
(LR)
10
2.1.2
The Neyman-Pearson
Approach
12
2.1.3
Generalized
Likelihood Ratio
13
2.2
Estimation
ofTarget
andBackground
Spaces
13
2.2.1
Stochastic Methods
14
2.2.2
Stochastic Models
16
2.2.3
Geometric
Methods
19
2.2.4
Geometric
Models
23
2.3
Approaches
to
Target Detection
25
2.3.1
Full-Pixel Target Detection
Algorithms
26
2.3.2
Sub-Pixel Target Detection Algorithms
29
2.4
Target
Spaces
andPhysics Based
Modeling
(PBM)
35
2.4.1
The Invariant Algorithm: An Application
ofPBM
35
2.4.2
An Illumination Variant Example
36
2.4.3
Target Space Considerations: Clouds
45
2.5
Hybrid Approaches
46
2.5.1
Finite Target Matched Filter
(FTMF)
47
2.5.2
(Stochastic)
Mixture Tuned Matched Filter
(MTMF)
49
2.6
Background
Summary
58
3
New Approach
60
3.1
Improved
Modeling
of aTarget
Space
61
3.1.1
Variation in
Visibility
(VIS)
61
3.1.2
Variation in
Ground
Topography
63
3.1.3
Water
Vapor
(WV)
64
3.1.4
Variation
in
Target
Orientation
70
3.1.5
Variation
in
Downwelled Radiance
72
3.1.6
Summary
ofTarget
Space
Modeling
73
3.2
PB-SIFT Algorithm
74
3.2.1
Physics Based OSP Matched Filter
(PBosp)
75
3.2.2
Structured
Infeasibility
Projector
(SIP)
78
3.2.3
2-Dimensional
Decision
Space
80
3.3
Hyperspectral
Image
Data
82
3.3.1
HYDICE FRI Data
82
3.3.2
FRI
Data
Preprocessing
83
3.4
Algorithm Comparison
andMethods
ofAssessment
87
4
Results
90
4.1
Target Space Generation
91
4.1.1
Creating
Target
Spectra
Using
MODTRAN
92
4.1.2
Non-Varied MODTRAN Parameters
93
4.1.3
Varied
MODTRAN Parameters
96
4.1.4
Generating
aTarget Space
106
4.1.5
Summary
ofTarget Space Generation
andCalibration Issues
.110
4.1.6
Target
Space
Evaluation
113
4.2
Target
andBackground Endmembers
116
4.2.1
Target Endmembers
117
4.2.2
Background Endmembers
117
4.3
Detection Results For
PBosp, SMF,
SAM
120
4.3.1
FR I Exposed
Imagery
Results
120
4.3.2
FR I
Concealed
Imagery
Results
131
4.4
Comparison
ofPB-SIFT
andMTMF
140
4.4.1
Noise Estimate
andMNF Transform
141
4.4.2
Infeasibility
(INF)
Images
144
4.4.3
2 Dimensional Decision
Spaces
153
4.4.4
Improved Performance
Varying
Threshold
ofSIP
162
4.5
Pixel Behavior in 2D Decision
Space
166
4.5.1
Target Pixel Behavior
166
4.5.2
Saturated
Pixel Behavior
169
5
Conclusions
andRecommendations
172
5.2
Specific
Research Conclusions
173
5.3
Recommendations
andFuture Work
177
5.3.1
Physical
Modeling
andTarget
Spaces
177
5.3.2
Detection
179
A
Singular Value Decomposition
181
B
Maximum Noise Fraction
(MNF)
185
B.l
Maximum Noise Fraction
(MNF)
185
B.2
Noise Adjusted Principal Components
(NAPC)
186
B.2.1
Implementation
188
C
Sum
ofVariances in
aLinear Mixture
190
D
Geometry
andthe
Linear
Mixing
Model
(LMM)
192
1.1
Overview
of collection capabilities of ahyperspectral
sensor system.Shown
are materialswithdistinctive
spectroscopic characteristics obtainedthrough the
many band
or channelsthe
instrument
collects[49]
3
2.1
Typical
target
detection
processshowing
adetection
map
for
the
3 input
target
spectra10
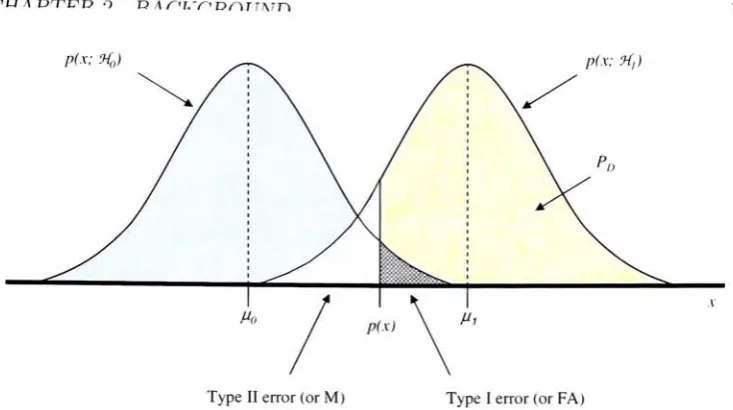
2.2
Probability density
functions
for hypothesis
testing
problemshowing
errorsand
