raf
-a.
.,-
..----.A0000077488
Design and development an underwater glider using remote control (RC) / Fadilah Mohd Zain.
DESIGN AND DEVELOPMENT AN UNDERWATER GLIDER
USING REMOTE CONTROL (RC)
Fadilah bte Mohd Zain
Bachelor of Mechatronics Engineering
"I hereby declare that I have read through this report entitle 'Design and Development an
Underwater Glider using Remote Control (RC)" and found that it has comply the partial fulfillment for awarding the degree o f Bachelor o f Mechatronics Engineering''
Signature
Supervisor's Name : En. Mohd Shahrieel b. Mohd Aras
DESIGN
AND
DEVELOPMENT AN UNDERWATER GLIDER USINGREMOTE CONTROL (RC)
FADILAH BINTI MOHD ZAIN
A report submitted in partial fulfillment of the requirements for the degree
of Bachelor of Mechatronics Engineering
Faculty of Electrical Engineering
I declare that this report entitle "Design and Development an Underwater Glider using Remote Control (RC)" is the result of my own research except as cited in the references. The report has not been accepted for any degree and is not concurrently submitted in candidature of any other degree.
Signature :
Name : Fadilah Binti Mohd Zain
To my beloved husband, father, mother and family
ACKNOWLEDMENT
I wish to thank my project supervisor, En. Mohd Shahrieel Bin Mohd Aras for his
guidance and teachings. And also would like to thank both panels for their guidance.
I would also wish to extend my gratitude to my parents for their support and their
understanding.
And of course to all my friends especially to my entire course mate that help me in this
ABSTRACT
Nowadays, an underwater glider being a new kind underwater vehicle which has no
external propulsion system equipped on it. It's driven depending on buoyancy adjustment of
itself and move horizontally wing. Underwater glider becomes more important especially in
oceanographic and this project is concerned with the design and development an underwater
glider using remote control (RC). This glider is designed by using a buoyancy control to make
the glider become float and using an hydrodynamic concept. The main part of this an
underwater glider consist of wings, tail, receiver and transmitter board, DC mota; fan and
remote control. In development of underwater glider, its control system design plays an
important role. This glider is controlled by using radio frequency (RF) with 4 channel. The
remote control (RC) will control the movement of a glider and the DC motor will be used to
rotate the fan. However, DC motor spins too fast and has too little torque to drive the loads.
Thus, gear reduction is required to slow down the rotational speed and increase the torque of
Pada masa kini, peluncur dalam air merupakan sejenis kenderaan bawah air yang baru
di mana ia tiada sistem penggerak luar yang dibina di dalamnya. Ia dipandu bergantung
kepada pelarasan keapungan dan sayapnya bergerak secara mendatar. Peluncur bawah air
menjadi lebih penting terutamanya di dalam oceanografi dan projek ini adalah berkenaan
dengan pembangunan dan rekabentuk peluncur dalam air menggunakan alat kawalan jauh.
