International Journal of Innovative Technology and Exploring Engineering (IJITEE) ISSN: 2278-3075, Volume-8 Issue-11, September 2019
Abstract: This paper present’s the study of Load Frequency Control (LFC) with certain nonlinear parameters at different communication delay latencies. The main aim is to maintain the stability of power system in all the adverse conditions including time delays in the network. Here, the stability of the system is demonstrated using Lyapuonav stability theorem in the presence of Delay’s and Linear Matrix Inequalities (LMI). Time delays are taken in the network. These delay latencies are linearized using the rational approximation method. Here Padé approximation is used with different time delay values. The problem is formulated using a decentralized LFC approach for a power system containing a single area. Simulation results carried out with different delay latency values integrated with the Load frequency control LMI and rigorous analysis is performed to test the robustness of the proposed strategy.
Keywords : Load Frequency Control, Linear Matrix Inequality, Pade Approximation, Communication delays, Lyapunov stability, Robust control.
I. INTRODUCTION
In our power system network , the deviation or unbalance between the real power input and real power output takes place due to change in load this results in frequency deviation which is undesirable consequence. LFC is the basic mechanism used to mitigate this unbalance and maintain the frequency in permissible limits. Rotating parts in the unit supplies the kinetic energy in order to reduce the difference. The kinetic energy of any unit is given by
KE = --(1)
Where I – Moment of inertia of the rotating part and - the angular speed of the rotating part.
If KE of the rotating part decreases , then the speed falls leading to dip in frequency .The frequency variation Δf is detected by speed-governor . This change in frequency is given as feedback to the control inlet valve of the prime mover. It acts as the feedback mechanism and modifies the input and acts to make the error zero. This indicates that
Revised Manuscript Received on September 07, 2019
Mounica Nutakki*, Student EEE , Gokaraju Rangaraju Institute of Engineering and Technology(JNTU-H),Hyderabad, INDIA.
Sri Vidya Devi Palakaluri, Assistant Professor EEE, Gokaraju Rangaraju Institute of Engineering and Technology(JNTU-H),Hyderabad, INDIA
Dr.R.Vijaya Santhi, Assistant Professor EEE, Andhra University, Vizag, INDIA.
frequency change is dependent on the balance of real power. By sensing the power flow change through the tie-line, LFC has the capability to control the real-power transfer through the transmission lines. An Isolated power system with a turbine, speed governor, generator and load is represented as a single area control. In this single area control all the generators swing together in unison, providing greater stability to the system in both static and dynamic situations.[6]. Several research works have been carried out in the past to maintain the stability and robustness of the system. One of the popular known method is by the PID controller. There are many methods proposed with LFC to maintain the stability , they are listed as Fuzzy logic, Linear matrix inequality(LMI), Adaptive control, Neural network , Active disturbance rejection control etc. Communication channels are used for transmission of measured data to control centres from the remote terminal units (RTU). Due to the presence of open channels of communication lines, we experience time delays in our systems which are constant delays as well as time varying delays. The performance of control system is highly effected by these delays, which causes insecurity in systems like “deviation far from zero” In the control system when we are performing robustness analysis, an feedback synthesis using lyapuonav functions we are facing the problems such as Interpolation, Digital filter realisation, optimal matrix scaling etc. These problems can be reduced by using LMI to a handful of standard convex and quasi convex problems. LMI-based approach is developed that gives the suboptimal solution for the LFC problem [8]. A linear matrix inequality (LMI) is in the form of
F(x) --(2)
Where
x∈ are the variable the symmetric matrices where i =0,1,...,m
Positive definite matrix:
F(x) > 0 means F(x) is a positive definite, i.e., F(x)u > 0 for all nonzero u∈ .
Multiple LMIs >0, >0………., >0 are
expressed as a single LMI
Effect of different Communication Delay
Latencies on LMI based Load Frequency Control
Model
diag( >0, >0,………., >0 ) >0
Affine function:
f ( , ,….., )= + +………... +b
LMI based problems are easy to control from a number of theoretical and practical view points ,for example the general form of robust analysis for a system with real parameters perturbations. LMI problems can also be solved analytically and efficiently by using interior point methods. The LMI approach can provide solutions numerically for those problems that numerical solutions are not possible.