probability
ofdetection
Pp
11
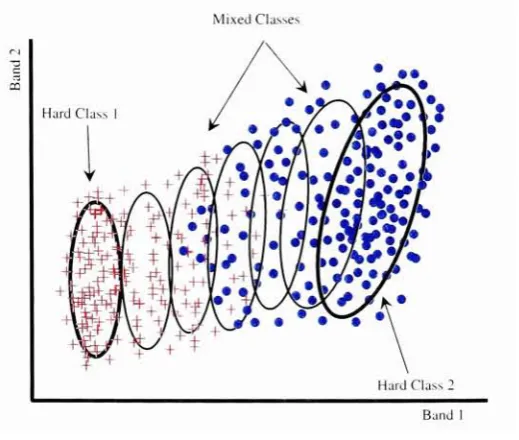
2.3
Illustration
ofthe
stochasticmixing
model(SMM)
conceptfor
a simple2
class,
2
band
case.Drawn
areisoprobability
contoursillustrating
clusters associated withhard-endmember
classes and mixed pixel classes19
2.4
Illustration
ofthe
convexhull
asbeing
the
minimal convex set encompassing
the
data
20
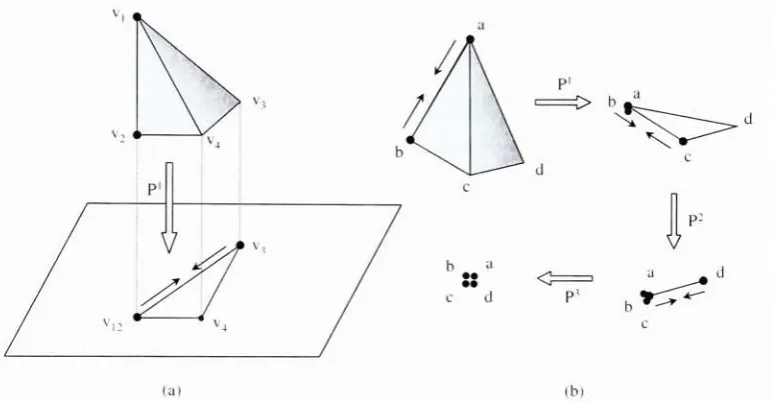
2.5
Illustration
of(a)
the
preservation ofvertices ofa simplexthrough
projection
ofadata
set ontothe
difference in
two
verticesof a simplex and(b)
the
conceptof maximumdistance
determination
and sequential projectionto
find
the
vertices of a simplexspanning
the
data
space24
2.6
Normalized HYDICE
spectrafor
panel made of green cottonfabric. The
solid
line
representsthe
spectral radiance ofthe
panelin
direct
sunlight whilethe
dotted
redline
showsillumination
effectswhenthe
panelwasin
the
shade37
2.7
False
alarms(yellow
pixels)
whenfinding
the
F3
spectrum as measuredin
direct
sunlightin
animage
wherethe
(same)
panelis
placedin
the
shade.The SAM
algorithmwasused(in
radiancespace)
with athreshold
of0.26
radians.
The
white circle arearefersto the
location
ofthe
F3
target
in
the
shade.
Notice
nodetects in
this
region38
2.8
Average
error as afunction
ofnumberofbasis
vectors[14]
42
2.9
Experiment in
whicha spectrometeris
pointedin
the
direction
ofthe
Sun. Black line is
the
normalized radiancein
the
absence of a cloudwhile subsequent measurements arerepresentative of a cloud
passing
in
front
ofthe
Sun
46
2.10
Illustration
of spectral matchedfilter
(SMF)
parametersin 3
bands
of anMNF
space.The background data has
covarianceA
whilethe target's
covariance
is
the
identity
I,
sincetarget
variability
wasstrictly based
on noisein
the
original space.The
target
location
relativeto
the
background
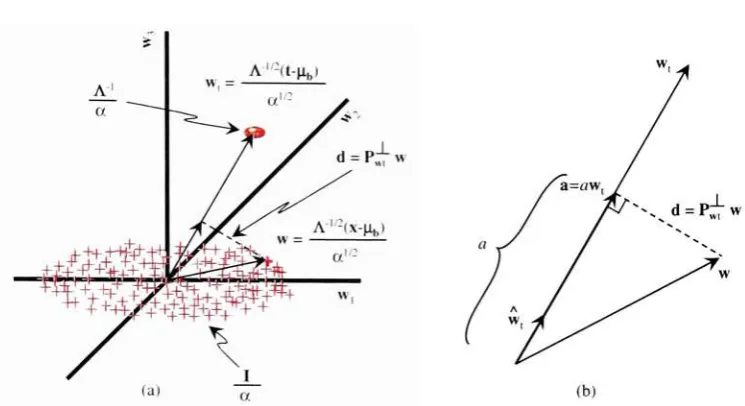
2.11 Illustration
ofSMF
in
normalized whitenedw-space.(a)
Shows
the
projection
of a sample pixelwontothe target
vectorwt to
yieldthe
abundancea.
We
alsoillustrate
the
orthogonalprojectiond.
Additionally,
the
back
ground
data
nowhas
the
covariance of a scaledidentity
matrix(circular
distribution)
whilethe target
data
covarianceis
a scaled version ofthe
diagonal
background
data,
(b)
Illustrates
the
quantities associated withthe
abundancein
moredetail
53
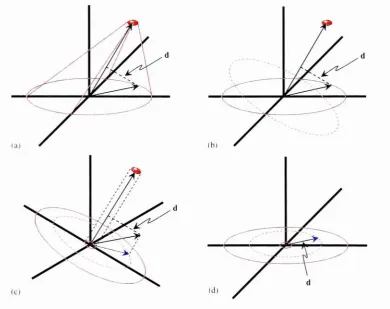
2.12
(a)
Geometric
coneformed
by
target
andbackground data,
(b)
Rotation
and
(c)
projection ofthe target
andbackground
data
in (a),
(d)
The
projected
d
vector55
2.13
(a)
Cone
and contourlines defined
by
s whichis
afunction
ofa,a(t)
and cr(b).(b)
Illustration
oftwo
samplespixels, wi
andW2,
withdifferent
abundancesbut
the
same magnitudesfor
the
d
vectors.However,
the
infeasibility
willbe
greaterfor
pixel1
than
pixel2
57
3.1
Atmospheric
carbondioxide
mixing
ratiosdetermined from
the
continuousmonitoring
programsatthe
4
NOAA
CMDL baseline
observatories[18].
.64
3.2
Absorption
spectra of(a)
H20,
(b)
03,
(c)
CO,
(d)
C02,
(e)
CH4,
(f)
N20,
and(g)
O2
as afunction
ofwavelength\jj.m].