Peluncur ini direkabentuk menggunakan kawalan apungan untuk membolehkan peluncur
tersebut terapung dan menggunakan konsep hidrodinamik. Bahagian utama peluncur ini
mengandungi sayap, ekor, papan litar penerima dan pemancar, motor DC, kipas dan alat
kawalan jauh. Dalam pembangunan peluncur dalam air, rekabentuk sistem kawalan
memainkan peranan penting. Peluncur bawah air ini dikawal oleh fiekuensi radio dengan 4
saluran. Alat kawalan jauh akan mengawal pergerakan peluncur dan motor DC akan di
gunakan untuk menggerakkan kipas. Bagaimanapun, motor DC berputar terlalu laju dan
mempunyai tork yang terlalu kecil. Oleh itu, pengurangan gear diperlukan untuk
TABLE OF CONTENTS
CHAPTER TITLE
ACKNOWLEDGEMENT
ABSTRACT
TABLE OF CONTENTS
LIST OF TABLES
LIST OF FIGURES
LIST OF SYMBOLS
LIST OF APPENDICES
INTRODUCTION
1 . 1 Introduction
1.2 Objective of project
1.3 Scope of project
1.4 Problem Statement
1.5 Methodology
1.6 Organization of report
1.7 Summary
LITERATURE REVIEW
2.1 Introduction
2.2 Slocum Glider
2.3 Spray's Glider
2.4 Seaglider's
2.5 Powered AUV Glider
2.6 Mini Underwater Glider (MUG)
2.7 General Design of an Underwater Glider
2.8 Factor Affecting of Underwater Vehicle
2.8.1 Buoyancy
2.8.2 Hydrodynamic Damping
2.8.3 Stability
3.9 DC Motor
2.10 Electric Power
2.1 Summary
METHODOLOGY
3.1 Introduction
3.2 Design Process
3.3 Solidworks
3.4 Simulation Result
3.5 Basic Mechanical Hardware
3.6 Build Mechanical Hardware Part
3.7 Electrical component
3.7.1 Actuators for the Underwater Glider
3.7.2 Rechargeable Battery Pack and Power
Adapter
3.7.3 The Underwater Glider Controller
3.7.4 Radio Frequency (RF)
3.7.5 Electric and Electronic Part
3.7.6 Differential Drive Method
RESULT 39
4.1 Introduction 39
4.2 Result 39
4.3 The Design Stage Using SolidWorks 40
4.4 Mechanical Part of Underwater Glider 42
4.5 Electric and Electronic Part of Underwater 44
GI ider
4.6 Final Result 46
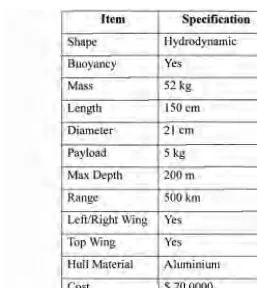
4.7 Specification and Features of Underwater Glider 47
4.8 Summary 48
ANALYSIS AND DISCUSSION 49
5.1 Introduction 49
5.2 Wavelength of Underwater Glider 49
5.3 Buoyancy Force of Underwater Glider 5 1
5.4 Analysis 54
5.4.1 Experiment 1 54
5.4.2 Experiment 2 5 5
5.4.3 Experiment 3 5 8
5.5 Summary 5 8
CONCLUSION
REFERENCES
viii
LIST OF TABLES
TABLE TITLE
PAGE
Technical Specification of Slocum Glider
Technical Specification of Spray's Glider
Technical Specification of Seaglider's
Technical Specification of Powered AUV Glider
Technical Specification of Mini Underwater Glider (MUG)
Basic Mechanical Parts Description
Electronic and Electric Component and Description
Differential Drive Method
The List of Electric and Electronic Component Used
Technical specification of Underwater Glider
LIST OF FIGURES FIGURE 1.1 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 2.10
2.1 1
2.12 2.13 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9 4.1 4.2 4.3 4.4
TITLE
PAGEFlow Chart of Project 3
The Slocum Glider 8
The Spray's Glider 10
Spray's Rolls 90" To Raise One o Its Wings 11
Schematic for The Main Components of Spray Glider 11
Seaglider's 13
Seaglider's Travel at Slopes 13
Powered AUV Glider 14
The Mini Underwater Glider (MUG) 17
The Force work in Buoyancy 20
The Magnitude of the Buoyancy Force 2 1
Stable and Unstable Configuration 22
Righting Moment Caused By Roll or Pitch of Vehicle 23
Right hand Rules 24
Flow Chart for PSM 28
The Design Flows of the Design and Development of Underwater Glider 29
Solidworks Software 3 0
Simulation Design using Solidworks 3 1
Mechanical Tools 33
Actuator 34
Rechargeable Battery Pack And Power Adapter Used For GliderBody 35
Remote Control and Battery for Controller 3 5
Antenna used for this glide 36
Design of Underwater Glider (Isometric View) 40
Design of Underwater Glider (Four View) 41
An Underwater Glider with All Dimensions 42
The Part of Underwater Glider's Body
An Underwater Glider with Remote Control
An Underwater Glider Float on Water Surface
Wavelenght of Underwater Glider
Force Acting On the Cube
Free Body Diagram
An Underwater Glider floats on Water Surface An Underwater Glider Moves Forward
An Undenvater Glider Moves Reverse
