Contents lists available atScienceDirect
Theoretical
Computer
Science
www.elsevier.com/locate/tcs
Design
and
analysis
of
different
alternating
variable
searches
for
search-based
software
testing
✩
,
✩✩
Joseph Kempka,
Phil McMinn
1,
Dirk Sudholt
∗
,
2DepartmentofComputerScience,UniversityofSheffield,Sheffield,S1 4DP,UK
a
r
t
i
c
l
e
i
n
f
o
a
b
s
t
r
a
c
t
Articlehistory:
Received26November2013
Receivedinrevisedform17November2014 Accepted11December2014
Availableonline8January2015
Keywords:
Search-basedsoftwareengineering Testdatageneration
Localsearch Runtimeanalysis Theory
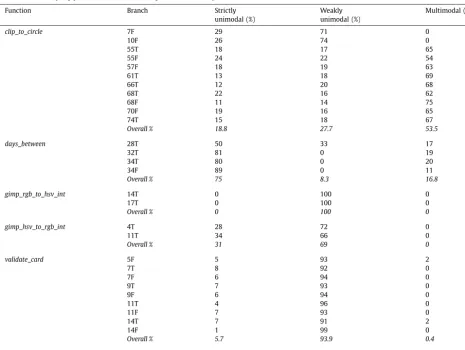
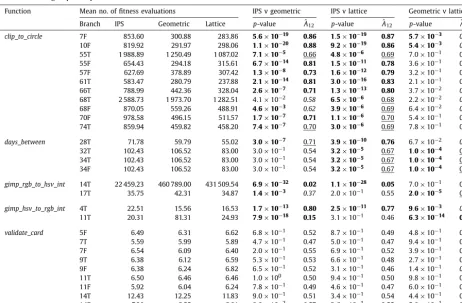
Manual software testing is a notoriously expensive part of the software development process, and its automation is of high concern. One aspect of the testing process is the automatic generation of test inputs. This paper studies the Alternating Variable Method (AVM) approach to search-based test input generation. The AVM has been shown to be an effective and efficient means of generating branch-covering inputs for procedural programs. However, there has been little work that has sought to analyse the technique and further improve its performance. This paper proposes two different local searches that may be used in conjunction with the AVM, Geometric and Lattice Search. A theoretical runtime analysis proves that under certain conditions, the use of these searches results in better performance compared to the original AVM. These theoretical results are confirmed by an empirical study with five programs, which shows that increases of speed of over 50% are possible in practice.
©2015 The Authors. Published by Elsevier B.V. This is an open access article under the CC BY license (http://creativecommons.org/licenses/by/4.0/).
1. Introduction
Testing software for functionalcorrectness can be classifiedas two distinct types of activity, black-boxtesting—where thesoftwareisexercisedwithrespecttoaspecification, formalorotherwise—and white-boxtesting,wheretestinputsare derivedwithrespecttothesoftware’sunderlyingprogramcode.Black-boxandwhite-boxtestingarecomplementary.While black-box testingcan check that all expected functionalityis present, i.e., trapping so-calledfaultsofomission, white-box testingcancheckforfaultsofcommission—unintendedsoftwarebehavioursnotdocumentedinthespecification,butpresent intheimplementation.
The degree to whichwhite-box testinghas beenperformed ismeasured by coverage metrics. The strongestcoverage metric is pathcoverage. A program “path” is simply the sequence of program statements executed through a program, decidedbytheoutcomesofdecisionsatconditionalsstatementssuchas
if
,while
andfor
etc.,andpathcoverageisthe proportionofall possiblepathsthroughthesoftwarethatwereexercisedbythetests.However, foranyrealisticprogram, fullpathcoverageisanunrealistictargetduetothepotentiallyinfinitenumberofpathsthat maybeinvolved[1].A more achievableandcommongoalisbranchcoverage,whereeverydecisionintheprogramisexecutedastrueandfalse.✩ ThisarticlewasoriginallyscheduledtobecompiledontheSpecialissueEvolutionaryComputation2013,nowgettingcompiledintoaregularissue. ✩✩ ApreliminaryconferenceversionwithpartsoftheresultsappearedatGECCO2013[11].
*
Correspondingauthor.1 ThisworkisfundedinpartbytheEPSRCproject“RE-COST”(grantno.EP/I010386).
2 TheresearchleadingtotheseresultshasreceivedfundingfromtheEuropeanUnionSeventhFrameworkProgramme(FP7/2007–2013)undergrant
agreementno.618091(SAGE).
http://dx.doi.org/10.1016/j.tcs.2014.12.009
Softwaretestingisanexpensiveandlabour-intensiveprocess.Onepotentialwaytolower thecostsinvolvedintesting is togenerateinputsforachievingwhite-boxcoverageautomatically, andatechnique that hasbeenofparticularinterest to researchers inrecentyears isthat of search-basedtestinputgeneration[17,13,16,26].In search-basedtesting, stochastic optimisation techniques are employed todrive the dynamic executionsof a pieceof softwaretowards the coverage ofa certaintestgoal,forexampletheexecutionofaparticularprogrambranch.Duetothenon-linearityofsoftware,itisusually non-obviouswhichinputswillexecutewhichbranches.Search-basedtestingreformulatesthepredicatesinaprogramthat guardtheexecutionofabranchintoa fitnessfunction,such thatinputscloserto satisfyingthose predicatesareawarded better fitness values.Thesefitnessfunctionsmaythen be optimised byan optimisation technique, suchasa randomised searchheuristic,tolocateaninputforaparticularbranch.
A simplelocalsearch optimisation technique thathas beenshowntobe effectiveforcovering branchesofprocedural programs istheAlternatingVariableMethod(AVM) [13].Ina recentempiricalstudybyHarmanandMcMinnwitharange ofCprograms, theAVMwasableto coverthemajorityofbranchesfasterthana geneticalgorithm [9].Thissuggeststhat theunderlyingfitnesslandscapeforcoveringindividualprogrambranchesisrelativelysimplemostofthetime,withmore “heavyweight”population-basedapproacheslikeGeneticAlgorithmsonlyrequiredinaminorityofcases[19].Despitethis, therehasbeenrelativelylittleworkdevotedtoanalysingandimprovingtheperformanceoftheAVMtechnique.
TheAVM canberegardedasageneralframework inwhichalocalsearchstrategyisappliedinturntoeachindividual input vectorvariableoftheprogramundertest.Inthispaper,weview thelocalsearchstrategytobeacomponentofthe overallframeworkthatmaybesubstitutedforanother.TheoriginalAVMappliedanacceleratedhillclimbthat wereferto asIteratedPatternSearch(IPS),where“exploratory”movesinadirectionoffitnessimprovementareproceededby“pattern” steps in thesame direction. Patternsteps iteratively increase insize foraslong asimprovements infitness continue.As soonasfitnesspeaks,exploratorymovesareagainmadetore-establishanewdirection.