We
can seethat
of allthe
atmosphericconstituents,
H2O is
the
largest
contributorto
absorption.66
3.3
MODTRAN
atmospheric water vapor profilesfor
the
first
10 km
ofthe
atmosphere
68
3.4
Process
ofobtainMODTRAN
water vaporscalefactors
using
resultsfrom
physics-based water vaporestimation routines
70
3.5
Illustration showing
the
difference between
the
zenithanglea'
and
target
3.6
Illustration
of shapefactor
conceptwheretarget
is
notcompletely
exposedto the
hemisphere
abovedue
to
anobscurationsuch as atree, for
example.73
3.7
Illustration
ofbackground
mixing
model as appliedto test
pixel x.(a)
The
test
pixelxproduces an errorvectore ofzerobecause
the
background
model provides a good
fit. Thus
the
pixelis
very
background-like making
the
abundancea zeroaswell,(b)
The background
modelis
less
appropriatefor
test
pixel x.The large
errorimplies
the test
pixelis
notbackground-like
which can produce a
larger
projections ontothe target
vectorproducing
significant abundances
76
3.8
Illustration
of a possiblefalse
positiveusing
a matchedfilter.
In
(a)
the
image
pixel xis
closeto
the target
andresultsin
an abundancevector a.In
(b), however,
it is
questionable asto
whetherthe
image
pixelis
closeto
the target
eventhough
it
producesthe
same abundance-like value asin
(a).
79
3.9
Illustration
ofthe
structuredinfeasibility
concept ashyper-cones.
For
simplicity
here,
weassumethe target
spaceis
a singlevector(i.e.,
T
=>t).
(a)
The
projection of apixel xontothe
background B
producesvector ewhich
is
then
projected ontotarget
t to
produce an abundance-likevectora.
Additionally,
we can generate a vector projection orthogonalto the
target
termed
d.
(b)
Shows
that
wecan getthe
same abundancevectorfor
a "family" of possible
pixels,
all ofwhich,
however,
have
different
d
values,
which we can
take
advantage ofin generating
a structuredinfeasibility
3.10
Illustration
of2
dimensional
decision
map.In
(a)
the
most probabletar
get pixels are
those
withlarge
abundances and smallinfeasibilities
(SIP
values).
In
(b)
we showthe
expectedstatisticalbehavior
ofthe
SIP
valuesas a
function
oftarget
abundance81
3.11
150
x250
subsetfrom
the
larger FR
I,
phaseI,
fully
exposeddata
set. . .83
3.12
250
x300
subsetfrom
the
larger FR
I,
phaseIII,
fully
concealeddata
set.84
3.13
Peak
normalized radiance spectrumshowing
regions(in
red)
wheredata
wasomitted
leaving
170
working
bands
86
3.14 Sub
section(150
x250)
ofHYDICE FR I
exposedimage showing locations
and
labeling
oftarget
panels.The
magenta pixels are associatedwithfull
pixelswhilethe
red pixelsdenote
sub pixeltargets.
The
yellowpixels are referredto
as "guard" pixels and are not consideredtarget
pixels86
3.15 Sub
section(250
x3000)
ofHYDICE FR I
fully
concealedimage showing
locations
andlabeling
oftarget
panels.For
this
research we attemptto
find
the
F3
panel whichis denoted
by
the
red andyellow pixels87
3.16
Plot showing ELM'ed derived
reflectancesfor
varioustargets that
look
similar
to that
ofpanelF3. It
canbe
seenthat
panelF5 is
most similarto
F3,
though
slightly
reducedin
magnitude88
4. 1
General location
of collection site(middle
right ofimage)
relativeto
Bal
timore,
MD
95
4.2
Variation in
visibility,
as seenby
the sensor,
using
a rural extinction model.The
radiance spectrainclude
the target
(F3)
reflectance and arefor
afixed
elevation,
water vapor scalefactor,
andTOD
factors
for
the
fully
4.3
Variation
in
visibility,
as seenby
the sensor, using
a urban extinctionmodel.
The
radiance spectrainclude
the target
(F3)
reflectance and arefor
afixed
elevation and watervaporscalefactor,
andTOD factors
for
the
fully
exposed collect98
4.4
Variation in
visibility,
as seenby
the sensor,
using
amaritime extinctionmodel.
The
radiance spectrainclude
the target
(F3)
reflectance and arefor
afixed
elevation andwater vaporscalefactor,
andTOD
factors for
the
fully
exposed collect.We
seethe
sametrends
aswiththe
rural extinctionmodelexcept
for
much morescattering
98
4.5
Variation in
the
groundtopography
parameter as configuredin
MOD
TRAN. The
sensorheight is 1.56 km.
We have additionally factored in
variation
due
to
scene elevation of50
feet
101
4.6
Variation in
sensorreaching
radianceasthe
groundtopography
parameteris
altered(H2).
For
this
plot wefixed
the visibility to
be 20
km,
used aruralextinction
model,
and setthe
sensorheight
to
1.56
km
102
4.7
Plot showing
variationin
sensorreaching
radiance as afunction
ofwater
vaporscalefactor.
Atmospheric
model used wasthat
of mid-latitudesummer with a
visibility
of30
km
103
4.8
Estimation
of per pixeltotal
column water vaporusing
the
FLAASH
algorithm
104
4.9
Histogram
ofwater vapormap
producedby
the
FLAASH
algorithm. . . .105
4.10
Plot
showing the
linear
dependence
of water vapor scalefactor
to total
4.11
(a)
Illustrates
a180
vectortarget
space generatedfor
the
fully
exposedimagery
while(b)
shows a180
vectortarget
spacefor
the
fully
concealedimagery. Over
plottedin
both
target
spacesis
anactualimage derived
F3
target
pixel112
4.12
(a)
Plot showing
absolute calibration correctionfactor
(red
line)
andthe
result of
multiplying
such a correctionfactor
to
anF3
pixelin
the
fully
concealed
imagery,
(b)
Shows
the
sametarget
spacein
Figure
4.11(b)
except with
the
calibratedF3
pixel over plotted ontothe
fully
concealedtarget
space113
4.13
Estimation
oftarget
image
pixelusing
physically derived
target
vectorsfor
the
(a)
exposed and(b)
fully
concealeddata
sets115
4.14
Plotting
the
reflectance normalizeddifference between
the target
image
pixeland
target
pixelestimateusing
physicsbased modeling for both
the
(a)
exposed and(b)
concealeddata
sets115
4. 15
Cumulative RMS
erroras afunction
ofwavelengthfor both
the
(a)
exposedand
(b)
concealeddata
sets.The
last
valuein
these
plotsis
the total
RMS
error
116
4.16
Plot
showing
7
endmembers extractfrom
the target
spaces generatedfor
the
(a)
fully
exposed and(b)
fully
concealedimage
data
sets117
4.17
Target labeled FR I
exposedimage.