An Underwater Glider Turn Right
An Underwater Glider Turn Left
LIST OF SYMBOLS AUV mm kg km Mhz RC RF CETUS MUG B W T I k
v
DC F bYf
Vd PVC NAutonomous Underwater Vehicles
centimeter meter milimeter kilograms kilometers Megahertz Remote Control Radio Frequency
Composite Endosheleton Test bad Untethered Undenvater Vehicle
System
Mini Underwater Glider
Buoyant Force Weight Torque Current Constant Voltage Direct Current Buoyant force
Specific weight of the fluid
Displaced volume of the fluid
Polyvinyl Chloride
LIST OF APPENDICES
APPENDIX TITLE
A Article of Underwater Glider
B Article of Yellow Submarine
C DC Motor
PAGE
63
66
CHAPTER 1
INTRODUCTION
1.1 Introduction
This project is titled as "Design and Development an Underwater Glider Using
Remote Control (RC)". The main purpose of this project is to design and developed and
underwater glider using remote control (RC). Since nowadays there are many new kind of
underwater glider have been developed till an advanced state. The development of the
Underwater Gilder is presented as an example of the implementation process for a
mechatronic product.
An Underwater Glider is a underwater vehicle that is driven through the water by a
propulsion system and control by a remote control (RC).Radio frequency will be used as a
signal between a remote control (RC) and the glider body. There have a receiver and
transmitter board to transmit the signal. Motor and fan function as a thruster which being a
main part for movement purpose. There have 4 channels in the remote control.
An Underwater Glider has been designed by using SOLIDWORK software before
convert to the actual vehicle. The basic information about the remote control, hydrodynamic
1.2 Objective of project
The objectives of this project are to:
i. Design and developed an underwater glider using a remote control.
1 3 Scope of project
The scope of project in this project is stated as given:
i. Remote Control 4 channel for reverse, forward, turning right and left.
ii. DC motor to moves fan act as thruster.
iii. Solid work software to draw the design glider.
iv. PVC as material for glider body to float on the water surface.
1.4 Problem Statement
Ocean is a dangerous place for people to explore. The environment in the ocean is hard
to predict such as a composition of the surrounding fluid, current speed, tidal waters and life
forms in its natural habitats. So, it will give the problem for people to moves fiom one point to
another point with a limited time and dangerous environment. Besides that, 70% of the earth
recovers by water, so people need one vehicle to moves on the ocean without risking people's
life.
In order to solve the problem, an underwater glider is developed to help human. An
underwater glider is the one of the safest ways to explore the water is using smal&unmanned
vehicles to carry out various missions and measurements. Its can moves fiom one point to
another point with unlimited time to collect all data on ocean. We can control the movement of
the glider by using remote control. So, people just need to monitor the condition and
unmanned vehicles, a relatively simple and inexpensive underwater glider needs to be
designed.
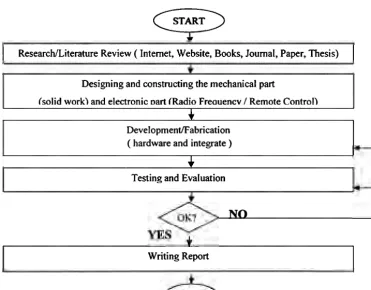
1.5 Methodology
The project methodology is an important chapter as the methodologies; design flow
and constructing of the project are discussed. Brief description is given about each procedure
in the completion of the project. The research work is undertaken in the following five
developmental stages. For better understanding of researchmethodology process, flow chart of
the project is shown in Figure 1.1.
START
Q
1
Researchniterature Review ( Internet, Website, Bwks, Journal, Paper, Thesis)I
Designing and constructing the mechanical part(solid work) and electronic Dart (Radio Freauencv 1 Remote Control)
+
Development/Fabrication
( hardware and integrate )
+
Testing and Evaluation
NO
[image:19.517.46.417.339.628.2]Writing Report
1.6 Organization of report
This presentation report is divided into six chapters. Each of the following paragraphs
generally described the contents of each chapter.