Inthispaper,weproposetoreplaceIPSwithtwodifferentapproachesforexploringindividualdimensionsoftheinput vector—GeometricSearch andLatticeSearch (see Section5fordetails andformaldefinitions). Geometric andLatticeSearch are eliminationsearches that are able to find the optimum ofa one dimensional function that is unimodalon a given interval. Theywork bycomparingthefitness valuesoftwo pointsatpredeterminedpositions,usingtheresultto selecta newbutsmallersub-range.The algorithmiteratesuntilitisleftwithonepoint.GeometricSearch splitstherangeintwo bycomparingtwopositionsinthemiddleoftheintervaltodeterminewhetheranoptimumiscontainedinthebottomor tophalfoftheinterval.LatticeSearchcomparespointsthatareoffsetbyFibonaccinumbers.
We examineallthreevariantsoftheAVM throughtheoreticalruntimeanalysesandthroughempiricalexperiments,in ordertounderstandandimprovetheperformanceofthispopularapproachtosearch-basedtestinputgeneration.
WhilepriortheoreticalruntimeanalysesoftheoriginalAVMwithIPSinvolvedspecificprogramsandbranches[2,3],we furnishamoregeneralresult,provingthatforallunimodalfunctionsGeometricandLatticeSearcharefasterthanIPS,when usedintheframeworkofAVM.Inamoregeneralsense,GeometricandLatticeSearchconvergefastertolocaloptimathan IPS.Thesetheoretical resultsarecomplementedbyanempiricalstudyonopensourceprograms,involvingunimodalaswell asnon-unimodalfitnesslandscapes.Onmostbranchesthealternativelocalsearchesperformsignificantlybetter thanIPS. Thisincludesunimodallandscapes,inagreementwithourtheory,aswellasnon-unimodalones,wheretheassumptionsof our theoryare notmet.Thisindicatesthat fasterconvergencetolocaloptima isbeneficialona broadrangeofinstances. Theonlydeparturefromthispatternwasfoundforonecomplexlandscapeofatypeforwhich—asobservedinpriorstudies
[9,19]—a GeneticAlgorithmissignificantlybetterthanAVM.Afurthertheoreticalanalysisforthischallengingbranchshows that worse performanceisduetothekindoflocaloptimabeingreturned bylocalsearch.Onthisbranch,thealternative localsearchesarefasterinfindingsomelocaloptimum,butwhichlocaloptimumisreturnedhasanadverseeffectonglobal searchperformanceinthisspecificcase.
Thecontributionsofthispaperarethereforeasfollows:
1. TheincorporationoftwodifferentlocalsearchesGeometricSearch andLatticeSearchintotheAVMapproachforfinding testinputsforprograms(Section5).
2. Atheoreticalruntime analysisofthe localsearch usedin theoriginal AVM approach,IPS(Section 4),andGeometric andLatticeSearch,onunimodalfunctions.Startingatdistancesuptodfromtheglobaloptimum,IPShasaworst-case (regardingthechoiceofthestartingpoint)runningtimeof
Θ((
logd)
2)
oneveryunimodalfunction.Thesameholdsfor itsaverage-caseperformanceonasimpleunimodalfunction.GeometricandLatticeSearchperformwellonallunimodal functionsastheyonlyneedtime O(
logd)
intheworstcase(Sections5.1and5.2).3. AnempiricalanalysisoftheAVM,comparing IPS,Geometric andLatticeSearchon fiveprograms,includingunimodal and non-unimodal functions, complementing our theoretical results on unimodal functionsand providing additional evidence that the alternative local searches also speed up search on non-unimodal functions, possibly due to their fasterconvergencetolocaloptima(Section6).
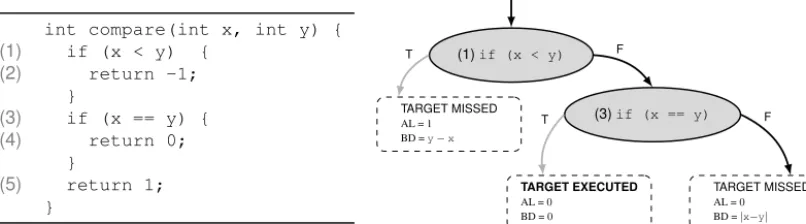
Fig. 1.Exampleprogramforwhichbranch-coveringtestinputsarerequired,andapartialcontrolflowgraph(CFG)showingfitnessfunctioncomputation (AL=approach level,BD=branch distance)forexecutionofthetruebranchfromthesecond“if”statementoftheprogramatCFGnode(3) (correspond-ingcontrolflowgraphnodenumbersappeartotheleftofrelevantcodestatements).
2. Background
Weintroducethefitnessfunctionandtherepresentationusedinthispaperforsearch-basedtestinputgeneration,the AVMalgorithm,andimportantbackgroundtotheoreticalruntimeanalysis.
2.1. Representationandfitnessfunction
Thefitnessfunctionforcoveringindividualprogrambranchesisamultivariatefunction mf
(
x)
→
R
,thattakesaninput vectorx=
(
x1,
x2,
. . . ,
xn)
,i.e.,anorderedlistofargumentsthatarepassed toaprocedure.Inthispaper,weassumexcanbemodelledasasequenceofintegers.Ourcontributionsnaturallyextendtorationalnumbers,whenthesearerepresented usingfixed-pointrepresentations(i.e.,afixednumberofdigitsisusedforbothintegerandfractionalpartsofanumber).
The fitness function measures how “close” an input vector was to executing a target branch. It is minimised by the search,witha zerovalue indicatingan input thatcoversthe branch.The fitnessfunctionhastwo components,whichwe describewiththeaidoftheexampleinFig. 1andtheexecutionofthetruebranchfromcontrolflowgraphnode (3).
Theapproachlevelrelatestothe decisionpointsinthe programappearing enroute toreaching thetarget branch,and reflectsthenumberofcontrolflowgraph(CFG)nodesunexecutedbyxonwhichthetargetbranchisdirectlyortransitively controldependent.ThesearedecisionnodesintheCFGthatmustbeexecutedwithaspecificoutcome,otherwisethetarget cannot be reached.Forexample,inFig. 1 the targetbranch iscontroldependent onthe
if
statementsatCFGnodes (1) and (3),asdemonstratedbythe (partially-drawn)CFG.Ifthe“wrong”choicesaremadeateitherofthesedecisionpoints (i.e.,thecondition evaluatestotruefornode (1)orfalsefornode (3)),thetargetisunexecutedbythepathtakenthrough thecontrol structure oftheprogram. Ifthetruebranch istakenatCFGnode (1),the approachlevel is 1,since node (3) is unexecuted.Ifthe false branchis takenfromnode (1),the approach levelis 0,since all control dependencieswill be executed.Thebranchdistanceiscomputedfromthevaluesofvariablesatpredicateswherecontrolflowdivergedfromthetargetat somecontroldependentCFGnode.Itisintendedasameasureof“howfar”theinputwasfromexecutingaconditioninthe requiredway,sothatcontrolflow isdirectedtowards,ratherthanawayfromthecurrenttarget inquestion.Forexample, in Fig. 1, ifthe input takesthe truebranch atCFG node (1),the branchdistance is computedusingthe formula
y
−
x
. Withthisformula,inputsarerewardedonthebasisofhowclosetheyaretomakingy
equalx
,whichwouldresultinthe alternative(anddesired)falsebranchbeingtakeninsteadofthetruebranch.Ifthesearchsucceedsinfindinganinputthat resultsinthefalsebranchbeingtakenatCFGnode (1),butthentakesthefalsebranchatCFGnode (3),thebranchdistance iscomputedusingtheformula|
x
−
y
|
.Thisformularewardsinputsthatareclosetobeingequal,inordertoencouragethe searchtowardsinputsthatresultinthedesiredtruebranchtobetakenintheexecutionpath.Table 1
Tracey’sbranchdistancefunctionsforrelationalpredicates(fromreference [29]).ThevalueK,K>0,referstoaconstantwhichisalwaysaddedifthe predicateisnottrue.