The
targets
arein
columns,
aboveand
below
eachlabel
121
4.18
Results
afterapplying the
SAM
algorithmto the
FR
I
exposeddata
set.The
rawtest
statisticimage
(a)
(map
ofangles)
canbe
seen nextto
a4.19
Results
afterapplying
the
SMF
algorithmto
the
FR I
exposeddata
set.The
rawtest
statisticimage
(a)
canbe
seen nextto
a version with athreshold
applied(b)
.For
the
SMF
algorithmhigh
values(bright
pixels)
are equivalentto the
most probabledetects
124
4.20 Results
afterapplying
the
PBosp
algorithm, using
7
basis
vectors, to the
FR I
exposeddata
set.The
rawtest
statisticimage
(a)
canbe
seen nextto
a versionwith athreshold
applied(b).
For
the
PBosp
algorithmhigh
values or abundances
(bright
pixels)
are equivalentto the
most probabledetects
125
4.21
Results
afterapplying
the
PBosp
algorithm, using the
meantarget
spacevector, to the
FR I
exposeddata
set.The
rawtest
statisticimage
(a)
can
be
seen nextto
a versionwithathreshold
applied(b). For
the
PSosp
algorithm
high
values or abundances(bright
pixels)
are equivalentto the
mostprobable
detects
126
4.22 ROC
curvesfor
the
SAM, SMF, PBosp
algorithms,
as appliedto the
FR I
exposed
data
set.The SAM
andSMF
algorithms usedELM data. Shown
are results plottedusing
(a)
linear
and(b)
log
scales.For
the
log
scalein
(b),
the
curves startfrom
the
left
whenthe
detector
encountersthe
first
false
alarm(FA). That
is,
sincethere
is
no"zero",
the
curves appear(or
start)
whenthe
detector
encounters aFA. For
the
PBospjmean case,
the
first FA is
encountered around2.5
10~24.23 ROC
curvesfor
the
SAM, SMF, PBosp
algorithms,
as appliedto the
FR
I
exposeddata
set.The SAM
andSMF
algorithms usedATREM data.
Shown
are results plottedusing
(a)
linear
and(b)
log
scales.For
the
log
scale
in
(b),
the
curves startfrom
the
left
whenthe
detector
encountersthe
first false
alarm(FA)
130
4.24
ROC
curvesfor
the
SAM, SMF, PBosp
algorithms,
as appliedto the
FR
I
exposeddata
set.The SAM
andSMF
algorithms usedFLAASH data.
Shown
are results plottedusing
(a)
linear
and(b)
log
scales.For
the
log
scale
in
(b),
the
curves startfrom
the
left
whenthe
detector
encountersthe
first
false
alarm(FA). That
is,
sincethere
is
no"zero",
the
curves appear(or
start)
whenthe
detector
encounters aFA
131
4.25
Target labeled
subsection(250
x300 pixels)
ofthe
larger FR I
concealedimage
132
4.26
Results
afterapplying
the
SAM
algorithmto the
FR I
concealeddata
set.The
rawtest
statisticimage
(a)
(map
ofangles)
canbe
seen nextto
a version with athreshold
applied(b).
For
the
SAM
algorithmlow
values(dark
pixels)
areequivalentto the
most probabledetects
134
4.27
Results
afterapplying
the
SMF
algorithmto
the
FR I
concealeddata
set.
The
rawtest
statisticimage
(a)
canbe
seen nextto
aversionwith athreshold
applied(b).
For
the
SMF
algorithmhigh
values(bright
pixels)
4.28 Results
afterapplying
the
PBosp
algorithm,
using 7 basis
vectors, to the
FR
I
concealeddata
set.The
rawtest
statisticimage
(a)
canbe
seen nextto
a versionwith athreshold
applied(b).
For
the
PBosp
algorithmhigh
values or abundances(bright
pixels)
are equivalentto the
most probabledetects
137
4.29 Results
afterapplying
the
PBosp
algorithm,
using
the
meantarget
spacevector, to the
FR
I
concealeddata
set.The
rawtest
statisticimage
(a)
canbe
seennextto
aversion with athreshold
applied(b). For
the
PSosp
algorithmhigh
values or abundances(bright
pixels)
are equivalentto the
most probable
detects
138
4.30
ROC
curvesfor
the
SAM, SMF, PBosp
algorithms,
as appliedto
the
FR I
concealeddata
set.Shown
areresultsplottedusing
(a)
linear
and(b)
log
scales
140
4.31
HYDICE image
usedto
obtain sensor noiseestimate.A 1000
sampleregion overwater,
located in
the
lower
left
ofthe
image,
wasusedto
asinput
to
ENVI's MNF
procedure142
4.32
(a)
Shows
the
2 dimensional
correlation matrix ofthe
noise statisticsfile
associated withthe
water region while(b)
illustrates
the
sharp fall
offin
variance associated withthe
first 10 MNF
bands,
as appliedto the
ELM'ed
4.33
Infeasibility
resultsfrom ENVI's
MTMF
algorithm as appliedto the
FR
I
exposeddata
set compensated withELM.
Here,
wehave
keep
allMNF
bands.
The
rawtest
statisticimage
(a)
canbe
seen nextto
a version(b)
with athreshold
applied, showing
the
first
1500
scores.For
the
INF
algorithm
high
values(bright
pixels)
are equivalentto
large
infeasibility
values
145
4.34
Infeasibility
resultsfrom
ENVI's MTMF
algorithm as appliedto the
FR I
exposed
data
set compensated withELM.