Stability affirmation is the primary target in the structure of the previously mentioned LFC approaches which makes the engineers to think about the robust and optimal nature of the system. couple of most imperative and mandatory execution of control for a power system are Optimal operation of the system and robustness against change of Parameters and modelled elements. We experience with the information loss due to the effect of communication faults , this can be avoided by assuming the identical time varying system.
Another LMI based model which is helpful in achieving the objectives like robustness and optimal performance is a semi-positive program (SDP), it is useful in time varying dynamics and in uncertainty conditions. In this method, the SDP will realise the state feedback control inputs from online, these feedback inputs are used in lyapuonav stability functions which ensures the stability of the system including robustness and optimal performance.
Maintenance of frequency deviation in desired values is the main framework of the LFC. SDP optimisation which is introduced will reduce the frequency deviation and regularise it with the base control effort. The system has improved performance for large time delays and time varying elements. [3-5]
Further discussion of this paper is divide into multiple sections. In section II, dynamic area of LFC are presented, section III., deals with the algorithm of LMI, Section IV consider several case studies and analysis of the proposed LFC approach.
II. DYNAMIC MODEL OF LFC A. One-area LFC control
A Set of nonlinear equations are used to represent the problems in a dynamic model of the power system using LFC. The following state equations represent the dynamic model of a single-area control LFC system
--(3)
--(4) Where ) =
=
chi
T M M
D
1 0
0 1
=
F = , = --(5)
--(6) Also, ACE is defined as
, --(7)
The above equation represents the ACE delay which is the frequency deviation measure. It should be zero at the steady state.
The linearized model of the governor valve position Due to ACE delayis given by
--(8)
Where denotes the delay of the system.
The system (3) can be equated as
--(9)
where ) =
= =
F= , =
B. Pade Approximation
The approximation of time delays using rational models is given pade and it is known as Pade Approximation. Transportation delays and communication delays occur in continuous systems can be approximated using this approximation technique. The Laplace transform of a time delay of T seconds is exp(–sT). using Padé approximation formulas, this exponential transfer function is approximated by a rational transfer function. Dead time using a rational function is determined using Padé approximation. Generally, Padé approximation is of 5 orders with an equivalent numerator- and denominator degree.
Due to equivalent denominators of both numerator and denominator step response of the transfer function exhibit a jump at t=0. i.e., output signal at t=0 appears without delaying the input signal. This is not desirable. This approximation has good properties in the frequency domain. The polynomials Pm(x) and of the Padé
International Journal of Innovative Technology and Exploring Engineering (IJITEE) ISSN: 2278-3075, Volume-8 Issue-11, September 2019
P(x) = --(10)
Qn(x) = --(11)
Note, the sign will be changed for the numerator
coefficients and for all m=n. The zeros
and poles of are symmetrical to the imaginary axes.
In order to define the transfer functions of the approximations to different numerator degree, one simply substitution to be done
i.e., x=sT into (10) and (11).
Analytic form representation used for representing the approximation of polynomials. The Padé approximation
is done such that the numerator's degree is one not as much as that of the denominator which gives a superior approximation of the step-response.
If it is applied in closed-loop, different frequency characteristics are obtained. The use of or
depends on the frequency range. By introducing modelling errors which limits the bandwidth for approximating the dead-time.