Relational predicate Branch distance computation
Boolean ifTRUEthen 0 elseK
a=b if|a−b| =0 then 0 else|a−b| +K
a=b if|a−b| =0 then 0 elseK
a<b ifa−b<0 then 0 else(a−b)+K
a≤b ifa−b≤0 then 0 else(a−b)+K
a>b ifb−a<0 then 0 else(b−a)+K
a≥b ifb−a≤0 then 0 else(b−a)+K
Inpractice,themaximumbranchdistancevariesfrombranchtobranch,dependingonthetypesofthevariablesinvolved in thebranchpredicate. Insteadof applyingcostlyanalysisto determinevariabletypes,it iseasier,inpractice,to simply apply agenericnormalisationfunction.Inthispaperweusethefunctionnorm
(
d(
x))
=
1−
1.
001−d(x),whered(
x
)
returns the value ofr+
K for x andnorm(
d(
x))
is the normalised branch distance.The complete fitness value is computedby normalisingthebranchdistanceandaddingittotheapproachlevel,i.e.,mf(
x)
=
AL(
x)
+
norm(
d(
x))
[31].Astheco-domain ofnorm is[
0,
1)
andtheapproachleveltakesintegervalues,thelatteralwaysrepresentsthedominatingterminthefitness function.Inother words,asearchpoint xhasabetter fitnessthan y ifitsapproachlevelissmaller,oriftheyhaveequal approach levels, butxhas asmaller branchingdistance.The choice ofthenormalisation functionis notimportantwhen only therelative rankingofsolutionsis ofconcern—asinthispaper—and identicalrankingsare produced(e.g.,whenthe constant 1.
001 isreplaced in norm with any other basegreater than 1); or,the lexicographic ordering of a bi-objective functionconsistingoftheapproachlevelandthebranchdistanceisminimised.2.2. Thealternatingvariablemethod(AVM)
The AVMcan be viewedasa generalframeworkthat proceedsfromarandom starting pointinthe searchspace, and works by calling a local search function on each element of the input vector inturn. That is,while the local search is performing“moves”ononecomponentofthevector,thevaluesforallotherdimensionsremainfixed.If,duringthissearch, afitnessofzeroisfound,theAVMterminateswiththebranch-coveringinput.If,however,alocaloptimumisreached,the AVM advancestothenextelement.Ifthefitnesscannotbe improvedaftercyclingthroughallelements, theAVMrestarts from another randomly-generated input, continuing the search for a branch-covering input until the number of fitness functionevaluationsexceedsapredefinedmaximum.
Algorithm 1 describesthe AVM framework moreformally.The initial vector ischosen uniformlyatrandom using the function random
( )
. The algorithm transforms the multivariate fitness function mf into a one dimensional projection f (line 5).Thefunction f isequivalenttoevaluatingmf withaninputvectorwhereallcomponentsexceptxiaresettocon-stantsandxiissubstitutedbythefreeparameterx.Thefunction f ispassedtoalocalsearchalgorithmcalledlocal_search,
alongwithxi,thestartingpointforthesearch.Thevariablec countshowmanyvariablesAVMhasoptimisedsincethelast
improvementofmf;itrestartswithauniformrandomvalueforxonceithascycledthroughallnvariableswithno suc-cessfulimprovementinfitness.Thefitnessfunctionkeepstrackofthenumberoffitnessevaluations,maintainingamapping of previously evaluatedvectorsto their corresponding fitnessvalues.Oncea branching-covering inputvector isfound, or whenthenumberofevaluationsexceedsthemaximum(i.e.,thesearchhasfailed),anexceptionisraisedtoterminatethe search(notshowninouralgorithmsforspaceandsimplicity).
Algorithm1TheAVMframeworkforoptimizingx
=
(
x1,
. . . ,
xn)
. 1:while true do2: letx:=random()
3: leti:=1,c:=0 4: whilec<ndo
5: let f:x
→
mf(x1,. . . ,xi−1,x,xi+1,. . . ,xn)6: letx:=local_search(f,xi)
7: ifmf(x)<mf(x)then 8: letx:= x,c:=0
9: else
10: letc:=c+1
11: leti:=(imodn)+1
2.3. Runtimeanalysisandrelatedwork
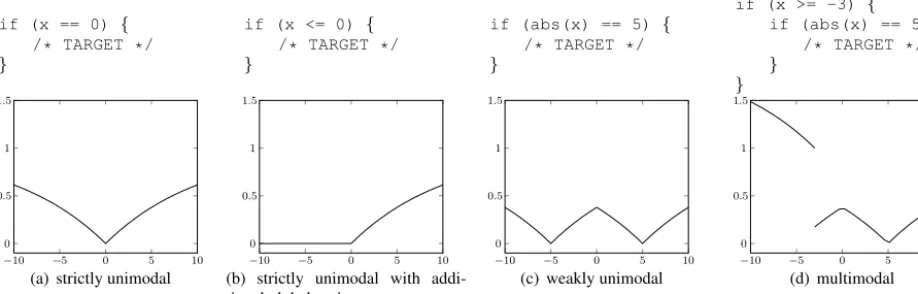
Fig. 2.Examplesofdifferentfitnesslandscapes,includingsimpleexamplecodeforasinglevariablexthatgeneratestheselandscapes;abs(x)denotesthe absolutevalueofx.Toeasepresentation,weusedK=0 inthebranchdistanceandthebase1.001 ofthenormalisationfunctionwaschangedto1.1 for generatingtheseplots.Thefunctionin(b)resultsfromthestrictlyunimodalfunction (a)andaddingglobaloptimaforx<0.In (d)valuesx<3 leadtoa highfitnessvaluebecauseoftheworseapproachlevel.
algorithms. Runtime analysis has established itself asa leading theory in randomised search heuristics, with many new resultsinthelast15years [25,4,10].Inparticular,inthearea ofsearch-basedsoftwareengineeringrecentresultsinclude computinginput-outputsequences[14,15],testinputgeneration[3],andsoftwareprojectscheduling[21,22].Thefollowing paragraphsreviewrelatedworkinruntimeanalysis.