Here,
we usedthe
first 8 MNF
bands.
The
rawtest
statisticimage
(a)
canbe
seen nextto
a version(b)
with athreshold
applied, showing
the
first
1500
scores.For
the
INF
algorithm
high
values(bright
pixels)
are equivalentto
large
infeasibility
values
146
4.35
Infeasibility
resultsfrom ENVI's MTMF
algorithm as appliedto the
FR
I
exposeddata
set compensated withATREM.
Here,
we usedthe
first
8
MNF bands. The
rawtest
statisticimage
(a)
canbe
seennextto
a version(b)
with athreshold applied,
showing
the
first
1500
scores.For
the
INF
algorithmhigh
values(bright
pixels)
are equivalentto
large
infeasibility
values
147
4.36
Infeasibility
resultsfrom ENVI's MTMF
algorithm as appliedto the
FR
I
exposeddata
set compensated withFLAASH.
Here,
we usedthe
first
8
MNF bands. The
rawtest
statisticimage
(a)
canbe
seen nextto
a version(b)
with athreshold applied,
showing
the
first
1500
scores.For
the
INF
algorithm
high
values(bright
pixels)
are equivalentto
large
infeasibility
4.37
Infeasibility
resultsfrom applying
the
SIP
algorithmto the
FR I
exposedradiance
data
set.The
rawtest
statisticimage
(a)
canbe
seen nextto
a version with athreshold
applied(b).
For
the
SIP
algorithmhigh
values(bright
pixels)
are equivalentto
large
infeasibility
values149
4.38
Infeasibility
resultsfrom ENVI's MTMF
algorithmas appliedto the
FR
I
concealed
data
set compensated withELM.
Here,
wehave
keep
allMNF
bands.
The
rawtest
statisticimage
(a)
canbe
seen nextto
a version(b)
with athreshold applied,
showing
the
first
1500
scores.For
the
INF
algorithm
high
values(bright
pixels)
are equivalentto
large
infeasibility
values
150
4.39
Infeasibility
resultsfrom ENVI's MTMF
algorithm as appliedto the
FR
I
concealeddata
set compensated withELM.
Here,
we usedthe
first
8
MNF bands. The
rawtest
statisticimage
(a)
canbe
seennextto
aversion(b)
with athreshold applied,
showing
the
first
1500
scores.For
the
INF
algorithm
high
values(bright
pixels)
are equivalentto
large
infeasibility
values
151
4.40
Infeasibility
resultsfrom applying
the
SIP
algorithmto the
FR I
concealeddata
set.The
rawtest
statisticimage
(a)
canbe
seen nextto
a versionwith a
threshold
applied(b).
For
the
SIP
algorithmhigh
values(bright
pixels)
areequivalentto
large
infeasibility
values152
4.41
Two dimensional decision
spaces createdusing the
PB-SIFT algorithm,
asapplied
to the
FR I
exposeddata
set.(a)
Shows
the
result ofusing
PB-SIFT,
using the
entiretarget space,
(b)
showsthe
result ofusing
PB-SIFT,
using
7 basis
vectors,
and(c)
showsthe
result ofusing
PB-SIFT,
using
the
4.42 Two dimensional
decision
spaces createdusing
the
MTMF
algorithm,
asapplied
to the
FR
I
exposeddata
set.(a)
Shows
the
resultusing ELM
data
withall(170)
MNF
kept
while(b)
only keeps
the
first
eight.Decision
spaces are also shown
using
(c)
ATREM
and(d)
FLAASH
compensatedimagery
159
4.43
Two dimensional
decision
spaces createdusing
the
PB-SIFT
algorithm,
as applied
to the
FR I
concealeddata
set.(a)
Shows
the
result ofusing
PB-SIFT,
using
the
entiretarget space,
(b)
showsthe
result ofusing
PB-SIFT,
using 7 basis
vectors,
and(c)
showsthe
result ofusing
PB-SIFT,
using
the
meantarget
space vector161
4.44 Two
dimensional decision
spaces createdusing
the
MTMF
algorithm,
asapplied
to the
FR I
concealeddata
set.(a)
Shows
the
resultusing ELM
data
with all(170)
MNF kept
while(b)
only
keeps
the
first
eight162
4.45 ROC
curveimprovement
using
variousSIP
thresholds,
as appliedto the
FR
I
exposedimagery.
The
SAM
andSMF
algorithms were appliedto
ELM
compensated
imagery,
(a)
Shows
ROC
curvesusing
atruth
maskthat
allowsfor FA's
on other man-made panels while(b)
shows anincreased
ROC
performancefor
the
PBosp.bv
case165
4.46
ROC
curveimprovement using
variousSIP
thresholds,
as appliedto the
FR I
concealedimagery.
The
SAM
andSMF
algorithms were appliedto
ELM
compensatedimagery,
(a)
Shows
ROC
curvesusing
atruth
maskthat
allowsfor FA's
on other man-made panelswhile(b)
shows anincreased
4.47 Results from
testing
the
expectedbehavior
ofthe
Structured
Infeasibility
Projector (SIP).
We
can seethat
asthe target
abundancein
abackground
pixel
increases,
the
overall variance and mean projecteddistance decreases.
169
4.48 Two
dimensional
decision
space createdusing the
PB-SIFT
algorithm,
as appliedto the
FR I
concealeddata
set.This
example3.1
Summary
ofthe
FR I
collectionparametersfor both
the
fully
exposed andfully
concealedflight
lines
85
4.1
Summary
of exposed andfully
concealed sceneparameters,
along
withknown
values,
requiredfor
aMODTRAN
run93
4.2
Summary
of varied parametersfor both
the
fully
exposed and concealedimages
Ill
4.3
Summary
oftest
statisticimages for both
exposed and concealeddata
sets121
4.4
Summary
ofSIP
thresholds
as appliedto
a2D
decision
space generated
from
the
FRI
exposedimagery.