III. ALGORITHM
The state space inputs of a single area system are declared and LMI variables are declared by using LMI functions. From the Ricatti equation the state variables and LMI variables are represented in the matrix format. From this equation the inputs are changed which are represented with LMI variables. This complete algorithm is initialized with a class and object and id inserted into a single area system. [3]
Steps for implementing algorithm
Step:1 - Defining the class Classdef text< > Step:2 - Object declaration
Step:3 - Enter the elements of matrices A,B,C,D. Step:4 - Declaration of LMI variables p,q,r Step:5 - Declaration of LMI terms
Step:6 - Solving the Recatti equation
Step:7 - Represent modified p,q,r values Step:8 -Insert algorithm into one area system
IV. RESULTS AND DISCUSSION
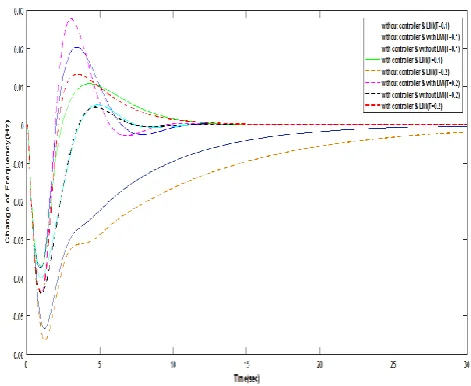
The execution of the proposed methodology is researched for one –area system. The performance of the present LFC approach is remarkable that all system suffers from the delays, different instances of time varying systems in one-area LFC are considered. The responses of the LFC system with an LMI-based robust predictive controller [1] and the LFC system with controller based on LMI are shown in below Figures. It shows good time responses at lower fluctuations. Assuming the delay of the system is to be Td=
0.1 and 0.2 respectively.
[image:3.595.319.555.67.260.2][image:3.595.44.287.478.623.2]
Fig.1. Change in Frequency with first order time delay for one area LFC-system
Fig. 2. Change in Frequency with second order time delay for one area LFC-system
Fig .3. Change in Frequency with third order time delay for one area LFC-system
[image:3.595.324.538.496.671.2]Fig.4. Change in Frequency with fourth order time delay for one area LFC-system
Fig.5. Change in Frequency with fifth order time delay for one area LFC-system
In the above studies, to assess the performance of the proposed one area LFC system with a controller based LMI along with communication delays are considered. The below analysis shows the better performance of the proposed strategy by comparing with the previous approaches of LFC. The key features of the proposed strategy are considering the time varying parameters in LFC system with communication delays. The below tables give the numerical analysis w.r.t UN: Undershoot, ST: Settling time OS: Overshoot for different order of time delays with and without controllers and LMI.
Tabel:1 Numerical analysis without a controller & LMI
Table: 2 Numerical analysis without controller & with LMI
ORDER
UN OS ST UN OS ST
1 -0.038 0.02 11 -0.043 0.028 11
2 -0.038 0.02 11 -0.04 0.018 11
3 -0.037 0.02 11 -0.045 0.021 11
4 -0.037 0.02 11 -0.042 0.023 11
5 -0.037 0.02 11 -0.04 0.02 11
Table: 3 Numerical analysis with a controller & without LMI
ORDER UN OS ST UN OS ST
1 -0.04 0.01 10 -0.044 0.005 10
2 -0.037 0.01 10 -0.04 0.009 10
3 -0.037 0.005 10 -0.04 0.01 10
4 -0.037 0.007 10 -0.04 0.012 10
5 -0.037 0.01 10 -0.04 0.011 10
Table: 4 Numerical analysis with controller & LMI
ORDER UN OS ST UN OS ST
1 -0.037 0.009 10 -0.043 0.012 10
2 -0.034 0.01 10 -0.037 0.009 10
3 -0.034 0.01 10 -0.038 0.009 10
4 -0.033 0.009 10 -0.038 0.01 10
5 -0.033 0.008 10 -0.038 0.008 10
V. CONCLUSION
For designing any LFC system stability, optimality and robustness are to be maintained. By executing the LFC system with controller dependent on LMI for the power system with delay in communication, the stability of the system is better compared to the previous approaches guaranteed by the lyapunov theorem. By using SDP (semi definite programming) with LMI constraints a state feedback input is obtained. With respect to uncertainties, time delays this control scheme will give better performance . The improved and superiority in the LMI method of approach is represented by the simulation results.
APPENDIX
= 0.17s, = 0.4s , R = 0.05 , D = 1.5 , M = 12 , ORDER
UN ST UN ST
1 -0.052 30 -0.056 ˃30
2 -0.052 30 -0.057 ˃30
3 -0.05 ˃30 -0.057 ˃30
4 -0.051 ˃30 -0.057 ˃30
International Journal of Innovative Technology and Exploring Engineering (IJITEE) ISSN: 2278-3075, Volume-8 Issue-11, September 2019
REFERENCES
1. Pegah Ojaghi and Mehdi Rahmani,”LMI-based robust predicative load frequency control for power systems with communication delays, “power systems, IEEE Transactions,2017.