Arcuri,Lehre,andYao [3]were thefirsttopresentaruntimeanalysisofsearch-basedinput generation.Theyfocussed onthetriangleclassificationproblem,whichinvolvesthreeintegervariablesdescribingsidelengthsofapotential triangle. Thetaskistoclassifytheinputasascalene,equilateral,orisoscelestriangle,ornotrepresentingatriangle.Theiranalysis waslimitedtothetimeforcoveringtheequilateralbranchoftheproblem.Iftherangeofinputvaluescontainsnnumbers, the expected time of random search is
Θ(
n2)
. Hill climbing needs expected timeΘ(
n)
, i.e., in every iteration a singlevariableisincreasedordecreasedby 1.FortheAVMtheyprovedanupperboundof O
((
logn)
2)
andaweakerlowerbound ofΩ(
logn)
[3].Lateron,Arcuri[2]extendedtheanalysisoftheAVMtoallbranchesofthetriangleclassificationproblem,showingthat theexpectedrunningtimeisboundedfromabovebyO
((
logn)
2)
onallbranches.Certainbrancheswithmanyglobaloptima (cf.Fig. 2(b)onp.5)onlyneed O(
logn)
time.InthispaperweextendhisresultsbyprovinganupperboundofO((
logn)
2)
forallstrictlyunimodalfunctions(andfunctionswithfurtherglobaloptima).
The performance ofsearch heuristicson unimodal functions was also studied by Dietzfelbinger, Rowe, Wegener, and Woelfel [6,5]. Theyshowed that algorithms that randomly displace thecurrent position ofa search algorithm using any fixed probability distribution needatleast
Ω((
logd)
2)
time inthe worst case, whenthe initial distanceto theoptimumischosenfrom
{
1,
. . . ,
d}
.Thus,noalgorithmusingsuchafixeddistributioncandobetterthantheoriginal AVM.Inother words,everylocalsearchstrategyaimingatbetterperformance needstouseaprobabilitydistribution,orsearchstrategy, thatdependsontheinitialpoint.ThisisthecaseforallAVMvariantsconsideredhere.3. Preliminaries
Ourtheoreticalanalysesfocusonthe timeforfindingalocaloptimumusinglocalsearchwithin theframeworkofthe AVM. Recallthat these localsearches are executed on one coordinate ofthe multivariate fitness function. We count the numberoffunctionevaluations,alsocalledfitnessevaluations,madeby localsearchuntilanoptimumisfoundforthefirst time.Themotivationforconsideringfitnessevaluationsisthatsuchanevaluationisthemostcostlyoperationasitinvolves executingtheprogram.Insomecaseswecountuniquefitnessevaluations,i.e.,thenumberofdifferentsearchpointsevaluated. Thisreflectsthefact thatitiseasyto cachepastevaluations,soevaluatingthesamepointtwice onlyincursinsignificant additionalcost.
In our analyses we consider local search minimising a function f:D
→
R
for a finite domain D⊂
Z,
which can be regardedaprojection ofthemultivariate fitnessfunctionmf.Foreaseofpresentation, weassume f(
x)
= ∞
forall x∈
/
D. This includessettings where f is thebranch distancebefore orafter normalisation.As alreadynoted inSection 2.1,the precise choice of a normalisation function is irrelevant in our work; all local searches analysed in this work only use informationabouttheranksofsearchpoints.Soeverystrictlyincreasingnormalisationfunctionleadstothesamesequences ofsearchpointsqueriedandhencethesameperformance.Intheremainder,wewilldealwiththefollowingfunctionclasses,illustratedinFig. 2.Afunction f:D
→
R
withdomain D⊆
R
iscalledstrictlyunimodalifitonlyhasasinglelocaloptimum.If f istobeminimised(the caseofmaximisationis symmetric)thismeansthatf
(
1) >
f(
2) >
f(
opt) <
f(
r1) <
f(
r2)
(1)forall
1
<
2<
opt<
r1<
r2,whereopt=
min(
f)
istheglobalminimumof f.Inotherwords, f isstrictlydecreasingon D∩
(
−∞
,
opt]
andstrictlyincreasing on D∩ [
opt,
∞
)
.Theupperboundsobtainedintheremainder fortherunningtime ofAVMonstrictlyunimodalfunctionsalsoapplytofunctions f thatresultfromtakingastrictlyunimodalfunction f and assigningfunctionvaluesmin(
f)
tofurtherpoints,formally:∀x
∈
D:f(
x)
∈
f(
x),
minf.
(2) Fig. 2(b)showsonesuchexample.Notethatingeneralglobaloptimaarenotrequiredtoformoneinterval.In orderto classify real-world fitnesslandscapes inSection 6, we alsoconsider weaklyunimodal functions, definedas functionswhereall localoptimaarealsoglobaloptima.Incontrasttostrictly unimodalfunctionswithadditionaloptima, weaklyunimodalfunctionsmaycontainseveral“basinsofattraction”,seeFig. 2(c).Multimodalfunctions,ontheotherhand, aredefinedasfunctionswithmultiplelocaloptimasuchthatnotalllocaloptimaarealsoglobaloptima,seeFig. 2(d).
Notethatbothweaklyunimodalandmultimodalfunctionscanbedecomposedintoseveralstrictlyunimodalfunctions, each ofwhichhastheir own“basinofattraction”.Thelattercanbe definedasaninterval,asubset ofthedomain,where f isstrictlyunimodal.Forexample,inFigs. 2(c)and 2(d)wehavetwobasinsofattractions
[−
10,
0]
and[
0,
10]
(boundary points can bepartoftwo basinsofattractions). OuranalysesofAVM variantsfinding globaloptima onstrictly unimodal functionscarryovertofindinglocaloptimaonweaklyunimodalandmultimodalfunctionsundertheassumptionthatAVM neverleavesthestarting point’sbasinofattraction.Fig. 2(c)givesanexampleofalandscapewherethisassumptionholds foralmostallstartingpoints.4. AnalysisoftheoriginalAVM
4.1. OriginalAVMwithIPS
TheoriginalAVMduetoKorel[13]usesthefollowinglocalsearch,showninAlgorithm 2,thatwenameIteratedPattern Search (IPS). Startingatx,IPSfirst evaluatespoints x
−
1 andx+
1 to identifyagradient.Unless xisa localoptimum,it then performsaso-calledpatternsearch, movinginthedirectionofdecreasing f-values.The stepsizedoubleswitheach step,sowhenthegradientistowardsincreasingindicesIPStraversesthepointsx
,
x+
1,
x+
1+
2,
x+
1+
2+
4, . . . ,
x+
1+
2+
4+ · · · +
2j.
Since
ij=02j=
2j+1−
1 thissequenceisequaltox
,
x+
21−
1,
x+
22−
1,
x+
23−
1, . . . ,
x+
2j+1−
1.
Pattern search stopsifthenext point doesnotimprovethe fitness,which happensonunimodalfunctionswhenthe op-timum isbeingovershot. Thisprocess isiterated;that is,IPSthenstarts anotherexploration.Ifthe functionisunimodal, IPSgetsclosetotheoptimumovertime.However,thislinesearchcanberelativelyslow.ThereasonisthatIPSaccelerates duringexploration,butafterovershootingtheoptimumIPSstartsanotherexplorationfromscratch.