Table
contains number of pixelswith equivalent -rates
in
parenthesis164
4.5
Summary
ofSIP
thresholds
as appliedto
a2D
decision
space generated
from
the
FRI
concealedimagery.
Table
contains number ofpixels with equivalent -rates
in
parenthesis166
[image:30.491.67.435.236.497.2]to the
gates ofthe temple
ofscience arewritten the words:'Ye
musthave
faith."Max
Planck
Introduction
1.1
Remote
Sensing
and
Spectroscopy
Remote
sensing,
for
all practicalpurposes,
is
the
field
ofstudy
associated withextracting information
about an object withoutcoming
into
physical contact withit.
A definition
such asthis
caninclude
a multitude ofdisciplines
such as medicalimaging,
astronomy, vision, sonar,
and earth observationfrom
above via an aircraft or space satellite.For
the
mostpart,
remotesensing is
oftenthought
ofin
the
latter
context, viewing
andanalyzing
earthfrom
above.The field
of remotesensing
is
has been evolving for
over50
years.This
goesback
to the
late 40s
andearly
50s
whensomeofthe
first
satellitephotographs werebeing
recoveredfrom V-2 launches.
During
this
time the
satelliteimaging
ofthe
earthdeveloped hand
in
hand
withthe international
space program.Following
the
first
manmade satellite
launch
ofSputnik 1
onOctober
4,
1957,
photographs and videoimages
were acquiredby
U.S. Explorer
andMercury
programs andthe
Soviet Unions
LUNA
series.Just 3
years afterSputnik l's debut
(April
1960),
the
U.S. initiated its
spaced-based reconnaissanceprogram
acquiring
high-resolution
photographicimages
from
space[38].
Today
remotesensing is
usedin
avariety
ofapplications such as environmentalmapping,
globalchangeresearch,
geologicalresearch,
wetlandsmapping,
assessmentof
traceability,
plant and mineralidentification
and abundanceestimation, target
detection
andclassification,
andcrop
analysis.What
makesthe study
ofthese
application areas possible
is
the
fact
that
materialsthat
makeup
objectsin
a scene(i.e.,
vehicles,
wheatfields,
body
ofwater,
etc.)
canbe
characterizeddue
to the
fact
that
they
reflect, emit, scatter,
and absorb electromagnetic(EM)
radiationdifferently.
One
cantake
advantage ofthis
fact
andsay
that, ideally,
each materialtherefore
has
a unique characteristicfeature. If
wearelooking
atthis
interaction in
many
regions ofthe
EM
spectrumthen
we go onto
further
say that
each materialhas
a unique spectral signature.The
analysis andinterpretation
of such spectralsignatures
is
called spectroscopy.This
material signatureis
usually
propagatedthrough the
atmosphere whereit
falls incident
on animaging
systems sensor.Today,
mostimaging
system sensorsare of a solid state
design.
This
enables oneto
design
a system(in
conjunctionwith a
dispersing
element)
that
cansimultaneously
capture spatial as well as spectroscopic
information
about a piece of real estatebelow. These
systems are calledimaging
spectrometers and canbe
essentially
divided into
those that
use oneto ten
E fiP i'.
.
,- | i . Pi ..
1 fayI
',,=.
-Figure
1.1:
Overview
of collection capabilities of ahyperspectral
sensorsystem.Shown
are materials with
distinctive
spectroscopic characteristics obtainedthrough the many
band
or channelsthe
instrument
collects[49].
channels
(hyperspectral). An
example of such a systemis
shownin
Figure
1.1.
The
field
ofimaging
spectrometery
has been
underdevelopment
sincethe
1970s
as a means of
identifying
andmapping
earth resources.As
aresult,
hyperspectral
data,
in
particular,
permitthe
expansion ofdetection
and classification activitiesto targets previously
unresolvedin
multispectralimages.
Examples
of suchhyper
[image:33.491.125.385.94.310.2]1.2
Hyperspectral
Application Areas
Of
the
many
applications
areasin
remotesensing,
hyperspectral
remotesensing
tends to
focus
ontopics
in
three
majorcategories,
(i)
anomaly
detection,
(ii)
tar
get recognition and
detection,
and(iii)
background
characterization.Anomaly
de
tection
seeksto
find
signatures of unusualmaterials,
as comparedto
background
materials,
without a prioriknowledge
ofthe target.
In
contrast, target
detection
algorithmsuse
known information
about a material ofinterest
and seekto
find
sucha
material(s) in
the
scene.The
a prioriinformation
may
originatefrom
a spectrallibrary
orbe image derived. In
target recognition,
we notonly detect
the target
(s)
but
we assignit
alabel
or name.This
method ofdetection is
called classification.
Classification
is
usually
a name given when oneis
dealing
withgrouping
alarge
number of pixelsinto
multiple classes.For
target
detection,
the
number ofobjects one seeks
to
find is
usually very
sparse and man-madein
nature.The last
category,
background
characterization,
deals
withthe
characterization ofthe
overallscene
background.
Examples
ofthis
include,
terrain categorization,
waterquality
assessment,
atmosphericcompensation,
and plumedetection
and quantification.In
this research,
wefocus
onthe
development
oftarget
detection
algorithmsthat
usehyperspectral
data
captured withimaging
spectrometers.1.3
Hyperspectral
Target Detection:
Considerations
There
aremany
issues
that
cancomplicatethe
success oroutcomeofthe
above mentioned
algorithms.One
suchissue is
atmospheric compensation.In
mostcases,
oneatmospherically
compensatesimagery
to
groundleaving
reflectancebefore applying
interest is usually
measuredin
reflectance units.In
this
casethe
success ofthe
de
tection
algorithmis
highly
dependent
onthe validity
ofthe
compensation algorithm.The
method andtype
of compensationis
a significant part ofhyperspectral
remotesensing
andis
the
subject ofongoing
research.In
this
research we willbe
taking
the
approach ofdeveloping
andapplying
algorithms on uncompensatedimagery.