2. Hadi saadat,”Power System Analysis,”
3. Stephen Boyd,Laurent El Ghaoui, Eric Feron and venkataramanan ramakrishnan,”Linear matrix inequality in system and control box,” 4. Didier Henrion,”LMIs in system control state-spsce methods stsbiliy
analysis,”2006.
5. Y. J. Erkus and Y.J . Lee,”Linear matrix inequalities and MATLAB LMI toolbox,”2004.
6. Prabha Kundur,”Power system stsbility and control,”2013.
7. N. Chauang, “Robust H infinity load frequency control in interconnected
power systems,” IET control theory & Applications,vol. 10,no. 1,pp.67-75,2016.
8. S. Sonmez and S. Ayasun and C. Nwankpa,”An exact method for computing delay margin for stability of LFC with constant communication delays,”power systems,IEEE Transactions on,vol. 31,no. 1,pp.370-377,2016.
9. L.El. Ghaoui and . I. Niculescu, Advances in linear matrix inequality methods in control.siam,2000,vol.2.
10. L. Dong,Y. Zhang and Z. Gao,”A robust decentalised load frequency controller for interconnected power systems,”ISA Transactions,vol. 51,no. 3,pp.410-419,2012.
11. X. Liu,H. Nong, K. Xi and X. Yao,”robust distributed load frequency control of interconnected power systems,”mathematical problems in engineering,vol. 2013,2013.
AUTHORS PROFILE
Mounica Nutakki, Student, M.Tech in power systems (EEE) from GRIET Hyderabad, B.Tech in EEE from ALIET affiliated to JNTU Kakinada, Publications: “Simulation of Power Electronic Transformer for Improving Power Quality-2017”,”Solar Powered DTMF Controlled Over Skype and its Applications in Various Fields-2019”.
Sri Vidya Devi Palakaluri, Assistant Professor EEE department in GRIET from 2012 to till date. She has done her M.Tech in electrical power engineering from JNTU University and her B.tech in Electrical and Electrical Engineering in 2005 from KITS affiliated to JNTUH. Publications: “Introducing LQR-Fuzzy Technique with Dynamic Demand Response Control Loop to Load Frequency Control Model ”2016, ”Solar Powered DTMF Controlled Over Skype and its Applications in Various Fields-2019”, Sensors and its Applications in Academia for effective learning by doing (LBD)-2018”, “The effect of communication delay latency for an intelligent Multi area LFC-DR model-2018”, “ Impact of Internet of Things using LFC-DR for frequency control-2017”, “Internet of things Embedded with Raspberry pi and Arduino-2015”, "Ultrasonic RADAR system using Arduino-2014", “Measurement of Power and Energy Using Arduino-2013”, “ Novel Implementation Of Pspice Modeling For Reliability Analysis Of Distribution Systems-2010”.
Dr.R.Vijaya Santhi , Assistant Professor EEE department in Andhra University from 2008 to till date. She has Received Ph.D. for work on DESIGN OF ROBUST DECENTRALIZED LOAD FREQUENCY CONTROLLER FOR INTERCONNECTED POWER SYSTEMS USING TYPE – 2 FUZZY APPROACH under Prof K Rama Sudha( Andhra University )Awarded on 7-01-2014. She has done her M.tech in JNTU University and her B.tech in Nagarjuna University. Publications: "Modeling and implementation of logic circuits for various protective relays in power systems-2016", "Design Of Observer Based Quasi Decentralized Fuzzy Load Frequency Controller for Inter Connected Power System-2015", "Adaptive Type-2 Fuzzy Controller for Load Frequency Control of an Interconnected Hydro-Thermal system Including SMES units-2014", "Load Frequency Control of an Interconnected Reheat Thermal system using Type-2 fuzzy system including SMES units-2012", "Robust decentralized load frequency control of interconnected power system with