Algorithm2IteratedPatternSearch,startingatx
∈
D.1:while true do
2: iff(x−1)≥f(x)and f(x+1)≥f(x)returnx 3: iff(x−1)<f(x+1)thenletk:= −1elseletk:=1 4: whilef(x+k)<f(x)do
5: letx:=x
+
k,k:=2k4.2. UpperboundfororiginalAVM
WestartourinvestigationswithIteratedPatternSearch,thelocalsearchusedintheoriginalAVM[13].Anupperbound O
(
log2n)
(for domainsize n) was provenforAVM withIPSin [3],forthe specialcasethat thereis alinear relationship betweenthefunctionvalueandthedistancetotheoptimum.Thefollowingstatementholdsforarbitrarystrictlyunimodal functions.Hereandintheremainderlog denotesthebinarylogarithmlog2.Thelaststatementimpliesthatwegetanupperboundoforder O
((
logd)
2)
formanyfurthercommonfunctions. Exam-plesarefunctionswhereopt isaglobaloptimumandallpointsx>
opt or x<
opt areglobaloptimaaswell(seeFig. 2(b)). Inparticular,allfunctionsconsideredinArcuri’swork[2]arecoveredbythisstatement.However,forfunctionswithmany globaloptimatheupperboundmaynotbetight[2].ProofofTheorem 1. Weallowthealgorithmtotraversepoints outsideof D,butassumethatallx
∈
/
D areworsethanall x∈
D.WeconsiderpassesofIPS,corresponding tooneiterationoftheouterwhileloopinAlgorithm 2:a passstartswithan exploratorysearch examiningthetwo neighbouringsolutions ofthecurrentpoint(index
±
1). Itthen performsa pattern search,doublingthedistancetravelledineachstep.Notethatapassstartingwiththeoptimummakesexactly3queries.If apassqueriespointsuptoadistanceofi
j=02j=
2i+1−
1 fromtheinitialvalue,itqueriesi+
3 values.Withoutlossofgenerality assumethat thecurrentpositionis0andtheoptimum isatd.Ifd
=
1 weneed4queries, henceweassumeinthefollowingthatd≥
2.Weclaimthatwithinatmost2passesthedistancetotheoptimumhasbeen reducedtoatmostd/
2.Leti betheuniqueintegersuchthat2i−
1≤
d<
2i+1−
1.Notethatpatternsearchqueries2i−
1and2i+1
−
1 asthepointsarestrictlyimprovingin[
0,
2i−
1]
.Weconsidertwocases.Firstassumethat2i−
1 isbetterthan 2i+1−
1.Thenpatternsearchstopsat2i−
1 andsinced≤
2i+1−
2 thenewdistancetotheoptimumisatmostd/
2.The numberofqueriesmadeisatmosti+
3,andsinced≥
2i−
1≥
2i−1thisisatmost logd+
4.Now consider the case that 2i
−
1 is worse than 2i+1−
1. This implies 2i≤
d≤
2i+1−
2. Then pattern search will query2i+2−
1 andstopat2i+1−
1 as2i+2−
1 isworsethan2i+1−
1.Thesecondpasswilltraversepositions2i+1−
21,
2i+1
−
22,
2i+1−
23. . .
.Since byunimodality allpoints in[
0,
2i]
areincreasingly better,patternsearch willstop atsome2i+1
−
2j with0≤
j≤
i.Astheoptimummustbewithin[
max(
2i,
2i+1−
2j+1),
2i+1−
2j−1]
,andthenewcurrentpointis 2i+1−
2j,thedistancebetweenthecurrentpointandtheoptimumhasdecreasedtoatmost 2j for j<
iand2i−1for j=
i. Inbothcasesthenewdistanceisboundedbyd/
2.Intheworstcase,weneedonepassqueryinguptoi
+
4 values,andasecondpassqueryinguptoi+
3 points.Thetotal is2i+
7≤
2logd+
7 asd≥
2i.The total numberofqueries made, T
(
d)
, isthen subjectto the followingrecurrence: T(
0)
=
3, T(
1)
=
4,and T(
d)
≤
2
logd+
7+
T(
d/
2)
ford>
1.Thefloorfunctionsinthisformulaimplythat,whenrepeatedlyexpandingtermsT(
·
)
,we getthesamerecurrenceforT(
d)
asforT(
2logd)
.SolvingthelattergivesT
(
d)
≤
logdk=1
(
2k+
7)
+
T(
1)
≤
2·
logd(
logd+
1)
2
+
7logd+
T(
1)
≤
(
logd)
2+
8 logd+
4.
Thelast remarkofthestatement holdstruesinceaddingfurtherglobaloptimacanonlydecreasetheexpectedtimeuntil someglobaloptimumisfound.
2
4.3. OriginalAVMisslowintheworstcase
The followingresultshowsthat theupperbound fromTheorem 1isasymptotically tight.Both boundstogether show thattheworst-caserunningtimeofIPSisoforder
Θ((
logd)
2)
,wheninitialpointsup todistancedareallowed.Notethat theresultappliestoeveryunimodalfunction,henceAVMalwayshasabadworst-caseperformance.Theorem2.ConsiderIteratedPatternSearchminimisinganarbitrarystrictlyunimodalfunction f:
Z
→
R
.Iftherearefeasiblestarting pointswithdistances0,
1,
. . . ,
d totheoptimum,theworstcasenumberofuniquefitnessevaluationsisatleast(
logd)
210
−
O(
logd).
Proof. Wecanassumew.l.o.g.thattheoptimumisatposition 0.IfthedomainD isboundedononeside,weconsideran extendedfunction f wherethedomainis
Z
and f(
x)
= ∞
forall x∈
/
D.The challenge in proving the statement is that it holds for an arbitrary unimodalfunction f. We do not know any details of thisunimodal function; we only knowfrom (1)that f is monotonically decreasingin the negative range and monotonically increasing in the positive range. This shape implies that when IPS overshoots the optimum by travelling (w.l.o.g.towardsincreasingindices)fromapoint
<
0 towardsr>
0,thecomparisonof f()
and f(
r)
determineswhether apassofIPSwillstopatorr,triggeringthenextpassfromthere.Notethatthesearetheonlytwopossibilitiesdueto(1). Notethatthedistancetotheoptimumfor
andrisnoreliableindicatorforthecomparisonof f
()
and f(
r)
:evenif,say,Themainideaoftheproof istoconsidertwoworst-casestartingpointswithinarangethatgrowswithaparameter i: a point
i
<
0 left ofthe optimum andanother point ri>
0 right of the optimum.Having a worst-casepoint on eithersideoftheoptimumisnecessaryasIPSmaystopapassoneithersideoftheoptimum.Weprovidealowerboundforthe fastest timestarting from either
i orri.Then we consider alarger rangeforparameter i
+
1 anddetermine worst-casepoints
i+1 andri+1.Thesepointsarechosenbasedon
i
,
riandthecomparisonof f(
i)
and f(
ri)
,insuchawaythatIPSstartingfromeither
i+1 orri+1 willstopapassatthebettersearchpointamong
iandri.Astheabove-mentionedlower
bound appliestothefastesttimefromeither
i orri,thisallowsustoaddthislowerboundtothetimeittakestotravel
from
i+1 orri+1 to
i orri.Wegeta newlower boundforthefastesttime fromeither
i+1 orri+1.The claimedlower
boundthenfollowsbyinductionoveri.