Chapter 1 Introduction
This chapter explained about the objectives, scopes of project, problem statement of this
project, and summarized a general methodology and t k main activities involved in this
project.
Chapter 2 Literature Review
This chapter gives of the general description and overview of the underwater glider. Some of
the literature review on An Undenvater Glider such as features, design, and concept is dso
discussed in this chapter. It also discussed the basic idea to understanding the underwater
glider such as their basic properties concept like material, controller and so on. In this chapter
also explained detail about basic parameter of underwater glder such as size of underwater
glider, shape and so on.
Chapter 3 Methodology
This chapter discussed the process of designing an underwater glider and shows description of
the mechanical part and electronic parts.
Chapter 4 Result
This chapter shows the results of the research
Chapter 5 Analysis and Discussion of the Result
Chapter 6 Conclusion
This chapter gives a summarized work and conclusion for overall of this project. Suggestion
for future improvements and advancements of this study are also discussed.
1.7 Summary
In this chapter, the introduction of the project is well discussed and described by
starting its objectives, scope of project, problem statement and research methodology that
would help the reader to have a better understanding the general idea about the project.
Consequently, literature review on underwater glider of the report are also discussed in the
CHAPTER 2
LITERATURE REVIEW
2.1 Introduction
This chapter shows all about the research before the underwater glider have been
design and develop. To build this project, it requires the knowledge that not readily offhand.
There are three main parts need to be investigated in order this project will be successfil,
design of the glider body for mechanical part, motor and remote control for controller purpose
and underwater glider concept such as a hydrodynamic shape and buoyancy adjustment. An
underwater glider is a type of Autonomous Underwater Vehicle (AUV) that uses small
changes in its buoyancy in conjunction with wings to convert vertical motion to horizontal,
and thereby propel itself forward with very low power consumption [l
1.
In order to design any underwater glider it is essential to have strong background knowledge and findamentalconcepts and theory about the processes and physical laws governing the underwater vehicle
in its environment. With regard to an Underwater Glider, factors such as stability,
hydrodynamic and buoyancy concept have to be taken into consideration. This chapter
introduces some of these fundamental concepts and ideas about Underwater Glider that are as
literature review. This chapter also will discuss about the theory and project background of
this project. The knowledge and fundamental concepts are very essentil before designing any
vehicle. This chapter introduces some of these fundamental concepts and ideas about
underwater glider, and also examines the general designof these vehicles. The mechanical and
electronic systems of Underwater Glider are also presented and examined closely to gain
2.2 Slocum Glider
In the year 2001, Teledyne Webb Research Corporation have developed and produced
an underwater glider that called "Slocum" as shown in Figure 2.1. A Slocum glider uses
gravity to descend and buoyancy to rise whiles its wings providing the forward motion of
about one kilometer per hour. The Slocum design is more robust. The body type of Slocum is
torpedo and added by wing. Slocum was optimized for shallo\v coastal operation. Slocum is
capable of operating in water as shallow as 5 m. Slocum use a simple aluminum hulls to resist
estemal pressure and provide a streamlined hydrodynamic shape. Slocum is designed to use
alkaline batteries which are safer and less expensive than lithium have a lower possibility of
explosive failure and less expensive per unit energy but Slocum can use lithium batteries to
extend life. Because the only power it needs is for varying its buoyancy and running its
electronics, the resulting long-range and duration make it ideal for long term data collection
over large swaths of ocean. Slocum guided only by GPS and researchers' commands, it
transmit scientific data via satellite to the home office and take new GPS bearings before
diving again.
"What we are working toward is connecting groups of gliders into networks that can
talk to each other and make decisions autonomously without the need for human intervention,"
Tom Swean, a scientist for the Office of Naval Research, says. "The thermal glider has a
distinct advantage," Jones adds. "If you can go up and down for free, that is, you are
harvesting energy from the ocean, then we can start talking about four- to five-year
Table 2.1 : Technical Specification of Slocum glider
[image:24.518.107.422.462.636.2]