Rather
than
"back
out"the
atmosphereto
gain accessto the
ground reflectancetarget
spectrum wesimply
propagatethe target through the
atmosphereusing
aphysics
based
model and generate a probabilistictarget
spacethat
resembles whatthe target
mightlook like
as seenby
the
imaging
sensor.That
is,
atarget
sensorreaching
radiance spaceis
developed
that
canbe
usedin
adetection
scheme.Another issue
that
needsto
be
consideredis
variability
in
the
data.
In
general,
materials
in hyperspectral data
do
not exhibitdeterministic behavior.
Rather,
a single material will exhibit afair
amountof randomvariability that
needsto
be
ac countedfor in
the
detection
model.The
variability
can arisefrom
poor atmosphericcompensation,
spectrometerinstrument
error,
sensornoise,
selfshadowing,
adjacency
effects and geographiclocation.
Additionally,
variability
can arisefrom
nat ural variationin
the target
orvariability
due
to
lack
of specificknowledge
aboutthe
target.
The
most populartechniques to
characterizethis variability
involve
either vector algebra
(geometry)
or statisticaldescriptors.
In
the
geometric sense we useendmembers,
whereas means and covariances are used as statisticaldescrip
tors.
Examples include
probability
density
(statistical)
and(linear)
mixing
models(geometric).
Lastly,
there
is
the
issue
offull
versus mixed pixels.Depending
onthe
sensorground resolved
distance
(GRD),
pixels will eitherbe 100%
filled
orpartially
filled
appropriatemodel.
1.4
Research Overview:
Work
Statement
Most detection
models arebased
onthe traditional
matchedfilter
anddescribe
the
background
variability
through
use of geometric or stochastic means.This
researchexplores
the
development
of ageometricalgorithmthat
factors in
aphysically
based
target
modelto
accountfor
target variability
whileusing
an additional metricthat
aids
in rejecting
false
alarms.This
geometric approachis
very
similarto
the
stochastic
Mixture Tuned Matched Filter
(MTMF)
which uses a spectral matchedfilter
and aninfeasibility
metricto
reducefalse
alarms.An
overview ofthe
researchinto
physics
based modeling
and algorithmdevelopment is
providedbelow.
Full
literature
search and overview of relevant concepts and methods asthey
relateto
physicsbased modeling
andtarget
detection.
Improved
physicsbased
modeling
of atarget
space.This includes investigation
on what parameters
to
use whengenerating
atarget space,
how
they
areused,
and what values are appropriate whenusing them.
Incorporate
improvements to
current usage of physicsbased
modeling.This
includes
any
modificationsto the sensor-reaching
radiance equation.Develop
a new(hybrid)
detector
that
can utilize resultsfrom
physicsbased
modeling.
Develop
ageometric equivalentto the
infeasibility
concept.Develop
a newgeometricdetector
that
is based
onthe
MTMF.
Explore
the
behavior
of2D detector
spaces.Compare
results of new physicsbased detectors
to the
Spectral
Angle
Map
"The fewer
the
facts,
thestrongerthe
opinion."Arnold
H.
Glasow
Background
In
this
background
section wedescribe
many
ofthe
approaches usedin
traditional
target
detection.
We
start off with an explanation of signaldetection
theory
andhow it
relatesto target
detection
through
development
ofthe
hypothesis
test.
This
leads
usto the
derivation
ofthe
likelihood
and generalizedlikelihood
ratiotests.
We
then
explore methodsto
characterizebackground
spacesin
a stochastic sensefollowed
by
appropriate statistical models.This is
a segueinto
geometrical(end-members)
methodsto
characterizethe
background
followed
by
adescription
ofthe
linear
mixing
model.Subsequent
sectionsdescribe
approachesto target
detection
(both
in
a geometric and statisticalsense) for
fully
resolved and mixed pixels.We
then introduce the
concept oftarget
spaces and physicsbased modeling
al-gorithm.
Finally,
weintroduce hybrid
algorithmsthat take
advantage of statistical andgeometric
descriptors.
2.1
Signal Detection
Theory
Detection
theory
is
a generalizedterm
usedto
categorizedecision making
about whether or not a particular event occurs.For
example,
in
radar one mightbe
interested in
determining
the
presence or absence of anapproaching aircraft,
whichmay
be
obscuredby
background
noise.Here
we choosebetween
two
possible casesin seeking
outthe
aircraft:(i)
the
aircraft and noise are present or(ii)
noiseonly
is
present.This decision making
process canbe
thought
of as abinary
hypothesis
testing
problem.If
the
nature ofthe
data is
random,
with noise as anexample, then
a statistical approachis
necessary.Here,
the
binary
hypothesis
testing
problemturns
into
a statisticalhypothesis
testing
problem.The
typical target
detection
chainthat
creates suchbinary
detection
maps canbe
seenin Figure 2.1.
In
general, the
simplestdetection
problemis
onethat
involves
aknown determin
istic
signal andcontainsbackground
noisethat
is
Gaussian
with aknown probability
density
function (PDF). The
problembecomes
moredifficult
asthe
deterministic
signalbecomes
random with an unknowndistribution
andthe
Gaussian
assumptionsbecome
nonGaussian
with unknownPDF's. These latter
conditionsalldecrease de
tection
performancedue
to the
fact
that
less is known
aboutthe
characteristics ofTarget
*
Detection
Algorithm
Detection
Map
Target Spectra
Figure 2.1:
Typical
target
detection
processshowing
adetection
map
for
the
3 input
target
spectra.2.1.1
Hypothesis
Testing
and
the
Likelihood Ratio
(LR)
Lets
say
we are given an observed pixel spectrum x suchthat
xT
=
[.r(A1),x(A2),---,x(Ap)]
(2.1)
for
p-spectralbands
and we wishto
decide if
the
pixelhas
aninteresting
"target"in it.
Given
this situation,
we establishthe
following
binary
hypothesis
test
for
the
pixel:34o:
target
absent"Ky.
target
presentwhere
Jio
is
referredto
asthe
nullhypothesis
and"Hi
asthe
alternativehypothesis.