Formalisingthisidea,wedefine Ts
(,
r)
asthenumberofdifferentsearchpointsevaluatedwhenIPSstartsins,countingevaluationsfromtheset
{
,
. . . ,
r}
only.Ifs∈
/
DweletTs(,
r)
:= ∞
.LetT(,
r)
:=
min{
T(,
r),
Tr(,
r)
}
bethesmallestsuchnumberwhenstartingfromeither
orr.
Define
0
=
r0=
0 andT(
0,
r0)
=
1.Assumewehavei
≤
0≤
riforsomei∈
N
0,suchthatiandriarenotbothoutside f’sdomain.Let
Δ
i:=
2log(ri−i)+1 fori∈
N
andΔ
0:=
1 bethesmallestpowerof 2suchthatΔ
i>
ri−
i.
We define newpoints
i+1
,
ri+1 according tothe followingcasedistinction.First assume f(
i)
>
f(
ri)
,whichimplies f(
x)
>
f(
ri)
forallx≤
i.Italsoimpliesthatriexists.Letri+1
:=
ri+
Δ
i−
1 andi+1
:=
ri−
2Δ
i+
1.IfIPSstartsatri+1,itwillsamplepointsat
ri+1
,
ri+1−
21
−
1, . . . ,
ri+1−
2log(Δi)
−
1=
ri
,
ri−
Δ
iandsincethefitnessimprovesineverystepbutthelastone,IPSwillstopatriandrestartexplorationfromthere.Allpoints
butri
−
Δ
iareguaranteedtoexistandarecontainedin{
i+1
,
. . . ,
ri+1}
;soIPSevaluatesΔ
i+
1 differentsearchpointsfromthat set beforerestartingexploration.From ri IPSneedstime atleast T
(
i,
ri)
−
1 sincesofar IPShasevaluated asinglesearchpointfromtheset
{
i
,
. . . ,
ri}
,namelyri.WethushaveestablishedtherecurrenceTi+1
(
i+1,
ri+1)
≥
Δ
i+
T(
i,
ri).
(3)Similarly,if
i+1existsandIPSstartsfromthere,itwillsamplepointsat
i+1
,
i+1+
21−
1, . . . ,
i+1+
2log(Δi)−
1=
ri−
Δ
i,
ri,
ri+
2Δ
i.
Thefitnessimprovesineachstepbutthelastone,andsoIPSwillstopatri andstartexplorationfromthere.Notcounting
theevaluationofri
+
2Δ
i,IPSevaluatesΔ
i+
2 searchpoints,henceasabovewegetTri+1
(
i+1,
ri+1)
≥
Δ
i+
T(
i,
ri)
+
1.
(4)Putting(3)and(4)together,wehaveshown
T
(
i+1,
ri+1)
≥
Δ
i+
T(
i,
ri).
Thisalsoholds when
i+1
∈
/
D asthen Ti+1(
i,
ri)
= ∞
.The case f(
i)
<
f(
ri)
issymmetric,andif f(
i)
=
f(
ri)
we alsogetthesamerecurrenceasIPSstopsatri asinthecase f
(
i)
>
f(
ri)
whenstartingfromi+1 andIPSstopsat
i asonthe
othercasewhenstartingfromri+1.
Itfollowsthat
T
(
i,
ri)
≥
i−1j=1
Δ
j+
T(
0,
r0)
≥
1+
i−1j=1
log
(
rj−
j
).
Note thatfori
≥
1 the differenceri+1−
i+1 doesnotdependon whether f
(
i)
>
f(
ri)
ornot,hencew.l.o.g.we usethedefinitionof
i+1
,
ri+1 fromthecase f(
i)
>
f(
ri)
.AlongwithΔ
i≥
ri−
i
+
1 wegetri+1
−
i+1
=
ri+
Δ
i−
1−
(
ri−
2Δ
i+
1)
=
3Δ
i−
2>
3(
ri−
i
).
Expandingandusingr1
−
1
=
2 yieldsri+1
−
i+1
>
2·
3i.
Thus,
T
(
i,
ri)
≥
1+
i−1j=1
log
2·
3j−1=
i+
i−2
j=0
log
3j=
i+
log(
3)
·
(
i−
2)(
i−
1)
2
>
log(
3)
2
·
iItiseasytoverifybyinductionthatri
≤
7i−1and|
i
|
≤
7i−1 foralli∈
N
.Puttingi:=
log7(
d)
+
1 alongwithi≥
log7(
d)
=
log7
(
2)
·
log2(
d)
thengivesalowerboundoflog
(
3)
2
·
log7
(
2)
2·
(
logd)
2−
O(
logd) >
(
logd)
2
10
−
O(
logd).
2
4.4. OriginalAVMisslowonaverage
The bad worst-case performance ofIPS is not simply dueto a few unlucky choicesof theinitial point. In fact, most startingpointsleadtoarunningtimeoforder
Θ((
logd)
2)
.Toseethis,weconsiderthespecificfunction f(
x)
= |
x|
,whichis equivalenttothenormalisedfunctionfromFig. 2(a).Weshowthatwhenthestartingpointischosensuchthatthedistance betweenstartingpointandtargetisuniforminsomeinterval,thenwestillgetalowerboundoforder(
logd)
2.Notethat f
(
x)
= |
x|
isquiteaneasyfunctionaspointsclosertotheoptimum 0arebetter thanpointsthatarefurther awayfromit.ThisencouragesIPStostopattheclosestpointtotheoptimumtraversedinapatternsearch,butwestillget atimeofΩ((
logd)
2)
.Theorem3.ConsiderIteratedPatternSearchminimisingthefunction f
(
x)
= |
x|
suchthatthestartingpointischosenuniformlyat randomfrom{−
2i,
. . . ,
2i−
1}
,forsomei∈
N
0.Theexpectednumberofuniquefitnessevaluationsisatleast i2
6.
Note that thechoice of the initial starting point corresponds to choosing arandom integer in thetwo’s complement representationoni
+
1-bitwords,thestandardmethodforrepresentingsignedintegersinprogramminglanguages.ProofofTheorem 3. Let T
(
i)
denotethe expectednumber ofdifferent search points queried when the starting point is chosenuniformlyatrandomfrom{−
2i,
. . . ,
2i−
1}
.Theclaim T(
i)
≥
i2/
6 istrivialfori=
0 andi=
1.IfIPSstartsatsomevaluex
<
0 (thecasex>
0 issymmetric),IPSwillstartapatternsearchexploringpointswithhigher indices,queryingpointsatx1:=
x+
20,x2:=
x+
20+
21,x3:=
x+
20+
21+
22,etc.(Wedonotcountapotentialevaluationofthepointatx
−
1 sinceitmightnot beinthedomainoffeasiblesearch points.)Letxj:=
x+
j−1=02
=
x+
2j−
1 for1
≤
j≤
i bethefirstsearchpointqueriedwherexj≥
0.NowIPSwillstoppatternsearchandcontinuewitheitherxj−1 or xj,dependingonwhichisbetter.Ifxj isbetter,IPSwillalsoqueryxj+1;butasthismightbeoutofrange,wedonotcountapotentialevaluationofxj+1.
Duetothefitnessfunctionused,thepointwiththesmallerabsolutevaluefromeitherxj−1orxjisbetter.Notethattheir
indexdifferenceisxj
−
xj−1=
2j−1,soxj∈ {
0,
. . . ,
2j−1−
1}
.Ifxj∈ {
0,
. . . ,
2j−2−
1}
,xj isbetterthanxj−1,andIPSstartsanotherpassat
{
0,
. . . ,
2j−2−
1}
.Otherwise, xj−1 isbetter andIPSwillstartanotherpassat{−
2j−2,
−
2j−2+
1,
. . . ,
−
1}
.Allthesepositionsareattainedwiththesameprobability,henceweareinthesamesettingasdescribedinthestatement, with j
−
2 inplaceofi.The probability of stoppingat xj being thefirst point where xj
≥
0 (xj≤
0 whenstarting atx>
0), for 1≤
j≤
i, is2
·
2j−1/
2i+1=
2j−i−1astherearexj−
xj−1=
2j−1positionsforxwherethishappenswhenx<
0 andthesameholdsfor x>
0.Recallthatallinitialpositionsarechosenuniformlyatrandom,andthereare2i+1 feasiblepositions.Whilegettingtoxj IPShasqueriedatleast j
+
1 mutuallydifferentpointsx,
x1,
. . . ,
xj.Then theremainingtime isatleastT
(
j−
2)
−
1;thereasonforsubtracting1isthatwehavealreadyqueriedxj.DefiningT(
−
1)
:=
0,wehaveestablishedthefollowingrecurrence
T
(
i)
≥
i
j=1
2j−i−1
·
j+
1+
T(
j−
2)
−
1=
i
j=1
j
·
2j−i−1+
i
j=1
2j−i−1
·
T(
j−
2)
=
i−1
j=0
(
j+
1)
·
2j−i+
i−2
j=−1
2j−i+1
·
T(
j)
=
i−1
j=0
(
j+
1)
·
2j−i+
i−2
j=0
2j−i+1
·
T(
j)
asT
(
−
1)
=
0.Alongwithi
j−=10(
j+
1)
·
2j−i=
i−
1+
2−i,wegetT
(
i)
≥
i−
1+
2−i+
i−2
j=0
Assumeforaninductionthat T
(
j)
≥
j2/
6 all0≤
j<
i.ThenT
(
i)
≥
i−
1+
2−i+
i−1
j=0
2j−i
·
j2
6
=
i−
1+
2−i+
1 6·
i−1
j=0
2j−i
·
j2=
i−
1+
2−i+
1 6·
−
4i+
6+
i2−
6·
2−i=
i26
+
i
3
whichimpliestheclaim.
2
5. AlternativelocalsearchesfortheAVM
We now show that other local searches used in the framework provided by AVM only require
Θ(
logd)
evaluations insteadofΘ((
logd)
2)
.ThisyieldssignificantspeedupsoverAVM’soriginallocalsearchmethodIPS,iftheinitialdistanced totheoptimumisnotverysmall.Our results formally only hold for unimodalfunctions, butthey also indicate more generallythat the alternate local searchesconvergefastertolocaloptima.Thereasonisthatthebasinofattractionaroundalocaloptimumhastheproperties ofa unimodalfunction.So,ouranalysisisapplicablewheneverthesearch doesnot leavetheinitialbasin ofattraction.It further canbe used toestimate theremaining runningtime afterthe searchhas reachedacertain basin ofattractionas above.
5.1. AVMwithgeometricsearch
Weproposetousemorecleverlocalsearchesthatlocatetheoptimumofaunimodalfunctionmoreefficientlyafterthe firstexploration.ThefollowingGeometricSearchusesavariantofbinarysearch.Theideaistoperformapatternsearch,and thentousebinarysearchtohomeinonthetarget.Therebyweareusingthefollowingfact:ifpatternsearchqueriessearch points xj−1
,
xj,
xj+1,stoppingatxj,weknowthat f(
xj−1)
>
f(
xj)
≤
f(
xj+1)
.Thisimpliesthat,if f isunimodal,theglobalminimum mustlie intheset
{
xj−1,
. . . ,
xj+1}
.Wecall it“GeometricSearch” sincethe initialpatternsearch isperformedwithageometricsequenceofnumbers.
Algorithm3GeometricSearch,startingatx
∈
D.1:if f(x−1)≥f(x)and f(x+1)≥f(x)returnx 2:if f(x−1)<f(x
+
1)then letk:= −
1else letk:=1 3:while f(x+k)<f(x)do4: letx:=x+k,k:=2k
5:let:=min(x−k/2,x+k),r:=max(x−k/2,x+k)
6:while<rdo
7: if f((+r)/2)<f((+r)/2 +1)then
8: r:= (+r)/2
9: else
10: := (+r)/2 +1
11:return
ThefollowingresultshowsthatAVMwithGeometricSearchfindstheoptimumofanyunimodalfunctionintime loga-rithmicintheinitialdistance.
Theorem4.Consideraone-dimensionalsearchonaunimodalfunction f:
Z
→
R
whered≥
1denotestheinitialdistancefromthe startingpointtotheoptimum.ThenGeometricSearchfindsanoptimumafterqueryingatmost3logd+
5searchpoints.Proof. Letibesuchthat2i
≤
d<
2i+1.BythesameargumentsasintheproofofTheorem 1patternsearchstopsateither2i
−
1 or2i+1−
1 afterqueryingatmosti+
3 points.Wepessimisticallyassumethatitstopsat2i+1−
1,whichresultsin thealgorithmputting:=
2i−
1 andr:=
2i+2−
1.Weclaimthateachiterationofbinarysearchupdates,
rtowards,
r suchthatr−
≤
(
r−
)/
2.Ifr=
(
+
r)/
2wehaver
−
=
+
r2
−
=
r
−
Otherwise,
=
+2r+
1 andusing−
x−
1≤ −
xforx∈
R
wegetr
−
=
r−
+
r2
−
1≤
r+
−
+
r2
=
r
−
2
.