For
illustrative purposes,
we present a univariate example ofthis
binary
hypothesis
test.
If
we assume xis
a realization of a multivariateGaussian
randomvariable,
then
we will assumethe
from
a singleband
comesfrom
eitherN(ji0,a2)
p(x;
%)
p(x;X,)
[image:41.491.68.435.68.273.2]Type II
error(orM)
Type I
error(orFA)
Figure 2.2:
Probability density
functions
for
hypothesis
testing
problemshowing
errorsand
probability
ofdetection
Pq
.In
the
eventthat
wedecide
Jfi
(target
present) but
-K0
is
true
(target
is
actually
absent),
we make whatis
called aType I
error.This is
typically
termed
afalse
alarm(FA)
by
engineers.On
the
otherhand,
if
wedecide
!K0
but
!Ki
is
true,
we make aType II
error.The engineering
community
refersto this type
of error as a miss(M)
(cf.
Figure 2.2). In
general,
it
is
wellknown
that
detectors based
onthe
likelihood
ratio
(LR)
test
have
certain advantages over analysis ofthe probability
functions
individually
[33].
The LR
minimizesthe
risk associated withincorrect decisions
aswellas
leads
to
detectors
that
are optimumfor
a wide range ofperformancecriteria.This
ratiois
usually
defined
asC(x)
p(x;
"Ki
(2.2)
p(x;
_H0)'
If
(x)
exceeds athreshold
7, then the
alternativehypothesis
(target
present) is
detector
ordetection
statistic,
the
former
of whichis
alabel
usedby
the engineering
community
[23].
If
the
probability
density
functions
in
Eq.
(2.2)
arecompletely
known,
then
the test
is
called a simplehypothesis
test.
In
the
eventthat the
PDF's
are notcompletely
known,
then
wehave
whatis
called a compositehypothesis
test.
2.1.2
The Neyman-Pearson Approach
It is
always of greatdesire
to
selectthe threshold 7,
suchthat
one maximizesthe
number of correct
detections
whileminimizing the
numberoftarget
misses andfalse
alarms.In
the
eventthat
wehave
a simplehypothesis
test
wecan choose athreshold
based
on eitherthe
Neyman-Pearson
theorem
orthe
Bayesian
approach,
whichis
based
on minimization ofthe
Bayes
riskmost often seenin
classification problems.In
the
later,
we chooseathreshold that
leads
to
minimizeboth false
alarms(FA)
andmisses
(M).
However,
in
detection
applications,
wherethe probability
of occurrence of atarget
is
very small,
minimization ofthe
errorprobability
(FA
andM)
is
not a good criterion ofperformance,
because
the probability
of error canbe
minimizedby
classifying
every
pixel asbackground
[33]
.A better
approachis
to
maximizethe
probability
ofchoosing
"K\
whenindeed
it is
true
(detection),
while notexceeding
a"fixed"
probability
ofchoosing
"K\
whenit
is
false
(false
alarm).This
approachis
calledthe Neyman-Pearson theorem
[23]
whichsimply
maximizesthe
probability
of
detection
(Pd)
given afixed
value afor
the probability
offalse
alarms(Pfa)-Therefore,
wedecide
"K\,
for
a givenPFA
a,
if
t(x)
=When working
with remotesensing
data
typical
per-pixel valuesfor
a rangefrom
IO"4
to
IO"6.
2.1.3
Generalized Likelihood
Ratio
In practice, information
aboutthe
PDF's
underthe two
hypotheses
(3f0
and%{)
may
notbe known.
In
this
case we cannot usethe
Neyman-Pearson
methodde
scribed above.
Instead,
we replacethe
unknown parametersin
Eq.
(2.3)
withtheir
maximum
likelihood
estimates(MLE).
This
approachis
calledthe
generalizedlike
lihood
ratio(GLR)
test
and produces afamily
of,
what aretypically
called,
adaptivedetectors.
These detectors
aretermed
adaptivebecause
the
unknown parametersmust
be
estimatedfrom
the
actualimage data.
2.2
Estimation
of
Target
and
Background
Spaces
In
the
previous section weintroduced
the
concept of alikelihood
ratiobased
onthe
Neaman-Pearson
criteria.If
the
distributions in
the two
hypotheses
containunknown
parameters, then the
detector
wastermed
"adaptive" and called a generalized
likelihood
ratiotest.
In
this case, the
unknown parameters mustbe
estimatedfrom
the
background
ortarget
space.There
aremany techniques
in estimating
these
parameters all of which
depend
onthe
type
ofdetection
model used.If
the
modelrequires means and covariance's
then
a statistical approachis
necessary.However,
if
we use a subspace ormixing model, then the
matricesin
the
model areusually
2.2.1
Stochastic Methods
More
oftenthan not,
wearetrying
to
characterizebackground
(or
target)
variability
due
to
effects such asatmospheric
conditions, noise,
orvariability
in
the
materialitself. In
the
eventthat the
background
ortarget
does
notvary
(i.e.,
is
determinis
tic)
then there
wouldbe
no needfor
characterization oftargets
orbackground
viastochastic methods.
This is usually
notthe
case.There
aremany different
waysto
characterizethese target
andbackground
spaces,
some of which arediscussed below.
Local
(Windowing)
andGlobal Approaches
A
straightforward
approachto
c
![Figure 1.1:band Overview of collection capabilities of a hyperspectral sensor system. Shownare materials with distinctive spectroscopic characteristics obtained through the many or channels the instrument collects [49].](https://thumb-us.123doks.com/thumbv2/123dok_us/122307.11851/33.491.125.385.94.310/collection-capabilities-hyperspectral-materials-distinctive-spectroscopic-characteristics-instrument.webp)
![Figure 3.1: Atmospheric carbon dioxide mixing ratios determined from the continuousmonitoring programs at the 4 NOAA CMDL baseline observatories [18].](https://thumb-us.123doks.com/thumbv2/123dok_us/122307.11851/94.491.114.386.93.305/figure-atmospheric-dioxide-determined-continuousmonitoring-programs-baseline-observatories.webp)