Initially r
−
<
2i+2, andduetothe floorfunctionswe get thesame recurrence asfor2i+1.Two queriesare neededto replacethecurrentdistancebyitsfloored half,endingat0withnofurtherqueries.Henceweneedan additionalamount of2i+
2 queries,leadingtoatotalof3i+
5≤
3logd+
5 queries.2
Itiseasytoseethat,inthesettingofTheorem 4,GeometricSearchalwaysneeds3logd
±
O(
1)
queries:theinitialpattern search queries logd±
O(
1)
points before proceedingto an elimination search on an interval oflengthΩ(
d)
. Geometric Search onlystops afterthisinterval hasbeen reducedto asingle point. Sincehalving thisinterval makes 2queries, this processrequires2logd±
O(
1)
furtherqueries.5.2. AVMwithLatticeSearch
LatticeSearch[23,Section 8.2]isarefinementofFibonacciSearch[12]forintegerdomains.TheideaofFibonaccisearch istoevaluatesearchpointsaccordingtoFibonaccinumbers F1
=
1,
F2=
1,andFn+2=
Fn+
Fn+1 forn∈
N
insuchawaythat only onenew search pointneeds to be evaluated ineach iteration. Assumewe know that theoptimum isin some interval
[
,
+
Fn]
.Fibonaccisearch wouldthen compare+
Fn−2 and+
Fn−1.If f(
+
Fn−2)
≤
f(
+
Fn−1)
we knowthatanoptimummustbeintheinterval
[
,
+
Fn−1]
,andweiteratebycomparing+
Fn−3 and+
Fn−2.Thelatterpointhas alreadybeen evaluated, hence only one newevaluation is required.Likewise, if f
(
+
Fn−2)
>
f(
+
Fn−1)
then anoptimummustliein
[
+
Fn−2,
Fn]
andweiteratebysetting:=
+
Fn−2 andevaluating+
Fn−3 and+
Fn−2.Since+
Fn−3=
+
Fn−1,ithasalreadybeenevaluated,againleavingjustonenewevaluation.In terms of unique evaluations, Fibonacci search is faster than Geometric search. Kiefer [12] showed that Fibonacci Search incontinuousdomains isanoptimalsearch techniqueinthefollowingsense. Considerall searchtechniquesusing afixednumberoffunctionevaluations.ThenFibonaccisearch hasthelargestpossibleintervalofinputvaluesforwhichit guaranteestofindasolutionwhosequalitydiffersbyatmost
ε
>
0 fromthatofanoptimum.LatticeSearchfurtherrefinesthisprinciplebyexploitingthatforintegerdomainsinthecase f
(
+
Fn−2)
≤
f(
+
Fn−1)
thelastpoint
+
Fn−1 cannotbetheuniqueoptimum,hencetheintervalreducesbyonefurtherpointto[
,
+
Fn−1−
1]
.Likewise,intheothercasetheintervalbecomes
[
+
Fn−2+
1,
Fn]
.Inbothcasestheintervalisreducedby1point,comparedto Fibonacci search. Thesegains accumulate in each iteration, and LatticeSearch onintegers needs even fewer function evaluationsthanFibonacciSearchonacomparablecontinuousdomain.
It isknownthat Latticesearch canfind theminimumof aunimodalfunction ona domainofintegers
{
1, . . . ,
Fn−
1}
using n
−
2 function evaluations [23, p. 190] (note that Monahan [23, p. 190] uses the definition F0=
1, F1=
1, F2=
2,
. . .
).ThelocalsearchusingLatticeSearchisshowninAlgorithm 4.
Algorithm4LatticeSearch,startingatx
∈
D.1:iff(x−1)≥f(x)and f(x+1)≥f(x)returnx 2:iff(x−1)<f(x+1)thenletk:= −1else letk:=1 3:whilef(x+k)<f(x)do
4: letx
:=
x+k,k:=2k5:let
:=
min(x−k/2,x+k),r:=max(x−k/2,x+k)6:letn:=min{n|Fn≥r−l+2}
7:whilen>3do
8: if+Fn−1−1≤rand f(+Fn−2−1)
≥
f(+Fn−1−1)then9: let
:=
+Fn−210: letn:=n−1 11:return
Notethattheinitialpatternsearchisdoneinageometricfashion,i.e.,increasingthestepsizegeometricallyasinIPSand Geometric Search. Thereis arelatedsearch technique calledFibonaccianSearching [7](notto beconfused withFibonacci Search) where patternsearch is done by means of Fibonacci numbers.The reasonthat we are using geometric pattern searchisthatitisgenerallyfaster.
LatticeSearchfurtherimprovestheleadingconstantprecedingthelogdterm;usingFibonaccinumberstosearchforthe optimumintheintervalidentifiedbypatternsearchismoreefficientthanthebinarysearchusedinourGeometricSearch procedure.
Proof. Asinthepreviousproofs,patternsearchstopsafterqueryingatmost
logd+
3≤
logd+
4 points.Afterwards,lattice searchisrunonanintervalofsizeatmost 4d.Let Fm bethesmallestFibonaccinumbersuchthat Fm
−
2≥
4d.WeknowthatLatticeSearch onaset{
1, . . . ,
Fm−
1}
usesm
−
2 functionevaluations[23,p. 190]withourdefinitionof Fm.Thiscorrespondstooursettingafteratrivialindextransformation.
Usingawell-knownclosedformulaforFm,
Fm
=
(
1+
√
5)
m−
(
1−
√
5)
m2m
·
√
5,
wegetforoddm,using
(
1−
√
5)
m<
0,Fm
≥
1
√
5
·
1
+
√
5 2 m.
Forevenm,weclearlyhave
Fm
≥
Fm−1≥
1
√
5
·
1
+
√
5 2 m−1=
√
25
+
5·
1
+
√
5 2 m.
Therefore,therequiredinequality Fm
≥
4d+
2 isimpliedby1
+
√
5 2 m≥
(
4d+
2)
·
√
5
+
5 2⇔
m≥
log((
4d+
2)
·
√ 5+5
2
)
log
(
1+ √5
2
)
.
The last term on the right-hand side is upper-bounded by 1
.
45logd+
5. It follows that lattice search requires at most m−
2≤
1.
45logd+
3 evaluations.Alongwiththetimeforpatternsearchthisprovestheclaim.2
6. Experiments
WenowprovideanempiricalcomparisonoftheAVMusingouralternativelocalsearchestocomplementourtheoretical results.Wefirstshowresultsonsimplefunctions,designedtoprovideadditionalempiricalevidenceaboutthebetter scala-bilityofthealternativelocalsearches.However,real-worldprogramsarenotsostraightforward,involvingfitnesslandscapes ofvaryingshapes.Therefore,followingsomesimpleinitialexperiments,wecontinueontoperformingexperimentswithfive real-worldprograms.
6.1. Experimentswithunimodalfunctions
WereturntothesimpleandillustrativeproblemfromFig. 2(a)withjustasinglevariable,recallingthatthiscorresponds tothefollowingprogram:
void is_zero(int x) {
if (x == 0) { /* TARGET BRANCH */ }
}
The goalistofindaninput xthatisequaltozero.Theapproachleveliszero(sincethebranchingcondition isalways reached), andthebranchdistanceis norm
(
|
x|
)
.Becausethe localsearchesdonot relyon comparingabsolutevalues,but insteadtheircorrespondingranks,thisproblemisequivalenttominimisingthefitnessfunction f(
x)
= |
x|
(wherethebranch distanceisnotnormalised)asanalysedinTheorem 3.Studyingthissimpleprogramallows ustoisolatetheimpactoftherangeandtheinitialdistancedfromtheoptimum ontherunningtimeoftheAVM.Ourtheoreticalresultsshowthat,whenthestartingpointischosenuniformlyatrandom fromaset
![Fig. 4. Number of unique fitness evaluations for optimizing f (x) = |x| with different local searches for each starting position x1 ∈ [−220, 220 − 1]](https://thumb-us.123doks.com/thumbv2/123dok_us/7889453.185789/14.561.43.506.50.306/number-tness-evaluations-optimizing-different-searches-starting-position.webp)